AGV车辆转向机构设计 2
自动导引小车AGV的结构设计及自主移动规划
自动导引小车AGV的结构设计及自主移动规划一、概述自动导引小车(AGV,Automated Guided Vehicle)是一种具备自主导航、定位、移动、避障以及作业执行等功能的智能移动设备。
在现代工业生产和物流领域,AGV以其高效、灵活、精确的特点,被广泛应用于物料搬运、仓储管理、生产线自动化等场景,有效提升了生产效率和物流管理水平。
AGV的结构设计是其实现自主移动和作业功能的基础。
一个典型的AGV通常由车身、驱动系统、导航系统、传感器系统、控制系统以及作业执行机构等部分组成。
车身是AGV的承载平台,驱动系统负责提供动力并实现移动,导航系统确保AGV能够按照预设路径或指令进行自主导航,传感器系统用于感知周围环境并实现避障,控制系统则负责协调各部分的工作,实现AGV的自主移动和作业执行。
自主移动规划是AGV实现高效、准确移动的关键。
AGV需要通过路径规划算法,根据任务需求、环境信息以及自身状态,规划出最优的移动路径。
同时,AGV还需要具备实时避障能力,能够在遇到障碍物时及时调整移动路径,确保安全、顺畅地完成作业任务。
对AGV的结构设计及自主移动规划进行研究,不仅有助于提升AGV的性能和稳定性,还有助于推动工业生产和物流领域的自动化、智能化发展。
本文将从AGV的结构设计和自主移动规划两个方面进行深入探讨,为AGV的研发和应用提供有益的参考和借鉴。
1. AGV的定义与功能自动导引小车(Automated Guided Vehicle,简称AGV)是一种装备有电磁或光学等自动导引装置,能够沿规定的路径自动行驶,具有安全保护以及各种移载功能的运输车。
AGV是现代物流系统中的一种高效、灵活、智能的运输设备,广泛应用于制造业、仓储业、港口、机场等领域。
运输功能:AGV能够根据系统指令,自动将物料或产品从起点运输到终点,完成物料的搬运工作。
AGV的载重能力可以根据实际需求进行选择,从几百公斤到几吨不等。
导航功能:AGV通过内置的导航系统,如激光导航、电磁导航、视觉导航等,实现精确的路径规划和跟踪。
AGV的驱动转向系统设计
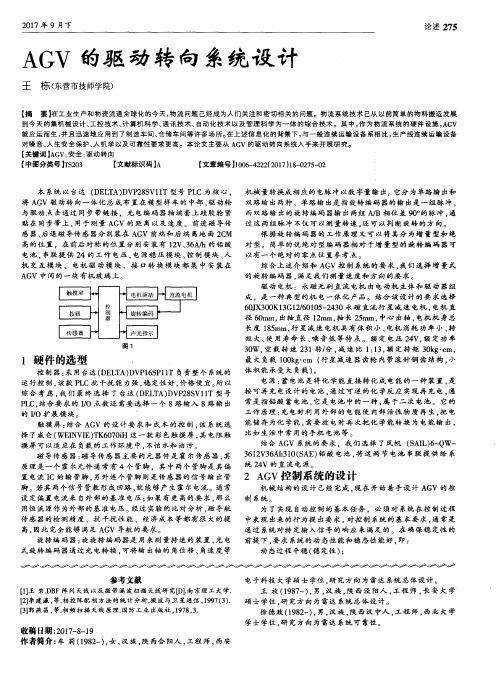
驱 动 电 机 : 永 磁 无 刷 直 流 电 机 由 电 动 机 主 体 和 驱 动 器 组
触 摸屏 k +
成 ,是 一种 典 型 的机 电一 体 化 产 品 。 结 合 该 设 计 的 要 求选 择
的I , 0扩 展 模 块 。
触摸 屏 : 结合 A G V的设计要 求和成本的控 制 . 该 系统 选 择 了威 仑 ( WE I N V I E) T K 6 0 7 0 i H 这 一 款 彩 色 触摸 屏 . 其 电 阻触 摸 屏 可 以适 应 在 负载 的 工作 环境 中 , 不 怕 水和 油 污 。
与 驱 动 点 击 通 过 同步 带 链接 .光 电 编 码 器 轴 端 套 上 硅 胶 轮 紧 贴 在 同步 带 上 , 用 于 测量 A G V 的 距 离以 及 速 度 。 前 进 磁 导 传 感器、 后 退 磁 导 传 感 器 分 别装 在 A G V 前 端 和后 端 离地 面 2 C M
6 o J X3 o 0 K1 3 G1 2 / 6 01 0 5 — 2 4 3 0永 磁 直 流 行 星 减 速 电 机 . 电 机 直
按 钮卜 + 器 制
传 感 器卜 . .
图1
控
径6 0 am, r 出轴 直 径 1 2 am, r 轴长2 5 m m, 中心 出轴 , 电机 机 身 总 长度 1 8 5 m m, 行 星 减 速 电机 具 有 体 积 小 、 电机 消 耗 功 率 小 、 转 矩大、 使 用寿命 长 、 噪 音 低 等 特 点 。额 定 电压 2 4 V, 额 定 功 率
控制器 : 采 用 台达 ( D E L T A) D V P 1 6 S P 1 1 T 负责整 个 系统 的
AGV车辆转向机构设计 2

毕业设计手册
(工科专业)
学生姓名:马凯林
指导教师:王宏志
专业:机械设计制造及其自动化班级: 0842
吉林工程技术师范学院教务处制
毕业设计选题论证书
毕业设计任务书
题目: AGV车辆转向机构设计
机械工程系(分院)机自动化专业 0842 班
学生姓名:马凯琳学号: 31 指导教师:王宏志职称:讲师
教研室主任:王桂萍
系(分院)主任:周广文
任务书下发日期:2011年12月26日
吉林工程技术师范学院教务处制
本科生毕业设计开题报告
题目 AGV车辆转向机构设计
院(系)____ 机械工程学院_ 专业_ 机械设计制造及其自动化
班级______ 0842__________ _ 姓名_____ 马凯琳________ _ 指导教师____ 王宏志_______ __开题时间2012年3月27日
吉林工程技术师范学院教务处制
一、课题研究意义
二、研究方案
三、设计(论文)课题评议
四、考核组成员
毕业设计指导教师评阅意见
注:优(90分以上);良(80~89);中(70~79);及格(60~69);不及格(60以下)
毕业设计指导教师评定成绩标准
注:如属论文且无设计图纸则将第11项的得分加到第12项中
毕业设计评阅人评阅意见
注:1.参照评价项目内涵与标准,A为合格、B为基本合格、C为不合格;2.有1个C,需修改后答辩,有1个以上C不同意答辩。
毕业设计答辩记录
毕业设计答辩小组评语及综合成绩
注:优(90分以上);良(80~89);中(70~79);及格(60~69);不及格(60以下)
毕业设计答辩成绩评定标准。
AGV自动导引小车结构系统全设计
第二章 机械部分设计2.1 设计任务设计一台自动导引小车 AGV ,可以在水平面上按照预先设定的轨迹行驶。
本设计采用 AT89C51 单片机作为控制系统来控制小车的行驶,从而实现小车的 左、右转弯,直走,倒退,停止功能。
其设计参数如下:自动导引小车的长度: 500mm自动导引小车的宽度: 300mm 自动导引小车的行驶速度: 100mm/s2.2 确定机械传动方案 2.3 直流伺服电动机的选择伺服电动机的主要参数是功率 (KW) 。
但是,选择伺服电动机并不按功率, 而是更根据下列三个指标选择。
运动参数:AGV 行走的速度为 100mm/s ,则车轮的转速为电机的转速选择蜗轮 -蜗杆的减速比 i=62n 电 in 62 22.75 1410.5r min( 2-2)自动导引小车的受力分析:1000v n πd 1000 6 3.14 14022.75 r min2-1)图2-3 车轮受力简图小车车架自重为P P ρabhg 2.85 103 0.5 0.3 0.032 9.8 134N 2-3)小车的载荷为G G m g 35 9. 8 34N3 (2-4)取坐标系OXYZ 如图2-3 所示,列出平衡方程由于两前轮及两后轮关于Y 轴对称,则F A F B,F C F DF z 0 ,2F A 2F C PG 0 (2-5)M x 0 ,0.075G 0.17P 2 0.3 F C 0 ( 2-6)解得F A F B 157. 6N6 F C F D 80.84N两驱动后轮的受力情况如图2-4 所示:滚动摩阻力偶矩M f 的大小介于零与最大值之间,即0 M f M m a x ( 2-7 )M max δF N 0.006 157.66 0.946N m (2-8)其中δ滚动摩阻系数,查表5-2[2],δ=2~10,取δ=6mm牵引力 F 为 F M max 0.94613.5N (2-9)d 0.0721) 求换算到电机轴上的负荷力矩(TLF W?D ?1 9.8 L2 G 10002) 求换算到电机轴上的负荷惯性 ( J L )0.0000349 10.004766 0.000131 0.00006046220.000036189 kg m 2其中 J 1 为车轮的转动惯量; J 2 为蜗杆的转动惯量;J 3 为蜗轮的转动惯量; J 4 为蜗轮轴的转动惯量。
基于机器视觉的agv自动转向结构设计
基于机器视觉的agv自动转向结构
设计
基于机器视觉的AGV自动转向结构设计是指利用机器视觉技术,利用相机实时采集路径上标志物的位置信息,将其与预先定义好的路径点位进行比对,从而实现AGV可以自动转向的功能。
具体来说,AGV自动转向结构设计要求实现一套满足工作要求的机器视觉系统,包括:1、相机及图像处理系统:用于实时采集路径上标志物的位置信息,并将其与预先定义的路径点位进行比对;2、AGV控制系统:用于实现AGV的自动转向;3、传感器:用于监测AGV的行进状况,以及避免与障碍物之间的碰撞;4、电控单元:用于控制AGV电机的转速。
此外,在AGV自动转向结构设计中还需要考虑车辆的历史轨迹记录,以及路径上障碍物的检测和处理等问题。
AGV自动导引小车结构系统全设计

AGV自动导引小车结构系统全设计AGV(Automatic Guided Vehicle)自动导引小车是一种能够自主行驶、无人操控的物流设备。
它可以通过激光导航、超声波导航、视觉导航等技术实现路径规划和避障,主要用于仓库、工厂等场所的物料搬运和运输。
下面将对AGV自动导引小车的结构系统进行详细设计。
1.机械结构系统:AGV的机械结构系统主要包括底盘、车体、传动系统和导航系统。
底盘是AGV的支撑结构,可以选择钢材或铝合金材料制作,具有足够的强度和刚性。
车体是AGV的外壳,一般采用塑料材料制作,具有一定的防护性能。
传动系统包括驱动电机、减速器和轮子,用于提供动力和驱动AGV行驶。
导航系统包括激光导航、超声波导航或视觉导航等技术,用于实现路径规划和避障。
2.电气控制系统:AGV的电气控制系统主要包括电源系统、控制系统和通信系统。
电源系统提供电能给AGV的驱动电机和其他电子设备,一般采用锂电池或铅酸电池,具有较长的续航能力。
控制系统包括主控单元、传感器和执行器,用于控制AGV的行驶、定位和操作。
通信系统用于与上位机或其他AGV进行通信,可以选择有线通信或无线通信方式。
3.路径规划和避障系统:AGV的路径规划和避障系统是实现自主行驶的关键。
路径规划算法可以根据仓库或工厂的布局和需求,确定最优的行驶路径,提高运输效率。
避障系统通过激光雷达、超声波传感器、摄像头等设备,实时检测周围环境,避免与障碍物发生碰撞。
4.软件系统:AGV的软件系统主要包括导航软件、控制软件和监控软件。
导航软件通过激光导航、超声波导航或视觉导航等技术,实现路径规划和避障。
控制软件负责控制AGV的行驶、定位和操作,根据传感器的数据进行决策。
监控软件用于实时监控AGV的运行状态和位置,提供远程控制和管理。
基于磁导航的agv转弯和校偏算法研究与设计
基于磁导航的agv转弯和校偏算法研究与设计AGV(自动导引车)是一种智能化物流设备,广泛应用于仓储物流、生产制造等领域。
磁导航技术作为AGV的核心定位和导航方式之一,对于AGV的转弯和校偏算法设计至关重要。
本文将围绕基于磁导航的AGV转弯和校偏算法展开研究与设计,以分析其原理、探讨算法优化方法,并提供相应的指导意义。
首先,我们来了解基于磁导航的AGV的工作原理。
磁导航是通过在地面铺设特殊的磁导带,AGV通过感应磁导带产生的磁场信息,来确定自身的位置和方向。
当AGV行驶到转弯和校偏的地方时,需要进行特殊的算法设计来实现平稳的转弯和自动校偏。
对于AGV的转弯算法设计,最常见且简单的方法是使用PID控制算法。
PID控制算法通过测量AGV当前位置与目标位置之间的误差,并根据误差的大小来调整AGV的转弯角度。
其控制过程主要分为比例、积分和微分三个环节。
比例环节根据误差大小来计算输出量,积分环节用于消除比例环节的静态误差,微分环节用于预测误差的变化趋势,从而使得AGV能够平衡地完成转弯操作。
在设计转弯算法时,还需要考虑AGV的机械结构和动力系统。
如果AGV的转弯半径较大,设计一个简单的PID控制算法即可。
然而,对于转弯半径较小的AGV,还需要考虑非线性因素的影响,例如转向角度与速度之间的关系。
在这种情况下,可以采用模糊控制算法或者神经网络控制算法进行优化,以实现更精确和稳定的转弯操作。
对于AGV的校偏算法设计,主要考虑的是避免AGV在行驶过程中偏离磁导带导致定位错误。
一种常见的方法是使用偏离角度检测算法,通过测量AGV当前位置和磁导带之间的角度偏差,并通过调整AGV的转向角度来使其保持在磁导带上行驶。
此外,还可以采用视觉识别算法,通过安装摄像头等设备来实时识别磁导带,从而实现校偏操作。
在算法设计过程中,还需要充分考虑AGV的实际应用环境和工作要求。
例如,如果AGV在转弯时需要尽量保持稳定性,可以通过增加转弯半径或者减小转弯速度来实现。
基于机器视觉的AGV自动转向结构设计
基于机器视觉的AGV自动转向结构设计许军;王宝梁;姚保军;陆尚;李国勤;赵梦诚【摘要】随着智能技术的迅速发展,基于机器视觉的Automated Guide Vehicle(AGV)已经广泛应用于工厂、仓储等领域,而基于机器视觉的AGV能够实现自主行走要依靠能够执行控制指令进行自动转向的结构.文章设计了一种自动转向结构,能够方便在现有的微型电车等现有的转向基础上进行安装,结构紧凑.【期刊名称】《汽车实用技术》【年(卷),期】2018(000)001【总页数】2页(P62-63)【关键词】机器视觉;AGV;结构设计;转向【作者】许军;王宝梁;姚保军;陆尚;李国勤;赵梦诚【作者单位】淮安信息职业技术学院,江苏淮安 220003;淮安信息职业技术学院,江苏淮安 220003;淮安信息职业技术学院,江苏淮安 220003;淮安信息职业技术学院,江苏淮安 220003;淮安信息职业技术学院,江苏淮安 220003;淮安信息职业技术学院,江苏淮安 220003【正文语种】中文【中图分类】U463.4引言目前,AGV作为一种运输车辆而广泛的应用于工厂中。
在物料搬运系统中起到非常重要的作用,它能够自动的将货物搬运至运材料处、将成品搬运到指定地点[1]。
基于机器视觉引导的 AGV在行驶过程中,摄像机动态获取车辆周围环境图像信息并与图像数据库进行比较,从而确定当前位置,并对下一步行驶做出决策。
智能AGV 小车机械结构向模块化、可轻易重构的方向发展[2]。
如动力模块中的电机、减速机、检测系统一体化,由机械模块、承载模块用重组方式架构AGV 整机,米克力美已有多款模块化智能 AGV产品在售。
因此文章设计了一种用于自动转向结构,通过配合视觉传感器、控制单元等能够将普通车辆改装成具有自动转向功能的AGV。
1 转向概述普通车辆的转向的结构基本一致,其中对于一些微型电动车辆来说,其实现转向的结构设计不同,按照动力作用位置来分,一般有如下两种转向方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计手册
(工科专业)
学生姓名:马凯林
指导教师:王宏志
专业:机械设计制造及其自动化班级: 0842
吉林工程技术师范学院教务处制
毕业设计选题论证书
毕业设计任务书
题目: AGV车辆转向机构设计
机械工程系(分院)机自动化专业 0842 班
学生姓名:马凯琳学号: 31 指导教师:王宏志职称:讲师
教研室主任:王桂萍
系(分院)主任:周广文
任务书下发日期:2011年12月26日
吉林工程技术师范学院教务处制
本科生毕业设计开题报告
题目 AGV车辆转向机构设计
院(系)____ 机械工程学院_ 专业_ 机械设计制造及其自动化
班级______ 0842__________ _ 姓名_____ 马凯琳________ _ 指导教师____ 王宏志_______ __开题时间2012年3月27日
吉林工程技术师范学院教务处制
一、课题研究意义
二、研究方案
三、设计(论文)课题评议
四、考核组成员
毕业设计指导教师评阅意见
注:优(90分以上);良(80~89);中(70~79);及格(60~69);不及格(60以下)
毕业设计指导教师评定成绩标准
注:如属论文且无设计图纸则将第11项的得分加到第12项中
毕业设计评阅人评阅意见
注:1.参照评价项目内涵与标准,A为合格、B为基本合格、C为不合格;2.有1个C,需修改后答辩,有1个以上C不同意答辩。
毕业设计答辩记录
毕业设计答辩小组评语及综合成绩
注:优(90分以上);良(80~89);中(70~79);及格(60~69);不及格(60以下)
毕业设计答辩成绩评定标准。