浅析新三角高程测量法
三角高程测量法的基本原理与实施步骤

三角高程测量法的基本原理与实施步骤高程测量是地理测量中的一个重要组成部分,它是确定地点在垂直方向上的高度差,从而推导出地形的起伏和变化情况。
三角高程测量法是一种常用且较为精确的高程测量方法之一,本文将介绍三角高程测量法的基本原理与实施步骤。
一、三角高程测量法的基本原理三角高程测量法基于三角形的相似性原理,它通过一个已知高度的基准点和两个相邻点之间的水平距离来计算出相邻点的高度差。
其基本原理如下:1. 角度测量:首先,我们需要测量出两个相邻点相对于基准点的水平方向的角度。
这可以通过定向测量仪等测量设备来完成。
测量精度要求高时,可以使用全站仪等高精度仪器。
2. 距离测量:在角度测量完成后,我们需要通过测距仪、测距杆等工具测量出基准点和相邻点之间的水平距离。
测距精度将直接影响测量结果的准确性。
3. 高度差计算:测量完成后,我们可以利用三角形的相似性原理,根据已知的角度和距离计算出两个相邻点的高度差。
具体计算方式是利用三角函数中的正切函数来求解高度差。
二、三角高程测量法的实施步骤实际进行三角高程测量时,我们需要按照一定的步骤来进行,以确保测量结果的准确性和可靠性。
下面是三角高程测量法的实施步骤:1. 确定基准点:首先,我们需要选择一个已知高度的基准点。
这个基准点可以是大地水准点、气象台、水坝等高程已知的地物。
在选择基准点时,需要考虑地理位置的便利性和高程的稳定性。
2. 设置测量站:在确定基准点后,我们需要设置测量站点,并在测量站点上安装测量设备,如全站仪等。
测量站点的选择应考虑到地势的平坦性和视线的通畅性,以确保能够准确测量角度和距离。
3. 开展测量:在测量站点设置完毕后,我们可以开始进行角度和距离的测量工作。
首先,利用测量设备测量出基准点和相邻点之间的水平角度;然后,利用测距仪等设备测量出基准点和相邻点之间的水平距离。
4. 计算高度差:在完成测量后,我们可以根据已知的角度、距离和基准点的高度,利用三角函数的运算来计算出相邻点的高度差。
简析三角高程测量新方法原理

简析三角高程测量新方法原理三角高程测量是工程施工中传递高程的一种基本的测量方法,由于传统的三角高程测量精度不仅受大气折光、垂直角观测精度等因素影响,更重要的是受量取仪器的高度产生的垂线偏差因素影响,故在施工单位中使用并不广泛,随着几何水准测量的发展,几何水准测量成为了精密高程控制的主要方法,而使传统的三角高程测量只是在一些特殊情况下(如山区、丘陵区等高差较大地区)的几何水准测量的补充。
近几年,随着国内高速铁路大规模的建设,而高速铁路多设计为高架路段,桥梁工程所占比例在70%以上,有的桥长达几十公里,要保证桥上的无砟轨道高程定位精度达到±1mm,如何将地面上的高程精确地引测到十几米高的桥面上,这是施工单位所必须要解决的测量难题。
根据无砟轨道施工精度要求,桥上每2km左右应引测一个二等水准点,若采用精密几何水准测量法,不仅实施难度非常大且精度也难以保证,而传统的三角高程测量虽然现场实施较简单,但是受大气折光、垂直角及垂线偏差等因素影响,就很难满足精度要求。
要实现把地面上的高程高精度地引测至桥上,若采用三角测量方法,关键是要消除仪器高度产生的垂线偏差的影响。
三角高程测量新方法的原理新方法的原理:就是全站仪任意点设站,后视地面上已知的高程控制点,前视待测高程点,设定前后视点上的棱镜高度一致,在测量过程中不需要量取仪器高和棱镜高,测量完成后推算出待测点的高程。
A点为地面已知高程点,B点为待求高程点,为了测量A点与B点间高差,在中间位置设立全站仪,A点与B点处分别安置等高棱镜组,利用三角高程测量原理可得(暂不考虑大气折光因素):HA+V-△h1=HB+V-△h2则A点与B点间高差△HA-B为:△HA-B=HB-HA=△h2-△h1 (1)由上式可知,A点与B点间高差已自行消除了仪器高和棱镜高,故影响三角高程测量精度的一个重要因素就消除了。
三角高程测量新方法的计算公式及精度分析1、单向观测三角高程测量高差的计算公式:(2)或:(3)式中 -------------三角高程测量的高差;-------------全站仪至棱镜的斜距;--------------全站仪至棱镜的平距;--------------垂直角;---------------全站仪高度;--------------棱镜高;-------------地球平均曲率半径,约为6370km;-------------大气垂直折光系数,根据实际情况一般取0.08~0.14;2、单向观测三角高程测量高差的误差计算公式:(4)因新方法中是不需要量取仪器高和棱镜高的,故不存在仪器高和棱镜高的误差的,则式(4)可变换为:(5)3、测量精度分析:由式(5)可知,单向观测三角高程测量高差的误差只与距离、垂直角的误差和两气差有关,因此A点与B点间的高差计算公式为:(6)或:(7)由上式可推导出A点与B点的高差误差公式为:(8)单向观测三角测量误差分析如下:采用测角精度2"、测距精度2mm±(2*D)ppm全站仪和带气泡的对中杆棱镜组进行三角高程测量时,即、,控制测距在250m以内,垂直角在28°以内,球气差误差一般按()进行计算,則可达到三、四等水准精度(三等为,四等);若采用测角精度1"、测距精度1mm±(1*D)ppm全站仪、强制归心安装精密棱镜组,进行三角高程测量时,控制测距在100m之内、垂直角在25°以内,则可达到二等水准精度,即三角高程测量新方法的应用石武客运专线河北段,大部分路段为高架桥,架梁后桥面与地面的平均高差在20m左右,而根据无砟轨道施工要求,每2km一处应从地面高程控制点引测至桥面上。
浅论三角高程测量新法

下 面 从 理 论 上 分 析 一 下 这 种 方 法 是 否正 确 。 结 合 ( ) ( ) H = + ・a 1 、3 : W D tn
O () t 4
A , 点 安置反射镜于 B 。仪器发射 的光 点 束由A至 B 经反射镜反射后又返 回到仪 。 器。设光速 c 为已知 , 如果光束在待测距 离 D上往返传播 的时间 s 已知 , 则距 离 D
可 由下 式 求 出 : Dc / = ×s 2 式 中 c 2 /n C =1 , 。 ,。
这就 是三 角高程 测量 的基本公 式 , 它 但 是 以水平 面为基准面和视线成直线 为前
提 的 。 因 此 , 有 当 A 、 两 点 问 的 距 离 只 B
H 为待测 点 的高程 , 为测 站 中 w
高 , 镜高均 为任 一值 。施 测前不 必设 棱
定 。 )
作 , 被称 为“ 站仪 ” 都配有 反光镜 , 故 全 。
即跟 踪 杆 。 如 图一 所示 , 测 距 原 理 是 : 其 欲测 定 A、 点 间 的距 离 D, 置 仪 器 于 B两 安
3 仪器测站点高程重新设定为 w, . 将
H 得到 B点 的高 程 H 。
如图一 , 假设 B点 的高程已知 , A点的高 程为未 知 , 这里 要通过 全站仪 测定其 他
D ・ nO ’ t t a
( 8 )
、
三 角 高 程测 量 的 传 统方 法
由( 、 ) 5 I 可知: )8 两种方法测出的待测
点高程在理论上 是一致的 。也就是说我 们采取这种 方法 进行 三角高程测量是正
确 的 。.
EDM三角高程测量新方法精度分析及在工程中的应用
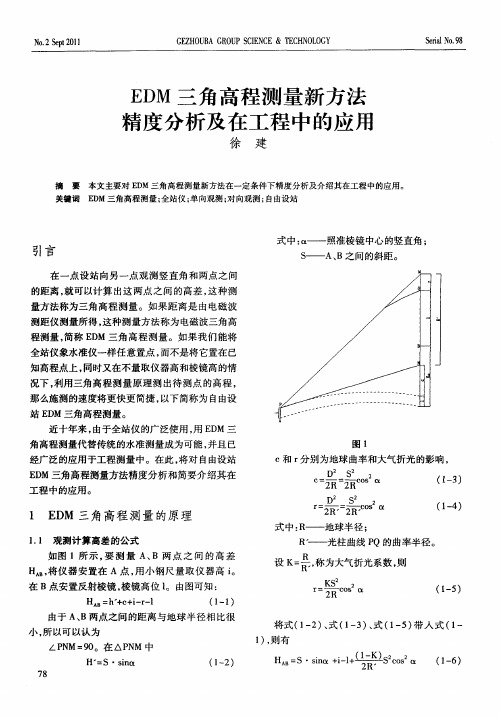
角 高程测量 竖直角 观测 误 差 对 高 程误 差 影 响 为
p 。
大于②的影响; 当边长大于 20 9m时②的影响较之
其他 3项 的影 响就越来 越大 , 竖直 角的测 定误 差成 为 E M 三角 高程 测量 的 主要误 差 。因此 , 采取 D 应 适 当的措施 提 高竖直 角 观 测 精度 以及 减 小仪 器 高 和棱镜 高 的量取误 差 。
式 ( - ) 中仪 器 高 和棱镜 高 为观 测值 , 以 16 其 所 i l 独立 观测 , 和 为 由误 差传 播定 律 :
如果 我们 能将 全站 仪象 水准 仪 一样 任 意置点 , 而 不是 将它 置在 已知高 程 点上 , 时又 在不 量取 仪 同 器 高 和棱镜 高 的情 况下 , 用三 角 高程 测量 原理 测 利
将式 ( — ) 式 ( — ) 式 ( — ) 人 式 ( — 12 、 1 3 、 15 带 1 1 , 有 )则
(- ) 12
HA = s +_+ B s. i il n
s cs 仪 o2
(- ) 1 6
21 0 1年 6月第 2期
葛 洲坝集 团科 技
总第 9 期 8
式 (- ) 1 6 即单 向观 测 计 算 高 差 的 公 式 。 我们 从传 统 的三 角 高程测 量方 法 中我 们 可 以看 出 , 他具
近十年来 , 由于全站 仪 的广 泛使用 , E M三 用 D
角高 程测量代 替传统 的水 准测 量成为 可能 , 且 已 并
经广 泛的应用 于工程 测量 中 。在 此 , 对 自由设站 将
]● ●●●●● ●●●●●,● - 圈 1 1
c和 r 分别 为地球 曲率 和大气折 光 的影 响 ,
浅谈三角高程测量方法及精度分析

第33卷第6期2010年12月测绘与空间地理信息G E O M A TI C S&S PA T I A L l N FO R M A T I O N T E C H N O L O G YV01.33.N O.6D ec.,2010浅谈三角高程测量方法及精度分析崔克忠(吉林省地理信息工程院。
吉林长春130051)摘要:分析了一般的三角高程测量方法的局限性,在实践中总结了一种便捷的三角高程测量的新方法。
同时还论证了用三角高程测量代替三、四等水准测量的理论依据,并采用全站仪任意置站的方法,测量时不必量取仪器高、棱镜高,既减少了三角高程的误差来源,又加快了施测速度。
关键词:三角高程;精度;操作方法;论证中图分类号:P224.2文献标识码:B文章编号:1672—5867(2010)06—0215—02N ew M et hod of T r i gonom et r i c L evel i ng and A ccur acy A nal ys i sC U I K e—z hong(Ji l i n I n st i t ut e of G eom at i cs E ngi neer i ng,C han gchun130051,C hi na)A b s t ra c t:Thi s pape r ana l yz es t he ge ne r al l i m i t at i on s of t r i gon om e t r i c l eve l i ng m et h od,s um m ed up i n pr act i ce a new conveni ent m et h—od of t r i gon om e t r i c l ev el i ng.I t al s o de m ons t r a t e s t he t heor et i ca l basi s of usi ng t r i gonom et r i c l eve l i ng i ns t ead of l evel m ea s u r e m e n t.U-s i ng t he m et h od of any on e s et po i nt by t o t al s ta t ion,i t i s not ne ce ssa r y t o m e as ur e t he hei g ht of i n st r u m en t and pr i sm,w hi c h not oll l y r educ es t he t r i gon om e t r i c l eve l i ng er r or sou r ces,but al s o acc el er at es t he sur veyi ng s peed.K e y w o r ds:t r i gon om e t r i c l ev el i ng;acc ur acy;oper at i on m e t ho d;di s cus si o n0引言1三角高程测量原理及精度城市规划是城市建设和发展的龙头,城市测绘是规划编制和管理的基础。
全站仪三角高程测量的新方法范文

随着社会的进步,使用跟踪杆配合全站仪测量高程的方法越来越普及,而传统的三角高程丈量方法已经显示出了局限性。
经过临时摸索,总结出一种新的方法进行三角高程丈量。
这种方法既结合了水准丈量的任一置站的特点,又减少了三角高程的误差来源,同时每次丈量时还不必量取仪器高、棱镜高。
使三角高程丈量精度进一步提高,施测速度更快。
工程的施工过程中,经常涉及到高程丈量。
保守的丈量方法是水准丈量、三角高程丈量。
两种方法虽然各有特色,但都存在着不足。
水准丈量是一种直接测高法,测定高差的精度是较高的但水准丈量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程丈量是一种间接测高法,不受地形起伏的限制,且施测速度较快。
大比例地形图测绘、线型工程、管网工程等工程丈量中广泛应用。
但精度较低,且每次丈量都得量取仪器高,棱镜高。
比较麻烦并且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用保守的三角高程丈量方法已经显示出了局限性。
经过临时摸索,总结出一种新的方法进行三角高程丈量。
这种方法既结合了水准丈量的任一置站的特点,又减少了三角高程的误差来源,同时每次丈量时还不必量取仪器高、棱镜高。
使三角高程丈量精度进一步提高,施测速度更快。
一、三角高程丈量的激进方法如图一所示,设AB为地面上高度不同的两点。
已知A点高程HA 只要知道A点对B点的高差HA B即可由HB=HA +HA B得到B点的高程HBD为AB两点间的水平距离;α为在A点观测B点时的垂直角;i为测站点的仪器高,t为棱镜高;HA 为A点高程,HB为B点高程;V为全站仪望远镜和棱镜之间的高差(V=Dtanα)首先我假设AB两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。
为了确定高差hA B可在A点架设全站仪,B点竖立跟踪杆,观测垂直角α,并直接量取仪器高i和棱镜高t若AB两点间的水平距离为D则hA B=V+i-t故 HB=HA +Dtanα+i-t1这就是三角高程丈量的基本公式,但它以水平面为基准面和视线成直线为前提的因此,只有当AB两点间的距离很短时,才比较准确。
浅谈新三角高程测量法

浅谈新三角高程测量法摘要在工程的施工过程中,常常涉及到高程测量。
传统的测量方法是水准测量、三角高程测量。
两种方法虽然各有特色,但都存在着不足。
水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。
在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。
但精度较低,且每次测量都得量取仪器高,棱镜高。
麻烦而且增加了误差来源。
这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
因此,只有当A,B两点间的距离很短时,才比较准确。
当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。
这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。
我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点1、全站仪必须架设在已知高程点上2、要测出待测点的高程,必须量取仪器高和棱镜高。
上式除了Dtanа即V的值可以用仪器直接测出外,i,t都是未知的。
但有一点可以确定即仪器一旦置好,i值也将随之不变,同时选取跟踪杆作为反射棱镜,假定t值也固定不变。
从(2)可知由(3)可知,基于上面的假设,HA+i-t在任一测站上也是固定不变的.而且可以计算出它的值W。
HB′为待测点的高程按三角高程测量原理可知将(3)代入(6)可知这里i′,t′为0,所以:由(5),(8)可知,两种方法测出的待测点高程在理论上是一致的。
也就是说我们采取这种方法进行三角高程测量是正确的。
综上所述:将全站仪任一置点,同时不量取仪器高,棱镜高。
仍然可以测出待测点的高程。
测出的结果从理论上分析比传统的三角高程测量精度更高,因为它减少了误差来源。
整个过程不必用钢尺量取仪器高,棱镜高,也就减少了这方面造成的误差。
同时需要指出的是,在实际测量中,棱镜高还可以根据实际情况改变,只要记录下相对于初值t增大或减小的数值,就可在测量的基础上计算出待测点的实际高程。
新方法进行三角高程测量的原理

精密三角高程测量一、 精密三角高程测量的原理如图1,为了测量点A 到点B 的高差,在O 处安置全站仪、A 处安置棱镜,测得OA 的距离A S 和垂直角A α,从而计算O 点处全站仪中心的高程O Ho H =A H +A L -A h ∆(1)然后再在过度点1I 处安置棱镜,测得O 1I 的距离1S 和垂直角1α,从而计算1I 点处高程1H1H =0H +1h ∆-1L (2)点A 和点1I 高差为1o h1o h =0H +1h ∆-1L -(o H -A L +A h ∆)=1h ∆-A h ∆+A L -1L (3)图 1然后在下一个转点1O I 处架设仪器,将原A 点的棱镜架设到2I ,1I 处的棱镜旋转与1O 处的全站仪对准。
同理可计算出1I 和2I 两点高差12h12h =2h ∆-'∆1h +1L -2L (4)同理可得第I 点与B 点的高差为iB hiB h =B h ∆-'∆ih +i L -B L (5)点A 和点B 高差AB ∆H 为AB ∆H =1o h +12h +…+iB h=1h ∆-A h ∆+2h ∆-'∆1h +…+B h ∆-'∆i h +A L -B L (6) 从上式可看出,欲求的点A 和点B 的高差中已消去了个转点棱镜高, 并且与仪器高无关,也就不存在量取仪器高,只需精确量取起点和终点的棱镜高。
从而大大减小了量取仪器高和棱镜高而引起的误差。
二、三角高程测量的精度分析1.单向观测三角高程测量高差的计算公式为v i Rs k s -+⨯-+=∆2cos )1(sin h 22αα(7)式中,h ∆为三角高程测量的高差,s 为仪器到棱镜的斜距; α为垂直角,k 为大气垂直折光系数,k=1.14,R 为地球平均曲率半径,R = 6 370 km; i 为仪器高;v 为规牌高或棱镜高。
三、单向观测三角高程测量高差的误差公式为222222222cos )(sin v i k s hm m m R s m s m m ++∙⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡+=∆ρααα (8)从上式可知单向观测三角高程测量高差的误差与距离、垂直角的误差,大气折光误差和量测仪器高、棱镜高误差有关。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
浅析新三 角高程测量法
王德 业 吴 勇 赵 杰
( 阳 河务 局 ) 济
在 工 程 的施 工 过 程 中 , 常 涉及 到 高 程 测 点 的高程 。 常 量 。传 统 的 测 量 方 法 是 水 准 测 量 、 角 高 程 测 三 图中: D为 A、 B两 点 间 的水 平 距 离 ; 为 在 量 。两 种方 法虽 然 各 有 特 色 , 都存 在 着 不 足 。 A点 观测 点 时 的垂 直 角 ;为测 站点 的仪 器 高 , 但 i 水准测 量是 一种 直接测 高法 , 定高 差 的精度 是 t 测 为棱 镜 高 ; HA为 A 点高 程 , H 为 B 点 高 程 ; V 较高 的 , 水准 测 量 受地 形 起伏 的 限制 , 业 工 为 全 站 仪 望 远 镜 和 棱 镜 之 间 的 高 差 (V = 但 外 作 量大 , 施测 速度 较慢 。三 角高程 测 量是 一种 间 D aa 。 tn ) 接 测 高法 , 它不 受地 形 起 伏 的 限制 , 施 测 速 度 且 首先我 们 假 设 A, 两 点 相 距 不 太 远 , 以 可 较 快 。在大 比例 地 形 图测 绘 、 型工 程 、 网 工 将 水 准 面 看 成水 准 面 , 不 考 虑 大 气 折 光 的影 线 管 也 程 等工程 测量 中广 泛应用 。但 精度 较低 , 每次 响。 为 了确 定高差 h 可在 A点 架设 全站 仪 , 且 在 测量 都得 量取仪 器 高 , 镜高 。较 麻烦 而且 增加 点竖 立 跟 踪 杆 , 棱 观测 垂 直 角 a 并 直 接 量 取 仪 , 了误 差来 源 。 器高 i 和棱镜 高 t若 A, 两点 间 的水 平距 离 为 , 随着全 站仪 的广 泛使 用 , 用 跟踪杆 配合 全 D, h口 使 则 ^ =V+i —t 站仪测 量 高程 的方法越 来 越普及 , 统 的三 角高 传 故 H 月 B= +D a a+i tn —t () 1 程测量 方法 已经 显 示 出 了他 的局 限性 。经 过 长 这就 是三 角 高程测 量 的基 本公 式 , 它是 以水 平 但 期 摸索 , 我们 总结 出一 种新 的方 法进 行三 角 高程 面为基 准 面和 视线成 直线 为前 提 的。 因此 , 只有 测 量 。这种方 法 既结 合 了水 准测 量 的任 一 置 站 当 A, 两 点 间 的距 离 很 短 时 , 比较 准确 。 当 B 才 的特 点 , 减少 了三 角高 程 的 误差 来 源 , 又 同时 每 A, 点距 离较远 时 , B两 就必须 考 虑地球 弯 曲和 大 次测量 时还 不必 量取仪 器 高 、 镜 高 。使 三 角高 气折 光 的影 响 了 。这里 不 叙 述 如何 进 行 球 差 和 棱 程 测量 精度进 一 步提高 , 施测 速度 更 快 。 气 差 的改正 , 只就三 角高程 测量 新法 的一 般原理 1 三 角高程 测量 的传统 方 法 进 行 阐述 。我们 从 传 统 的三 角 高程 测 量 方 法 中 如 图所示 , 图 略 ) ( 。设 A, 为地 面 上 高 度 我们 可 以看 出 , 它具备 以下 两个 特点 : 不 同 的两点 。 已知 A点 高程 , 只要 知 道 A点 1全站仪必须架设在已知高程点上 , . 对 点 的 高差 即可 由 =HA+ 得到 B 2要 测 出待测 点 的高程 , . 必须 量取 仪器 高 和
把 以新 环 境 带 分析 。全站仪 的垂 直角 、 水平 角 直接 在显示 屏 上 去 , 那 边 好 的经 验 与技 术 带 过来 , 显示 , 直 角 、 平 角 可 有 另 外 两 人 ( 录 与 计 动新 发 展 , 垂 水 记 变安 于 现 状 为推 陈 出新 , 固定 思 维 变 进 时) 同时观读 , 观看浮标 人员不必再 承担角度 观读 为发 展 眼光 , 一步促 进 黄河水 文 工作 的开展 。 总之 , 偏僻 地 区 的水 文 测 验 是 一 个 突 出 问 任务 , 可以专心 瞄视追踪 浮标 , 既使 不很 明显 的天 然漂 浮物也能很容易 观测其飘浮 流动过 程 。每个 题 , 人 员 测验 技 术水 平 和 素 质 、 其 对测 验 工 作 安 站 只需 配一架有 显示 窗 口的 电子经 纬 仪 , 用 流 全 认 识 深度 、 验 的设 施 条 件 、 测验 新 技 术 的 利 测 对 对科 技 攻关 的信 心 与 热度 等 , 需要 都 冰做 浮标 , 三个人 即可 完成整个 浮标 观测工作 。 了解 情 况 、 7 开展 技术 人才 交流 引起 足 够 的重视 , 近几 年小 河站 大洪水 的 出现说 明 , 文现代 化不 应忽 视偏僻 测 站 的现代化 。 水 偏僻 地 区 的 水 文 测 站 分 布 间 距 大 , 通 不 交
.
1 ・ 7
棱镜高。
下 面从 理论 上分 析一 下这种 方法 是否 正确 。 2 三角高程测量的新方法 结合 ( ) ( ) 1 , 3 如果 我们 能将 全 站仪 象 水 准 仪一 样 任 意 置 =W+D t a n a () 4 点 , 不是 将 它 置在 已知 高 程点 上 , 而 同时 又在 不 为待测 点 的高程 ; 为测站 中设 定 的测站 W 量 取仪器 高 和棱镜 高 的情 况 下 , 用三 角高程 测 点高 程 ; 测站 点 到 待 测点 的水 平 距 离 ; 利 D为 a为 量 原理测 出待 测点 的高 程 , 么施 测 的速度将 更 测站 点到待 测点 的观测 垂直 角 ; 那 快 。如 图一 , 设 曰点 的 高 程 已 知 , 假 A点 的高 程 从 ( ) 知 , 同待 测 点 的 高程 随 着测 站 点 4可 不 为 未知 , 里要 通过 全站 仪测定 其 它待测 点 的高 到其 的水 平 距 离 或 观 测 垂 直 角 的变 化 而 改 变 。 这 程 。首先 由( ) 1 式可 知 : 将 () 入() 3代 4 可知 : H = 一( tn i ) a HB D a a+ —t () 2 皤 = +i t n 月 — +D t a a () 5 上式 除 了 Daa即 的值 可 以用 仪器 直 接 测 出 tn 按三角 高程测 量原 理可 知 外 ,,都是未知 的。但有一点 可 以确定 即仪 器一 it t =W+ n / # D t a +i一t a () 6 旦置好 ,值也 将 随之 不变 , i 同时选 取 跟踪 杆作 为 将 () 3 代人 ( ) 6 可知 : 反射棱镜 , 假定 t 值也 固定不 变 。从 ( ) 2 可知 : =月 +i t D tn — + a +i一t a () 7