机械原理(平面机构的力分析新)解析
孙桓《机械原理》笔记和课后习题(含考研真题)详解(平面机构的力分析)【圣才出品】

第4章平面机构的力分析4.1 复习笔记一、机构力分析的任务、目的和方法1.作用在机械上的力根据力对机械运动影响的不同,可分为两大类。
(1)驱动力①定义驱动机械运动的力称为驱动力。
②特点驱动力与其作用点的速度方向相同或成锐角,其所作的功为正功,称为驱动功或输入功。
(2)阻抗力①定义阻止机械运动的力称为阻抗力。
②特点阻抗力与其作用点的速度方向相反或成钝角,其所作的功为负功,称为阻抗功。
③分类a.有效阻抗力机械在生产过程中为了改变工作物的外形、位置或状态而受到的阻力,即工作阻力。
克服这类阻力所完成的功称为有效功或输出功。
b.有害阻抗力机械在运转过程中所受到的非生产阻力。
克服这类阻力所作的功称为损失功。
2.机构力分析的任务和目的(1)确定运动副中的反力运动副反力是指运动副两元素接触处彼此作用的正压力和摩擦力的合力。
(2)确定机械上的平衡力或平衡力偶平衡力是指机械在已知外力的作用下,为了使该机构能按给定的运动规律运动,必须加于机械上的未知外力。
3.机构力分析的方法对于不同的研究对象,适用的方法不同。
(1)低速机械惯性力可以忽略不计,只需要对机械作静力分析。
(2)高速及重型机械①惯性力不可以忽略,需对机械作动态静力分析。
②设计新机械时,由于各构件尺寸、材料、质量及转动惯量未知,因此其动态静力分析方法如下:a.对机构作静力分析及静强度计算,初步确定各构件尺寸;b.对机构进行动态静力分析及强度计算,并据此对各构件尺寸作必要修正;c.重复上述分析及计算过程,直到获得可以接受的设计为止。
二、构件惯性力的确定构件惯性力的确定有一般力学法和质量代换法。
1.一般力学方法如图4-1-1(a)所示为曲柄滑块机构,借此说明不同运动形式构件所产生的惯性力。
(1)作平面复合运动的构件惯性力系有两种简化方式。
①简化为一个加在质心S i上的惯性力F I2和一个惯性力偶矩M I2,即F I2=-m2a S2,M I2=-J S2α2②简化为一个大小等于F I2,而作用线偏离质心S2一定距离l h2的总惯性力F I2′,而l h2=M I2/F I2F′I2对质心S2之矩的方向应与α2的方向相反。
1机械原理课件_东南大学_郑文纬_第七版第09章_平面机构的力分析111解析

惯性力:是一种虚拟加在有变速运动的构件上的力。
惯性力是是阻力还是驱动力? 当构件减速时,它是驱动力;加速时,它是阻力 特点:在一个运动循环中惯性力所作的功为零。低速机械的惯性力 一般很小,可以忽略不计。
二、研究机构力分析的目的
确定运动副反力。
因为运动副中反力的大小和性质对于计算机构各个零 件的强度、决定机构中的摩擦力和机械效率、以及计 算运动副中的磨损和确定轴承型式都是有用的已知条 件。
选定一点B, 再选定另一点为K
可以任意选择两个代换点
B b B
S k S
K
mB mK m mB (b) mK k 0
mk mB bk
K
mb mK bk
动代换
两质量点动代换: 选定一点B; 则另一点为K。
不能同时任意选择两个代换点
mB mK m
K k
mB (b) mK k 0
例 9- 6
例9-6 p367
5 E Aω 1
1
Fi5 G5
6 Fr
D B 2 3
4
在如图所示的牛头刨床机构 中,已知:各构件的位置 和尺寸、曲柄以等角速度 w1顺时针转动、刨头的重 力G5、惯性力Fi5及切削 阻力(即生产阻力)Fr。
C
试求:机构各运动副中的反力及需要施于曲柄1上的平 衡力偶矩(其他构件的重力和惯性力等忽略不计)。
π
Fi 2 Fi 2b Fi 2k
5、动静法应用
不考虑摩擦时机构动静法分析的步骤:
1. 求出各构件的惯性力,并把其视为外力加于产生 该惯性力的构件上; 2. 根据静定条件将机构分解为若干个杆组和平衡力 作用的构件; 3. 由离平衡力作用最远的杆组开始,对各杆组进行 力分析; 4. 对平衡力作用的构件作力分析。
机械原理-第02章 平面连杆机构及其设计 - 平面连杆机构的力分析
件惯性力对机械性能的影响。
G′
2020年4月23日星期四
5
§2-5 平面连杆机构的力分析
WHUT
3、机构力分析的方法
静力分析和动态静力分析。
由于最初设计时,各构件的结构尺寸、形状、材料、质量及 转动惯量未知,因而惯性力(矩)无法确定。此时,一般先 对机构作静强度计算,初步确定各构件尺寸,然后再对构件 进行动态静力分析及强度计算,并以此为依据对各构件作必 要的修正。一般不考虑摩擦力的影响。
(2) 绕定轴转动的构件
a. 回转轴线通过构件质心
S
Pi = 0 Mi = -Js ε ( ε = 0 或 ε ≠0 ) b. 回转轴线不通过质心
Pi = -mas Mi = - Jsε
其中:h=Mi/Pi
2020年4月23日星期四
WHUT
Pi' Pi
h S
Mεi
8
§2-5 平面连杆机构的力分析
(3) 作平面复合运动的构件
2020年4月23日星期四
21
WHUT
(2) 判定构件间的相对转向
F
R12
R12
ω21
v
1
2
R23ω23
3Q
ω14
4
R41
R32R32
R43
(3) 判定作用力在摩擦圆上切点位置
Q R23
R21
F
R43 R41
(4) 依据力平衡条件求解
对构件3:Q + R23 + R43 = 0 对构件1:R21 + R41+ F = 0
2020年4月23日星期四
3
§2-5 平面连杆机构的力分析
2、机构力分析的任务和目的
机械原理第八版答案与解析

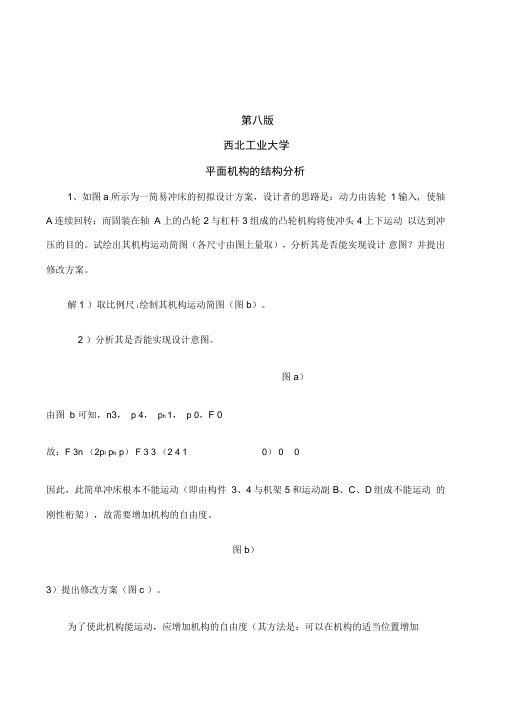
机械原理第八版答案与解析Prepared on 22 November 2020机械原理第八版 西北工业大学平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a )由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图 c1) 图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图 b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度 3-3解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F 4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p (其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
机械原理第八版答案与解析
第八版西北工业大学平面机构的结构分析1、如图a所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入, 使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解1 )取比例尺i绘制其机构运动简图(图b)。
2 )分析其是否能实现设计意图。
图a)由图 b 可知,n3,p 4,p h 1,p 0,F 0故:F 3n (2p l p h p) F 3 3 (2 4 1 0) 0 0因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B、C、D组成不能运动的刚性桁架),故需要增加机构的自由度。
图b)3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c给出解 3— 1: n 7, p i 10,P h 解 3 — 2: n 8,p i 11, P h3n 了其中两种方案)图cl ) 图c2 )2、试画出图示平面机构的运动简图,并计算其自由度图a )3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
解:n 3,p 4, P h 0, F 3n 2p i P h 1 解:n 4,p i 5, p h 1, F 3n 2p i P h 1 3n 2p i2P i解3-3: n 9 , p 12 , p h 2, F 3n 2p i P h 14、试计算图示精压机的自由度解:n 10,p l 15,p h 0解:n 11,P i 17,P h 0(其中E、D及H均为复合铰链)(其中C F、K均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
又如在该机构中改选EG为原动件,试问组成此机构的基本杆组是否与前者有所不同。
机械原理第四章 力分析
FN21/2
G
FN21/2
式中, fv为 当量摩擦系数 fv = f / sinθ
若为半圆柱面接触: FN21= k G,(k = 1~π/2)
摩擦力计算的通式:
Ff21 = f FN21 = fvG
其中, fv 称为当量摩擦系数, 其取值为:
G
平面接触: fv = f ; 槽面接触: fv = f /sinθ ; 半圆柱面接触: fv = k f ,(k = 1~π/2)。
说明 引入当量摩擦系数之后, 使不同接触形状的移动副中 摩擦力的计算和比较大为简化。因而这也是工程中简化处理问题
的一种重要方法。
(2)总反力方向的确定
运动副中的法向反力与摩擦力 的合力FR21 称为运动副中的总反力, 总反力与法向力之间的夹角φ, 称 为摩擦角,即
φ = arctan f
FR21
FN21
机械原理
第四章 平面机构的力分析
§4-1 概述 §4-2 运动副中总反力的确定 §4-3 不考虑摩擦时平面机构的动态静力分析 §4-4 机械的效率和自锁 §4-5 考虑摩擦时机构的受力分析
§4-1 概述
一、作用在机械上的力
有重力、摩擦力、惯性力等,根据对机械运动的影响,分为两类: (1)驱动力 驱动机械运动的力。 与其作用点的速度方向相同或者成锐角; 其功为正功, 称为驱动功 或输入功。
放松:M′=Gd2tan(α φv)/2
三、转动副中摩擦力的确定
G
1 径向轴颈中的摩擦 1)摩擦力矩的确定
转动副中摩擦力Ff21对轴颈的摩
擦力矩为 Mf = Ff21r = fv G r
轴颈2 对轴颈1 的作用力也用
ω12
Md O
平面机构的力分析
G
1)FR21偏斜于法向反力一摩擦角φ ;
2) FR21偏斜旳方向应与相对速度v12旳方向相反。
(2)槽面接触旳移动副
G FN 21 FN 21 0 22
FN 21 2
G
sin(90 ) sin 2
FN 21
G
sin
F
F 2 N 21 f
G
f G
f
f 21
2
sin
sin
θ
FN21 2
举例: 例4-1 斜面机构
正行程:F= G tan(α +φ) 反行程:F ′ = G tan(α - φ)
例4-2 螺旋机构 拧紧:M = Gd2tan(α +φv)/2 放松:M′=Gd2tan(α -φv)/2
2. 转动副中摩擦力旳拟定
(1)摩擦力矩旳拟定
转动副中摩擦力Ff21对轴颈旳摩 擦力矩为
t Mf
其总反力方向旳拟定为: 1)总反力FR21旳方向与 法向反力偏斜一摩擦角;
2)偏斜方向应与构件1相对
构件2旳相对速度v12旳方向相反。
n
Ff21
2
FR21
φn FN21
ω12
1
V12 t
§4-5 考虑摩擦时机构旳受力分析
例 铰链四杆机构考虑摩擦时旳受力分析 例 曲柄滑块机构考虑摩擦时旳受力分析 小结 在考虑摩擦时进行机构力旳分析,关键是拟定运动副 中总反力旳方向, 而且一般都先从二力构件作kf
fV 当量摩擦系数
k 1~ 2
摩擦力计算旳通式:
Ff21 = f FN21 = fvG
平面接触: fv = f ; 槽面接触: fv = f /sinθ ; 半圆柱面接触: fv = k f ,(k = 1~π/2)。
机械原理-平面机构的力分析
传动条件
曲柄摇杆机构、齿轮传动机构
存储条件
转动机构、滑动机构
力的基本概念
1 力的作用点
力作用的位置或接触点。
2 力的方向
力作用的方向或施力线。
3 力的大小
力作用的大小或强弱。
平面机构的受力分析
1
受力分析
2
根据力的分解结果,分析各构件的受力情况。
3
力的分解
将力分解为平行于连接构件的分力和垂直于 连接构件的分力。
交叉槽的弯曲影响
交叉槽是指曲柄和滑块之间存在的交叉形状,它会导致机构的弯曲失效和运 动不稳定。
非正交曲柄机构的分析
1 自由度分析
根据曲柄滑块机构的结构,确定其自由度以及运动学约束。
2 力分析
通过力的平衡分析,确定机构各处的力大小和方向。
3 运动模拟
使用模拟软件或物理实验,验证机构设计的正确性和稳定性。
摆线和椭圆曲柄机构的分析
摆线曲柄机构
利用摆线曲线的特性,实现更平稳的运动传动。
椭圆曲柄机构
利用椭圆曲线的特性,实现更精确的运动传动。
内嵌框架的应用
机构设计
通过内嵌框架的布局,实现机构零 件的紧凑排列和高效传动。
机器人技术
内嵌框架在机器人领域的应用,提 高了机器人的稳定性和工作效率。
汽车工程
通过内嵌框架的结构布局,实现汽 车发动机和悬挂系统的高性能和节 能效果。
力的平衡
通过分析和计算,判断平面机构是否处于力 的平衡状态。
计算机构的自由度
自由度是指机构中独立变量的个数,它决定了机构的运动和约束情况。
平面机构的结构形式
齿轮传动
通过齿轮的啮合来实现转动传动功 能。
机械原理-第02章-平面连杆机构及其设计---平面连杆机构的力分析精选全文完整版
将构件的质量假想地集中在某几个预定的点上,使其产生的 力学效应保持不变,这种方法称为质量代换法,假想的质量称 为代换质量,预定点称为代换点。
(1) 质量代换的等效条件
m1 s
m2
n
a. 代换前后构件的质量不变;Σi=m1 i= m
n
b. 代换前后构件的总质心位置不变;
Σi=m1 i xi = 0
n
Σi=m1 i yi = 0
n
c. 代换前后构件对质心轴的转动惯量不变。 Σi=m1 i ( x2i + y2i ) = 0
质量代换法主要用于绕不通过质心轴转动的构件或平面复杂运 动构件的惯性力(力偶矩)计算。
2024年10月16日星期三
10
§2-5 平面连杆机构的力分析
a. 动代换。同时满足上述三 个代换条件的质量代换。对 连杆有:
机构力分析常用方法:图解法和解析法。
2024年10月16日星期三
6
§2-5 平面连杆机构的力分析
WHUT
二、构件惯性力的确定
一般力学法和质量代换法。
1、一般力学法
h s Mi
由理论力学知:惯性力可以最终简化为一个加 Pi′
Pi
于构件质心S处的惯性力Pi和一个惯性力矩Mi,
即:
Pi = -mas
Mi = - Jsε
结论:
(1) 摩擦角与摩擦系数一一对应, j = arctgf;
(2) 总支反力永远与运动方向成90°+ j 角。
2024年10月16日星期三
14
§2-5 平面连杆机构的力分析
WHUT
(2) 楔形面摩擦
θ
θ
以滑块作为受力
体,有
1
机械原理 第四章 平面机构的力分析
FN 21 FN 21dq
1
0
设: FN 21 g(G)
FN 21 FN 21dq g(G) dq kG
0
0
(k ≈1~1.57)
Ff 21 fFN 21 kfG
q
2
FN21
G
令kf fv Ff 21 fvG
4)标准式
不论两运动副元素的几何形状如何,两元素间产生的滑动摩 擦力均可用通式:
❖拧紧——螺母在力矩M作用下逆着G力等速向上运动,相当于在滑块2上加
一水平力F,使滑块2沿着斜面等速向上滑动。
F G tg( ) M F d2 d2 G tg( )
22
❖ 放 松 —— 螺 母
G/2
G/2
顺着G力的方向等
1
速向下运动,相 当于滑块 2 沿着
2
G
F G
斜面等速向下滑。
i 1
2)代换前后构件的质心位置不变;
静
❖以原构件的质心为坐标原点时,应满足: 代
n
mi xi
i 1 n
0
mi
i 1
yi
0
3)代换前后构件对质心的转动惯量不变。
换
动 代 换
n
mi
x
2 i
y i2
Js
i 1
动代换:
用集中在通过构件质心S B
的直线上的B、K 两点的代换
S
b
c
C
质量mB 和 mK 来代换作平面
F G tg( )
M F d2 d2 G tg( ) 22
时,M ' 0 阻力矩(与运动方向相 反)
当 时,M ' 0
时,M ' 0 驱动力(与运动方向相 同)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FI 2
2
2
3
A φ S2
S2
C
FI2
B 1
A φ S2
2 S2
3 C
FI 3
2 质量代换法
质量代换法的目的 质量代换法的实质是为了简化构件惯性力的计算。
用一般力学方法须同时求得构件的惯性力FI和惯性力矩MI 。而 采用质量代换法可省去惯性力矩MI的计算,使问题得到简化。 质量代换法的方法
把构件的质量用集中作用在构件的几个选定点的假想集中
48.6 5 103.4rad / s2 2.35
c c
p
aCt B aS 2
b
s2
c b
3 求惯性力和惯性力矩
(1)活塞 3 的惯性力
FI 3 m3 aC
m3 pc a
6 495 (2)连杆 2 上的惯性力和惯性力矩 c b
FI 2 m2aS 2 19 290 5510N
FI
aS
aS
S
a
n S
A ω=C
ε
a
n S
MI
A
3) 作平面运动构件惯性力的确定
FI maS 0 MI JS 0
也可将上述 惯性力。
aS
FI , M合成I 为距质心S为距离h的总
h MI
FI
FI
ε
MI S
aS
, FI ε S
例 1 在图示的凸轮机构中,已知凸轮的半径R=200mm,LOA=100mm
平衡力
驱动力―根据机构的阻力大小选择适当的驱动力来平衡 生产阻力―根据机构的驱动力大小选择适当的阻力来平衡
平衡力即可以是驱动力又可以是阻力
机构力分析的目的
1) 为现有机械工作性能的评价、鉴定提供参数; 2) 为新机械的强度计算、结构设计提供重要依据。
机构力分析的方法
图解法 解析法
驱动力
作用在机械上的力
活塞及其附件的质量 S2 16.9kgm2 ,曲柄转
速 n1 300r / min , 45, 求图示位置时活塞3的的惯性力和
连杆2的总惯性力。
解:1.运动分析
B
aS 2 ps2 a
1 Aφ
aS 2
S2
2
2
aCt B
3 C
585 290m/ s2
2
aCt B lBC
cc a BC l
p
匀速直线移动构件的惯性力: FI ma s 0
加速直线移动构件的惯性力: FI ma s 0
aS ―质心的加速度
V=
FI 0
C
S
aS
FI
S
2) 定轴转动构件惯性力的确定
① 构件的质心在转轴
匀角速度ω转动 FI maS 0
MI JS 0 角加速度ε转动 FI maS 0
MI JS 0
从动件的质量为m2=20kg,凸轮的角速度ω1=20rad/s。当OA线 在水平的位置时,求从动件2的惯性力。
解:1. 高副低代
2.运动分析(过程略)
aB2
o(b)
C
3
b
C
3
2
B R
FI 2 2
B
aB2
p
p
o
oA
1
1
O
A aB2 pb a
1
3.受力分析 FI 2 m2aB2 m2 pb a 2023.4 468N
质量来代替。 B
FI ε
1
2
A aS
S2 m2
MI C3
质量代换法的方法
把构件的质量用集中作用在构件的几个选定点的假想集中 质量来代替,这些假想的集中质量被称作代换质量。 B、K为所选定的代换点 mB 、 mk为代换质量
mB B
1
2
A
mk
S2
k
C3
应用质量代换法应满足的条件
1) 代换前后构件的质量不变; 2) 代换前后构件的质心位置不变;
同时满足三个条件 的叫做动质量代换
3) 代换前后构件对质心轴的转动惯量不变;
mB mk m2
mBb mk k mBb2 mK k 2 J S2
第四章 平面机构的力分析
§4—1机构力分析的任务、目的和方法 §4—2 构件惯性力的确定 §4—3 机构力分析的任务、目的和方法 §4—4 不考虑摩擦时机构的力分析
§4—1机构力分析的任务、目的和方法
机构力分析的任务 1)确定运动副中的反力 运动副反力指运动副处作用的正压力和摩擦力的合力 2)确定机械中的平衡力 平衡力是指机械在已知外力的作用下,为了使该机械能按 给定运动规律运动,还须加于机械上的未知外力
0
VS 0 aS 0
0
VS 0 aS 0
ω S
ε
MI
S
构件的质心不在转轴
匀角速度ω转动 FI maSn 0 MI JS 0
角加速度ε转动 FI maS 0
MI JS 0
FI
S
aSn lAS 2 0
aS lAS 0
aSn lAS 2 0 aS lAS 0
2.受力分析
M I 3 J33
b1(b2 )
b2 (b3)
0.2231
46N m
p(b3 )
A
4
C p
1 1aB3
2
B
3 MI3
3
例3 在图示发动机曲柄滑块机构中,已知曲柄长度 lAB 0.35m,
连杆长度 lBC 2.35m,连杆重心 S2 至曲柄销轴B的距离
l BS 2 m3
0.83m,连杆的质量 m2 19kg , 6kg, 连杆对其重心的转动惯量 J
例2 在图示的摆动导杆机构中,已知LAC=200mm, LAB=100mm,
φ=90°,导杆的重心在C点,导杆对重心C的转动惯量J3=0.2kg·m2 曲柄的等角速度ω1=20rad/s。求导杆3的惯性力矩。
解:1 运动分析(过程略)
3
aB3 lBC
pb3 a BC l
231rad / s2
件的外形、位置或状态时所受到的阻力,克服这些阻力 就完成了工作。如机床中作用在刀具上的切削阻力,起 重机提升重物的重力等都是有效阻力。
有害阻力―为非工作阻力,克服这些阻力所做的功纯粹
是一种浪费,故称为损失功。摩擦力、介质阻力等 一般为有害阻力。
§4—2 构件惯性力的确定
1 构件惯性力的确定 1) 直线移动构件惯性力的确定
阻抗力
有效阻力 有害阻力
驱动力―驱使机械运动的力。驱动力与其作用点的速度
方向相同或成锐角,其所作的功为正功。
阻抗力―阻止机械运动的力。阻抗力与其作用点的速度方向相
反或成钝角,其所作的功为负功。
驱动力
F
1
V12
<90
2 2
阻抗力
F
1
V12
>90
阻抗力又可分为
有效阻力―即工作阻力,它是机械在生产过程中为了改变工
M I 2 JS 2 2 16.9 103.4 1768N m
B 1 Aφ
MI2
S2
aS 2
FI 2
2 2
3 C
FI 3
(3)连杆 2 的总惯性力和作用线的位置:
H M I 2 1748 0.317m FI 2 5510
h
H2
l
0.317 0.03
10.56mmM
MI2
F
A
B
B 1