智能循迹机器人竞赛规则
机器人走迷宫竞赛规则

小型机器人走迷宫(地面循迹)一、场地场地组成:竞赛场地由10×10块正方形模块组成,每块模块为20cm×20cm。
模块表面底色刷白色油漆,底色上利用黑色压光油漆绘出轨迹,所有模块包括如下5种:a) b) c) d) e)1:只有3号对管检测到黑线(如a),180度转弯2: 只有3号和6好对管检测到黑线(如b),直走3: 只要当左边三个对管(1&2&3号)都检测到黑线(如c, d, e,),左转90度。
4:右边三对管(3&4&5号)都检测到黑线,6号没检测到黑线(如c),右转90度。
5:右边三对管(3&4&5号)都检测到黑线,6号也检测到黑线(如d),直走。
注:6号对管位置稍靠前,前后位置差大于黑线宽。
所有模块包括出发(终止)区、转折区和中间赛道。
出发(终止)区为竞赛的起点和终点,转折区为竞赛单程的终点,这两个区域均采用a)类模块。
赛场中间赛道可采用以上任意一类模块。
转折点、终点采用a)类模块,并在轨迹所对的底边安装一个到位碰撞开关。
二、比赛用小型机器人竞赛所使用的小型机器人长宽不应大于20cm×20cm,其它结构、控制方式、运动方式不做要求。
三、比赛过程准备:机器人停放在出发区,面向出口;启动:出发区利用喇叭发出一声短促的“滴”声作为启动指令,机器人收到声音后立即启动,同时计时系统开始计时;正向穿越迷宫:机器人自主循迹,搜索达到转折点的路径,到达转折点须碰撞到位开关;返回终点:比赛终点即出发区,机器人从转折点折返,以正程搜索的最短路径返回出发区并碰撞终点到位开关,计时系统停止计时。
四、胜负判决比赛以机器人在迷宫中往返所需总时间为判决依据,用时短者获胜。
五、违规机器人必须沿地面轨迹行驶,若直接穿越白色地面从某地面轨迹进入另一轨迹则视为违规;机器人脱离2m×2m的赛场则视为违规。
发生违规的机器人应退回起点,重新开始,但用时累计。
机器人竞速比赛规则

机器人竞速比赛规则1.比赛形式2.参赛机器人限制参赛机器人可以是自主机器人或遥控机器人。
自主机器人是指能够根据预设程序或算法自行行动的机器人,而遥控机器人是指由人类操控的机器人。
参赛机器人可以具有不同的形状和尺寸,但必须符合安全和公平性的要求。
3.赛道设计赛道应该具有足够的长度和宽度,以便机器人有足够的空间进行操作。
赛道上应设有一些障碍物和目标点,以测试机器人的灵敏度和反应能力。
障碍物可以是各种大小和形状的物体,例如障碍块、斜坡、桥梁等。
4.赛事分类5.比赛时间比赛的时间应根据赛事分类和赛道难度进行设定。
一般来说,比赛时间在几分钟至半小时之间。
比赛时间过长可能会导致机器人能量耗尽或参赛者耐心不足。
6.比赛评判比赛的评判可以根据机器人的完成时间和任务完成情况进行。
完成时间是指机器人从起点到终点的时间,通常使用计时器记录。
任务完成情况是指机器人是否成功通过赛道上的障碍物和达到目标点。
7.安全措施8.参赛者要求参赛者可以是个人或团队。
每个参赛者或团队只能使用一台机器人参赛。
参赛者应熟悉机器人的操控技术和赛事规则,并遵守比赛组织者的要求。
9.奖项设置10.比赛宣传和推广比赛组织者应及时宣传和推广机器人竞速比赛,以吸引更多的参赛者和观众。
宣传可以通过各种渠道进行,如社交媒体、广告、主题报道等。
比赛组织者还可以邀请媒体和专业人士进行报道和评审,增加比赛的影响力。
总结:机器人竞速比赛是一项旨在测试机器人速度和操作能力的竞技活动。
比赛通过设定不同的赛事分类和赛道设计,考验参赛机器人的灵敏度和反应能力。
比赛时间、赛道安全和参赛者要求都应符合相应的规定,并设置相应的奖项和宣传推广。
机器人竞速比赛的规则和形式可以根据参赛者和组织者的需求进行调整和补充。
山东省大学生机器人大赛比赛规则1

山东省大学生机器人大赛比赛规则一、基本规则1.每一组参赛的学生和指导教师都应仔细阅读本规则,并了解其含义。
2.参赛选手进入比赛场地时,必须佩带参赛证件并随时接受工作人员或裁判员的核查。
3、各参赛队员应自备用于程序设计的电脑和参赛用的各种器材,各项比赛使用的编程语言不限。
4、各项比赛过程中,参赛队员一般不应增加、删除、变更机器人的软件和硬件,如需加固硬件,须经裁判员同意。
5、比赛前30分钟,参赛队员应按比赛要求,将参赛机器人摆放到指定区域,没有在规定时间内摆放到位的,取消比赛资格。
比赛开始前,任何人都不能再触摸参赛机器人,否则取消比赛资格。
6、比赛过程中只允许裁判员、工作人员和参赛选手进入比赛场地,其他人员不得进入。
7、因比赛环境、设施不满足比赛条件时,参赛选手可向项目裁判组长提出申请,并经裁判组长批准后方可重新比赛,否则成绩无效。
8、参赛队员必须服从裁判员,比赛进行中如发生异议,须由领队提出申请复议,赛事组委会接受和对复议事项做出最终裁决。
9、比赛期间,赛场内外一律禁止使用无线电、红外设备或其它方式控制机器人。
凡规则未尽事宜,解释、决定权归赛事组委会。
二、象棋机器人比赛规则一、比赛任务自行设计一台象棋机器人,在规定时间内由起始位置出发,按“车”、“炮”、“马”顺序及相应走棋规则推到指定的“帅位”,“象”为不可移动棋子。
二、比赛场地1.比赛场地为不小于2000mm×2200mm的矩形区域,表面由白色KT板覆盖,周围无挡板。
2.比赛区域尺寸为1600mm×1800mm。
3.比赛区域内划分为200mm×200mm的方格,方格线为黑色防滑胶带,线宽为15~20mm(常规为17mm)。
4.比赛场地平面图如附图1所示。
三、器材要求1.机器人(1)机器人体积大小不超过长20厘米,宽20厘米,高20厘米。
此尺寸为机器人所有部件伸展后的尺寸。
机器人重量不限。
机器人的车体、电机驱动板可以使用主办方推荐器件,也可使用自制器件。
智能机器人比赛规则
智能机器人比赛规则智能机器人比赛是一项刺激、激烈且极具挑战性的竞赛活动。
参与者的机器人将经过一系列的测试和比较,以决出最出色的机器人团队。
为了保证比赛的公正和规范性,下面将详细介绍智能机器人比赛的规则。
一、参赛机器人资格要求1. 参赛机器人应具备自主学习和智能判断的能力,能够在复杂环境下自主决策。
2. 参赛机器人应当符合相关安全要求,不能对人体和环境造成危害。
3. 参赛机器人团队应当具备必要的技术能力和人员配备,能够进行机器人的设计、制作和调试。
4. 参赛机器人可以由单一团队或多个团队合作组成,但每个团队只能提交一台机器人。
二、比赛项目和要求1. 导航挑战:机器人需要在复杂迷宫中,通过自主识别和导航的方式,找到指定目标点。
机器人在完成任务过程中,需要避开障碍物、迂回绕道,并快速准确地到达目标点。
2. 抓取挑战:机器人需要凭借自身的机械手臂或其他相应机构,完成指定形状物体的抓取和搬运任务。
机器人在任务中需要根据不同的物体形状和位置变化,调整抓取方式并成功完成任务。
3. 对话挑战:机器人需要具备语音识别和语义理解的能力,能够与操作员进行自然对话。
机器人需要能够正确理解操作员的指令,并给出明确准确的回应,以完成指定的任务。
4. 交互挑战:机器人需要通过视觉识别和动作规划,与人类进行实时的交互。
机器人需要跟随人类的指引,完成给定的任务,例如:握手、帮助人们搬运物体等。
三、比赛规则和评分方式1. 参赛机器人完成任务的时间将作为最终评分的重要指标,时间越短,得分越高。
2. 参赛机器人在执行任务过程中,如发生失误或出现故障,将会扣除相应的分数。
3. 机器人中途或在任务完成后,需自主回到起点。
如果机器人不能自主完成回到起点的任务,将会扣除相应的分数。
4. 常规任务和高级任务将有不同的得分要求,高级任务难度更大,得分更高。
5. 评分标准包括任务完成度、时间效率、准确度和机器人的创新性。
四、比赛安全和纪律要求1. 比赛过程中,参赛机器人应当遵守相关的安全规定,如不能抛洒危险物品、不能对其他机器人或人员造成伤害等。
轨迹机器人规则
轨迹机器人竞赛规则
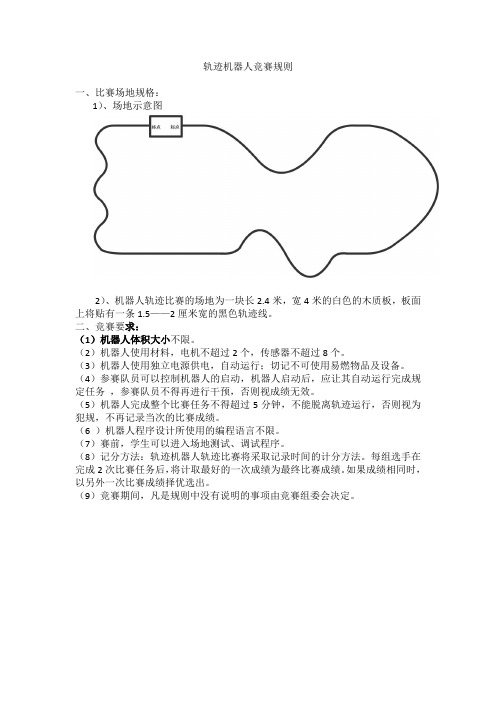
一、比赛场地规格:
1)、场地示意图
2)、机器人轨迹比赛的场地为一块长2.4米,宽4米的白色的木质板,板面上将贴有一条1.5——2厘米宽的黑色轨迹线。
二、竞赛要求:
(1)机器人体积大小不限。
(2)机器人使用材料,电机不超过2个,传感器不超过8个。
(3)机器人使用独立电源供电,自动运行;切记不可使用易燃物品及设备。
(4)参赛队员可以控制机器人的启动,机器人启动后,应让其自动运行完成规定任务,参赛队员不得再进行干预,否则视成绩无效。
(5)机器人完成整个比赛任务不得超过5分钟,不能脱离轨迹运行,否则视为犯规,不再记录当次的比赛成绩。
(6 )机器人程序设计所使用的编程语言不限。
(7)赛前,学生可以进入场地测试、调试程序。
(8)记分方法:轨迹机器人轨迹比赛将采取记录时间的计分方法。
每组选手在完成2次比赛任务后,将计取最好的一次成绩为最终比赛成绩。
如果成绩相同时,以另外一次比赛成绩择优选出。
(9)竞赛期间,凡是规则中没有说明的事项由竞赛组委会决定。
智能机器人比赛规则

智能机器人比赛规则竞赛目标:普及信息技术知识和智能机器人知识与技能,培养学生的创新能力和动手能力,丰富中小学生的科技活动,推动中小学信息技术教育的发展。
赛项:智能机器人竞赛包括机器人足球 (2对2)、机器人循线和机器人创新设计比赛。
机器人足球比赛一、竞赛规则(一)机器人1.直径。
机器人必须能放入直径为22cm的垂直圆柱桶内。
机器人的所有部件必须全部伸展后才能作为测量尺寸(具体尺寸见规则一、(三)1.)。
2.高度。
机器人高度不超过22cm。
3.控制。
机器人必须是自动控制,必须由参赛队队员手动启动,不允许以各种遥控的方式控制机器人。
4.标识/颜色。
要求参赛队员标记或装饰他们的机器人,以便识别同一支队伍的机器人。
机器人颜色/光线发射必须不影响其他机器人的光感读数。
5.参赛队。
一支参赛队最多由2个机器人组成。
6.结构。
只要符合上述要求,且机器人的设计与搭建主要由参赛队员完成,就可以使用任何机器人套装或积木设计机器人,也可以使用电子和金属零部件设计机器人(见一、(三)2.) 。
机器人部件可以使用胶水、螺丝钉等材料固定。
7.机器人占据球的范围。
定义为:固定在机器人两条突出直条所包含的内部空间。
机器人占据球的纵深不能超过20mm(如右图)。
8.守门员。
如果在比赛中使用守门员,守门员不允许只做单向运动,它必须能朝各个方向移动。
当足球运动到离球门45cm的范围内,守门员必须对球作出反应,否则将被视为“损坏的机器人”(见二、(十))。
9.进攻队员。
如果机器人损坏了足球,机器人将被从场地上拿走且被视为损坏的机器人。
参赛队队员应对该机器人作出调整以防止再出现这种情况。
如果机器人再次损坏足球,将被取消该场比赛资格。
(二)球1.决赛用球。
决赛采用由Wiltronics研究中心制造的MK2红外球(直径约为7.5cm)。
此球发光均匀,且发射红外光。
2.厂商。
ROBOCupJunior技术委员会已经测试了以下两种电子球,它们的性能相似。
比赛规则(1)

A组:控制器为非计算机编程的机器人,芯片不限。
B组:控制器为计算机编程的机器人,芯片不限。
参赛用智能车长、宽、高不得大于25cm(含伸展长度)。参赛队员 每人一车,比赛期间不得拿出场地。比赛器材赛前需接受检验,请 裁判员验收,发现型号错误或控制器软硬件改造,取消参赛资格。
二、智能遥控接力赛(集体项目,每队2人)
4.不在可用列表中的物品不得带入赛场。 不得携带包含有毒有害、易燃易爆的材料参与活动,禁止使用各种有尖有刃、电
动启动的工具参加竞赛。
五、现场编程(个人项目)
1、比赛器材
单片机主板、电池盒及电池、电源等。
每名选手自备一套比赛器材,进入赛场前需检查、调试自
备器材及工具,比赛计时开始前设备需保持初始状态,可
2个棱长为15cm的立方体(有一红、一蓝、两黑),立方体距离轨迹8
厘米,智能车从中识别出红、蓝两种颜色的立方体,识别对了加分,
识别错了扣分,赛道中心有一内直径为20cm的圆形区域作为停车位, 圆的边为2cm宽的轨迹,在圆的四个方向有4条宽2cm的轨迹与赛道相 连。
二、智能遥控接力赛(集体项目,每队2人)
四、少年创客赛
(六)竞赛要求 1.每参赛队有2平米活动空间,现场提供220v供电。 2.可以使用的材料列表 电子元件、面包板、控制器、单片机外围模块、导线、搭 建结构用塑料件、纸、文具、五金件、3D打印耗材(限 PLA)。
四、少年创客赛
3.可以使用的工具包括 螺丝刀、尖嘴钳、3D打印笔、手锯。 参赛队的所有材料、设备及工具需放入一个整理箱,整理箱长宽高不 得超过50cm*50cm*50cm,笔记本电脑自备,不必放入整理箱,并在入 场前向场内裁判提交箱内物品纸质清单。
二、智能遥控接力赛(集体项目,每队2人)
智能寻轨器竞赛规则

智能寻轨器竞赛规则一、项目描述选手现场制作具有行驶功能的智能寻轨器并在规定的跑道上进行行驶比赛。
二、竞赛要求和方式(一)竞赛时选手自带未经处理、制作过的指定套材,样机不得带入,在指定赛场、按时独立完成制作和调试任务。
(二)现场制作和调试时间:制作:各组制作时间均为40分钟。
调试:各组调试时间均为10分钟。
(三)各参赛选手的赛场和序号,由电脑随机产生,赛前公告。
(四)智能寻轨器由3节五号电池供电,电池自备。
(五)制作赛必须现场制作,当场评比,只进行一轮竞赛。
(六)行驶赛是在制作赛的基础上进行调试后,进行两轮行驶。
(七)制作后被判为不合格的,不得参加行驶赛。
制作赛合格的选手在调试后统一参加行驶赛。
(八)选手自带焊接和制作工具(包括烙铁架),现场不提供工具、零配件和耗材,选手之间不得相互借用和调剂。
(九)电动工具(如电动、半自动螺丝刀、电钻等)不允许使用。
(十)制作使用的“模板”(即形同智能寻轨器,用于示意、辅助制作的器具)不得使用。
三、成绩判定(一)制作:现场制作,当场评定。
运动员制作完成智能寻轨器这一时刻为制作时间,时间精确到秒。
1、电子线路部份:焊接和安装工艺与“现场电子制作竞赛”要求相同(3只发光二极管除外),调节到具有识别黑色和白色的功能,并不得增减元器件或变动电子线路。
2、机械部份:套材安装符合图纸及说明书要求、不得少装螺丝及部件。
当场演示左右轮黑色停,白色转,指示灯能正常工作。
该智能寻轨器评为合格。
不符合上列条件之一者无成绩。
(二)行驶:在规定时间内将制作好的智能寻轨器进行调试后,由裁判安排顺序,在指定跑道上行驶,每当智能寻轨器尾轮通过一个分值区时,裁判员应唱出分值。
成绩按尾轮最后通过的分值记录,区域分最高为100分,前后间隔分值详见跑道示意图。
每位选手比赛两轮,取最好成绩为该选手行驶成绩。
1、跑道上黑色轨迹净宽1.5—2.0cm。
包含直行、大小左右弯,从55分开始,分段依次到达100分(满分区),经满分区后未能自动停车的,就进入减分区,减分区的分值依次为95、90和80分,依次逐减。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“美丽大连”循迹比赛比赛规则
一、竞赛主题
大连是中国著名的避暑胜地和旅游热点城市,依山傍海,气候宜人,环境优美,是中国首批“优秀旅游城市”,不仅有丰富的中国近
以美丽大连为主题,一起来欣赏大连美丽的风光。
二、竞赛场地及任务
1、赛场规格
竞赛场地的外尺寸是2000mm×2000mm,场地上贴有一条 1.5—2.5cm宽的黑色轨迹线,每个模块的大小是500mm×500mm。
整个场地由起始点、直线、折线、圆弧、虚线、斜坡、断路等组成。
2、赛场环境
机器人比赛场地环境为冷光源、低照度、无磁场干扰。
但由于一般赛场环境的不确定因素较多,例如,场地表面可能有纹路和不平整,光照条件有变化等等。
参赛队在设计机器人时应考虑各种应对措施。
3、比赛任务
参赛队由二名队员组成,创意设计制作一套编程机器人。
要求机器人从起点出发,沿黑线行走,到达终点结束。
1—16号模块对应大连市16个地名或景点,分别是:机场、老虎滩、棒棰岛、滨海路、森林动物园、星海广场、自然博物馆、旅顺、金石滩、星海公园、中山广场、人民广场、大连港、星海公园、大黑
山、冰峪沟等。
下图为比赛场地范例,实际比赛场地的轨迹图形、摆放位置及各区域的色彩搭配将由组委会在赛前确定。
三、竞赛规则
1、机器人要求
(1)机器人的创意、设计、制作与程序设计应由学生独立完成。
体积大小的设计不得超过高20厘米,长宽不得超出起始区域大小。
(2)比赛时所有任务的完成均由预先编写的程序执行,不可使用任何形式的遥控装置。
(3)机器人生产厂家、型号不限,但每个机器人所用的马达数
量不能超过4个,其它结构件,数量不限。
机器人的控制器、马达、传感器必须是独立的模块,允许使用寻迹板。
(4)机器人编程语言和方法不限;
(5)电池自备,不可采用外部电缆输电,为了安全,所有电源电压不得超过12V;
(6)在机器人显著部位应标明参赛队的名称。
2、比赛过程
(1)比赛按照小学、初中、2个组别分别进行比赛。
(2)每个队进行2轮比赛,记取最好的一次成绩作为最终比赛成绩。
(3)每轮比赛时间为1分钟,超过时间而没有结束的,按已经完成模块多少计分。
(4)比赛开始前,机器人需摆放在起始区域,其任何部位不得超出起点;
(5)准备就绪后,队员应举手示意请求比赛开始。
裁判员确认参赛队已准备好后,将发出“3、2、1,开始”的倒计数启动口令。
听到开始后,队员可以启动机器人。
(6)机器人在行进过程中,必须沿着黑色轨迹线前进,不能脱离黑线,否则视为犯规。
是否脱离黑线的标准是“机器人的整体是否离开黑线,位于黑线的一侧”。
(7)比赛中如果出现意外或故障,队员在征求裁判同意后可将机器人拿至场外修整,修整完成后必须放置起点继续比赛,修整期间,
正常计时;
(8)比赛进行过程中,队员不准触碰机器人及场地内物品,否则视为犯规。
裁判允许修理的情况除外。
(9)每轮比赛以机器人由起点出发完成任务到达终点为一轮比赛;
(10)到达终点后,机器人应保持在停止状态直到比赛结束。
每节省1秒钟时间,总分加1分。
(11)每次出现犯规情况必须回到起点重新比赛,并每次在该轮成绩中扣掉10分,犯规前已经完成的任务计分有效。
每轮比赛重新比赛的机会有一次。
重新比赛期间,不重新计时,按原来时间继续计时。
(12)参赛队必须服从裁判判罚,有疑问可向组委会申请仲裁。
不服从裁判,扰乱赛场秩序,视其情节可给予扣分、扣除单轮比赛成绩或取消比赛资格的处罚。
三、计分方法
智能寻迹机器人比赛记分表(范例)
参赛队:组別:
注:表中不得留有空白,无数据的空格必须用“/”划掉。
最后得分如果出现相同的情况,机器人重量轻的参赛队获胜。
裁判员签字:
参赛队员签字:。