PWM型逆变器死区问题的解决
PWM电压型变频器死区效应理论分析和补偿策略及仿真

PWM电压型变频器死区效应理论分析和补偿策略及仿真一、本文概述Overview of this article随着电力电子技术的快速发展,PWM(脉冲宽度调制)电压型变频器在工业控制领域的应用越来越广泛。
然而,在实际应用中,PWM电压型变频器常常面临死区效应的问题,这不仅影响了变频器的控制精度,还可能引发系统的不稳定。
因此,对PWM电压型变频器的死区效应进行深入的理论分析,并探索有效的补偿策略,对于提高变频器的性能具有重要的理论价值和实际应用意义。
With the rapid development of power electronics technology, the application of PWM (pulse width modulation) voltage source inverters in the field of industrial control is becoming increasingly widespread. However, in practical applications, PWM voltage type inverters often face the problem of dead zone effect, which not only affects the control accuracy of the inverter, but also may cause system instability. Therefore, conducting in-depth theoretical analysis on the dead zoneeffect of PWM voltage type inverters and exploring effective compensation strategies have important theoretical value and practical application significance for improving the performance of inverters.本文首先介绍了PWM电压型变频器的基本原理和死区效应的产生原因,分析了死区效应对变频器性能的影响。
单相SPWM逆变器的死区效应分析和补偿策略_李剑
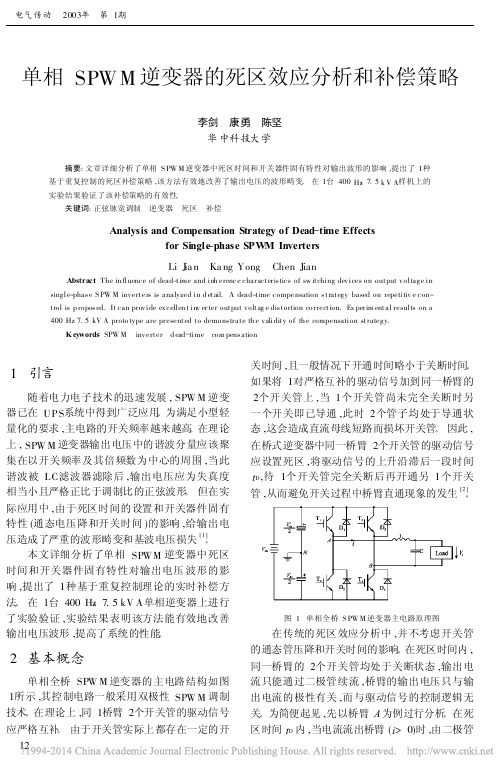
图 4 2种常用的死区补偿方法
在传统的死区分析中 , 误差电压是仅与输出 电流的极性相关且幅值恒定的正负方波。 如果没 有检测误差 , 这 2种开环补偿方案都能够对死区 效应实现精确补偿 , 但实际情况并不是这样 [3 ]。考 虑到开关管的通态管压降和开关时间的影响 , 以 IGBT 为例 , 设开通时间为 ton (包括开通延迟时间 和电流上升时间 ) , 关断时间为 toff (包括存储时间 和电流下降时间 ) , IGBT 的导通压降为 V sat , 二极 管的导通压降为 V d。以电流 i 流出桥臂为正方向 , 在 1个开关周期内取平均值进行分析 。 1)当电流 i> 0时 , 若 D 2 导通 , V dc V AN 1= - 2 - V d 若 T1 导通 , 14
V AN2= 如图 5g 所示 , V AN =
V dc - V sat 2
1 { (Δt+ tD+ ton - toff ) V AN1+ TC [ T C - (Δt+ tD+ ton - toff ) ]V AN2 }
V dc V dc * 1 V AN = T C Δt ( )+ ( T C - Δt ) 2 2 ∴ V e = V AN - V AN tD - ( toff - ton ) = - [ ( V dc + V d - V sat ) + TC * V d+ V sat V + ( s at - V d ) ] 2 V dc V
2 基本概念
单相全桥 SPW M 逆变器的主电路结构如图 1所示 ,其控制电路一般采用双极性 SPW M 调制 技术 。在理论上 ,同 1桥臂 2个开关管的驱动信号 应严格互补。 由于开关管实际上都存在一定的开 12
在线自适应PWM死区消除方法
2 死区效应分析
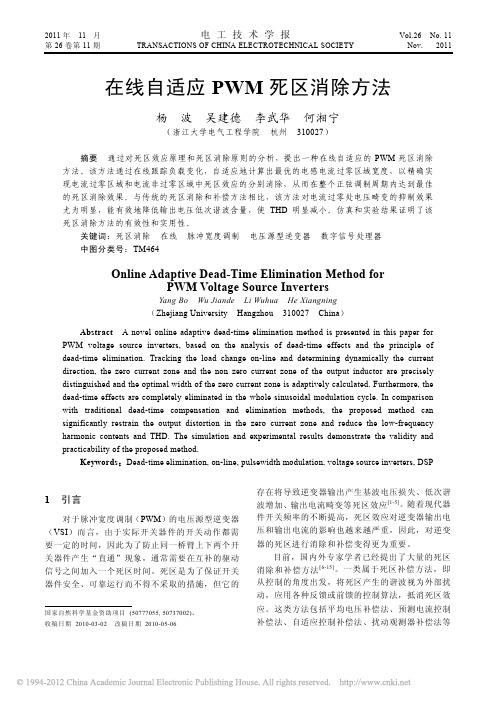
图 1 是电压源型逆变器单桥臂的结构示意图, 其中图 1a 和图 1b 分别表示电感电流不同方向时桥 臂内功率器件的导通情况。当 iL>0 时,SP 开通,
(a)iL>0
(b)iL<0
图 1 电压源型逆变器单桥臂结构示意图
Fig.1 Single phase-leg configuration of VSIs
国家自然科学基金资助项目 (50777055, 50737002)。 收稿日期 2010-03-02 改稿日期 2010-05-06
存在将导致逆变器输出产生基波电压损失、低次谐 波增加、输出电流畸变等死区效应[1-5]。随着现代器 件开关频率的不断提高,死区效应对逆变器输出电 压和输出电流的影响也越来越严重,因此,对逆变 器的死区进行消除和补偿变得更为重要。
间为宽度,母线电压为幅值的负值周期性脉冲电压;
同理,在 iL<0 区域,死区效应注入的是相应的正 值周期性脉冲电压;而在 iL 过零区域,由于正负相 消,没有死区效应的产生。根据高频小纹波近似理
论,在一个正弦调制周期 T 内的平均死区电压<Ud>
的波形如图 3 所示,幅值大小为
Udm = fsTdUdc
3.1 电流非过零区域死区消除原则 由图 1 分析可知,当 iL>0 时,无论开关器件
的驱动信号如何,电流只流过开关管 SP 或二极管 VDN,而开关管 SN 和二极管 VDP 绝不会有电流通 过,因此将 SP 和 VDN 称为在 iL>0 阶段的有效器件, SN 和 VDP 称为无效器件;同理,在 iL<0 阶段,SN 和 VDP 成为流通电流的有效器件,SP 和 VDN 为无 效器件。显然,在电流非过零区域,同一桥臂内导 通电流的有效器件只可能是一个全控型的开关管和 一个不控型的二极管,因此,只要屏蔽相应阶段无 效开关管的驱动信号,则死区可以被完全消除,进 而有效地减小了输出电压基波损失和低次谐波含 量。 3.2 电流过零区域死区消除原则
SPWM中电流反馈对死区影响的补偿

SPWM 中电流反馈对死区影响的补偿
对于SPWM 来说,死区影响并非一种负面的状态,其能够有效的避免桥臂开关管在同时导通时发生的故障。
但这并非意味着死区时间对于SPWM 是完全有利的,死区时间有时会引起反馈二极管的续流,此时便会造成一些不必要的错误,本文就将为大家介绍SPWM 逆变器死区时的电流反馈型补偿。
当死区引起反馈二极管的续流时,使输出电压基波幅值减小,并产生出与死区时间△t 及载波比N 成比例的3、5、7…次谐波,这是设置死区带来的缺点。
这个缺点对变频调速系统的影响最为显着。
特别是在电机低速运行时,调制波角频率ωs减小,使载波比N 相对增大,因此,死区△t 中二极管续流引起的基波幅值减小,和3、5、7…次谐波的增大更加严重。
在这种情况下,为了保证系统的正常运行,就必须对死区中二极管续流的这种不良影响进行补偿。
常用的最基本补偿方法有两种:一种是电流反馈型补偿,另一种是电压反馈型补偿。
它们的共同补偿原理就是设法产生一个与二极管续流引起的误差电压波形相似、相位相差180°的补偿电压ucom,来抵消或减弱误差波的影响。
所谓误差波,就是由反馈二极管续流而引起的误差电压。
三相半桥式SPWM 逆变器电路图见图1。
下面就来说一说电流反馈型补偿的方法。
图1
电流反馈型补偿
死区设置方式有两种,即双边对称设置和单边不对称设置。
现以双边对称设置方式为例来进行说明,其结果对单边不对称设置方式也同样适用。
带死区的SPWM 逆变器在感性负载时,基波幅值的减小与3、5、7…次谐。
PWM型逆变器死区问题的解决

电源技术 < 2008年5月20■<阿城继电器股份有限公司电源公司 李文全引言PWM 电压型逆变器广泛地应用于交流变速传动系统和不停电电源中。
逆变器的输出电压波形的质量尤为重要。
理想的电压波形通常为纯正的正弦波,但实际上在输出级存在着是输出波形畸变的固有源,因而输出波形存在较大的畸变。
其中一个重要的畸变根源是同一桥臂上、下两个器件在开关过程中必有一个死区时间,以防止桥臂直接短路。
另外一些根源如开关器件的导通压降、开关时间等。
每个PWM 调制周期内引起的微小畸变经积累后,会引起输出电压波形较大的畸变,降低基波幅值,改变低次谐波含量,曾加电机的谐波损耗。
因此必须对逆变器的死区问题进行补偿。
在死区期间,逆变器输出的电压不受逻辑信号控制,而是有输出电流的极性确定,通过反馈二极管嵌位在直流回路的正侧或负侧。
因此电流极性的检测是死区补偿的关键技术。
本文对死区时间引起的逆变器输出电压畸变进行了详细分析,给出了电流极性检测方法和死区效应的电压补偿方法。
1 PWM逆变器死区效应的分析不失一般性,以逆变器其中的一个桥臂A 相为例(如图1)。
在死区期间,上、下两个功率器件均不导通,只有一个二极管导通续流。
若电流流向负载,则下面的二极管导通;反之,上面的二极管导通。
控制信号与电压波形如图2所示。
对于i>0(流向负载)而言,如图2(a )、(b )、(d)所示。
当A -信号在T 1时刻关断,延时死区时间T d 后,A +变为高电平(图2d );在T 2时刻A +变为低电平,延时T d 后A -变为高电平(图2b ),此时电压U AN 时电压U AN 经过开关管的关断时间t off 后变为低电平(图2d )。
因而U AN 为高值的实际时间是T 2 –T 1 +T off –T on –T d ,标准时间应为T 2 –T 1,因而,死区时间和开关管共同引起的导通时间误差为T err = T off –T on –T d (1)同理,当时 i<0时,由图2(a 、b 、c )可得时间误差为T err = -(T off –T on –T d ) (2)因此误差时间为T err= sign(i)(T off–T on –T d ) (3)其中sign(i)=PWM型逆变器死区问题的解决摘要:本文对PWM电压型逆变器的死区问题提出了一种实时补偿方法,设计了电流瞬时值过零点的检测方法,该方法简单易行,可适用于变压变频调速系统中。
PWM逆变器死区影响的几种补偿方法

PWM 逆变器死区影响的几种补偿方法摘要:分析逆变器死区对输出电压的影响以及几种常用的补偿方法。
关键词:死区 补偿 逆变器 脉宽调制1 1 引言引言引言 死区可以避免因桥臂开关管同时导通的故障,但死区同时也引起反馈二极管的续流,使输出电压基波幅值减小,并产生出与死区时间△t 及载波比N 成比例的3、5、7…次谐波,这是设置死区带来的缺点。
这个缺点对变频调速系统的影响最为显著。
特别是在电机低速运行时,调制波角频率ωs 减小,使载波比N 相对增大,因此,死区△t 中二极管续流引起的基波幅值减小,和3、5、7…次谐波的增大更加严重。
在这种情况下,为了保证系统的正常运行,就必须对死区中二极管续流的这种不良影响进行补偿。
常用的最基本补偿方法有两种:一种是电流反馈型补偿,另一种是电压反馈型补偿。
它们的共同补偿原理就是设法产生一个与二极管续流引起的误差电压波形相似、相位相差180°的补偿电压ucom,来抵消或减弱误差波的影响。
所谓误差波,就是由反馈二极管续流而引起的误差电压。
三相半桥式SPWM 逆变器电路图见图1。
2 2 电流反馈型补偿电流反馈型补偿电流反馈型补偿 死区设置方式有两种,即双边对称设置和单边不对称设置。
现以双边对称设置方式为例来进行说明,其结果对单边不对称设置方式也同样适用。
带死区的SPWM 逆变器在感性负载时,基波幅值的减小与3、5、7…次谐波幅值的增大都与Δtωc=ΔtNωs 成正比(ωc 为SPWM 中三角波电压的角频率),随着死区时间△t 及载波比N 的增加,输出电压基波幅值将减小,3、5、7…次谐波幅值将比例增大。
当ωs 减小N 相对增大时,这种影响进一步加剧。
为了保证逆变器的正常运行,就必须消除这种不良影响。
加入补偿电路就能很好地达到这个目的。
采用电流反馈型的补偿电路如图2所示。
通过检测逆变器的三相输出电流,并把它变成三相方波电压分别加到各自的调制波us 上,例如将检测到的A 相电流iA,变成方波电压ui 加到A 相调制波us 上,方波电压ui 使逆变器产生一个与电流iA 相位相同,与误差波uD1.4波形相似,但与uD1.4相位相反的补偿电压ucom,如图3所示。
逆变器脉宽调制中基于脉冲的死区补偿方法

逆变器脉宽调制中基于脉冲的死区补偿方法
杨燕波;吴庆彪
【期刊名称】《电力电子技术》
【年(卷),期】2009(43)3
【摘要】逆变器PWM波形中由于死区时间的存在可能会导致电力电子器件的短路,最终影响输出波形并降低可靠性.虽然每一个死区时间都很短.但如果按周期计算的话,叠加起来的死区会对输出的PWM波形产生很大影响.提出了一种修正死区时间的方法,即基于脉冲的死区补偿方法(PBDTC).与其他方法相比,该方法需要的硬件和软件比较少,且成奉较低.该方法在分析单个脉冲死区时间的基础上,对每个单脉冲进行修正.将实验结果与其他方法进行了比较.证明该补偿方法较为完美.
【总页数】3页(P70-72)
【作者】杨燕波;吴庆彪
【作者单位】东华大学,上海,201620;东华大学,上海,201620
【正文语种】中文
【中图分类】TM464
【相关文献】
1.单相特定谐波消除脉宽调制高频逆变器的r死区补偿策略 [J], 罗辞勇;王英豪;王卫耀;南航;魏欣欣
2.基于脉冲调整的四桥臂逆变器死区补偿策略 [J], 周娟;陈映;唐慧英;魏琛;吴璇
3.用于脉宽调制逆变器的死区补偿方法 [J], 刘海舰;高艳霞;李南
4.基于空间矢量脉宽调制的死区补偿方法研究 [J], 陈令云
5.一种新颖的同时考虑中点电位平衡和窄脉冲消除及死区补偿的三电平空间电压矢量脉宽调制方法(英文) [J], 金舜;钟彦儒
因版权原因,仅展示原文概要,查看原文内容请购买。
PWM“死区”的概念和基本原理

PWM“死区”的概念和基本原理PWM(Pulse Width Modulation,脉宽调制)可以用于控制电机、灯光等设备的亮度和运动速度。
在PWM控制中,通常会引入“死区”(Dead Zone)的概念,以确保对控制信号进行适当的滤波,避免意外的电流、电压突变,保护电路元件。
死区的基本原理是通过在PWM周期的过渡阶段,在两个电平(高电平和低电平)之间引入一个“死区时间”,即两个相邻的PWM信号之间的时间间隔。
在死区时间内,PWM信号停止输出电平,保持在低电平或高电平,直到死区时间结束。
死区时间的引入可以减少由于两个不同电平信号之间的切换速度过快而产生的电流和电压突变。
常见的死区时间选择一般为几十纳秒到几微秒。
也可以在硬件或者软件上进行设置调整。
死区的作用主要有以下几个方面:1.限制电流突变:当PWM信号由高变为低或由低变为高时,如果没有死区时间,信号突然切换可能会导致电流的突变,进而将对电路产生过大的负荷。
引入死区时间可以在过渡阶段平滑地切换信号,减少电流突变,保护电路。
2.防止短路故障:在一些特殊情况下,控制信号的切换可能会导致短路,例如在对有源二极管作反向恢复时,如果没有死区时间,可能会导致交流信号直接通过二极管而短路。
通过引入一个死区时间,确保高电平和低电平之间没有交叉时间,可以避免短路故障的发生。
3.提高输出精度:由于器件的响应时间存在一定的延迟,因此在两个相邻信号切换的过渡阶段,输出信号可能会出现瞬时的不稳定情况。
通过引入死区时间,可以提高输出信号的精度,使其更加稳定。
从实际应用的角度来看,死区时间的选择应根据具体的场景进行调整。
过大的死区时间可能会导致输出信号的精度降低,而过小的死区时间则可能会增加电路中的电流突变和短路故障的风险。
总结起来,死区的概念和基本原理是在PWM控制中引入一个时间间隔,在PWM信号的过渡阶段将信号保持在一个不变的电平。
这样可以限制电流和电压的突变,避免意外的负荷和短路故障,提高输出信号的精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电源技术 < 2008年5月
20
■<阿城继电器股份有限公司电源公司 李文全
引言
PWM 电压型逆变器广泛地应用于交流变速传动系统和不停电电源中。
逆变器的输出电压波形的质量尤为重要。
理想的电压波形通常为纯正的正弦波,但实际上在输出级存在着是输出波形畸变的固有源,因而输出波形存在较大的畸变。
其中一个重要的畸变根源是同一桥臂上、下两个器件在开关过程中必有一个死区时间,以防止桥臂直接短路。
另外一些根源如开关器件的导通压降、开关时间等。
每个PWM 调制周期内引起的微小畸变经积累后,会引起输出电压波形较大的畸变,降低基波幅值,改变低次谐波含量,曾加电机的谐波损耗。
因此必须对逆变器的死区问题进行补偿。
在死区期间,逆变器输出的电压不受逻辑信号控制,而是有输出电流的极性确定,通过反馈二极管嵌位在直流回路的正侧或负侧。
因此电流极性的检测是死区补偿的关键技术。
本文对死区时间引起的逆变器输出电压畸变进行了详细分析,给出了电流极性检测方法和死区效应的电压补偿方法。
1 PWM逆变器死区效应的分析
不失一般性,以逆变器其中的一个桥臂A 相为例(如图
1)。
在死区期间,上、下两个功率器件均不导通,只有一个二极管导通续流。
若电流流向负载,则下面的二极管导通;反之,上面的二极管导通。
控制信号与电压波形如图2所示。
对于i>0(流向负载)而言,如图2(a )、(b )、(d)所示。
当A -信号在T 1时刻关断,延时死区时间T d 后,A +变为高电平(图2d );在T 2时刻A +变为低电平,延时T d 后A -变为高电
平(图2b ),此时电压U AN 时电压U AN 经过开关管的关断时间t off 后变为低电平(图2d )。
因而U AN 为高值的实际时间是T 2 –T 1 +T off –T on –T d ,标准时间应为T 2 –T 1,因而,死区时间和开关管共同引起的导通时间误差为
T err = T off –T on –T d (1)同理,当时 i<0时,由图2(a 、b 、c )可得时间误差为
T err = -(T off –T on –T d ) (2)因此误差时间为T err
= sign(i)(T off
–T on –T d ) (3)
其中sign(i)=
PWM型逆变器死区问题的解决
摘要:本文对PWM电压型逆变器的死区问题提出了一种实时补偿方法,设计了电流瞬时值过零点的检测方法,该方法简单易行,可适用于变压变频调速系统中。
关键词: PWM逆变器 电流检测 死区补偿
图1 逆变器桥臂
图2 PWM逆变器控制信号与输出电压波形
电源技术 < 2008年5月
21
图4 电流测量与计算
由式(3)、(4)可知,当i>0时,电压将减少ΔV ,当i<0时,电压将增加ΔV 。
若输出理想电压为V o ,则实际电压输出值为
U AN = V 0-Δv sign ( i ) (5)考虑到开关导通压降,由图2可以推出,在一个调制周期内电压误差为
式中V ce 为功率开关管导通压降;V d 为续流二极管导通压降;V dc 为直流电压;
(T 2 –T 1)为PWM 调制周期。
(V ce -V d )与V dc 相比很小,因此上式第2项可忽略,则有
由式(5)不难得出
V 0= U AN +Δvsign(i) (8)即当i>0时,将电压实际值加上电压误差值ΔV ,即可得电压理想值。
当i<0时,将电压实际值减去电压误差值ΔV ,即可得电压理想值。
因此确定电压误差值ΔV 和电流极性是实现死区效应补偿的必要手段。
2 死区效应的补偿
2.1电压误差的确定
由式(7)可知,ΔV 包括若干个与负载电流有关的量,若要逐项实现在线测量,难度很大,因为t on 和t off 随着电流的增大而同时增加,因此t on - t off 可确认为常数。
但V ce 和V d 随着电流的变化而变化,根据功率器件的工作原理可得:
V cr =v ceo +r ce |i |
V d =V do +r d |i | (9)其中V coo 、 V do 分别为功率管和二极管的阀值,为恒定量;r ce 、r d 分别为功率管和二极管的动态电阻,与负载电流有关。
因此式(7)变为
其中ΔV 0为功率器件的恒定阀值引起的电压误差,因此是恒值;ΔV C 为不同负载电流下的电压误差矫正值,是变化
量。
因此,可以预先测定好不同电流时的ΔV C 值,以表格的形式存储于RAM 中,根据不同的负载电流值以查表的方式确定电压总误差ΔV 。
2.2 电流极性的测定
由于电流瞬态值的过零点存在PWM 噪声和其他干扰现象,要准确地实现电流极性的在线测定困难较大。
若采用坐
标变换的方法,将相电流瞬时值变换为同步坐标系下d-q 分量,然后分别乘以sin ωt 和cos ωt,经三角运算后可得:
其中i a 为A 相电流幅值,Φ为负载阻抗角。
首先利用低通滤波器将高次谐波滤除,然后对低通滤波引起的相位移进行适当的补偿,在利用陷波滤波器,调谐成2倍谐波,将上式的2倍频项电流滤除,其框图如图3所示。
它
由两个积分器和一个比例放大器组成,积分常数分别为K 1和K 2不可调,比例系数K p 可调,另有两个电位器RP 1 和RP 2。
输入信号I 为滤除高次谐波的d 、q 轴电流,输出为滤除二次谐波后的电流。
此滤波环节的传递函数为
其中α、Z 为电位器RP 1 和RP 2调整后的对地端的刻度系数。
陷波频率为 (13)滤波衰减大小由电位器RP 1 和RP 2决定,Z 值越小,衰减越大。
调整电位器RP 1 改变α,使ω1等于2ω,这样既可将2倍频电流滤除。
图3 陷波滤波器。