桁架机器人关键部件结构优化设计
机器人机构设计与优化
机器人机构设计与优化一、引言随着科技的飞速发展,机器人已经成为现代社会中不可或缺的一部分。
机器人的广泛应用涵盖了各个领域,包括工业生产、医疗护理、农业种植等。
机器人的工作效率和准确性对于提高生产力和人类生活质量具有重要意义。
而机器人的机构设计与优化是实现高效工作的关键。
二、机器人机构设计的原则机器人机构设计的目标是根据特定的任务需求,设计出适合的机械结构。
在机构设计时需要考虑以下原则:1. 功能性:机器人的机构必须能够完成其预定的工作任务。
设计师需要根据任务需求确定机器人所需要的动作范围、工作速度和负载能力等参数。
例如,在工业生产领域中,机器人需要能够快速准确地操作和搬运物体。
2. 稳定性:机器人工作时应保持良好的稳定性以避免不必要的震动和摆动。
稳定性可以通过合理选择机械结构和电子控制系统来实现。
例如,在机器人的关节处使用稳定的轴承可以提高机器人的稳定性。
3. 灵活性:机器人需要具备较高的灵活性以应对不同的工作环境和任务需求。
机器人的机构设计应尽量简化,以便于自由度的变换。
例如,在农业领域中,机器人需要具备适应不同地形和作业需求的能力。
4. 可靠性:机器人的机构应该能够在长期的工作中保持稳定可靠的性能。
设计时应考虑机械结构的强度和使用材料的耐久性。
例如,在医疗护理领域中,机器人的机构需要具备适应各种碰撞和压力的能力。
5. 经济性:机器人的机构设计还应考虑成本和效益的平衡。
设计师需要在提高机器人性能的同时,考虑到成本控制。
例如,在工业生产中,要尽可能减少机器人的制造成本以提高经济效益。
三、机器人机构设计的方法机器人机构设计的方法主要包括传统设计方法和优化设计方法。
1. 传统设计方法:传统的机器人机构设计方法是基于经验和直觉进行的。
设计师根据自己的知识和经验,选择合适的机械结构和参数。
这种方法适用于简单的机构设计,但在复杂问题上存在一定局限性。
2. 优化设计方法:优化设计方法是利用数学模型和计算机仿真来实现机器人机构设计的最佳化。
桁架机械手结构和设计分析

桁架机械手结构和设计分析桁架机械手是一种利用桁架结构设计的机械手臂,具有轻量化、高强度和高稳定性的特点,被广泛应用于工业机器人、航空航天、汽车制造等领域。
在本文中,我们将对桁架机械手的结构和设计进行分析,探讨其优点和应用前景。
一、桁架机械手结构分析1. 桁架结构桁架结构是由多个横竖交错的杆件和节点连接构成的空间结构,能够承受较大的受力,并且具有较高的刚度和稳定性。
采用桁架结构设计的机械手臂能够具有较高的承载能力和较好的运动稳定性。
2. 关节连接桁架机械手的关节连接采用智能化设计,可以实现多自由度的运动,并且具有较大的工作空间。
关节连接的结构设计也决定了机械手的精度和灵活性,因此需要进行精细的设计和优化。
3. 轨迹规划桁架机械手的轨迹规划采用先进的控制算法和传感器技术,可以实现高精度、高速度的运动控制,并且能够适应复杂的工作环境和任务需求。
桁架机械手在实际生产中具有较大的应用前景。
1. 轻量化设计桁架机械手的设计采用轻量化材料和结构设计,能够实现机械手的轻盈、高强度和高稳定性。
轻量化设计也能够减小机械手的能耗和成本,提高其工作效率和经济性。
2. 结构优化3. 控制系统三、桁架机械手的应用前景1. 工业机器人2. 航空航天桁架机械手在航空航天领域具有较大的应用前景,能够实现飞机部件的装配和维护工作,提高生产效率和质量。
桁架机械手也能够适应复杂的空间环境和任务需求,因此具有较大的市场潜力。
3. 汽车制造桁架机械手具有较高的优点和应用前景,能够满足复杂生产环境和任务需求,因此在工业自动化领域具有较大的市场需求和发展空间。
相信随着科技的不断进步和创新,桁架机械手将会在未来的工业自动化中发挥越来越重要的作用。
模块化桁架机构动力源的设计和优化方法

———————————————收稿日期:2021-05-06基金项目:国家重点研发计划(2020YFB2007600)模块化桁架机构动力源的设计和优化方法李志勇1,林秋红2,盆洪民*,1,曹子振1(1.天津航天机电设备研究所,天津 300458;2.北京空间飞行器总体设计部,北京 100094) 摘要:模块化桁架机构其动力源系统由于需兼顾多自由度、最简原则、可扩展性和空间环境,需要在应用中进行优化设计。
本文针对一种模块化的多自由度空间可展开桁架机构,分析了模块化机构特性,包括单模块机构自由度和多模块机构组合特性,具体介绍了动力源的设计过程和优化方法,基于动力学虚拟样机技术进行了有源动力源与无源动力源的参数匹配性优化设计,提高了模块化机构的展开动力学特性和稳定性,降低了对主动动力源的功率需求。
关键词:模块化;展开机构;动力学仿真;动力源 中图分类号:V211.3 文献标志码:Adoi :10.3969/j.issn.1006-0316.2022.02.008文章编号:1006-0316 (2022) 02-0054-07Optimization Design of the Power Source for Modular Truss MechanismLI Zhiyong 1,LIN Qiuhong 2,PEN Hongmin 1,CAO Zizhen 1( 1.Tianjin Institute of Aerospace Mechanical and Electrical Equipment, Tianjin 300458, China;2.Beijing Institute of Spacecraft System Engineering, Beijing 100094, China )Abstract :Power source system of modular truss mechanism needs to be optimized in application for catering its multi-degree of freedom, minimalist principle, scalability, and space environment requirements. In this paper, the design process and optimization method of power source for a modular deployable truss mechanism with multi-degree of freedom is introduced. Based on dynamic virtual prototype technique, the optimization design of active power source and passive power source for acquiring matched parameters is performed. The results show that proposed method can improve the deployable dynamic characteristics and stability of modular mechanism and reduce the power demand of active power source.Key words :modular ;deployable mechanism ;dynamics simulation ;power source随着卫星SAR (Synthetic Aperture Radar ,合成孔径雷达)天线口径的日益增大,平面天线展开机构的规模和复杂程度也迅速提高,模块化桁架机构以其单一构型、大收纳比、良好可扩展性和高集成效率成为大型空间展开机构的热点[1-3],而模块化机构展开动力源的设计由于存在多自由度、系统柔性大引起模块间动力传递延迟等问题成为研究难点之一[4]。
桁架结构优化设计
桁架结构优化设计一般所谓的优化,是指从完成某一任务所有可能方案中按某种标准寻找最佳方案。
结构优化设计的基本思想是,使所设计的结构或构件不仅满足强度、刚度与稳定性等方面的要求,同时又在追求某种或某些目标方面(质量最轻,承载最高,价格最低,体积最小)达到最佳程度。
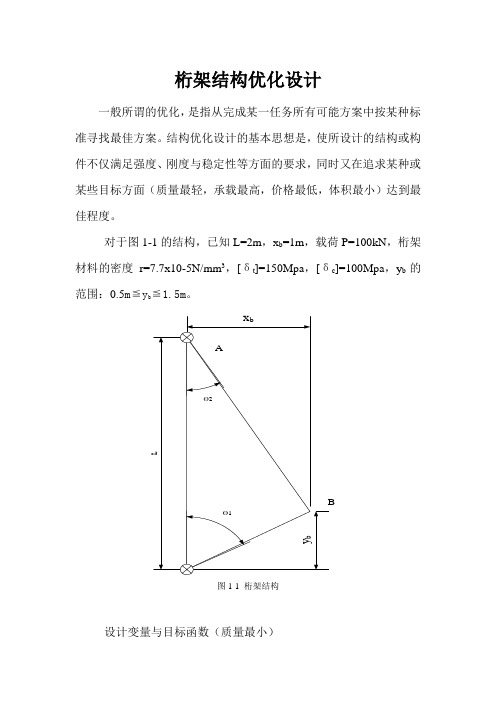
对于图1-1的结构,已知L=2m,x b=1m,载荷P=100kN,桁架材料的密度r=7.7x10-5N/mm3,[δt]=150Mpa,[δc]=100Mpa,y b的范围:0.5m≦y b≦1.5m。
图1-1 桁架结构设计变量与目标函数(质量最小)预定参数(设计中已确定,设计者不能任意修改的量):L , x b ,P ,r ,[δt ] ,[δc ]设计变量(可由设计者调整的量)y b ,A 1,A 2 约束条件(对设计变量的约束条件) (1) 强度条件约束(截面、杆件的强度) (2) 几何条件约束(B 点的高度范围) 目标函数:桁架的质量W (最小)解:1. 应力分析0sin sin 02112=--=∑θθN N F x0cos cos 02112=---=∑P N N Fyθθ由此得:)sin(sin 2111θθθ+=p N )sin(sin 2122θθθ+-=p N由正弦定理得:ly l x pN B B 21)(2-+=ly x pN BB 222+=由此得杆1和2横截面上的正应力121)(2lA y l x pB B -+=σ2222lA y x pB B +=σ2.最轻质量设计目标函数(桁架的质量)))((222122B B y x A y l x A W B B ++-+=γ(1-1)约束条件[][]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧≤+≤-+c B t B lA y x p lA y l x p B B σσ221222)( (1-2)0.5≦y b ≦1.5(m ) (1-3) (于是问题归结为:在满足上述约束条件下,确定设计变量y b ,A 1,A 2,使目标函数W 最小。
探讨粒子群优化演算于桁架结构最优化设计
探讨粒子群优化演算于桁架结构最优化设计摘要:本文针对桁架结构系统设计所运用的方法进行探讨,主要研究粒子群优化演算法在桁架最优化设计中的应用,为了改进这种方法的弊端,运用惯性权重、压缩因子、被动聚集因子、粒子群蚁群优化演算法、启发式粒子群优化演算法减少弊端的产生,希望能给以后的设计提供一些理论依据。
关键词:桁架;粒子群优化演算法;最优化设计桁架结构为工程上常见的一种结构系统,其力学分析过程只需要考虑到轴力,因此结构设计过程比其他结构系统简单。
桁架结构最优化通常可分为最佳焊件断面尺寸设计、最佳结构配置、最佳拓璞设计三类,其中又以焊件断面尺寸最佳化最为普遍。
在早期,桁架结构最佳化设计大多利用梯度作为搜寻方向的资讯,对问题极值求解有很好的计算效率。
这种方法的特点在于初始点位,如果初始点位在问题的全域最佳解附近,则可以很快的搜寻到全域最佳解;反之,则会陷入局部最佳解中而无法跳脱。
因此,后来就有许多学者为了改善传统梯度法的这个缺陷,陆续发展处许多不需要依赖梯度资讯的最佳化演算法,比如:基因遗传演算法、模拟退火法、禁忌搜寻演算法、蚁群演算法、粒子群优化演算法、和谐搜寻演算法等。
上述这些新的演算法有一个共同的特点,就是都能在不用梯度资讯的情况下,还能拥有比传统梯度法更好的全域搜寻能力,因此,在无梯度资讯下也能找到比使用传统梯度法更要好的最佳解。
粒子群优化演算法为一门新的、一种具有群体智慧概念的仿生演算法,在问题空间中透过迭代的运算来搜寻全域最佳解,其主要特色在于较少的参数设定及收敛速度快,且具有分散式搜寻、记忆性及容易与其他演算法结合等特点,故粒子群优化演算法极具有求解组合最佳化问题的潜力。
故本文针对桁架结构最佳化设计所运用的最佳化演算方法进行了以下总结,希望能给以后的设计提供一些理论依据。
1原始粒子群优化演算法粒子群优化演算法是由Eberhart和Kenneby于1995年提出的一种具有群体智慧概念的仿生演算法。
桁架机器人几种典型横梁模块的设计概述
桁架机器人几种典型横梁模块的设计概述摘要:为解决长行程桁架机器人设计、安装调试等复杂问题,本文提出一套新型桁架机器人模块化设计安装方法。
利用此方法可以将长行程桁架机器人的X轴组件、立柱组件、地脚组件形成具有通用性的模块;本文主要对上述X轴组件进行模块化设计,可针对长行程桁架机器人进行有效组合拼接,立柱间距可根据设备排布柔性化安装。
经过安装调试,各项指标满足要求,现已大批量应用于实际运行中。
关键词:桁架机器人;模块化设计;X轴模块;长行程;地脚模块1 引言桁架机器人作为机床自动化上下料的标配搭档,在减轻工人劳动强度,改善劳动条件及提高产能方面优势凸显,随着智能制造时代的来临,其将成为智能化、数字化时代的一个重要产物;随之桁架机器人的设计及安装也将追求更加人性化、系统化,标准化。
本文则主要针对X-Z两轴桁架机器人的X轴组件、立柱组件、地脚组件的模块化设计做概述说明。
提供一套方便有效的桁架机器人模块化设计及安装调试方法。
2模块化设计概述说明桁架机器人采用模块化设计,对于X轴横梁可以进行各种长度的拼接,组成多台联机的生产线,柔性大,可改造性强;对于立柱的模块化设计可以通过立柱拼接实现多种高度组合;地脚模块化设计则减轻设计工作量及后期安装问题。
各模块在机械上是相互独立的,也可在一定范围内进行任意组合,可实现安装调试与机床分开进行。
桁架模块化设计要素如下。
2.1行程长度确定在大规模的工业制造生产中,一套自动化程度很高的生产线往往由几个或几十个工序组成,即由非常多的加工及辅助设备组成,桁架机器人经常在其中承担许工序与工序之间的物流转运工作,因此假设在一条有5个工位组成的加工生产线中,其整线长度预计超过28m。
参数假设如下:表1较长行程桁架机器人加工自动线假定参数2.2模块化设计原则经过论证,采用模块化设计可以大大降低长行程的生产线的设计安装难度,原则如下:1)将传动方式确认为齿轮、齿条传动,导轨的设计长度等于齿条的理论长度;2)横梁组件与立柱组件配合时采取可移动机构连接方式,而非固定孔距的连接方式;3)因长行程设计时会对桁架机器人的竖直方向(立柱方向)产生很大的高度差,所以需要设计调整量较大的地脚组件。
机械设计中的结构优化与零部件选型

机械设计中的结构优化与零部件选型机械设计中的结构优化与零部件选型是提高机械产品性能和可靠性的关键环节,本文将从机械结构优化和零部件选型两个方面进行探讨。
一、机械结构优化机械结构优化是指通过改变结构形式、减少零部件数量、提高结构强度等手段,使得机械产品在体积、重量、刚度、热稳定性等方面达到最佳状态。
1. 结构形式优化在机械设计中,常常需要根据产品的功能要求选择最合适的结构形式。
例如,在设计一种移动机器人时,可以选择轮式、履带式或者腿式等不同的结构形式。
通过对机器人工作环境、负载要求以及成本等因素的综合考虑,确定最佳的结构形式是机械结构优化的关键。
2. 零部件数量优化零部件数量的减少可以降低机械产品的制造和维护成本,并提高产品的可靠性。
因此,在机械设计中,需要尽量减少零部件的数量,同时保证机械产品的正常工作。
例如,可以通过零部件的集成化设计,将原本独立的功能模块整合在一起,从而减少零部件数量。
3. 结构强度优化在机械设计中,结构强度是一个非常重要的指标。
通过优化结构形式和改善材料使用,可以提高机械产品的结构强度。
例如,在设计一种汽车底盘时,可以通过优化梁的截面形状、增加梁的数量或者改变梁的材料,使得底盘具有更好的刚度和抗弯能力。
二、零部件选型零部件选型是指在机械设计中选择最合适的零部件以满足产品的功能和性能要求。
选型的过程需要充分考虑产品的工作环境、性能指标和成本等因素。
1. 材料选型材料的选择对于机械产品的性能和可靠性具有重要影响。
不同的材料具有不同的物理、化学性质,因此需要根据产品的使用要求选择最为适合的材料。
例如,在设计一种高温工作的发动机零部件时,需要选择具有高温抗氧化和耐磨损性能的材料。
2. 标准件选型在机械设计中,标准件的使用可以降低成本和提高设计效率。
标准件通常由专门的生产厂家生产,并按照相关的标准进行设计和制造。
因此,选用标准件可以减少设计和制造的工作量,同时保证产品的质量。
例如,设计一种机械结构时可以选用标准型号的轴承、螺栓等零部件。
桁架机械手的结构设计
桁架机械手的结构设计一、引言介绍桁架机械手的定义和应用领域,阐述桁架机械手结构设计的重要性。
二、桁架机械手的基本结构1. 桁架机械手的组成部分:支撑结构、运动机构、末端执行器。
2. 支撑结构:固定在地面上,承受整个系统的重量和力矩,保证系统稳定。
3. 运动机构:由电机、减速器、传动装置等组成,控制桁架机械手在三维空间内的运动。
4. 末端执行器:根据不同应用场景选择不同的执行器,如夹爪、喷嘴等。
三、桁架机械手的运动方式1. 平移运动:通过水平方向上的移动实现物体在平面内的移动。
2. 提升运动:通过垂直方向上移动实现物体在竖直方向上的变化。
3. 回转运动:通过旋转实现物体在水平面内或竖直平面内旋转。
四、桁架机械手关节设计1. 关节类型:旋转关节和直线关节。
2. 关节传动方式:齿轮传动、同步带传动、蜗轮蜗杆传动等。
3. 关节驱动方式:电机驱动、液压驱动、气压驱动等。
五、桁架机械手的控制系统1. 控制系统的组成部分:控制器、编码器、传感器等。
2. 控制系统的工作原理:通过编程实现对机械手的运动控制。
3. 控制系统的分类:开环控制和闭环控制。
六、桁架机械手结构设计中需要考虑的因素1. 负载能力:根据实际应用需求确定负载能力,选择合适的支撑结构和执行器。
2. 运动速度和精度:根据应用场景确定运动速度和精度要求,选择合适的电机和传感器。
3. 系统稳定性:保证整个系统在运行过程中稳定可靠,避免因失稳而导致事故发生。
七、桁架机械手结构设计案例分析以某厂家生产的桁架机械手为例,介绍其具体结构设计方案,包括支撑结构、运动机构、执行器等。
八、桁架机械手结构设计的未来发展趋势1. 智能化:引入人工智能技术,实现自主学习和自主决策。
2. 模块化:将桁架机械手模块化,方便维护和升级。
3. 轻量化:采用新型材料和结构设计,减轻整个系统的重量。
九、结论总结桁架机械手的结构设计要点和发展趋势,强调其在工业生产中的重要作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
123
中国设备
工程
Engineer ing hina C P l ant
中国设备工程 2018.09 (下)桁架机器人作为一种多自由度以及用于各种任务中的自动化设备,不仅可以进行自动化控制、还可以在空间XYZ 直角坐标系基础上进行反复编程。
在桁架式机器人中使传统的物流方式发生了根本性的转变,使其工作运行环境得到了有效地改善,使其机械零部件在生产过程中,实现数字化、信息化以及无人化生产管理,不仅使产品的生产质量得以有效保障,还大大提升了劳动生产率,将工人从繁重的体力劳动中解放出来,使现代制造技术达到一个崭新的水平。
1 桁架机器人整体结构设计
桁架机器人的整体框架为龙门式结构,框架包括立柱、滑台、横梁和竖梁。
具体构造如图1所示。
在桁架机器人的立柱下方有物料输送台,在位于立柱大约70mm 的位置安装安全防护网。
图1显示,在整个桁架机器人中运行期间的主要力量支撑来源于立柱,当横梁和Z 方向工作部件(滑台、竖梁及末端负载)发生重力作用后,其中Z 方向工作部件的重心距离立柱中心距离505mm。
从理论力学知识可以知道,立柱产生的变形不仅与力的大小有关,而且与力到立柱中心的距离有关,此时横梁及Z 轴运动部件的质量会对立柱造成偏心倾覆力矩,造成立柱的变形,而这种变形会在末端执行器上产生放大作用,影响末端运动
精度及整机的稳定性。
因此,为了使桁架机器人的整体刚度得以提升,增加桁架机器人的刚度及稳定性,
需要从以下两方面进行。
(1)缩短横梁上Z 轴运动部件与立柱中心线的距离以减小偏心力矩的大小。
(2)为了提升横梁的坚韧度,通过降低横梁的弯度变形量,减少横梁因为扭转时对尾部精确值的影响,对机器人的横梁采取优化设计。
图1 改进后桁架机器人整体布局示意图
图2 桁架机器人整体布局示意图2 桁架机器人立柱的结构预改进设计
立柱可以保证桁架机器人中构造的稳定,一般采
桁架机器人关键部件结构优化设计
于美森,杜银明
(青岛科捷机器人有限公司,山东 青岛 266100)
摘要:在桁架机器人中前六阶固有频率和伺服电机的激振频率分别是15.9~52.6Hz 和50Hz 以内,其结构构造受到工作运动过程中的影响,发生共振的机率非常大;受到桁架机器人末端执行器运动影响,桁架机器人的结构框架和立柱都会受到一定的变形影响,因此对桁架机器人的结构和立柱进行了优化设计,提高桁架机器人本体结构的固有频率及刚度,进而提升桁架机器人的工作性能及运动精度。
关键词:桁架机器人;关键部件;结构设计
中图分类号:TP242 文献标识码:A 文章编号:1671-0711(2018)09(下)-0123-02
124
研究与探索Research and Exploration ·工艺与技术
中国设备工程 2018.09 (下)
用钢管和钢板焊接而成的,在链接立柱和横梁的位置呈L 型结构,这样不仅可以及时调整横梁的工作面,还可以使位于横梁上的竖梁(Z 轴)的轴线始终垂直于立柱的安装平面,如图1所示。
不过如果利用图中的方法对横梁和z 轴进行链接时,支撑力量主要来源于连接面,这样会引起横梁在偏心力的作用下造成变形。
对其结构进行改进设计时,要特别注意外界干涉,如图1所示,和立柱有70mm 距离的物料输送装置,在考虑安全问题的基础上可以将距离调整为20mm,图2是采取改进设计后的结构图,通过减少横梁及Z 轴运动部件的重心距与立柱中心线的位置,还需要将横梁和立柱链接的位置进行改进设计,利用将接触面积扩大化处理。
从原来的侧面接触改成侧面和底面接触,同时要使用加强筋,提高结合面的强度和刚度。
3 桁架机器人横梁的多目标尺寸优化设计
横梁(Y 轴)是桁架机器人中的结构构造中最关键的一个基本构件,在横梁(Y 轴)中安装着一些导轨和齿轮条,这些导轨运动方向朝向Y 轴,还承受着构造中Z 轴方向的重量以及滑台的作用。
在桁架机器人结构进行优化设计过程中,需要注意的是末端执行器的精准度的设计,其精准度直接受到横梁的坚硬度的影响。
在满足使用标准要求以及生产工艺标准要求的基础上,为了进一步提升桁架机器人的工作性能,对横梁结构进行优化设计。
一般生产横梁所采用的材料为钢管和钢板,钢管采用无缝方形,长度是200×200×10 mm 的方形钢管,数量为两根,总长度是5 m,两个方形钢管通过键进行连接固定。
所使用的方管每个厚度相同,由于承受力与截面的面积相关,因此通过优化设计横梁截面尺寸,减少横梁的扭转变形及Z 向的弯曲变形。
4 桁架机器人结构改进
对桁生机器人横梁结构进行优化设计过程中,建模时所选用的矩形钢管尺寸为250×150×6。
对三维模型的静力进行有限元分析过程中,采用Solidworks Simulation 软件进行,承受力度为20kg 时,图3中所显示的是桁架机器人节点的应力荷载情况,图4所显示的是节点发生变形之后的云图,比较20kg 承受力下的分析结果如表1所示。
通过表1对比结果显示:在经过对桁生机器人的构造进行优化设计之后,其变形量降低在0%~29%之间。
经过优化设计之后,桁生机器人的结构发生变形最大数值和最大应力减小数值具有较为突出的改变,这充分说明,当桁生机器人通过优化设计之后,只在结构上发生了变化,其结构上有较大的优越性,其它方面,如网格
划分的能力一样、材料属性相同、制约力和承受力度都一致。
表1 综合改进前后结果对比序号单元数节点数变形/mm 最大应力/MPa 结构改进前
690901344020.622321结构改进后
73417
142733
0.4426
13.8
5 结语
对桁生机器人的结构进行优化设计效果较好,通过优化设计改造后的桁生机器人,其变形量在20%~29%之间。
桁生机器人在经过结构改造之后,其成本在投入一样的情况下,桁生机器人在性能上更胜一筹,在市场竞争过程中更有影响力和竞争力。
参考文献:
[1]王彪.桁架机器人耦合特性分析与结构优化[D].合肥工业大学,2017.
[2]亚晓丹.桁架式机床上下料机器人分析与改进设计[D].东北大学,2014.
[3]王锴.桁架自动成型及焊接生产线的研制[D].兰州理工大学
,2008.图3 综合改进后巧架机器人节点等效应力分布云图
图4
综合改进后巧架机器人节点变形云图。