实时控制系统的步进电机速度控制器设计
基于单片机的步进电机控制器设计
基于单片机的步进电机控制器设计步进电机是一种可实现精确控制和定位的电动机,广泛应用于机械和自动化领域。
为了更好地控制步进电机,可以设计一个基于单片机的步进电机控制器。
本文将从步进电机的基本原理、常见控制方式、单片机的选择、电路设计和程序编写等方面进行详细介绍,共计超过1200字。
第一部分:步进电机的基本原理步进电机主要由定子和转子组成,通过电磁原理可以实现精确控制和定位。
步进电机根据工作方式的不同分为全步进电机和半步进电机,全步进电机每次步进一个固定的角度,而半步进电机每次步进一个更小的角度。
第二部分:常见的步进电机控制方式步进电机的控制方式有多种,其中最常见的控制方式是脉冲方向控制和脉冲加减速控制。
脉冲方向控制方式通过给步进电机控制信号的脉冲数和方向来实现电机转动,脉冲加减速控制方式则通过改变脉冲的频率和加减速度来控制电机的转速和位置。
第三部分:单片机的选择在设计步进电机控制器时,需要选择适合的单片机来实现控制逻辑和信号的生成。
常见的单片机有51系列、AVR系列、ARM Cortex-M系列等。
选择单片机时需要考虑其运算速度、存储容量、IO口数量等因素,以满足步进电机控制的要求。
第四部分:电路设计步进电机控制器的电路设计包括电机驱动电路和控制电路。
其中电机驱动电路用于提供适当的电流和电压给步进电机,以实现其运转。
可以选择使用电流驱动器芯片或者使用MOSFET等器件设计电路。
控制电路主要包括单片机和其他外围电路,用于生成控制信号和接收输入信号。
第五部分:程序编写步进电机控制器的程序需要实现控制逻辑和信号的生成。
程序可以使用C语言或者汇编语言进行编写,通过单片机的GPIO口和定时器等模块来生成适当的脉冲信号和控制信号,驱动步进电机实现转动和定位。
综上所述,基于单片机的步进电机控制器设计涉及到步进电机的基本原理、常见的控制方式、单片机的选择、电路设计和程序编写等多个方面。
通过合理的设计和实现,可以实现对步进电机的精确控制和定位,为机械和自动化领域的应用提供便利。
步进电机控制器的设计
扪 【
…
鲣 …l i广 几 : 1 . ; : : ni 3 O H : 1: r 门 n n 门: I 鲮 l2 H l n :n n n :门 n . : :n … 0 ; : 广 n l
l M ; 门; 门. 几 几 八 :几 几 : l 1 门 ; : 几 几
l: j
_ 埘 : : : : : .1几 O 。 . . . : ; ] I 几 几 几 几 r : 1
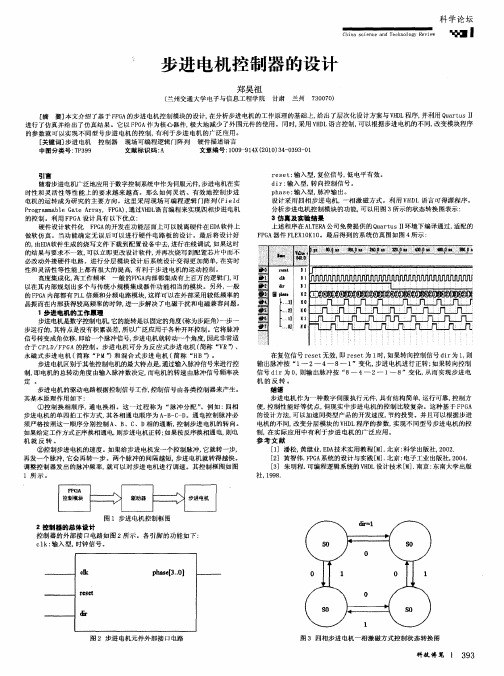
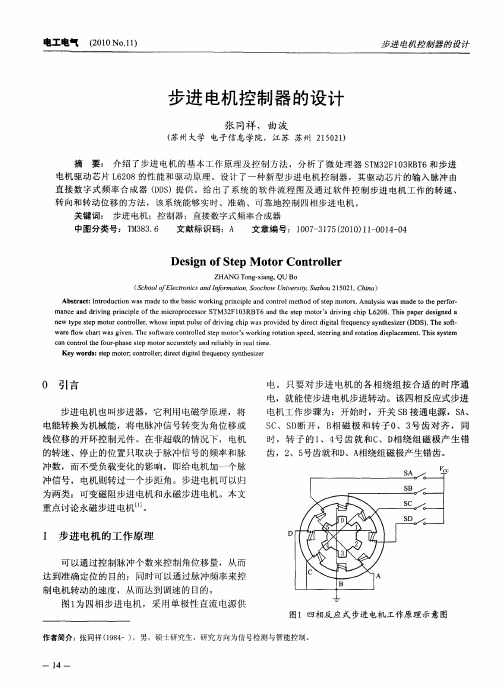
在 复位 信号 r s t e e 无效 , r s t 1 如 果转 向控 制信 号 dr 1 则 即 e e 为 时, i为 , 输 出脉冲 按 “ — 2 4— 8 1 1 — — ”变 化 , 步进 电机 进 行 正转 : 如果 转 向控制 信 号 d r为 0 则 输 出脉 冲按 “ i , 8— 4— 2 1 8”变化 , — — 从而 实现 步进 电
r s t 输入 型, ee : 复位信 号, 电平 有 效 。 低 d r 输入 型 , 向控 制信 号 。 i: 转 p a e 输入 型, hs : 脉冲 输 出 。 设计采 用 四相 步 进 电机, 相激 磁 方式 。利 用 V D 一 H L语 言 可得源 程 序 分 析步进 电机控 制模 块 的功能 , 以用 图 3所示 的状 态转换 图表示 : 可
智能步进电机控制器设计
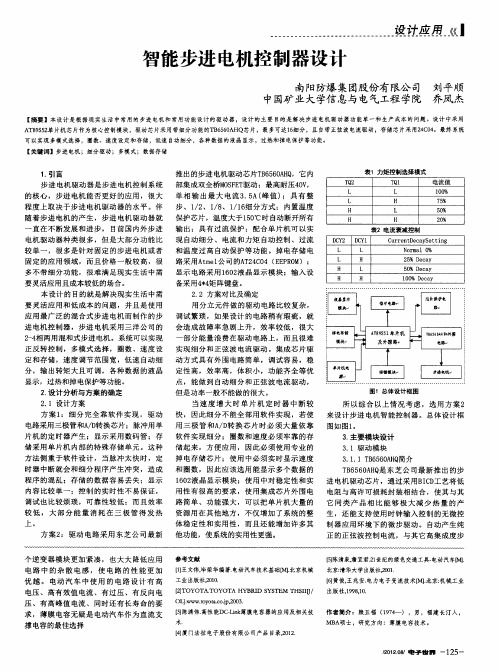
表 1力矩控制选择模式
TQ2
L
TQ1
L
电流 值
1O0%
L
H
75%
H
L
50%
H
H
20%
表 2 电流 衰 减 控 制
电机 驱 动 器种 类 很 多 ,但 是 大 部分 功 能 比 现 自动 细 分 、 电流 和 力矩 自动控 制 、过 流 DCY2 DCY1
片机 的定 时器 产 生 ;显示 采 用数 码 管 :存 软件 实 现细 分 ; 圈数 和速 度 必 须牢 靠 的存 储采 用 单 片机 内部 的特殊 存 储 单元 。 这种 储起 来 ,方 便 应用 ,因此 必 须使 用 专业 的
3.主要 模块设 计 3.1驱 动模块
方法 侧 重 于软 件 设计 ,当脉 冲太 快 时 ,定 时器 中断就 会 和细 分 程序 产 生冲 突 ,造 成 程序 的混 乱 ;存储 的数据 容 易 丢失 ; 显示 内容 比较 单一 ;控 制 的 实时 性不 易保证 , 调试 也 比较 烦 琐 ,可 靠性 较 低 ;而 且 效率 较 低 ,大 部 分 能 量 消 耗 在 三 极 管得 发 热 上 。
CurrentDecaySetting
较 单一 ,很 多是 针对 固定 的步进 电机 或者 和温 度 过 高 自动保 护 等 功 能 。掉 电存储 电
固定 的应 用领 域 ,而 且价 格 一般 较 高 ,很 路采 用Atmel公司 的AT24C04 (EEPROM) ;
多 不带 细 分功 能 ,很 难满 足 现 实生 活 中 需 显示 电路采 用 1602液 晶 显示 模 块 ;输入 设
掉 电存 储 芯片 ;使 用 中必 须 实 时显 示速 度 和 圈数 , 因此 应该 选 用 能显 示 多个 数据 的 1602液 晶显示 模 块 ;使 用 中对 稳定 性和 实 用性 有 很 高的 要求 ,使用 集 成 芯片 外 围 电 路简 单 、功 能 强大 ,可 以把 单 片机 大量 的 资源 用在 其 他 地方 ,不仅 增 加 了系 统 的整 体稳 定 性和 实 用性 ,而且 还 能增 加 许 多其
基于FPGA的步进电机控制器设计

基于FPGA的步进电机控制器设计步进电机是一种常见的电动机,具有精准控制和高可靠性的特点。
而FPGA(Field Programmable Gate Array)是一种可编程逻辑器件,可以实现复杂逻辑功能。
结合FPGA和步进电机进行控制,可以实现更高精度和更灵活的控制方式。
首先,步进电机的控制需要确定三个参数:步进角度、步进速度和步进方向。
FPGA可以通过编程的方式实现对这些参数的实时控制。
基于FPGA的步进电机控制器设计需要实现以下几个模块:1.步进电机驱动器:这个模块负责将FPGA输出的控制信号转换为适合步进电机的电压和电流。
可以使用高驱动能力的电路来驱动步进电机,确保电机可以正常运行。
2.位置控制器:这个模块负责根据输入的步进角度和方向控制步进电机的转动。
可以使用计数器和比较器来实现精确的角度控制,通过FPGA 的编程方式可以实时调整步进角度和方向。
3.速度控制器:这个模块负责调整步进电机的转动速度。
可以使用定时器和计数器来实现一个精确的时间基准,通过调整计数器的数值来控制步进电机的速度。
FPGA的编程方式可以实时调整步进速度。
4.通信接口:这个模块负责与外部设备进行通信。
可以使用UART、SPI或者I2C等通信协议,通过FPGA的外部接口与其他设备进行交互。
以上几个模块可以通过FPGA内部的硬件描述语言(如VHDL或Verilog)进行编程实现。
通过FPGA的编程方式,可以实时调整步进电机的控制参数,提高步进电机的精度与稳定性。
但是,基于FPGA的步进电机控制器设计也存在一些挑战。
首先是硬件资源的限制,FPGA的资源有限,需要合理分配资源,确保系统的运行效率和稳定性。
其次是时序设计的复杂性,步进电机的精确控制需要高频率的脉冲信号,要求FPGA具备快速响应和高速计数的能力。
综上所述,基于FPGA的步进电机控制器设计可以实现精确控制和高可靠性,并且具有灵活性和可编程性,可以适应不同的应用场景。
步进电机控制系统设计报告
课程设计报告单片机课程设计课程设计题目:步进电机无级调速系统设计姓名:学号:专业:班级:指导教师:10年4月29 日目录摘要随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。
采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。
软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。
本设计是采用AT89C51单片机对步进电机的控制,通过IO口输出的时序方波作为步进电机的控制信号,信号经过芯片ULN2003驱动步进电机;同时,用 4个按键来对电机的状态进行控制,并用数码管动态显示电机的转速。
系统由硬件设计和软件设计两部分组成。
其中,硬件设计包括AT89C51单片机的最小系统、电源模块、键盘控制模块、步进电机驱动(集成达林顿ULN2003)模块、数码显示(SM420361K数码管)模块、测速模块(含霍尔片UGN3020)6个功能模块的设计,以及各模块在电路板上的有机结合而实现。
软件设计包括键盘控制、步进电机脉冲、数码管动态显示以及转速信号采集模块的控制程序,最终实现对步进电机转动方向及转动速度的控制,并将步进电机的转动速度动态显示在LED数码管上,对速度进行实时监控显示。
软件采用在Keil软件环境下编辑的C语言。
本系统具有智能性、实用性及可靠性的特点。
本控制系统的设计采用实验室中的试验箱单片机控制,通过人为按动各开关实现步进电机的开关,以及电机的加速及减速功能,另外还增加可设正反转的功能,具有灵活方便、适应范围广易懂的特点,能够满足实现自身实践动手能力提高的需求。
步进电机控制器的设计
m a c ndd i n rn il ft em ir p o e s rS n e a rvig p icp eo h co r c so TM 3 F1 3 2 0 RBT6a d te se oo ’ d iig c i 2 . i p rd sg e n h tpm trS rvn hp L6 08 Th spa e e i n da
n w p tpmoo o t l rwh s p t us f r igc i s rvd db iet ii l rq e c nh s e DDS . h ot e t es tr nr l , oei u leo i n hpwa o ie ydrc gt eu n ys tei r( y e c oe n p dv p d af y z )T esf —
为 两类 :可变磁 阻 步进 电机 和永 磁步 进 电机 。本 文
重 点讨论永 磁步进 电机 …。
1 步 进 电 机 的 工 作 原 理
可 以通过控 制脉 冲个 数来控 制角 位移量 ,从而 达 到准确 定位 的 目的 :同时可 以通过 脉冲频 率来 控
制 电机转 动 的速 度 ,从而达 到调速 的 目的 。
c n c n r lt e f u — ha e s e t r c ur t l n e i bl e l i . a o to h o rp s t p mo o c a e y a d r la y i r a me a n t
Ke r s se t r c nto lr d r c gi l r q e c y t e ie y wo d : t p mo o ; o r l ; ie t e di t e u n y s n h sz r af
基于stm32的步进电机控制系统设计与实现
基于stm32的步进电机控制系统设计与实现基于STM32的步进电机控制系统设计与实现1. 概述步进电机是一种非常常见的电动机,在许多自动化系统和工控设备中得到广泛应用。
它们具有精准的定位能力和高效的控制性能。
本文将介绍如何使用STM32微控制器来设计和实现步进电机控制系统。
2. 硬件设计首先需要确定步进电机的规格和要求,包括步距角、相数、电流和电压等。
根据步进电机的规格,选择合适的驱动器芯片,常见的有L298N、DRV8825等。
接下来,将选定的驱动器芯片与STM32微控制器相连。
通常,步进电机的控制信号需要使用到微控制器的GPIO引脚,同时由于步进电机的工作电流比较大,需要使用到微控制器的PWM输出信号来调节驱动器芯片的电流限制。
除此之外,还需要一个电源电路来提供驱动器和步进电机所需的电源。
可以选择使用一个电源模块,也可以自行设计电源电路。
3. 软件设计软件设计是步进电机控制系统的核心部分,主要包括步进电机驱动代码的编写和控制算法的实现。
首先,需要在STM32的开发环境中编写步进电机驱动代码。
根据所选的驱动器芯片和步进电机规格,编写相应的GPIO控制代码和PWM输出代码。
同时,可以添加一些保护性的代码,例如过流保护和过热保护等。
接下来,需要设计和实现步进电机的控制算法。
步进电机的控制算法通常是基于位置控制或速度控制的。
对于位置控制,可以使用开环控制或闭环控制,闭环控制通常需要使用到步进电机的编码器。
对于开环控制,可以通过控制步进电机的脉冲数来控制位置。
通过控制脉冲的频率和方向,可以实现步进电机的转动和停止。
这种方法简单直接,但是定位精度有限。
对于闭环控制,可以使用PID控制算法或者更高级的控制算法来实现位置控制。
通过读取步进电机的编码器反馈信号,可以实时调整控制输出。
这种方法可以提高定位精度和抗干扰能力,但是算法实现相对复杂。
4. 系统实现在完成硬件设计和软件设计后,可以进行系统的调试和实现。
基于51单片机的步进电机控制系统设计与实现

步进电机工作原理
步进电机是一种基于磁场的控制系统,工作原理是当电流通过定子绕组时,会 产生一个磁场,该磁场会吸引转子铁芯到相应的位置,从而产生一定的角位移。 步进电机的角位移量与输入的脉冲数量成正比,因此,通过控制输入的脉冲数 量和频率,可以实现精确的角位移和速度控制。同时,步进电机具有较高的分 辨率和灵敏度,可以满足各种高精度应用场景的需求。
二、系统设计
1、硬件设计
本系统主要包括51单片机、步进电机、驱动器、按键和LED显示等部分。其中, 51单片机负责接收按键输入并控制步进电机的运动;步进电机用于驱动负载运 动;驱动器负责将51单片机的输出信号放大,以驱动步进电机。LED显示用于 显示当前步进电机的状态。
2、软件设计
软件部分主要包括按键处理、步进电机控制和LED显示等模块。按键处理模块 负责接收用户输入,并根据输入控制步进电机的运动;步进电机控制模块根据 按键输入和当前步进电机的状态,计算出步进电机下一步的运动状态;LED显 示模块则负责实时更新LED显示。
三、系统实现
1、按键输入的实现
为了实现按键输入,我们需要在主程序中定义按键处理函数。当按键被按下时, 函数将读取按键的值,并将其存储在全局变量中。这样,主程序可以根据按键 的值来控制步进电机的转动。
2、显示输出的实现
为了实现显示输出,我们需要使用单片机的输出口来控制显示模块的输入。在 中断服务程序中,我们根据设定的值来更新显示模块的输出,以反映步进电机 的实时转动状态。
基于单片机的步进电机控制系统需要硬件部分主要包括单片机、步进电机、驱 动器、按键和显示模块等。其中,单片机作为系统的核心,负责处理按键输入、 控制步进电机转动以及显示输出等功能。步进电机选用四相八拍步进电机,驱 动器选择适合该电机的驱动器,按键用于输入设定值,显示模块用于显示当前 步进电机的转动状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
湖北汽车工业学院科技学院 KT1023-3 ONION
实时控制系统的步进电机速度控制器设计
设计内容与要求:利用TPC-H通用微机接口实验箱设计一个实时控制系统的步进电机速度控制器。
步进电机为四相,步距角为180/步,以单四拍方式运行。
要求采用定时中断的方法控制步进电机的速度,转速在1~60r/min之间连续可调,具有正反转控制功能。
程序如下:
DA TA SEGMENT
BUFF DW 0H,0BB8H,05DCH,3E8H,2EEH,258H,1F4H,1ACH,177H,14DH,12CH DW 110H,0FAH,0E6H,0D6H,0C8H,0BBH,0B0H,0A6H,9DH,96H
DW 8EH,88H,82H,7DH,78H,73H,6FH,6BH,67H,64H
DW 60H,5DH,5AH,58H,55H,53H,51H,4EH,4CH,4BH
DW 49H,47H,45H,44H,42H,41H,3FH,3EH,3DH,3CH
DW 3AH,39H,38H,37H,36H,35H,34H,33H,32H,32H
BUF DW 1H
BUF2 DB 0
DA TA ENDS
STAK SEGMENT
STA0 DB 128 DUP(?)
STAK ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DA TA,SS:STAK
START:MOV AX,DATA;
MOV DS,AX
;8255初始化
MOV DX,240BH ;288H~28FH
MOV AL,10001011B ; A口输出,C口输入
OUT DX,AL
;PA0-PA3控制电机的ABCD
;PC7正反转,PC6脉冲,PC5-PC0共6个控时间
;8253初始化
;计数器0
MOV DX,2403H; 280H~287H
MOV AL,00110110B;方式3
OUT DX,AL
MOV DX,2400H
MOV AX,1000
OUT DX,AL
MOV AL,AH
OUT DX,AL
MOV BUF2,33H ;A口输出初始值
MOV BX,OFFSET BUFF
MOV SI,0
;计数器1 方式0
NEXT:MOV AX,BUF
AND AX,3FH
MOV SI,AX
SAL SI,1
MOV AX,[BX+SI]
MOV BUF,AX
MOV DX,2403H ; 280H~287H
MOV AL,01110000B
OUT DX,AL
MOV DX,2401H
MOV AX,BUF
OUT DX,AL
MOV AL,AH
OUT DX,AL
L0:MOV DX,240AH
IN AL,DX
TEST AL,40H
JNZ L1
JMP L0
L1: TEST AL,80H
JNZ ZZ
;FZ:
AND AL,3FH
CBW
MOV BUF,AX
MOV AL,BUF2
ROR AL,1 ;<-,PA3~PA0接A~D
MOV BUF2,AL
JMP SCZ
ZZ:
AND AL,3FH
CBW
MOV BUF,AX
MOV AL,BUF2
ROL AL,1 ;->,PA3~PA0接A~D
MOV BUF2,AL
SCZ: MOV DX,2408H
;MOV AL,BUF2
OUT DX,AL ;A口最终的输出值
;有按键就退出
MOV AH,0BH
INT 21H
CMP AL,0FFH
JZ EXIT
MOV AX,BUF
CMP AL,1 ;最低速1r/min
JB L3
CMP AL,60 ;最高速60r/min
JA L4
JMP NEXT
L3:MOV AX,1
MOV BUF,AX
;CALL ASCI
JMP NEXT
L4:MOV AX,60
MOV BUF,AX
;CALL ASCI
JMP NEXT
;退出
EXIT:MOV AX,4C00H
INT 21H
CODE ENDS
END START。