磁悬浮平面电机
磁悬浮风机原理

磁悬浮风机原理磁悬浮风机是一种利用磁悬浮技术来实现风机旋转的新型风机设备。
它采用了磁悬浮轴承的原理,通过电磁力使风机转子悬浮于磁场中,从而实现无接触、无摩擦的旋转运动。
磁悬浮风机具有高效节能、无噪音、无振动、寿命长等优点,被广泛应用于空调、通风、工业制冷等领域。
磁悬浮风机的工作原理是基于磁悬浮轴承的技术。
磁悬浮轴承是一种利用磁力平衡来支撑和悬浮旋转物体的装置。
在磁悬浮风机中,通过在转子和固定部分之间设置磁悬浮轴承,使得转子可以悬浮在磁场中,并通过磁力的作用来实现旋转。
磁悬浮轴承主要由固定部分和转子部分组成。
固定部分包括定子和控制系统,定子上安装有电磁线圈。
转子部分包括转子和磁体,磁体通过磁场感应产生电流,从而产生反向的磁场。
当电流通过定子上的电磁线圈时,会产生一个磁场,这个磁场会与转子上的磁体产生相互作用,从而使转子悬浮起来。
通过调节电流的大小和方向,可以控制转子的悬浮高度和位置。
控制系统会根据转子的位置和速度信息来实时调节电流,以保持转子的稳定悬浮。
磁悬浮风机的旋转是利用电机的原理实现的。
在磁悬浮轴承上设置了驱动电机,通过电机的转动来带动风机转子旋转。
驱动电机通常是由无刷直流电机构成,通过电源和控制系统来提供电力和控制信号。
磁悬浮风机的控制系统是整个系统的关键部分,它负责实时监测和控制转子的位置和速度。
控制系统可以通过传感器获取转子的位置和速度信息,并根据设定的目标值来调节电流和电压,以实现转子的稳定悬浮和旋转。
磁悬浮风机的应用范围广泛。
在空调系统中,磁悬浮风机可以替代传统的轴承风机,具有更高的效率和更低的噪音。
在通风系统中,磁悬浮风机可以提供更大的风量和更稳定的风压。
在工业制冷系统中,磁悬浮风机可以提供可靠的冷却效果,同时减少能耗和维护成本。
总结起来,磁悬浮风机利用磁悬浮轴承的原理实现了无接触、无摩擦的旋转运动。
它具有高效节能、无噪音、无振动、寿命长等优点,被广泛应用于空调、通风、工业制冷等领域。
磁悬浮电机

磁悬浮电机的技术创新与发展动态
技术创新
• 磁路设计创新:采用新型磁极形状和磁屏蔽设计,提高磁场性能 • 控制策略创新:采用人工智能、物联网等先进技术,实现磁悬浮电机的智能化控 制 • 传感器技术创新:采用新型传感器技术和信号处理算法,提高检测精度和可靠性
发展动态
• 国际竞争加剧:各国纷纷加大对磁悬浮电机技术的研发力度,争夺市场份额 • 产业化进程加速:磁悬浮电机技术在各类应用领域的产业化进程加速 • 政策支持加大:各国政府加大对磁悬浮电机技术的政策支持力度,推动产业发展
磁悬浮电机在其他领域的应用与前景
航空航天
• 采用磁悬浮电机作为发动机驱动电机,提高发动机的效 率和稳定性 • 如无人机、火箭等
医疗器械
• 采用磁悬浮电机作为医疗设备驱动电机,实现高精度、 低噪音的医疗效果 • 如磁共振成像(MRI)设备等
04
磁悬浮电机的技术挑战与发展趋势
磁悬浮电机的技术难题与研究方向
设计要点
• 磁路设计:合理分布磁极,产生稳定的磁场 • 控制系统设计:采用高性能控制器,实现高精度控制 • 传感器设计:选择合适的传感器类型和安装位置,提高检测精度
磁悬浮电机的磁路设计与优化
磁路设计
• 磁极分布:合理分布磁极,使磁场在转子表面产生均匀的悬浮力 • 磁材料选择:选择高磁能密度、低损耗的磁材料,如钕铁硼 • 磁屏蔽设计:在磁路中设置磁屏蔽,减少漏磁,提高效率
磁路优化
• 磁极形状优化:采用优化的磁极形状,提高磁场分布的均匀性 • 磁路间隙优化:合理设置磁路间隙,降低磁阻,提高效率 • 磁材料用量优化:在保证性能的前提下,尽量减少磁材料的用量,降低成本
磁悬浮电机的控制系统设计与实现
制、模糊控制等先进的控制策略 • 传感器信号处理:对传感器信号进行滤波、放大等处理,提高信号质量 • 驱动电路设计:设计合适的驱动电路,实现电枢电流的调整
磁悬浮平面电机原理

磁悬浮平面电机原理
嘿,咱来唠唠磁悬浮平面电机原理,这可就像一场神奇的“魔法秀”呢!
咱先得知道,磁悬浮平面电机啊,就像一个有超能力的家伙。
它里面有磁铁,这磁铁就像有魔法的小精灵。
有永磁体和电磁体两种呢。
永磁体就像那种一直有魔力的小精灵,一直带着磁性。
电磁体呢,就像可以被施魔法(通电)然后产生磁性的小精灵。
我有一次去参观一个科技展,那里有个磁悬浮平面电机的模型,可有意思啦。
这个电机工作的时候,就像一场精彩的表演。
当给电磁体通电的时候,它和永磁体之间就产生了一种奇妙的力量,就像两个有魔法的阵营开始互相作用啦。
这种力量能让电机的动子(可以理解为运动的部分)浮起来呢,就像有一双无形的大手把它托起来,这就是磁悬浮啦。
然后呢,平面电机嘛,它能在平面上动起来,这是为啥呢?这是因为通过改变电流的大小和方向,就像给电磁体小精灵们不同的指令。
这些指令让它们产生的磁场发生变化,这个变化的磁场就像一条看不见的轨道,推动着动子在平面上移动。
而且哦,这种电机的好处可多啦。
它没有那些传统电机的摩擦问题,就像一个滑冰高手在冰面上滑行,几乎没有阻力。
在那个科技展模型里,我看到动子在平面上移动得可顺畅啦,没有一点卡顿。
要是传统电机,就像穿着拖鞋在粗糙的地面上走,走起来又费劲又容易坏。
磁悬浮平面电机的原理就是这么神奇,就像一场魔法和科技交织的表演。
这些磁铁小精灵们在电流的指挥下,让电机动子既能悬浮又能在平面上自由活动,给我们带来了这么厉害的技术,说不定以后能在更多更酷的地方看到它呢,比如超高速的运输系统之类的,那可就太牛啦!。
磁悬浮平面电机的解耦控制策略_周赣

Decoupling Control Strategy of Magnetic Levitation Planar Motor
ZHOU Gan1, HUANG Xue-liang1, BO Rui2, FU Meng1, ZHANG Qian1
(1. School of Electrical Engineering, Southeast University, Nanjing 210096, Jiangsu Province, China; 2. Department of Electrical Engineering and Computer Science, University of Tennessee, Knoxville 37996, USA) ABSTRACT: There is tight electromagnetic and mechanical coupling among 6-degree of freedom (DOF) motions of magnetic levitation planar motor for photolithography. For decoupling control of the 6-DOF motions, this paper presents the current-controlled model of linear motors as the electromagnetic actuators, the decoupled kinetics model based on the modal forces, and the decoupling control strategy of the planar motor. The 6-DOF kinetics models are successfully decoupled by the modal forces and become simple 2nd order linear systems. The X position servo controller of the prototype is designed. The simulation results show that the controller proposed makes the decoupled X position control with the disired performaces and the control system has good immunity and robust stability. KEY WORDS: planar motor; modal forces; servo controller 摘要: 用于光刻加工的磁悬浮平面电机的 6 个运动自由度之 间存在着紧密的电磁和力学耦合。 为实现各运动自由度的解 耦控制,提出了直线电机型电磁执行器的电流控制模型、基 于模式力的解耦动力学模型和平面电机解耦控制策略。 模式 力使各自由度的动力学模型不再存在耦合,且都为简单的 2 阶线性系统。 设计了样机的 X 位置伺服控制器, 仿真结果表 明该控制器使解耦后的 X 位置控制达到了预期的动、 静态性 能,并具有良好的抗扰性和鲁棒性。 关键词:平面电机;模式力;伺服控制器
山东天瑞重工磁悬浮鼓风机原理

山东天瑞重工磁悬浮鼓风机原理
磁悬浮鼓风机是一种新型的节能产品,它采用磁悬浮技术来实现无接触运转,减少能量损失,提高效率。
山东天瑞重工磁悬浮鼓风机是一款高品质的产品,下面,我们来详细了解一下它的原理。
磁悬浮鼓风机由电机、控制器、气体测量仪、鼓风机壳体和气缸等部分组成。
它采用永磁同步电机作为动力源,通过磁悬浮系统实现无接触运转。
永磁同步电机的转子上固定有永久磁铁,定子上绕有三相交流绕组。
在运转过程中,电机控制器会根据气体测量仪的数据来调节电机的转速,从而控制鼓风机的输出量。
磁悬浮鼓风机的气缸采用了双活塞结构,能够保证气体的正向流动,使得鼓风机的输出更加稳定。
鼓风机壳体采用了双层结构,中间填充有隔音材料,减少了噪音的输出。
同时,鼓风机壳体还带有空气过滤器,能够有效地过滤掉空气中的杂质,保证了鼓风机的输出质量。
总的来说,山东天瑞重工磁悬浮鼓风机采用先进的磁悬浮技术,实现了无接触运转,具有高效、稳定、低噪音等优点,是一款非常优秀的节能产品。
- 1 -。
磁悬浮平面电机驱动及控制技术(张生果)PPT模板
1.7.2研究 内容
2
0
6
第2章电磁力/矩建模
第2章电磁力/矩建 模
2.1引言 2.2永磁阵列磁场解析模型建立及验证 2.3基于DQ变换的电磁力/矩建模及电流求取 2.4基于洛伦兹力积分法则的电磁力/矩建模及模 型验证 2.5小结
第2章电磁力/ 矩建模
2.2永磁阵列磁场解析模型建立及 验证
1
讨论
第2章电磁力/ 矩建模
2.4基于洛伦兹力积分法则的电磁 力/矩建模及模型验证
2.4.1电磁力/ 矩建模
01
2.4.3电磁 力 / 矩 模 型 03 与实测力/ 矩误差来源
分析
02 2 . 4 . 2 电 磁 力/矩模型 实验验证
0
7
第3章电气驱动——线圄阵列换流方法
第3章电气驱动—— 线圄阵列换流方法
3.3.3基于电流∞-范数有界的线圄阵列优化换流方法的数值 稳定性
3.3.4基于电流∞-范数有界的线圄阵列优化换流方法的仿真 分析
3.3.5基于电流∞-范数有界的线圄阵列优化换流方法的实验 验证
第3章电气驱动——线圄阵列换流方法
3.4线圈阵列热损耗均匀化
01
3.4.1线圈阵列热损耗均匀度、电 流均匀度及均匀化方法
3.2基于电流最小2-范数的线圈阵 列换流方法
A
3.2.1基于电流最小 2-范数的线圄阵列
换流方法
3.2.2换流仿真 及结果分析
B
第3章电气驱动——线圄阵列换流方法
3.3基于电流∞-范数有界的线圈阵列电流优化换流方法
3.3.1基于电流∞-范数有界的线圄阵列电流优化换流方法的 原理
3.3.2基于电流∞-范数有界的线圈阵列电流优化换流方法的 解析算法
磁悬浮技术的来源
磁悬浮技术的来源在1842年,英国物理学家Earnshaw 就提出了磁悬浮的概念,利用磁力使物体处于无接触悬浮状态,单靠永久磁铁是不能将一个铁磁体在所有六个自由度上都保持在自由稳定的悬浮状态,应当采用可控电磁铁。
这一思想成为了之后开展的磁悬浮列车和电磁轴承研究的主导思想。
磁悬浮技术的发展磁悬浮技术的研究开始于二十世纪二十年代,它的研究源自于德国,但是早期由于现代控制理论,电磁学,电子技术发展的缓慢,导致对其研究的进展相当缓慢,20世纪60年代以来,随着技术的发展,特别是固体技术的发展,国际上开始大规模研究磁悬浮技术,发展最成熟的是磁悬浮列车和磁悬浮轴承。
磁悬浮列车根据悬浮原理的不同分为常导型和超导型两大类前者以德国高速常导磁浮列车Transrapid为代表,后者以日本磁悬浮列车为代表磁悬浮轴承大体分为传统的磁悬浮轴承( 需要位置传感器) 和无传感器的磁悬浮轴承。
1969年,德国牵引机车公司的马法伊研制出小型磁悬浮列车系统模型在1km轨道上时速达165km。
1994年,日本研制的电动磁悬浮列车在74km长的轨道上时速达431km。
1999年,日本的超导磁悬浮列车时速达到552km。
德国经过20年的努力,技术上已趋成熟,已具有建造运营线路的水平。
原计划在汉堡和柏林之间修建的第一条时速为400km的磁悬浮铁路,总长度为248km,预计2003年正式投入营运。
但由于资金计划问题,2002年宣布停止了这一计划。
我国磁悬浮列车研究工作起步较迟,1989年3月,国防科技大学研制出我国第一台磁悬浮试验样车。
1995年,我国第一条磁悬浮列车试验线在西南交通大学成立,并且成功实施了稳定悬浮、导向、驱动控制、载人运行等时速为300km的试验。
西南交通大学这条实验线的建成,标志着我国营经掌握了制造磁悬浮列车的技术,上海铺设的磁悬浮铁路,使我国将成为世界上第一个具有磁悬浮运营铁路的国家。
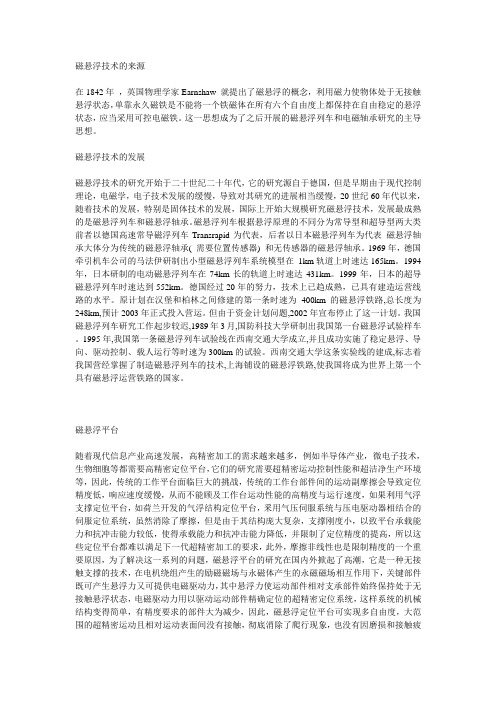
磁悬浮平台随着现代信息产业高速发展,高精密加工的需求越来越多,例如半导体产业,微电子技术,生物细胞等都需要高精密定位平台,它们的研究需要超精密运动控制性能和超洁净生产环境等,因此,传统的工作平台面临巨大的挑战,传统的工作台部件间的运动副摩擦会导致定位精度低,响应速度缓慢,从而不能顾及工作台运动性能的高精度与运行速度,如果利用气浮支撑定位平台,如荷兰开发的气浮结构定位平台,釆用气压伺服系统与压电驱动器相结合的伺服定位系统,虽然消除了摩擦,但是由于其结构庞大复杂,支撑刚度小,以致平台承载能力和抗冲击能力较低,使得承载能力和抗冲击能力降低,并限制了定位精度的提高,所以这些定位平台都难以满足下一代超精密加工的要求,此外,摩擦非线性也是限制精度的一个重要原因,为了解决这一系列的问题,磁悬浮平台的研究在国内外掀起了高潮,它是一种无接触支撑的技术,在电机绕组产生的励磁磁场与永磁体产生的永磁磁场相互作用下,关键部件既可产生悬浮力又可提供电磁驱动力,其中悬浮力使运动部件相对支承部件始终保持处于无接触悬浮状态,电磁驱动力用以驱动运动部件精确定位的超精密定位系统,这样系统的机械结构变得简单,有精度要求的部件大为减少,因此,磁悬浮定位平台可实现多自由度,大范围的超精密运动且相对运动表面间没有接触,彻底消除了爬行现象,也没有因磨损和接触疲劳所产生的精度下降和寿命问题,完美的解决了摩擦非线性的问题,具有无需润滑,无声,易控,高效,结构简单等特点,尤其适用于真空工作环境。
磁悬浮动力技术在造纸行业的节能应用

磁悬浮动力技术在造纸行业的节能应用⊙ 郑铁民郑铁民 先生山东天瑞重工有限公司总经理,研究员、世界生产力科学院院士、山东大学博士生导师、西安电子科技大学硕士生导师;享受国务院特殊津贴专家,国家“863”计划项目负责人,当代中国科学家与发明家,全国电子信息行业杰出企业家,国家级科技思想库决策咨询专家。
作为照排机总体设计师参与的“计算机激光汉字编辑排版系统”获得“国家科技进步奖一等奖”和“中国十大科技成就”。
1磁悬浮技术概念磁悬浮技术是运用可控电磁力使物体稳定悬浮,在磁力的驱动下进行轴向旋转运动或平面运动的一种技术。
1.1应用类型主要应用类型:轴向磁悬浮(机械工业领域)和平面磁悬浮(交通运输领域)。
轴向磁悬浮(机械工业领域):通过可控的电磁力将电机转轴悬浮起来,实现无接触摩擦、高速旋转,转子直接驱动做功。
主要应用于以旋转电机为动力源的轴向旋转机械,如磁悬浮鼓风机、磁悬浮真空泵、磁悬浮压缩机、磁悬浮发电机等。
平面磁悬浮(交通运输领域):通过可控的电磁力将物体悬浮起来,将旋转电机展开成直线电机,传动方式由旋转运动变为直线运动,主要应用于以直线电机为动力源的平面运动机械,如磁悬浮列车等。
1.2发展历程(图1)1.3结构与组成如图2所示,轴向磁悬浮电机由叶轮、转子、位置传感器、轴向磁轴承、径向磁轴承、定子以及独创风冷叶轮组成。
具有以下优点:(1)节能:节电30%以上,可短期回收投资成本,设备运行高效、稳定、可靠。
(2)降噪:噪音由120d B降低到80d B,不影响周边办公与居住。
(3)智能化:大数据平台,远程监控,操作系统简捷,自动故障诊断,模块化设计。
(4)免维护:无需润滑、机械保养,使用寿命长达20年,易安装,无油污染。
专题·special 32第44卷第9期 2023年5月热回收利用,烘干纸张。
磁悬浮鼓风机可用于造纸废水处理工段的废水曝气处理,也可用于自备电厂脱硫脱硝(热电烟气脱硫工艺)。
2.1产品介绍2.1.1磁悬浮透平真空泵流量范围:60~980 m 3/min 真空度范围:10~70 kPa比传统水环罗茨泵节能40%~70%,比传统透平节能15%以上;噪音降至80d B以下;余热可回收利用,减少蒸汽消耗;机箱一体化,智能控制,运行稳定,设计使用寿命长达20年。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多自由度平面电机
直接实现空间复合运动 结构轻便、 结构轻便、可实现高速的空间轨 迹的控制
空气悬浮平面电机
空气悬浮平面电机
磁悬浮平面电机
交流绕组: 交流绕组:悬浮与驱动合一 直流绕组: 直流绕组:悬浮与驱动分开 问题: 问题:大位移下非线性磁力建模与分析 计算机动态仿真与分析计算方法
磁悬浮平 面电机
测量系统
国内外研究现状分析
韩国三星电子机械公司 与汉城国立大学联合研 究的多自由度定位平台 采用三个内置的电容来 测量平台的运动, 测量平台的运动,为了 减小测量噪音, 减小测量噪音,测量放 大部分的印制电路安装 在悬浮平台上。 在悬浮平台上。整个系 统在y和 方向的定位精 统在 和z方向的定位精 度小于0.1µ , 度小于 µm,在各个 方向的旋转精度小于0.5 方向的旋转精度小于 弧秒。 弧秒。
Workpiece Translation Stage
Focusing Lens Laser Beam Computer Monitor & Control
超精密多自由度运动的实现原理
多自由度运动实现: 多自由度运动实现:在空间上各自由度上的 分别驱动,合成所需要的空间轨迹或路径; 分别驱动,合成所需要的空间轨迹或路径; 运动:旋转式——〉机构 运动:旋转式 〉机构——〉直线运动 〉 结构上的层叠式; 结构上的层叠式; 超精密的微驱动实现方法:粗定位——〉细 超精密的微驱动实现方法:粗定位 〉 定位,驱动器: 可控制的) 定位,驱动器: (可控制的)电、热、磁 等物理现象——〉运动 等物理现象 〉 高速、大位移、多自由度与超精密的统一等 高速、大位移、 问题
图像采集电路
CCD
荧光滤光片
高NA数物镜 数物镜 平面正交光栅 计算机
光源
工作平台
磁悬浮平面电机的控制系统 磁悬浮平面电机的控制系统
控制硬件和软件
服放大系统( 伺服放大系统(PWM,线性放大器) ,线性放大器) 基于开放式控制软件平台的硬件系统
基于MATLAB开放式运动控制卡 基于MATLAB开放式运动控制卡 MATLAB
产品: 产品: 根据压电陶瓷 压电陶瓷所具有的超声波驻 根据压电陶瓷所具有的超声波驻 波原理,nanomotion推出了极为 波原理,nanomotion推出了极为 先进的电子电机。 先进的电子电机。它的工作方式 和直流伺服电机类似, 和直流伺服电机类似,但却具有 压电执行机构特有的高分辨率 50纳米 和动态性能。 纳米) (50纳米)和动态性能。
磁悬浮平面电机
悬浮线圈
项目 悬浮线圈 特性和参数 线 径 ; 每 层 42 匝 , 共 8层; 总匝数 : 层 总匝数: 42X8=336匝 = 匝 I=2A = Z=0.5mm =
悬浮电流 平衡位置
磁悬浮平面电机
不同电流时的磁感应强度变化曲线
磁悬浮平面电机
驱动线圈
项目 特性和参数
推力线圈
线径; 每层 线径 ; 每层142匝 , 匝 共 7层 ; 总匝数 : 层 总匝数: 142X7=994匝/相 = 匝相 I=0.5A =
第6部分 超精密多自由度平面运动 实现方法
超细微加工工作台
以飞秒激光作为刀具: 以飞秒激光作为刀具:光斑为纳米级 以磁悬浮工作台作为定位工作台: 以磁悬浮工作台作为定位工作台: 工作范围1X1mm2 以基于CCD和正交光栅作为测量反馈系统:分辨率为0.1纳米 和正交光栅作为测量反馈系统 以基于 和正交光栅作为测量反馈系统: Mirror Ti:sapphire Laser
W.J. Kim and D. L. Trumper(MIT) ( )
Tokyo Institute of Technology,Japan
磁悬浮平面电机
设计方案
1. 采用无铁心的螺线管线 圈与永磁体配对使用。 圈与永磁体配对使用。 线圈静止、 线圈静止、永磁体移动 2. 悬浮线圈和驱动线圈都 使用直流电, 使用直流电,比较容易 控制。 控制。
耦合问题
多向耦合问题
悬浮电流
磁悬浮平面电机
Y
驱动力和加速度
F推 = nBIL = 32 B平 IL
L4 L2
= 32 × 0.49 × 7 × 0.5 × 37.96 × 10−3 2.083N
R
F推 2.083 a= = =9.057N / m 2 m 0.23
磁力线长度计算用图
测量系统
激光测量系统
测量系统
国内外研究现状分析
美国University of North 美国 Carolina 和MIT联合开 联合开 发的扫描显微镜多自由 度平台采用3个高精度 度平台采用 个高精度 电容传感器测量垂直方 向的三个自由度, 向的三个自由度,采用 3个四通激光外差干涉 个四通激光外差干涉 仪测量水平方向的三个 自由度。 自由度。 电容传感器的分辨率 0.1nm,测量范围为 , 100um。激光干涉仪的 。 分辨率优于0.1nm。 分辨率优于 。
测量系统
基于机器视觉和平面正交光栅超 精密工作台多自由度测量系统 1.基于平面正交光栅的 基于平面正交光栅的 超精密平台多维位置测 超精密平台多维位置测 量原理研究; 量原理研究; 2.基于机器视觉的超精 基于机器视觉的超精 密多自由度测量系统图 密多自由度测量系统图 形处理方法的研究; 形处理方法的研究; 3.基于机器视觉和平面 基于机器视觉和平面 正交光栅的超精密多自 由度测量系统的构建与 由度测量系统的构建与 试验研究。 试验研究。
国内外研究现状分析
MIT 采用激光干涉仪和高精 度电容进行多自由度位移检测, 度电容进行多自由度位移检测, 精度可达0.05um 精度可达
基于三维角度格子和表面二维角 度传感器的表面编码器( 度传感器的表面编码器(Surface Encoder),精度为 µm、0.01 ),精度为 ),精度为0.1µ 、 弧度。日本Tohoku大学 弧度。日本 大学