悬架减震器阻尼力控制的作业
基于阻尼力的减振器支架失效分析及改进

基于阻尼力的减振器支架失效分析及改进
蒋兵;张政;刘文慧;尹杨平
【期刊名称】《计算机辅助工程》
【年(卷),期】2024(33)1
【摘要】针对某车型前减振器支架在强化耐久道路试验中发生开裂的问题,基于减振器的阻尼力,采用有限元法对前减振器支架开裂进行仿真分析,并对原结构进行优化改进。
改进后的减振器支架结构搭载道路试验样车进行强化试验,结果表明改进方案的前减振器支架结构未出现开裂,具有较好的耐久性能。
【总页数】5页(P23-27)
【作者】蒋兵;张政;刘文慧;尹杨平
【作者单位】奇瑞汽车股份有限公司捷途品牌事业部研发院
【正文语种】中文
【中图分类】U463.335.1;TB115.1
【相关文献】
1.基于车辆半主动悬架的一种磁流变减振器阻尼力的理论推导及试验分析
2.基于车辆半主动悬架的一种磁流变减振器阻尼力的理论推导及试验分析
3.基于ANSYS CFX的抽油杆减振器阻尼力仿真分析
4.基于HyperWorks的减振器支架失效分开及优化
5.油压减振器阻尼力失效分析
因版权原因,仅展示原文概要,查看原文内容请购买。
浅析汽车底盘主动悬架控制方法
浅析汽车底盘主动悬架控制方法随着汽车技术的不断发展,汽车底盘主动悬架系统已经逐渐成为了一种常见的装备。
这种系统可以根据车辆当前的驾驶状态和路况来主动调节悬架硬度,提升行车舒适性和稳定性。
在本文中,我们将对汽车底盘主动悬架控制方法进行一个浅析。
一、主动悬架原理主动悬架是指车辆悬挂系统具备主动调节功能,通过传感器感知车身运动状态,再根据实时数据调节悬架系统的工作参数,实现对车身姿态和路面适应性的主动调节。
主动悬架主要包括主动减振和主动悬架控制两部分。
主动减振通过控制减振器的阻尼力来调节车辆的悬挂硬度;主动悬架控制则通过控制空气悬挂元件或电磁阻尼器来实现对车辆悬挂的主动调节。
二、主动悬架控制方法1. 传统悬架控制传统的悬架系统主要通过设置不同的弹簧和减振器来实现对车辆悬挂系统的调节。
这种悬架系统在工作过程中需要依靠车辆的行驶速度和路面情况来进行调节,无法实现主动的悬架控制。
因此在高速行驶和复杂路况下,传统悬架系统的性能会受到一定的限制。
主动悬架控制方法则是通过悬架系统内置的传感器和控制单元,实时感知车辆的运动状态和路面情况,并根据这些数据来主动调节悬架系统的工作参数。
目前主动悬架系统主要采用以下几种控制方法:(1)电子控制电子控制是主动悬架系统的核心技术之一,通过悬挂系统内置的控制单元收集和处理来自传感器的数据,并根据预设的悬架调节算法来控制悬挂系统的工作状态。
在电子控制技术的支持下,主动悬架系统可以根据车辆当前的行驶状态和路况主动调节悬架硬度,提升行车舒适性和稳定性。
(2)气动控制为了实现对悬架系统的精准控制,主动悬架系统还需要配备一套高效的控制算法。
主动悬架控制算法的设计主要考虑以下几点:姿态控制是主动悬架系统的重要功能之一,通过感知车辆的侧倾角和纵向加速度来调节悬架系统的工作状态,提升车辆的稳定性和操控性。
(2)路面适应(3)悬挂硬度调节主动悬架系统在汽车领域具有广泛的应用前景,目前已经成为了豪华车和高端车型的标配。
机械振动基础作业(有答案-全版)
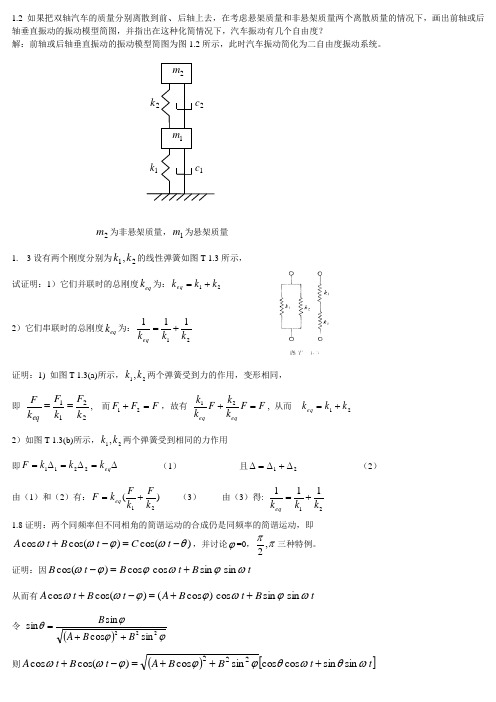
1.2 如果把双轴汽车的质量分别离散到前、后轴上去,在考虑悬架质量和非悬架质量两个离散质量的情况下,画出前轴或后轴垂直振动的振动模型简图,并指出在这种化简情况下,汽车振动有几个自由度?解:前轴或后轴垂直振动的振动模型简图为图1.2所示,此时汽车振动简化为二自由度振动系统。
2m 为非悬架质量,1m 为悬架质量1. 3设有两个刚度分别为21,k k 的线性弹簧如图T-1.3所示, 试证明:1)它们并联时的总刚度eq k 为:21k k k eq +=2)它们串联时的总刚度eq k 为:21111k k k eq +=证明:1) 如图T-1.3(a)所示,21,k k 两个弹簧受到力的作用,变形相同, 即2211k F k F k F eq ==, 而F F F =+21,故有 F F k kF k k eq eq =+21, 从而 21k k k eq +=2)如图T-1.3(b)所示,21,k k 两个弹簧受到相同的力作用 即∆=∆=∆=eq k k k F 2211 (1)且21∆+∆=∆ (2)由(1)和(2)有:)(21k Fk F k F eq += (3) 由(3)得:21111k k k eq += 1.8证明:两个同频率但不同相角的简谐运动的合成仍是同频率的简谐运动,即)cos()cos(cos θωϕωω-=-+t C t B t A ,并讨论ϕ=0,ππ,2三种特例。
证明:因t B t B t B ωϕωϕϕωsin sin cos cos )cos(+=-从而有t B t B A t B t A ωϕωϕϕωωsin sin cos )cos ()cos(cos ++=-+令 ()ϕϕϕθ222sin cos sin sin B B A B ++=则()[]t t B B A t B t A ωθωθϕϕϕωωsin sin cos cos sin cos )cos(cos 222+++=-+=())cos(sin cos 222θωϕϕ-++t B B A令C=()ϕϕ222sin cos B B A ++,则有 )cos()cos(cos θωϕωω-=-+t C t B t A当ϕ=0时,C=A+B ;当ϕ=2π时,22B A C +=,22BA arcsin +=B θ ;当ϕ=π时,B A -=C ,0=θ1.13汽车悬架减振器机械式常规性能试验台,其结构形式之一如图T-1.13所示。
《2024年连续可调阻尼减振器设计与半主动悬架的控制算法仿真》范文
《连续可调阻尼减振器设计与半主动悬架的控制算法仿真》篇一一、引言随着汽车工业的不断发展,汽车悬架系统的设计与优化逐渐成为汽车研发的关键领域之一。
连续可调阻尼减振器作为现代汽车悬架系统的重要组成部分,其设计及性能的优劣直接关系到汽车的行驶平稳性、乘坐舒适性以及操控稳定性。
同时,半主动悬架控制算法的研发也是提升汽车性能的重要手段。
本文将重点探讨连续可调阻尼减振器的设计及半主动悬架的控制算法仿真。
二、连续可调阻尼减振器设计1. 设计理念连续可调阻尼减振器设计的核心思想是通过改变阻尼力的大小,实现对汽车振动的有效控制。
这种减振器可以根据不同的行驶工况和路况,自动调整阻尼力,以达到最佳的减振效果。
2. 设计参数设计过程中,需要考虑的主要参数包括减振器的结构、材料、阻尼力范围、响应速度等。
其中,阻尼力的大小是关键因素,需要根据不同的需求进行精确计算和调整。
此外,减振器的结构也需要根据实际需求进行优化设计,以提高其耐用性和可靠性。
3. 设计流程设计流程包括理论计算、仿真分析、样机试制、性能测试等步骤。
在理论计算阶段,需要建立数学模型,对减振器的性能进行预测和分析。
仿真分析阶段则通过计算机仿真软件对设计进行验证和优化。
样机试制阶段则根据仿真结果制造出实际样机,进行性能测试。
三、半主动悬架控制算法仿真1. 控制算法选择半主动悬架控制算法的选择对于提高汽车行驶平稳性和乘坐舒适性至关重要。
常见的控制算法包括天棚阻尼控制算法、预瞄控制算法、模糊控制算法等。
这些算法各有优缺点,需要根据实际需求进行选择和优化。
2. 仿真模型建立在仿真分析阶段,需要建立汽车悬架系统的仿真模型。
这个模型应该能够真实地反映汽车在实际行驶过程中的振动特性。
同时,还需要建立减振器和控制算法的仿真模型,以便对整体性能进行评估和优化。
3. 仿真结果分析通过仿真分析,可以得出半主动悬架在不同工况和路况下的性能表现。
这些结果可以用于评估控制算法的优劣,以及为实际样机的试制和性能测试提供参考依据。
基于阻尼力调节的汽车悬架振动性能的研究
用流量控制法或压力控制法, 可明显 减小车身的振 动 。近年 来 , 日本 日产公 司研 制 了 液力 主动 控 制 系
统 , 图 1 示 。它 由压力控 制 阀与小 型蓄 能器 、 如 所 液 压缸 相结 合 , 在不平 路 面上 的振 动输 入 被 蓄 能 器 吸 收, 从而 减少 整个 系统所 需要 的能 量 , 架质量 的振 悬 动控 制 由液力 系统 的主 动 阻 尼 和动 阻 尼 共 同完 成 。 因此 , 主动控 制悬 架 系统 与最初 的 主动悬架 相 比, 该 耗 能较少 , 构较 复杂 , 结 造价 较贵 。 半 主动控 制悬 架 系统是 通过输 入 少量能 量 以调 节 减振器 的液力 阻尼 , 改善悬 架 的振动 特性 , 一般 采 用 o/f控 制法或 分段 控制 法 。在路 面 的随机 作用 nof 下 , 架 系统则 具 有 明 显 的非 线 性 动 力 特性 。应 用 悬 半 主动控 制 的悬架 系统 由于 车身 的结构 振动 而造 成
基 于 阻尼 力调 节 的汽 车 悬 架振 动性 能 的研 究
徐 丽娟
( 黑龙- X  ̄ 学院 机 电工程 系, 2 . r - 黑龙 江 哈 尔滨 10 5 ) 5 0 0
摘 要: ቤተ መጻሕፍቲ ባይዱ出一种基于减振器阻尼力调节 的汽 车悬架振 动系统 。该 系统根据 悬架 系统在路 面随机激 励作用 下的非
维普资讯
第2 1卷第 1 期
20 07年 3月
黑
龙
江
工
程
学
院
学
报( 自然科 学 版 )
V0 . 1 N . 12 o 1
Ma . 2 0 r ,0 7
J u n l fHeln ja g I si t f c n lg o r a i gin n tt eo h oo y o o u Te
《2024年连续可调阻尼减振器设计与半主动悬架的控制算法仿真》范文
《连续可调阻尼减振器设计与半主动悬架的控制算法仿真》篇一一、引言随着汽车工业的快速发展,车辆行驶的平稳性和舒适性越来越受到人们的关注。
连续可调阻尼减振器作为一种新型的减振装置,在提高车辆行驶的平稳性和舒适性方面具有重要作用。
本文将介绍连续可调阻尼减振器的设计原理及其实现在半主动悬架系统中的应用,并对其控制算法进行仿真分析。
二、连续可调阻尼减振器设计2.1 设计原理连续可调阻尼减振器通过改变阻尼力的大小,实现对振动能量的有效吸收和耗散。
其设计原理主要依赖于阻尼材料的特性以及结构设计。
在阻尼材料的选择上,需要选择具有高能量吸收、高稳定性及耐久性的材料。
在结构设计上,要考虑到阻尼力的调节范围、调节速度以及结构的紧凑性等因素。
2.2 结构设计连续可调阻尼减振器的结构设计主要包括活塞、阻尼材料、油封等部分。
其中,活塞的设计要考虑到其运动轨迹的精确性和稳定性;阻尼材料的选择和布置要保证其在各种工况下都能发挥良好的减振效果;油封的设计要保证油液的密封性,防止油液泄漏。
三、半主动悬架系统设计与实现3.1 半主动悬架系统原理半主动悬架系统通过调整减振器的阻尼力,实现对车辆振动的有效控制。
与传统的被动悬架相比,半主动悬架具有更高的控制精度和适应性。
在半主动悬架系统中,减振器是核心部件,其性能直接影响整个系统的性能。
3.2 半主动悬架系统实现在半主动悬架系统中,通过传感器实时监测车辆的振动情况,并将数据传输给控制器。
控制器根据接收到的数据,通过控制算法调整减振器的阻尼力,从而实现对车辆振动的有效控制。
此外,还需要对传感器和控制器进行优化设计,以提高系统的稳定性和可靠性。
四、控制算法仿真分析4.1 仿真环境与模型建立为了对半主动悬架系统的控制算法进行仿真分析,需要建立相应的仿真环境和模型。
仿真环境应包括车辆的动力学模型、路面模型、传感器模型、减振器模型等。
在建立模型时,需要考虑到各种因素的影响,以保证仿真的准确性和可靠性。
《连续可调阻尼减振器设计与半主动悬架的控制算法仿真》范文
《连续可调阻尼减振器设计与半主动悬架的控制算法仿真》篇一一、引言随着汽车工业的不断发展,汽车悬架系统的设计与优化逐渐成为提升汽车驾驶体验与乘坐舒适性的关键因素。
其中,连续可调阻尼减振器以及半主动悬架控制算法的研究备受关注。
本文旨在详细阐述连续可调阻尼减振器的设计过程以及其与半主动悬架控制算法的仿真研究。
二、连续可调阻尼减振器设计2.1 设计理念连续可调阻尼减振器设计的核心在于通过智能控制,实现阻尼力的大范围、连续可调。
该设计能够根据车辆行驶的不同路况及驾驶需求,自动调整减振器的阻尼力,从而提高汽车的操控性及乘坐舒适性。
2.2 设计参数减振器的设计参数包括阻尼系数、刚度、工作温度范围等。
在连续可调阻尼减振器的设计中,需要综合考虑这些参数的相互影响,以达到最佳的减振效果。
2.3 设计过程连续可调阻尼减振器的设计过程包括结构设计和控制策略设计两部分。
其中,结构设计需考虑减振器的材料选择、制造工艺等因素;控制策略设计则需根据不同的使用场景及驾驶需求,制定相应的阻尼力调整策略。
三、半主动悬架控制算法仿真3.1 仿真模型建立为验证连续可调阻尼减振器在半主动悬架系统中的性能,需要建立相应的仿真模型。
该模型应包括车辆动力学模型、道路模型以及半主动悬架系统模型等。
其中,半主动悬架系统模型应包括连续可调阻尼减振器的设计参数及控制策略。
3.2 仿真算法选择在仿真过程中,需选择合适的控制算法。
常用的控制算法包括PID控制、模糊控制、神经网络控制等。
本文选择了模糊控制算法进行仿真研究,其具有较好的鲁棒性及自适应性,能够较好地适应不同路况及驾驶需求。
3.3 仿真结果分析通过仿真实验,我们可以得到连续可调阻尼减振器在半主动悬架系统中的性能表现。
具体包括车身加速度、悬架动行程、轮胎动载荷等指标的对比分析。
通过对比分析,我们可以得出连续可调阻尼减振器在提高汽车操控性及乘坐舒适性方面的优势。
四、结论本文详细阐述了连续可调阻尼减振器的设计与半主动悬架控制算法的仿真研究。
电动化底盘主动悬架系统高度与阻尼集成控制

电动化底盘主动悬架系统高度与阻尼集成控制赵景波;倪彰;贝绍轶;冯俊萍【摘要】为解决电动化底盘主动悬架系统车身高度或可调阻尼的单独控制问题,改善车辆的整车减振性能,提出了一种车身高度与可调阻尼集成控制的主动悬架集成控制系统,以空气包取代传统的螺旋弹簧,以阻尼分级可调的减振器取代传统减振器,车身高度控制在正常车高模式、车身升高模式和车身降低模式之间切换,可调阻尼控制在软压缩软回弹模式、硬压缩软回弹模式、软压缩硬回弹模式和硬压缩硬回弹模式之间切换。
进行了不同模式下车速为60 km/h工况下的蛇行试验实车道路测试,并分析了主动悬架集成控制系统对整车动态特性的影响。
结果表明,不同模式下的方向盘转角分别为74.5150、69.6032、66.3158和65.8907 deg,方向盘转矩分别为4.5238、4.4400、4.5944和4.4709 N · m,车身侧倾角分别为3.2103、3.0899、2.9877和3.1958 deg,车身横摆角速度分别为16.7901、15.9259、15.1080和15.1499 deg/s,侧向加速度分别为0.5700、0.5488、0.5309和0.5418 g;车身高度与可调阻尼集成控制系统实现了主动悬架系统与整车的良好匹配,提升了车辆的综合性能;验证了主动悬架系统集成控制策略及其结构设计的可行性。
对车辆底盘集成控制系统的设计及控制策略的研究具有重要的理论研究价值和工程应用前景。
%In order to solve the individual control problem of body height or adjustable damping for electric chassis active suspension and to improve the full vehicle performance, a kind of integrated control system with body height and adjustable damping was proposed. The traditional spiral spring was replaced by air bag, and traditional shock absorber was replaced by the adjustable damper. The body height was controlled in the switching modes of the normal height mode, the bodyraise mode and the body reduction mode. The adjustable damper was controlled in the soft compression and soft rebound mode, the hard compression and soft rebound mode, the soft compression and hard rebound mode and the hard compression and hard rebound mode. Full vehicle snaking test with 60 km/h was conducted under different modes and the impact of active suspension integrated control system on the vehicle dynamic characteristics was analyzed. The results show that the test results of steering wheel angle under different modes were 74. 515 0、69. 603 2、66. 315 8 and 65. 890 7 deg respectively, the steering wheel torque under different modes were 4. 523 8、4. 440 0、4. 594 4 a nd 4. 470 9 N·m re-spectively, the body roll angle under different modes were 3. 210 3、3. 089 9、2. 987 7 and 3. 195 8 deg respectively, the yaw rate under different modes were 16. 790 1、15. 925 9、15. 108 0 and 15. 149 9 deg/s respectively, the lateral acceleration under different modes were 0. 570 0、0. 548 8、0. 530 9 and 0. 541 8 g respectively. The integrated control system of body height and adjustable damping achieve good matching between the active suspension system and vehicle, and the vehicle comprehensive performance is improved. The feasibility of the integrated control strategy and struc-ture design of active suspension system is verified. It has an important value for theoretical research and engineering application of vehicle integrated control system and its control strategy.【期刊名称】《广西大学学报(自然科学版)》【年(卷),期】2015(000)002【总页数】10页(P347-356)【关键词】主动悬架;空气弹簧;阻尼可调减振器;车身高度;集成控制【作者】赵景波;倪彰;贝绍轶;冯俊萍【作者单位】汽车仿真与控制国家重点实验室,吉林长春 130025; 江苏理工学院汽车与交通工程学院,江苏常州 213001;江苏理工学院汽车与交通工程学院,江苏常州 213001; 人工智能四川省重点实验室,四川自贡 643000;汽车仿真与控制国家重点实验室,吉林长春 130025; 江苏理工学院汽车与交通工程学院,江苏常州 213001;江苏理工学院汽车与交通工程学院,江苏常州 213001; 人工智能四川省重点实验室,四川自贡 643000【正文语种】中文【中图分类】U463.40 引言主动悬架系统是电动化底盘集成控制系统的关键部件之一,影响汽车行驶的操纵稳定性、平顺性和轮胎接地性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
悬架减震器阻尼力控制的作业
传统的悬架运动主要都是受到路面的激励进行跳动,是被迫运动的。
而主动悬架是通过在悬架中加入电控系统,让悬架实现能够主动的控制悬架运动,化被动为主动,提高整车的操控性和舒适性。
主动悬架中够实现电控的零件,主要是可调稳定杆,可变阻尼减震器,主动液压减震器和空气弹簧。
通过组合这些一系列的电控可调零件,就能组合成不同功能的主动悬架。
实现减震器的阻尼大小和弹簧刚度可以调整。
最终的目的就是通过电控调节悬架零部件,使得悬架系统能够适应不同的工况,提升车辆的舒适性和操控性。
首先我们介绍下用的最多广泛的可变阻尼减震器。
可调阻尼减震器主要的功能就是通过电控方法实现减震器的阻尼变化,而传统的阻尼器中的阻尼特性不可改变。
有时候为了提高舒适性,在一些不平路面我们喜欢减震器的阻尼值相对小一些,这样就不会把太多的震动传递到车身。
如果遇到过弯我们又希望减震器的阻尼值能够大一些,减小车辆侧倾。
传动阻尼器无法兼顾舒适性和操控性,而可变阻尼减震器就能够很好的满足了这个需求。
主动悬架的控制器能够通过车辆传感器检测车辆的状态,然后根据设定好的算法,控制可变阻尼减震器的电流值,实现阻尼的变化。