小型果树移栽机设计
果树机械移植实施方案
果树机械移植实施方案果树机械移植是一项复杂的工程,需要精心设计和周密的实施方案。
在果树移植过程中,我们需要考虑到各种因素,包括果树的种类、生长环境、移植季节等。
本文将从果树机械移植的准备工作、实施步骤和注意事项等方面进行详细介绍。
一、准备工作。
1.果树选择。
在进行机械移植之前,首先需要选择适合机械移植的果树种类。
一般来说,树龄在3-5年的果树适合进行机械移植,因为这个时期的果树根系尚未发育得太过复杂,便于移植后生长。
2.移植地点选择。
移植地点的选择也是非常重要的一步。
需要选择土壤肥沃、排水良好、阳光充足的地方进行移植,以保证果树移植后能够顺利生长。
3.机械设备准备。
在进行果树机械移植之前,需要准备好相应的机械设备,包括挖掘机、运输车辆等。
这些设备需要经过检查和调试,以确保在移植过程中的正常运行。
二、实施步骤。
1.浇水。
在移植前,需要对果树进行充分的浇水,以保证树木的生长状态和根系的湿润。
2.挖掘。
使用挖掘机对果树周围进行挖掘,将果树的根系完整地挖出,并尽量保持根系的完整性。
3.运输。
将挖出的果树根系放置在运输车辆上,注意在运输过程中保持果树根系的湿润和避免剧烈震动。
4.移植。
选择好移植地点后,将果树根系小心地植入土壤中,确保树干垂直,根系完全覆盖。
5.整理。
移植完成后,对果树周围的土壤进行整理,浇水并施肥,以促进果树的生长。
三、注意事项。
1.移植季节选择。
果树的移植季节一般选择在春季和秋季,这两个季节对果树的生长有利,有利于果树的成活。
2.树龄选择。
果树的树龄选择也是非常重要的一点,一般选择3-5年的果树进行机械移植,根系相对较为简单,有利于移植后的生长。
3.移植后的护理。
移植完成后,需要对果树进行精心的护理,包括浇水、施肥、松土等,以保证果树的生长。
通过以上准备工作、实施步骤和注意事项的介绍,我们可以看到果树机械移植是一项复杂而又精密的工程,需要我们在实施过程中严格按照要求进行操作,以确保果树移植后的生长和成活。
一种树苗移栽装置
一种树苗移栽装置树苗是我们绿化环境,美化城市的重要元素之一,它们可以在城市中为人们提供氧气,添置色彩,增加生态平衡。
但是,树苗的移栽是一个比较复杂的过程,需要进行科学的研究和设计。
目前市面上已有的树苗移栽装置存在一些缺陷,如操作不便,移动不灵活,维护难度大等,没有达到理想的效果。
因此,针对这些问题,我们设计了一种新型的树苗移栽装置。
这种移栽装置主要由移动平台、支撑结构、卷筒轴、输送带、机械臂控制系统等几部分组成。
其中,移动平台是一种特殊的形状,可以最大限度的让树苗根系在移动过程中受到保护。
支撑结构由多条支撑杆构成,支撑杆会通过电机带动卷筒轴的转动,让输送带的位置不断改变,并将树苗从土壤中取出、并将它们送到所需的位置。
而机械臂控制系统则是控制整个移栽装置的“大脑”,通过人工操控操作杆来调节机械臂角度,控制器根据角度自动控制机械臂接收或释放树苗,实现拔起与移栽。
具体操作时,先将树苗的根系与周围土壤包覆在一个底盘上,在机械臂的控制下,转动输送带将土壤从底盘上取出,并将根系与土壤保持一定的水平,以免对树苗造成伤害。
同时,输送带与机构臂会协作将树苗移到指定位置,这样,可以将树苗移栽至更适合其生长的地方。
以前传统的树苗移栽装置都只能移栽一颗树苗,需多次移动和重复操作,而这种新型的移栽装置可以一次性将多颗树苗移栽。
整个过程操作比较简单,操作人员只需通过控制操作杆来控制机械臂的伸缩,旋转角度,以及输送带、移动平台的角度,就可在不损害树苗根系的情况下完成移栽工作。
在树苗移栽装置的开发过程中,我们更注重了安全性、稳定性和可维护性。
卷筒轴和支撑结构机构均采用了精湛的机械加工工艺,确保了移动平台耐用性和稳定性的提高。
另外,整个结构也非常轻便,让移动变得简单方便,减少了人力操作,降低了人工劳动成本。
总体而言,此款树苗移栽装置是一种可靠的创新设计,它可以满足城市绿化项目的需求,同时让移栽工作更有效率、简便的完成。
未来,我们将继续进行技术创新和研发,生产出更加智能化的树苗移栽装置,使之成为城市绿色生长的重要组成部分。
面向果树种植管理的低载机器人设计
面向果树种植管理的低载机器人设计果树种植管理是农业生产中的重要环节,传统的种植方式需要大量人力和时间投入,而现代农业已经迎来了智能化、自动化的机器人技术,并在果树种植管理中发挥着越来越关键的作用。
低载机器人是一种特殊设计的机器人,其主要用途是在果树种植过程中提供轻便、灵活的植物管理解决方案。
本文将介绍面向果树种植管理的低载机器人的设计原理、功能特点和未来发展方向。
低载机器人设计的原理基于果树种植管理的特殊需求。
果树生长期需要进行频繁的疏果、修剪、浇水、施肥等工作,传统的人工操作费时费力,而低载机器人可以通过搭载各种专用工具和传感器来实现这些任务。
首先,低载机器人应具备自主导航功能,能够根据果园的地形和目标位置自主移动。
其次,低载机器人应具备植物识别和判断的能力,能够准确识别果树的不同部位和生长情况,以便进行相应的管理措施。
此外,低载机器人还需要具备灵活的机械臂和工具,以便完成各种细致的操作,如疏果、修剪和施肥等。
低载机器人的功能特点主要体现在以下几个方面。
首先,低载机器人具备高效性和精确性。
相比人工操作,低载机器人可以更快速地完成任务,并能够保持一致的质量和效果。
其次,低载机器人具有灵活性和适应性。
通过不同的工具和程序,低载机器人可以适应不同类型的果树和不同的管理需求。
此外,低载机器人还具备可定制性和可升级性。
随着科技的不断进步,低载机器人可以根据用户需求进行升级和改进,以应对不断变化的果树种植管理需求。
最后,低载机器人还具备数据采集和分析功能。
通过搭载传感器和数据处理系统,低载机器人可以收集并分析果树生长的相关数据,为农民提供科学决策依据。
未来,面向果树种植管理的低载机器人还有一些发展方向。
首先,机器人的智能化水平将会不断提高。
随着人工智能和深度学习技术的发展,低载机器人将能够通过自主学习和迭代优化,不断提升自身的识别和判断能力。
其次,机器人的应用范围将会扩大。
除了传统的果树种植管理,低载机器人还可以应用于其他农业领域,如蔬菜种植、茶叶采摘等。
穴盘苗小型电动全自动移栽机的设计
Guo Jianlun,Chen Rong,Ding Jianhua,He Mingsheng,Yang QizhiIn order to solve the problem of low operating efficiency and low survival rate of small semi-automatictransplanter,proposed a new type of automatic acupoint disc seedling transplanter based on small and medium-sized facility agriculture.Firstly,the overall scheme design of the prototype is completed,and the working process of the prototype is described.Then,analyzed the working principle of each component,such as box removal,seedling removal,seedling separation,seedling planting,walking chassis,etc..Designed the concrete structures of key components such as box removal,seedling removal and seedlingseparation.Small and medium-sized facility agriculture,Electric automatic transplanter,Working principle,The structuredesign,Motion sequence穴盘苗小型电动全自动移栽机的设计郭建伦,陈嵘,丁建华,赫明胜,杨启志(江苏大学农业装备工程学院,江苏镇江212013)摘要针对小型半自动移栽机作业效率低,成活率不高的难题,提出一种基于中小型设施农业的新型穴盘苗电动全自动移栽机的设计。
小型果树移栽机设计

前言果业发展是人类生存和社会经济发展的经济基础,一个能够持续发展的果业应该是一个既能满足当前需要又不危后继需求的产业。
因而,随着世界性果业日益发展,节约成本和寻找新移植植方式就摆在了人们的面前。
我国幅员辽阔,具有丰富的土地资源和良好的开发基础。
随着科技的进步,人们生活水平的提高,对果品的消费需求呈增长趋势。
因此发展果业势在必行。
枣业是果业中的一种,在新疆南疆一带种植广泛,但是移栽效率低,我国的移栽技术刚刚处于起步试验阶段,目前仍以人工移栽为主。
人工移栽难以实现大规模种栽植,从而导致生产规模小,生产效益低,不利于移栽技术的推广。
从长远来看,机械化移栽可以实现育苗移栽一体化。
现阶段我国移栽技术发展极不平衡。
我国针对不同的果树及其它作物分别研制了相应的栽植机,由于栽植作业质量与农艺要求还有一定差距,未能大面积推广。
随着林果业种植面积和生产规模的扩大,在有人工作业方式使用,已不能满足林果产业化的步伐。
我国在引进国外技术的基础上开发自己的产品,以缓解劳动力紧张和提高生产效率。
因此枣树移栽机的发展已成为枣树移栽的趋势。
目录1.绪论 (1)1.1课题研究的目的和意义 (1)2.机械化移栽目前存在的问题 (2)2.1移栽前应考虑的因素 (2)2.2移栽过程中应该注意的事项 (3)2.3移栽后的管理与维护 (3)3.设计方案的选择 (4)3.1方案一 (4)3.2方案二 (4)3.3方案三 (6)3.4方案四 (7)4.总体方案的确定 (9)5.小型果树移栽机总体结构的设计 (9)5.1铲斗组件的设计 (9)5.2开合机架的设计 (9)5.3提升机构的设计 (10)5.4提升架的设计 (10)5.5液压装置 (10)6.小型果树移栽机的工作过程 (10)7.挖树机构铲斗的有限元分析 (10)7.1案例一 (10)7.2案例二................................................................................................错误!未定义书签。
2PZ-4000型苹果多功能栽植机设计与试验
2PZ-4000型苹果多功能栽植机设计与试验高光明;宫玉敏;张义胜;周慧;刘琦【摘要】为适应苹果矮砧集约栽培模式所需的新农艺要求,设计了一种苹果多功能栽植机.该机具以拖拉机为动力,采用悬挂式挂接方式,可以实现苹果果苗的垄上定株距栽植,并兼具同步施水(水肥)和镇压功能.针对试验中发现的株距平均值较设计值有所偏移的问题,分析了引起偏移的原因并提出了优化方案.田间试验结果表明,该苹果多功能栽植机起垄垄形一致性为93.8%,栽植合格率为92.4%,3种设计株距下的株距变异系数分别为8.3%、7.9%、4.5%,可以满足新农艺对栽植机具的要求.【期刊名称】《山东理工大学学报(自然科学版)》【年(卷),期】2019(033)002【总页数】8页(P31-37,42)【关键词】苹果;多功能;栽植;起垄;定株距【作者】高光明;宫玉敏;张义胜;周慧;刘琦【作者单位】淄博市农业机械研究所,山东淄博255086;淄博市农业机械研究所,山东淄博255086;淄博市农业机械研究所,山东淄博255086;淄博市农业机械研究所,山东淄博255086;淄博市农业机械研究所,山东淄博255086【正文语种】中文【中图分类】S223.9苹果矮砧集约栽培模式便于实现苹果果园的机械化作业和管理,是苹果生产先进国家普遍采用的栽培模式[1-2],也是我国现代苹果栽培的主要方向[3]。
这种苹果栽培模式正在我国山东、陕西、河北等省的一些地区进行试验和推广,并得到了长足发展[1,4]。
采用这种苹果栽培模式的果园建园时,在农艺方面,对苹果栽植的行距、株距及起垄形状等指标都有一定的要求[1,3,5-6],一些试验和推广地区在参考《苹果矮砧集约栽培模式技术规范》[2]的基础上,还初步形成制定了具体的栽培技术规范(或规程)[3,5]。
目前,适应苹果矮砧集约栽培模式所需新农艺要求的苹果栽植机具研发工作正在展开进行,产生了一些相关机具[7],但见诸文献报道的功能齐全的相关栽植机具很少。
2BYZ-2型钵苗移栽机设计
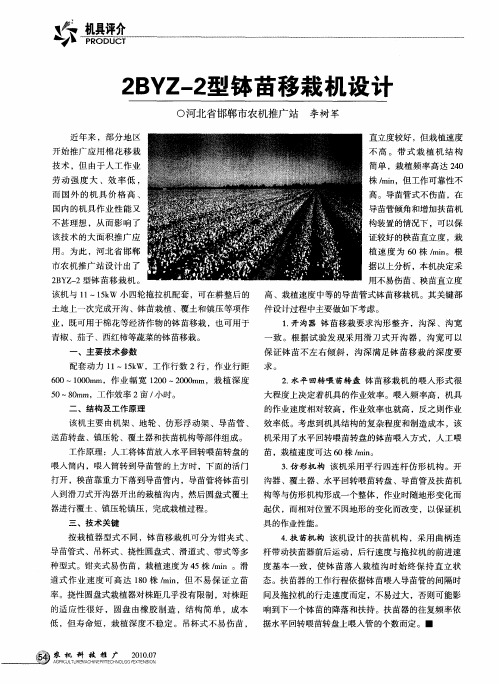
具 的作业性能。
按栽 植器型式不 同 ,钵苗移栽 机可分 为钳夹 式 、
4 扶 苗机构 该机设计 的扶苗机构 ,采用 曲柄连 .
导苗管式 、吊杯式 、挠性 圆盘式 、滑道式 、带式等多 杆带动扶苗器前后运动 ,后 行速度与拖拉机 的前进速 种型式 。钳夹式 易伤 苗 ,栽 植速度为 4 株 / i 。滑 度基 本一 致 ,使 钵 苗落入 栽植 沟 时始终 保持 直 立状 5 mn
业 ,既可用于棉花等经济作物的钵苗移栽 ,也可用 于
青椒 、茄子 、西红柿等蔬菜的钵苗移栽 。
一 一
1 开沟器 钵 苗移栽 要求 沟形整齐 ,沟深 、沟 宽 .
致 。根据试 验发 现采 用滑 刀式 开沟 器 ,沟宽 可 以
、
主要技术参数
保 证钵苗 不左 右倾 斜 ,沟深 满足钵 苗移 栽 的深度 要
高。导苗管式不伤苗 ,在 导苗管倾角和增加扶苗机 构装置 的情况下 ,可以保 证较好 的秧苗直立度 ,栽 植速度为 6 0株 / i。根 mn
劳 动强 度 大 、效 率 低 ,
而 国外 的机 具 价 格 高 、 国 内的机 具作业 性 能又
不 甚理想 ,从 而影 响了 该 技术 的大面积 推广应
大程度上决定着 机具 的作业效 率。喂人频 率高 ,机具 的作业 速度相对 较高 ,作业效 率也 就高 ,反 之则作业
机采用 了水平 回转 喂苗转盘 的钵苗喂人 方式 ,人工 喂
该机 主要 由机架 、地轮 、仿形 浮动架 、导苗 管 、 效 率低 。考虑 到机具结 构的复杂程度 和制造 成本 ,该
低 ,但 寿命短 ,栽植 深度不稳 定 。吊杯式不 易伤苗 , 据水平 回转喂苗转盘上喂人管 的个数而定 。■
吊篮式移栽机毕业设计(CAD图纸)

吊篮式移栽机毕业设计(CAD图纸)————————————————————————————————作者:————————————————————————————————日期:Qq:1269408632目录摘要 (4)abstract (4)1.移栽机械的国内外现状 (5)1。
1移栽机类型及特点 (5)1。
2 移栽机工作部件及栽植原理 (5)1. 2。
1钳夹式移栽机 (5)1。
2。
2 挠性圆盘式移栽机 (5)1. 2. 3 吊篮式移栽机 (5)1. 2. 4 导苗管式移栽机 (5)1. 2。
5 鸭嘴式移栽机 (6)1。
3移栽技术的发展现状 (6)1.4取苗机构的研究进展 (6)1。
5 送苗机构的研究进展 (7)1. 6栽植机构的研究进展 (7)1.7我国移栽机发展存在的问题及发展方向 (7)2. 吊篮式移栽机旋转杯式喂苗机构特点 (8)2。
1旋转杯式喂苗机构特点 (8)2.2 主要工作部件的结构特点及作用 (8)2。
2.1 苗杯 (9)2.2.2 槽轮机构 (10)2。
2.3 传动机构 (11)3.轴的校核 (12)3.1Ⅰ轴的设计计算 (12)3。
1.1材料的选择及轴颈的确定 (12)3.1.2确定各轴段直径 (13)3。
1.3各轴段的长度 (13)3。
1。
4 轴承的校核 (14)3.1.5与联轴器的连接轴的键的设计与校核 (14)3。
2 Ⅱ轴的设计计算 (14)3。
2.1轴径的确定 (15)3。
2.2各轴段长度的确定 (15)3。
2。
3 轴承的校核 (16)3.2.4键的选择与校核 (16)3。
3 Ⅲ轴的设计 (17)3。
3.1轴径的确定 (17) (17)3.3.2各轴段直径的确定 (17)3.3。
3各轴段长度的确定 (18)3.3。
4轴承的校核 (18)3。
3.5 联轴器的选择 (19)4。
润滑与密封的设计 (19)4。
1润滑设计 (20)4.2 密封设计 (20)5. 机架设计与说明 (20)5.1箱体的设计 (20)5.2 箱盖顶部外表面轮廓的确定 (20)5.3齿轮1处的箱盖顶部外表面轮廓的确定 (20)5.4底座凸缘厚度 (21)5。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前言果业发展是人类生存和社会经济发展的经济基础,一个能够持续发展的果业应该是一个既能满足当前需要又不危后继需求的产业。
因而,随着世界性果业日益发展,节约成本和寻找新移植植方式就摆在了人们的面前。
我国幅员辽阔,具有丰富的土地资源和良好的开发基础。
随着科技的进步,人们生活水平的提高,对果品的消费需求呈增长趋势。
因此发展果业势在必行。
枣业是果业中的一种,在新疆南疆一带种植广泛,但是移栽效率低,我国的移栽技术刚刚处于起步试验阶段,目前仍以人工移栽为主。
人工移栽难以实现大规模种栽植,从而导致生产规模小,生产效益低,不利于移栽技术的推广。
从长远来看,机械化移栽可以实现育苗移栽一体化。
现阶段我国移栽技术发展极不平衡。
我国针对不同的果树及其它作物分别研制了相应的栽植机,由于栽植作业质量与农艺要求还有一定差距,未能大面积推广。
随着林果业种植面积和生产规模的扩大,在有人工作业方式使用,已不能满足林果产业化的步伐。
我国在引进国外技术的基础上开发自己的产品,以缓解劳动力紧张和提高生产效率。
因此枣树移栽机的发展已成为枣树移栽的趋势。
目录1.绪论 (1)1.1课题研究的目的和意义 (1)2.机械化移栽目前存在的问题 (2)2.1移栽前应考虑的因素 (2)2.2移栽过程中应该注意的事项 (3)2.3移栽后的管理与维护 (3)3.设计方案的选择 (4)3.1方案一 (4)3.2方案二 (4)3.3方案三 (6)3.4方案四 (7)4.总体方案的确定 (9)5.小型果树移栽机总体结构的设计 (9)5.1铲斗组件的设计 (9)5.2开合机架的设计 (9)5.3提升机构的设计 (10)5.4提升架的设计 (10)5.5液压装置 (10)6.小型果树移栽机的工作过程 (10)7.挖树机构铲斗的有限元分析 (10)7.1案例一 (10)7.2案例二................................................................................................错误!未定义书签。
7.3案例三................................................................................................错误!未定义书签。
7.4案例四................................................................................................错误!未定义书签。
7.5案例五................................................................................................错误!未定义书签。
8.液压传动系统结构.................................................................................错误!未定义书签。
8.1液压传动系统的作用........................................................................错误!未定义书签。
8.2液压传动系统的组成........................................................................错误!未定义书签。
8.3液压基本回路图................................................................................错误!未定义书签。
8.4液压传动系统的工作原理................................................................错误!未定义书签。
8.5液压泵................................................................................................错误!未定义书签。
8.5.1液压泵的基本原理.........................................................................错误!未定义书签。
8.5.2液压泵的工作特点.........................................................................错误!未定义书签。
8.6液压缸................................................................................................错误!未定义书签。
8.6.1液压缸的结构.................................................................................错误!未定义书签。
9.技术经济性分析......................................................................................错误!未定义书签。
10.结论..........................................................................................................错误!未定义书签。
致谢.................................................................................................................错误!未定义书签。
参考文献........................................................................................................错误!未定义书签。
1.绪论1.1课题研究的目的和意义果树在栽植过程中都是沿用传统的人工栽植的方法,传统栽植法劳动力大、强度大,机器的机动性、适应性低,能耗高、效率较低等问题。
要实现由传统栽植技术向现代栽植技术的转变。
需因地制宜,大力发展果树栽植机械化。
为了充分利用资源减少自然灾害,争取高产,机械化移栽是有效途径。
这样可以解决人工栽植过程中的栽植劳动强度大,所需劳动力较多,产品粗大笨重,成本高、效率低,质量难以保证的问题。
红枣种植过程机械化程度的提高,大大降低了劳动强度,大量解放劳动生产力向二三产业转移,有助于农村城市化、工业化,对提高农民素质和生活质量,实现农业现代化具有重要的作用。
红枣生产中的移栽是果树抚育机械之一,是实现枣业全程机械化的一个重要一环。
因此移栽机研究的目的毋庸置疑。
生态果业机械化发展已经步入新的历史起点,生态果业机械化作为发展现代化农业的主要内和主要标志,适合地区生产需要的栽植机植种类较少、单一,科技含量不高,不能满足果业生产发展的要求。
因此在此大好的趋势之下发展小型果树移栽机是非常有意义的。
1.2国内外研究现状分析[1]国内对农作物的机械化育苗移栽技术的研究早在20世纪50年代未60年代初就已经开始。
由于没有突破育苗移栽机械化过程中的技术难题,使这一技术搁浅。
近年来由于农业生产的发展,新技术、新工艺的出现,为移栽机具的发展提供了很好的发展前景,20世纪80年代以后近年来由于农业生产的发展,移栽机具发展迅速,从不到l000台上升到将近8000台。
东北等大型农场多采用工厂化营养钵苗和机械化栽植技术,总体水平相对较高。
我国长期以来,树苗移植一直沿用传统的手工劳动方式,劳动强度大,生产效率低。
由于果树移植面积的增加和农村劳动力的转移,移栽技术落后、效率低已成为果树增产的制约因素,果树移栽自动化和机械化已成为农民越来越迫切的要求。
与水稻、玉米、小麦生产机械化发展速度相比,果树移栽机械化的发展速度比较缓慢。
这种状况与当前加快实现农业现代化的形式要求不适应。
有关资料显示,美国、法国、英国和日本等国在自动移栽机的研制方面均取得了很大的成绩。
我国从在20世纪60年代开始研制移栽机,初期主要用来移栽棉花和玉米等作物,我国在这方面的研究起步晚,技术进步缓慢,目前整体技术水平还比较低。
植树造林方面的机械也是很少,我国于1953年开始引进移栽植树机,在东北地区西部营造防护林。
1960年开始设计和制造拖拉机牵引式半自动投苗植树机。
为了适应沙区防风固沙植树造林的要求,国家不断投资科研经费来研制植树机,2001年研制成功的深栽造林钻孔机在我国西部、尤其是在干旱和半干旱地区植树具有广阔和特殊的应用前景。
2001年填补我国机械化造林空白的新型液压植树机(JYZ-80)在内蒙古达拉特旗白土梁林场研制成功并批量投入生产。
这种植树机由履带式拖拉机牵引,采用液压系统调节耕深,开沟深度随意调节,最大开沟深度为80cm,主要适用于沙区、荒漠地区栽植带根苗、扦插苗、沙柳等。
我国的移栽技术刚刚处于起步试验阶段,目前仍以人工移栽为主。
人工移栽难以实现大规模种栽植,从而导致生产规模小,生产效益低,不利于移栽技术的推广。
从长远来看,机械化移栽可以实现育苗移栽一体化。
现阶段我国移栽技术发展极不平衡。
我国针对不同的果树及其它作物分别研制了相应的移栽机,由于移栽作业质量与农艺要求还有一定差距,未能大面积推广。
随着林果业种植面积和生产规模的扩大,在有人工作业方式使用,已不能满足林果产业化的步伐。
我国在引进国外技术的基础上开发自己的产品,以缓解劳动力紧张和提高生产效率。
在我国,果树的栽植具有季节性和区域性特点,机具作业时间短,单一性能机具的年使率降低,因此在今后的设计中,应尽量考虑一机多用的问题。
具体要改进的措施:一是研制适用不同的土壤条件和工作条件的机具;二是设计通用机架,在更换其他工作部件后即可完成其他果树林作业项目,提高其使用率和互换性;三是要考虑人机的工程学原理,要让人舒服,健康的工作,提高安全性能。
现在我们国家的移栽技术还不够成熟,好多还是借鉴他国的,单一的机械不能通用到其他地区的工作,有待机械多样性,不仅能够适用种植果树苗还要适用其他的树种,更要发展到植树造林的机械上一样可以通用。
种种的原因、地理位置及技术条件证明我们加大力度发展机械化势在必行。