四旋翼微型飞行器设计
四翼飞行器设计最新版 (1)

四旋翼飞行器设计飞行器设计小组组员:李阳,张响,马具彪,袁学松指导老师:李培目录一四旋翼飞行器的发展背景 (3)二四旋翼飞行器结构 (4)三工作原理 (6)1 四旋翼飞行器工作原理概述 (6)2四旋翼飞行器运动状态 (6)四零件数据详情 (12)五外观设计 (14)六内部设计 ............................................................错误!未定义书签。
七四翼飞行器组装基本步骤 . (19)八特点及其应用 (23)1.飞行器的功能特点 (23)2.飞行器的运用 (23)3.未来前景 (23)九参考文献 (24)一四旋翼飞行器的发展背景四旋翼飞行器属飞行器的一种,属于人工智能与自动化机器的一种。
在当今社会中,因体积小,功能多,而广泛使用。
但由于构造复杂不易操作等原因,四旋翼飞行器的发展一直比较缓慢。
近年来,由于新型材料、飞控技术的发展,微型四旋翼飞行器的发展非常迅速。
南京航空航天大学研究出飞行器理论和数学建模,模糊控制等技术,促进了我国飞行器的发展。
北京航空航天大学自主掌握共轴双翼机的自主控制与研发工作。
浙江大学,清华大学研究出,机载GPS和数学建模机器人视觉。
在国家的指导与鼓励下,很多所高校,积极响应,促进了我国四旋翼飞行器的发展。
国外已经对四旋翼飞行器做了大量研究,起步比国内早很多。
在导航,自主飞行技术等方面领先国内。
国外已经把飞行器广泛运用在军事勘察,工业监测,农业预防等多方面。
二四旋翼飞行器结构四旋翼飞行器共有四个翼,均匀分布在前后左右,且四旋翼均在同平面内,左右上下完全对称。
每个旋翼下都附有一个发动机,以提供动力。
在飞行器的中心是一个飞行控制器,来控制飞行器的速度和方向。
结构形式以及三视图如图1.1、图1.2所示。
图1.1四旋翼飞行器结构图主视图俯视图图1.2四旋翼飞行器三视图三工作原理飞行器是通过调节四个电机转速来改变机翼转速,实现升降的变化,进而控制飞行器的姿态。
小型四旋翼低空无人飞行器综合设计

小型四旋翼低空无人飞行器综合设计小型四旋翼低空无人飞行器综合设计一、引言近年来,随着科技的不断发展,无人飞行器成为了航空领域的热门研究课题。
小型四旋翼低空无人飞行器因其灵活性和机动性而备受关注。
本文旨在综合设计一种小型四旋翼低空无人飞行器,并对其关键设计问题进行探讨。
二、设计目标本次设计的小型四旋翼低空无人飞行器的设计目标如下:1. 具备良好的悬停稳定性,能够在低空进行稳定的悬停飞行;2. 具备较高的操控能力,能够完成复杂的机动动作;3. 具备一定的荷载能力,能够搭载各种传感器或设备,以实现不同应用场景的需求;4. 具备良好的安全性,能够应对紧急情况并自动返航。
三、机构设计1. 旋翼设计:选择合适的旋翼叶片尺寸、扭矩和旋翼转速,以实现所需的升力和推力,并保证飞行器的稳定性和机动性。
2. 机身设计:考虑到飞行器的结构强度和重量的平衡,使用轻质且强度高的材料,以实现飞行器的结构刚度和稳定性。
3. 电机设计:根据所需的推力和转速要求,选择合适的电机,并配置相应的驱动和控制系统。
四、控制系统设计1. 姿态控制:采用惯性测量单元(IMU)获取飞行器的姿态信息,通过PID控制算法实现稳定的悬停飞行和精确的操控。
2. 导航系统:利用全球定位系统(GPS)和陀螺仪传感器获取飞行器的位置和速度信息,实现精确的导航和定位。
3. 通信系统:设计一套可靠的数据传输系统,将飞行器采集到的数据传输到地面控制器,并接收指令以实现远程操控。
4. 紧急情况处理:设计一套自主判断机制,当飞行器遇到故障或紧急情况时,能够自动触发返航程序,确保飞行器的安全。
五、能源系统设计1. 电源选择:根据需求选择合适的电池类型和容量,以提供飞行器所需的电力。
2. 能效优化:通过优化电机和电子元件的功耗,减少能源的消耗,延长飞行器的续航时间。
3. 充电系统:设计一套快速充电系统,以提高电池的充电效率和充电速度,减少充电时间。
六、飞行器性能测试设计完成后,对飞行器进行性能测试,验证其实际飞行性能和稳定性。
小型四旋翼低空无人飞行器综合设计

3、传感器应用
传感器技术在小型四旋翼低空无人飞行器中扮演着重要的角色。通过使用多种 传感器,可以实现飞行器的定位、导航、控制等功能。为了保证数据的准确性 和可靠性,需要对传感器进行定期校准和维护。
实验结果与分析
通过仿真实验,本次演示提出的混合控制方法取得了显著的实验效果。在轨迹 跟踪实验中,飞行器能够快速准确地跟踪给定的轨迹,具有良好的动态性能和 稳定性。此外,通过与单一控制方法的对比实验,本次演示提出的混合控制方 法在跟踪精度和稳定性方面均表现出明显的优势。
结论与展望
本次演示针对四旋翼无人飞行器的非线性控制问题,提出了一种基于鲁棒控制 和滑模控制的混合控制方法。通过仿真实验验证了该方法的有效性。然而,仍 然存在一些不足之处,例如对飞行器的动态特性分析不够准确、控制系统的实 时性有待提高等。
设计思路
1、总体设计
小型四旋翼低空无人飞行器主要由机身、旋翼、遥控器等部分组成。机身采用 轻量化材料制成,以减小飞行器的重量,便于携带;旋翼则由四个电机驱动, 以实现飞行器的稳定飞行;遥控器则用于控制飞行器的飞行轨迹和高度。
2、硬件设计
硬件配置是小型四旋翼低空无人飞行器的核心部分,主要包括电池、传感器、 遥控设备等。电池选用高容量、轻量化的锂离子电池,以延长飞行器的续航时 间;传感器则采用GPS、加速度计、陀螺仪等,以实现飞行器的定位、导航和 控制;遥控设备则选用2.4GHz遥控器,以实现遥控设备的无线传输。
小型四旋翼低空无人飞行器综 合设计
01 引言
03 参考内容
目录
基于STM32的四旋翼飞行器设计
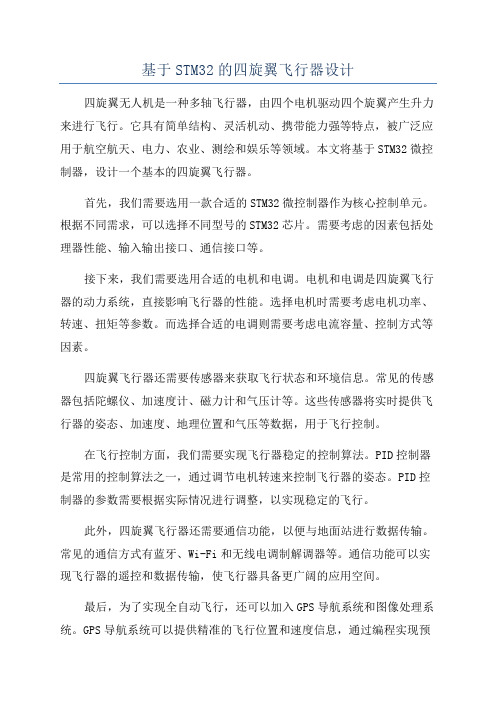
基于STM32的四旋翼飞行器设计四旋翼无人机是一种多轴飞行器,由四个电机驱动四个旋翼产生升力来进行飞行。
它具有简单结构、灵活机动、携带能力强等特点,被广泛应用于航空航天、电力、农业、测绘和娱乐等领域。
本文将基于STM32微控制器,设计一个基本的四旋翼飞行器。
首先,我们需要选用一款合适的STM32微控制器作为核心控制单元。
根据不同需求,可以选择不同型号的STM32芯片。
需要考虑的因素包括处理器性能、输入输出接口、通信接口等。
接下来,我们需要选用合适的电机和电调。
电机和电调是四旋翼飞行器的动力系统,直接影响飞行器的性能。
选择电机时需要考虑电机功率、转速、扭矩等参数。
而选择合适的电调则需要考虑电流容量、控制方式等因素。
四旋翼飞行器还需要传感器来获取飞行状态和环境信息。
常见的传感器包括陀螺仪、加速度计、磁力计和气压计等。
这些传感器将实时提供飞行器的姿态、加速度、地理位置和气压等数据,用于飞行控制。
在飞行控制方面,我们需要实现飞行器稳定的控制算法。
PID控制器是常用的控制算法之一,通过调节电机转速来控制飞行器的姿态。
PID控制器的参数需要根据实际情况进行调整,以实现稳定的飞行。
此外,四旋翼飞行器还需要通信功能,以便与地面站进行数据传输。
常见的通信方式有蓝牙、Wi-Fi和无线电调制解调器等。
通信功能可以实现飞行器的遥控和数据传输,使飞行器具备更广阔的应用空间。
最后,为了实现全自动飞行,还可以加入GPS导航系统和图像处理系统。
GPS导航系统可以提供精准的飞行位置和速度信息,通过编程实现预设航点飞行。
图像处理系统可以通过摄像头获取实时图像,并进行目标识别和跟踪,实现智能飞行等功能。
综上所述,基于STM32的四旋翼飞行器设计需要考虑微控制器选型、电机电调选择、传感器使用、飞行控制算法、通信功能等方面。
通过合理的设计和编程,可以实现一个功能齐全、性能稳定的四旋翼飞行器。
微型四旋翼飞行器的系统设计
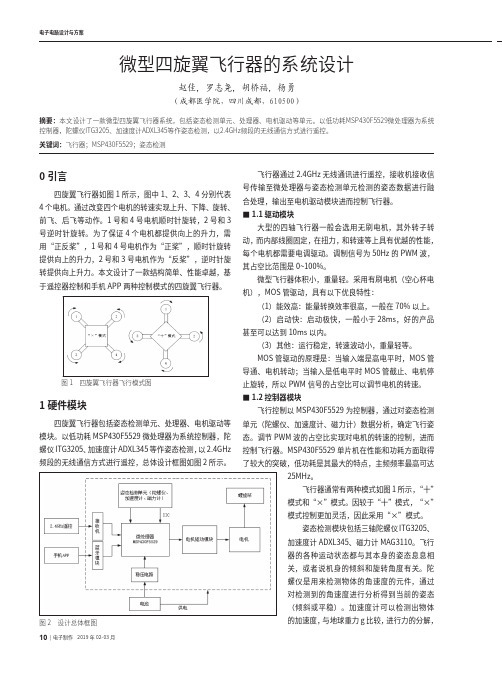
10 | 电子制作 2019年02-03月用“正反桨”,1号和4号电机作为“正桨”,顺时针旋转提供向上的升力,2号和3号电机作为“反桨”,逆时针旋转提供向上升力。
本文设计了一款结构简单、性能卓越,基于遥控器控制和手机APP 两种控制模式的四旋翼飞行器。
图1 四旋翼飞行器飞行模式图1 硬件模块四旋翼飞行器包括姿态检测单元、处理器、电机驱动等模块。
以低功耗MSP430F5529微处理器为系统控制器,陀螺仪ITG3205、加速度计ADXL345等作姿态检测,以2.4GHz 频段的无线通信方式进行遥控,总体设计框图如图2所示。
动,而内部线圈固定,在扭力,和转速等上具有优越的性能,每个电机都需要电调驱动。
调制信号为50Hz 的PWM 波,其占空比范围是0~100%。
微型飞行器体积小,重量轻。
采用有刷电机(空心杯电机),MOS 管驱动,具有以下优良特性:(1)能效高:能量转换效率很高,一般在70%以上。
(2)启动快:启动极快,一般小于28ms,好的产品甚至可以达到10ms 以内。
(3)其他:运行稳定,转速波动小,重量轻等。
MOS 管驱动的原理是:当输入端是高电平时,MOS 管导通、电机转动;当输入是低电平时MOS 管截止、电机停止旋转,所以PWM 信号的占空比可以调节电机的转速。
■1.2 控制器模块飞行控制以MSP430F5529为控制器,通过对姿态检测单元(陀螺仪、加速度计、磁力计)数据分析,确定飞行姿态。
调节PWM 波的占空比实现对电机的转速的控制,进而控制飞行器。
MSP430F5529单片机在性能和功耗方面取得了较大的突破,低功耗是其最大的特点,主频频率最高可达25MHz。
飞行器通常有两种模式如图1所示,“十”模式和“×”模式。
因较于“十”模式,“×”模式控制更加灵活,因此采用“×”模式。
姿态检测模块包括三轴陀螺仪ITG3205、加速度计ADXL345、磁力计MAG3110。
微型四旋翼控制系统设计

微型四旋翼控制系统设计0 前言无人飞行器(UAV)自主飞行技术多年来一直是航空领域研究的热点,并且在实际应用中存在大量的需求,例如:侦察与营救任务,科学数据收集,地质、林业勘探,农业病虫害防治,以及视频监控,影视制作等。
通过无人飞行器来完成上述任务可以大大降低成本和提高人员安全保障。
无人飞行器的主要优点包括:系统制造成本低,在执行任务时人员伤害小,具有优良的操控性和灵活性等。
而旋翼式飞行器与固定翼飞行器相比,其优势还包括:飞行器起飞和降落所需空间少,在障碍物密集环境下的可控性强,以及飞行器姿态保持能力高。
由国际无人运输系统协会(International Association for Unmanned Vehicle Systems)组织的一年一度的国际空中机器人竞赛(International Aerial Robotics Competition),为自主旋翼式飞行器的应用潜力研究提供了一个很好的展示平台。
该竞赛吸引了来自全世界不同国家研究团队的参与,来完成预先设定的自主飞行任务。
在无人飞行器自主飞行的众多技术当中,飞行器自主飞行控制算法的设计一直是控制领域众多研究者最关心的问题之一。
经典的控制策略在飞行器系统的某个特定作用点上往往首先将系统模型线性化,然后在此基础上运用经典控制理论对系统进行分析和控制,控制精度和控制能力偏弱。
相比之下,运用现代非线性控制理论设计的控制算法,其性能明显优于经典控制算法。
小型四旋翼飞行器与其它飞行器相比,其优势在于其机械结构较为简单,并且只需通过改变四个马达的转速即可实现控制,且飞行机动能力更加灵活。
另一方面,小型四旋翼飞行器具有较高的操控性能,并具有在小区域范围内起飞,盘旋,飞行,着陆的能力。
飞行器可以飞至离目标更近的区域,而不像传统直升机由于其巨大的单旋翼而不能近距离靠近目标。
同时,小型四旋翼飞行器研究也为自动控制,先进传感技术以及计算机科学等诸多领域的融合研究提供了一个平台。
基于反步法的小型四旋翼无人飞行器飞行控制系统研究与设计
摘要小型四旋翼无人飞行器由于具有精确悬停、垂直起降以及机械结构简单等特点,已经成为众多研究机构的研究热点,无论是在军事领域,还是在民用领域,四旋翼无人机都有着广泛的应用。
由于四旋翼无人飞行器是一个具有6自由度和4个控制输入的欠驱动系统,其数学模型具有强耦合、非线性、多变量等特点,以及建模不精确和外部干扰等不确定因素,均使得飞行控制复杂化。
因此本文以反步法为基础,结合不同策略,研究与设计了四旋翼飞行器的控制系统,并利用仿真实验验证与分析了所设计系统的飞行性能。
首先,将四旋翼无人飞行器看作刚体,选取合适的坐标系,分析了四旋翼无人飞行器空气动力学特性和飞行原理,在此基础上,推导并建立四旋翼飞行器的数学模型。
其次,在不考虑不确定因素的情况下,详细分析了基于反步法的四旋翼无人飞行器飞行控制系统的设计。
设计过程中,将四旋翼的控制系统结构分为位置环路和姿态环路分别进行设计。
接着,针对飞行器姿态环路存在复合干扰的情况下,论文采用了基于反步法和RBF神经网络的控制策略。
利用RBF神经网络对任意非线性连续函数具有逼近的特点,在控制系统设计过程中在线估计出复合干扰,同时对于逼近误差进行了补偿。
最后,针对在位置和姿态环路均存在复合干扰的情况下,论文采用了基于反步法和ESO的控制策略。
为避免反步设计过程中出现“微分爆炸”现象,提出了动态面策略,以及为提高系统鲁棒性,采用了滑模面;为减轻控制系统的复杂计算,对于系统中出现的复合干扰项,提出了ESO方法对其在线实时估计,并在控制律设计中实时补偿。
关键词:四旋翼无人飞行器,反步法,RBF神经网络,扩张状态观测器,复合干扰,轨迹跟踪ABSTRACTDue to its advantages such as precise hovering, vertical taking off and landing (VTOL), and simple mechanical structure, the quadrotor unmanned aerial vehicle(UA V) has become hotspot in the unmanned aerial vehicle area, and whether in the military field or in the field of civil, the vehicle has been widely used. The vehicle is a typical uneractuated system, and it has six degrees of freedom and four control input. The mathematical model has the characteristics of strong coupling, nonlinear, multivariable, and modeling imprecision and uncertainty factors such as external disturbance, are complicated flight control. So this paper adopts control method based on the backstepping to study and design the flight control system of the vehicle and through the simulation to the control system analysis and verification.Firstly, this paper takes the vehicle as a rigid body, selects the appropriate coordinate system, and analyzes the aerodynamic characteristic and the flying principle. On this basis, the mathematical model of the vehicle is derivated and established.Secondly, without considering various uncertain factors, this paper introduces in detail the flight control system design based on the backstepping. In the design process, the whole control structure can be divided into position loop control and attitude loop to design respectively.Thirdly, for the aircraft attitude loop under the existence of the compound disturbance, this paper adopts the backstepping and RBFNN strategy. Using the characteristic of the RBFNN to approximate arbitrary nonlinear continuous function to estimate the compound disturbance online and compensate the approximation error. The controller can guarantee the vehicle to track the desired trajectory.Finally, for the position loop and attitude loop under the existence of the compound disturbance, this paper adopts the backstepping and RBFNN strategy. For avoiding the complex calculation, the interference is observed by ESO online and the algorithm composites the interference in the control law. For avoiding the problem of “explosion of terms” in backstepping control and improving the robust, the dynamic surface control method and the sliding mode surface are applied to design the controller.KEY WORDS:Quadrotor Unmanned Aerial Vehicle, Backstepping, Netural Network, Extended State Observer, Compound Interference, Trajectory Tracking目录摘要 (I)ABSTRACT .................................................................................................................. I I 第1章绪论 (1)1.1 论文的研究背景与意义 (1)1.2 四旋翼飞行器的国内外研究现状 (2)1.2.1 四旋翼飞行器的应用研究现状 (2)1.2.2 四旋翼飞行器的控制算法研究现状 (8)1.3 论文主要内容与论文结构 (9)第2章小型四旋翼无人飞行器的建模 (11)2.1 四旋翼飞行器的机体结构和飞行原理 (11)2.1.1 四旋翼飞行器的机体结构 (11)2.1.2 四旋翼飞行器的飞行原理 (12)2.2 四旋翼飞行器的数学模型 (12)2.2.1 坐标系分析 (13)2.2.2 四旋翼飞行器的空气动力和力矩分析 (14)2.2.3 四旋翼飞行器的位置子系统模型 (15)2.2.4 四旋翼飞行器的姿态子系统模型 (15)2.3 本章小结 (16)第3章基于反步法的小型四旋翼无人飞行器飞行控制系统设计 (17)3.1 反步法基本概念 (17)3.1.1 李雅普诺夫稳定性 (17)3.1.2 反步法及其稳定性 (18)3.2 四旋翼飞行器飞行控制系统设计 (20)3.2.1 姿态回路控制律设计 (22)3.2.2 位置回路控制律设计 (23)3.3 仿真分析 (24)3.4 本章小结 (27)第4章基于反步法和RBFNN的小型四旋翼无人飞行器飞行控制系统设计 (29)4.1 RBF神经网络基本概念 (29)4.1.1 RBF神经网络结构 (30)4.1.2 RBF神经网络的逼近 (31)4.2 四旋翼飞行器飞行控制系统设计 (32)4.2.1 位置环路控制律设计 (34)4.2.2 姿态环路控制律设计 (35)4.3 仿真分析 (38)4.4 本章小结 (40)第5章基于反步法和ESO的小型四旋翼无人飞行器飞行控制系统设计 (43)5.1 扩张状态观测器(ESO)以及相关基础知识 (44)5.1.1 ESO的设计及其误差有界性分析 (44)5.1.2 动态面策略 (46)5.2 四旋翼飞行器飞行控制系统设计 (47)5.2.1 位置环路控制律设计 (48)5.2.2 姿态环路控制律设计 (49)5.3 仿真分析 (52)5.4 本章小结 (55)第6章总结与展望 (57)6.1 论文总结 (57)6.2 论文展望 (58)参考文献 (59)发表论文和科研情况说明 (63)致谢 (65)第1章绪论第1章绪论在本章中首先简单描述了四旋翼无人飞行器的研究背景和意义,其次简单介绍了四旋翼无人机的发展历程以及目前的发展现状,最后概述了本论文的内容安排和论文的结构安排。
四旋翼飞行器设计资料
四旋翼飞行器的设计查重98%四旋翼微型飞行器是一种以4个电机作为动力装置.通过调节电机转速来控制飞行的欠驱动系统;为了实现四旋翼微型飞行器的自主飞行控制,对飞行控制系统进行了初步设计,并且以C8051F020单片机为计算控制单元,给出了飞行控制系统的硬件设计,研究了设计中的关键技术;由于采用贴片封装和低功耗的元器件,使飞行器具有重量轻、体积小、功耗低的优点;经过多次室内试验,该硬件设计性能可靠,能满足飞行器起飞、悬停、降落等飞行模态的控制要求.一.微小型四旋翼飞行器的发展前景根据微小型四旋翼飞行器发展现状和相关高新技术发展趋势,预计它将有以下发展前景。
1 )随着相关研究进一步深入,预计在不久的将来小型四旋翼飞行器技术会逐步走向成熟与实用。
任务规划、飞行控制、无 G P S 导航、视觉和通信等子系统将进一步健全和完善,使其具有自主起降和全天候抗干扰稳定飞行能力。
它未来的主要技术指标:任务半径 5 k m,飞行高度 1 0 0 m,续航时间 1 h ,有效载荷约 5 0 0 g ,完全能够填补目前国际上在该范围内侦察手段的空白。
2 )未来的微型四旋翼飞行器将完全能够达到美国国防预研局对 M A V基本技术指标的要求。
随着低雷诺数空气动力学研究的深入,以及纳米和 M E MS 技术的发展,四旋翼 M A V必然取得理论和工程上的突破。
它将是一种有 4个旋翼的可飞行传感器芯片,是一个集成多个子系统 ( 导航与控制、动力与能源、任务与通信等子系统) 的高度复杂ME M S系统;不但能够在空中悬停和向任意方向机动飞行,还能飞临、绕过甚至是穿过目标物体。
此外,它还将拥有良好的隐身功能和信息传输能力。
3 )微小型四旋翼飞行器的编队飞行与作战应在未来的战争中,微小型四旋翼飞行器的任务之一将是对敌方进行电子干扰并攻击其核心目标。
单个微小型飞行器的有效载荷量毕竟有限,难以有效地完成任务,而编队飞行与作战不仅可以极大地提高有效载荷量,还能够增强其突防能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
the weight of which is 22 grams.7Ihe Micro Air Vehi‘!le can peIfo珊venical takeoff,landing and hovering,which
r—i————i————i———T g:29z/√蕊+譬i+呸+菇
(12)
,沙=^a:rc。tan。I_胁『仁_—!—!!丁鱼—±—!了!!—!1、I1. ‘
川’ q1,j =9】 3j/ ̄V/】蠢u +g1:‘ +g;+g;
臼=arcsin(2(q092一q193))
(9)
咖…an(慧餮黠)
图4互补滤波器原理示意图
场效应管ll l场效应管2¨场效应管3l|场效应管 电机1 l l电机2 ll电机3 Il电机4 图3飞行器系统结构图
(4)可以求得(m引m。,m;。).再由(6)可以解得初
刚篓臼蒜蕊㈣
3 姿态解算
要对微型飞行器进行控制,首先要得到飞行器 的当前姿态.姿态解算需要从姿态测量系统得到原 始测量数据.首先获取初始姿态,然后使用四元数算 法进行姿态更新,再将四元数转换为欧拉角,通过互 补滤波器进行姿态矫正,最后将矫正后的欧拉角转 换为四元数并将其规范化,进行下一次的姿态更新. 3.1初始姿态获取
et=6 g+koe。一eg]
9。=咖g+晟(咖。一咖g)
(1U)
吵。=砂g+而(沙。一妒。)
静态时,使用式(3)一(6)计算的欧拉角即可作
is suitable for reconnaissance missions in na玎ow spaces.
Key w坩ds:quad—rotor;Micr0 Air Vehicle;attitude measurement;comp】ementary filter;PID contmller
O引 言
使用欧拉角‘11‘表示姿态,令沙、口和西代表zⅨ
欧拉角,分别称为偏航角、俯仰角和横滚角.载体坐
标系下的加速度(吼。,o…o:。)和参考坐标系下的加 速度(叱。,n。叱。)之间的关系可表示为式(1).其 中c和s分别代表cos和sin.
c口c沙
cps廿
一s口 蛳
一c咖s砂+s吊s口c沙 s咖s沙+c咖s扫c沙
图2四旋翼飞行器动力学模型 四旋翼飞行器产生基本动作的原理为:电机l 和3逆时针旋转驱动两个正桨产生升力,电机2和 4顺时针旋转驱动两个反桨产生升力.反向旋转的 两组电机和桨使其各自对机身产生的转矩相互抵 消,保证4个电机转速一致时机身不发生转动.电机 1和4转速减小(增大),同时电机2和3转速增大 (减小),产生向前(后)方向的运动.电机1和2转 速减小(增大),同时电机3和4转速增大(减小), 产生向左(右)方向的运动.4个电机转速同时增大 (减小)产生向上(向下)的运动.对角线的电机一组 转速增大,另一组转速减小产生自身旋转运动.
间隔.∞矿∞,。和棚:。代表载体坐标系下的角速度,可
q0=q。+(一ql∞。。一q2∞抛一吼∞钮)竽 q1=qI+(口0∞,。+q2∞钟一93∞y。)譬
-
(8)
g:=q:+(q0∞,。一q。∞镭+g,∞,。)等
93=q3+(q0∞砧+q1山y日一92∞;。)!擎
万方数据
第3期
张广玉等:四旋翼微型飞行器设计
飞行器相关硬件包括:①主控制器: STM32F103RBll6,工作频率72 MHz.②姿态测量系 统:双轴陀螺IDG650和单轴陀螺ISZ650,三轴加速 度计和三轴磁力计组合模块LSM303DLHc.③无线 通信模块:2.4 G无线收发模块nR砣4IJDl.④驱动
万方数据
112
哈尔滨理工大’学学报
第17卷第3期 2012年6月
哈尔滨理工大学学报
JOURNAL OF HARRIN UNIVERSITY 0F SCIENCE AND。11ECHNOLoGY
V01.17 No.3 Jun.2012
四旋翼微型飞行器设计
张广玉, 张洪涛, 李隆球, 王 林
(哈尔滨工业大学机电工程学院,黑龙江哈尔滨150001)
Z黝ⅣG Gun,lg一弘,加玢ⅣG胁愕一tno, Ⅳ助增一giu,删^B三流
(sch00l 0f Mechanical and Elec试c Engineedng,Harbin Institllte of Technolo科,Harbin 150001,china)
Abstract:The size of the conventional unmanned aerial vehicle is laI翟_e for night in narrow and small indoor environrnent.A quad·mtor Micm Air Vehicle i8 designed to solve the pmblem.The dynamic model of tlle vehicle is
收稿日期:2叫1—12—28 基金项目:中国博士后科学基金(20¨0491036) 作者简介:张广玉(1962一),男,教授,博士生导师,E-mil:29yqx@硫.edu.c“;
张洪涛(1984一),男,博士研究生.
万方数据
第3期
张广玉等:四旋翼微型飞行器设计
快,续航能力强,比较适合野外区域性侦查等工作. 其典型代表是美国航空环境公司(Aer0Vimnment) 研制的Black widow怛1和洛克希德桑德斯公司 (LDckheed sanders)研制的Microstarp J.旋翼微型飞 行器具有一个或多个旋翼,能够垂直起降和悬停,适 用于狭小空间(如室内)或复杂近地环境中.典型代 表是洛克尼克公司(Lutronix)研制的Kolibri”1和斯 坦福大学研制的Mesicopter”J.扑翼微型飞行器是 一种模仿昆虫或鸟类的新型飞行器,其主要特点是 将举升、悬停和推进功能集成于一体,具有很强的机 动性和灵活性.扑翼微型飞行器控制方式比较复杂, 目前多数机构都处于研究阶段,离实际使用还有一 定的距离.典型代表是加利福尼亚工学院研制的 MicroBat旧1和斯坦福研究中心(SRI)研制的Men. tor¨1.国内也有多家高校开展了微型飞行器的研究 工作,如清华大学,上海交通大学¨J,哈尔滨理工大 学一J,华南理工大学¨驯等.
馈的PID控制器进行姿态控制,无需建立复杂的控制系统模型.该飞行器最大尺寸15 cm,重量22
g,可垂直起降和悬停,适用于狭小空间的侦察任务.
关键词:四旋翼;微型飞行器;姿态测量;互补滤波器;PID控制器
中图分类号:V221
文献标志码:A
文章编号:1007—2683(2012)03~0110—05
Design of Quad-rotor Micro Alr VehicIe
摘要:针对常规无人飞行器尺寸较大,无法适用于室内狭小空间飞行的问题。设计了一种四
旋翼微型飞行器.建立了微型飞行器的动力学模型,介绍了组成飞行器的相关硬件.构建了由三轴
陀螺仪、三轴加速度计和三轴磁力计组成的姿态测量系统,给出了姿态解算的具体步骤.使用了互
补滤波器对陀螺测量误差进行矫正,并给出了互补滤波器融合系数的确定方法.采用基于欧拉角反
plementaI_y fiher is used to correct the ermrs of舒rro measurement. The method of dete册ining the fusion coel矗cient of compIeInentary胁er is given。The attitude eontrol syStem is a PID controller based on Euler angles feedback,
113
使用加速度计和磁力计对其进行矫正.首先使用式 (9)将更新后的四元数转换为欧拉角,然后使用互 补滤波器进行矫正,基本原理如图4所示,其公式表 示为式(10).其中下标g代表由陀螺得到的欧拉
,厅—T—丌 再进行更新操作. 90 2q。7√q。+91+92+q3 g。=g。/√孬了亓了孺
角,下标n代表由加速度计得到的欧拉角,下标e代 表经互补滤波器矫正后的欧拉角估计值.
1 飞行器基本工作原理
四旋翼飞行器是一种由固连在刚性十字交叉结 构上的4个电机驱动的一种飞行器.飞行器动作依 靠4个电机的转速差进行控制,其机械结构相对简 单,可由电机直接驱动,无需复杂的传动装置,便于 微型化.四旋翼飞行器按照旋翼布置方式可分为十 字模式和x模式,如图l所示.对于姿态测量和控 制来说,两种方式差别不大.考虑到可能会使用向前 安装的视觉传感器,为了使视线不被遮挡,本设计使 用x模式布置方式.
装置:4个N沟道场效应管s12302Ds.⑤动作执行装
置:4个直径6咖的空心杯电机,两对直径45Ⅱ衄正
反桨.⑥供电装置:3.7 V/130 mAh锂电池.
阳rctg(焘)
姿态控制指令卜—-—.1无线模块 主控制器
咖:踟tgf坠1
第17卷
㈤
(4)
姿
态
一一一一~一一一
解 算
载体坐标系下的磁场强度(m训m,。,m:。)和参 考坐标系下的磁场强度(m;。,m。,m:,)之间的关系
对于室内狭小空间的侦查任务,需要微型飞行 器具有垂直起降能力,稳定悬停能力以及灵活的机 动性.多旋翼微型飞行器是实现以上功能的理想选 择.本文设计了一种微型四旋翼飞行器,使用三轴陀 螺仪、三轴加速度计和三轴磁力计组成姿态测量系 统,使用四元数算法进行姿态解算,使用互补滤波器 进行数据融合以减小机体振动和陀螺漂移对姿态测 量的影响.该飞行器体积小,重量轻,可垂直起降和 悬停,适用于室内狭小空间的侦查任务.