汽车半悬挂系统建模与分析(现代控制理论大作业)
现代汽车系统控制技术第三章 汽车悬架系统

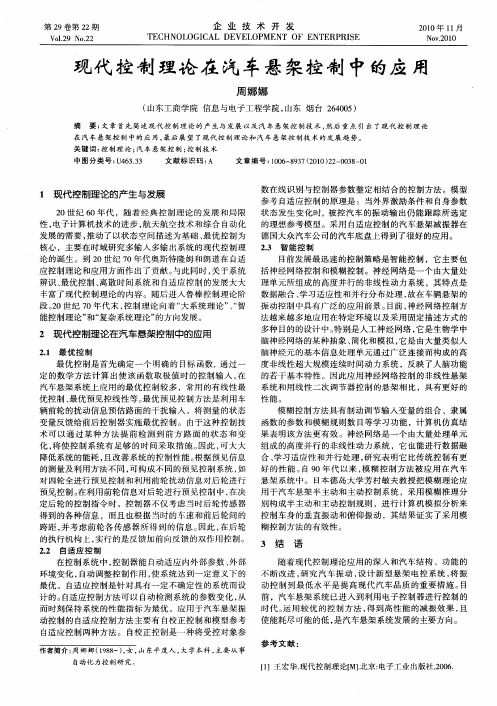
输出 悬挂质量
+
路面随机输入
自适应器 输出 非悬挂质量
阻力可调减振器
某半主动悬架阻尼自适应控制系统框图
23
3.6.4 汽车半主动悬架的共性问题
半主动悬架同时具有主动悬架、被动悬架的特征, 而且在更多方面保留有被动悬架的固有特征。概 括起来主要有以下几点: (1) 半主动悬架系统以闭环的方式控制阻尼力,包 括传感器、电子控制单元(ECU)以及调制阻尼力 的伺服阀,在这一方面类似主动悬架。 (2) 可以采用各种可能的控制策略,如天棚阻尼控 制、简单线性反馈控制、最优控制、相对控制, 也可以采用自适应控制,这也类似主动悬架。
7
3.2.1 汽车被动悬架系统模型
汽车悬架系统是一个多输入多输出系统,但为了研 究问题的方便,在研究悬架系统时,普遍采用单 轮模型,它是二自由度线性系统。 在建立汽车被动悬架系统模型时,作如下假设: (1) 取1/4汽车作为分析模型; (2) 只考虑垂直方向振动; (3) 不考虑非线性因素; (4) 认为轮胎不离开地面。
4
2.主动悬架 主动悬架与被动悬架相比,有以下特点: (1) 主动悬架能供给能量和调节能量,被动悬架只 能靠弹性元件变形储存和释放能量; (2) 主动悬架能产生许多变量函数的力,从而适应 外部环境广泛的干扰。
5
3.1.3 悬架的评价指标
根据汽车整车性能对悬架的要求,通常用以下三个 参数来评价悬架的优劣,即: (1) 车身垂直加速度(舒适性); (2) 车轮相对动载(安全性); (3) 悬架动挠度(防止悬架冲击缓冲块)。 在设计时,这三个参数应尽可能小,但在客观上存 在矛盾,特别是被动悬架。在悬架设计时,要综 合考虑这些参数的选取。
11
2.最优控制 最优控制是先要确定一个明确的目标函数,通过一 定的数学方法计算出使该函数取极值时的控制输 入。一般情况下,目标函数的确定要靠经验,最 优控制的解只有在极少数情况下才能得出解析解, 有的可以通过计算机得到数值解。在汽车悬架系 统上应用的最优控制较多,常用的有线性最优控 H 制、 最优控制和最优预见控制等。
半主动车辆座椅悬架系统的控制制与仿真

VhlEger 车辆工程 ei nien c e n i g
整 定方 法是 :初 定 比例 系数 之后 .加 入 积分 环
节 , 整 定 积 分 系 数 。 首 先 在 调 节 初 期 设 置 较 小 的
由 图 3 知 。正 弦 激 励 下 , 在 针 对 座 椅 加 速 度 可
11 P D控 制 原 理 . I
的参 数 ,实现 良好 的控制 效果 。而如何 进行 参数 的
整 定 是PD 制 策 略能 否 达 到预 定 要求 的关 键 。对 I控
在模 拟控 制 系统 中 ,PD控制 是 最 常 用 的控 制 I 方式闼 I 控 制系统 由PD 制器 和被 控对 象组成 , 。PD I控 其控 制 系统原 理如 图 1 示 。 所
于PD 制 器参 数 的调 节 ,可 以参 考 经验 公 式 以及 I控
不 同参 数下仿 真 结果 中最理 想结 果所 用 的参数 来选 定【 3 ] 。本 文 中 的控制 对 象是 模 拟 车辆 垂 直 方 向 的加
速 度 ,属 于 典 型 的偏 差 控 制 负 反 馈 结 构 , 可 以 采 用
1 P I控 制 策 略 分 析 I ) PD控 制 是 最 早 发 展 起 来 的 控 制 策 略 之 一 , 在 I
为座椅 加速 度 ,作 为信 号 ,定值设 置 为0 。 在 Mal /i uik 境 中 .建立 以座 椅 加 速 度 t bSm l a n
为 控 制对 象 的PD控 制 半 主 动 座 椅 系 统 仿 真 模 型 , I
车辆工程 Vh l ni e ei g er cE n目的是 在外 界路 面输 入 随 机改 变等 外扰作 用下 ,减 少振 动 ,保证 车辆 的乘 坐 舒适性 。基于磁 流 变半 主动座 椅悬 架 的减振 性能 不 仅 与磁流 变阻 尼器 自身 的设计 结构 、磁 流变 阻 尼 材 料性 能有 关 ,还与 半 主动悬 架 的控制 策略有 很 大 关 系 ,因此 ,选 取有 效 、便捷 的控 制方 式是 改善 座 椅 减振性 能 的重要 工作 。
现代控制理论在汽车悬架控制中的应用
模糊控制方法具有制 动调节输入变量的组合 、隶属 函数 的参数和模糊规则数 目等学习功能 ,计算机仿真结
术 可 以 通 过 某 种 方 法 提 前 检 测 到 前 方 路 面 的 状 态 和 变 果表 明该方法更有效 。神经网络是一个 由大量处理单元 化 , 使 控 制 系统 有 足够 的 时 间 采 取 措 施 。 将 因此 , 大 大 组 成 的高 度 并行 的非 线 性 动 力 系 统 ,它 也 能 进 行数 据 融 可 降低 系 统 的能 耗 , 改善 系统 的控 制 性 能 。 据 预 见 信 息 合 、 习 适应 性 和 并 行 处 理 , 究 表 明它 比传 统 控制 有 更 且 根 学 研 的测 量及 利 用 方 法 不 同 , 构 成 不 同的 预见 控 制 系 统 , 可 如 对 四轮 全进 行 预 见 控制 和利 用 前 轮 扰 动 信 息对 后 轮 进 行 预 见 控制 。 利 用 前 轮信 息 对 后 轮 进 行 预 见控 制 中 , 决 在 在 定 后 轮 的控 制 指 令 时 ,控制 器 不 仅 考 虑 当 时后 轮 传 感 器 好 的性 能 。 9 自 0年 代 以来 , 糊 控 制 方 法 被 应 用 在 汽 车 模 悬 架 系 统 中。 H本 德 岛大 学 芳村 敏夫 教 授 把 模糊 理 论 应 用 于 汽 车 悬 架 半 主 动 和主 动 控 制 系 统 ,采 用 模糊 推 理 分 别 构 成 半 主 动 和 主 动控 制 规 则 ,进 行 计 算 机 模 拟分 析 来
( 山东工商学 院 信息与电子工程学 院, 山东 烟台 2 40 ) 60 5
摘 要 : 章 首 先 简述 现 代 控 制 理 论 的 产 生 与 发 展 以及 汽 车 悬 架控 制 技 术 , 后 重 点 引 出 了现 代 控 制 理 论 文 然
半主动悬架与电动助力转向系统集成控制建模及性能仿真毕业设计(论文)

摘要 (3)Abstract (3)1 前言 (4)1.1 设计背景 (4)1.2 电动助力转向系统(EPS) (5)1.2.1 概述 (5)1.2.2EPS的国内外研究现状 (5)1.2.3 EPS的分类 (6)1.2.4 EPS的构成和工作原理 (7)1.3 汽车悬架系统 (8)1.3.1 悬架简介 (8)1.3.2 悬架的分类与工作原理 (8)1.3.3 半主动悬架的研究现状 (9)1.4 研究的目的与内容 (9)1.4.1 研究的目的 (9)1.4.2 研究内容 (9)2 控制理论 (11)2.1 模拟PID控制理论 (11)2.2 模糊控制理论 (11)2.2.1 模糊控制理论简介 (11)2.2.2 模糊控制的结构与控制规则 (12)3转向与悬架集成系统的建模 (14)3.1 转向工况下半主动悬架整车动力学模型 (14)3.2 转向模型 (14)3.3 半主动悬架模型 (15)3.4 EPS系统模型 (16)3.4.1 EPS结构模型 (16)3.4.2 助力电动机模型 (17)3.5 轮胎模型 (17)3.6 道路模型 (18)4 EPS建模仿真及PID控制 (21)4.1 EPS助力特性 (21)4.2 EPS控制策略 (23)4.2.1 控制策略的确定 (24)4.3 EPS建模及仿真结果 (25)4.3.1 EPS仿真参数的确定 (25)4.3.2 EPS仿真模块 (26)4.3.3 转向模型 (28)4.3.4 仿真结果 (28)5 30 5.1 半主动悬架的控制 (30)5.2 半主动悬架建模及仿真结果 (30)5.2.1 仿真参数 (30)5.2.2 半主动悬架的仿真模块 (31)5.2.3 仿真结果及分析 (32)5.3 EPS中的PID对半主动悬架的影响 (34)5.4 考虑俯仰的4自由度半主动悬架仿真及分析 (35)5.4.1 模型的建立 (35)5.4.2 仿真参数 (36)5.4.3 模糊控制的半主动悬架模型 (37)5.4.4 仿真结果及分析 (38)6 结论 (40)谢辞 (42)【参考文献】 (43)半主动悬架与电动助力转向系统集成控制建模及性能仿真转向系统与悬架是汽车底盘两大关键的子系统。
车辆半主动悬挂模型跟踪滑模控制系统仿真

车辆半主动悬挂模型跟踪滑模控制系统仿真车辆悬挂系统的控制是车辆行驶中非常重要的一部分,通过控制车辆悬挂系统,可以保证车辆的安全性和稳定性。
本文将介绍一种车辆半主动悬挂模型跟踪滑模控制系统的仿真。
车辆悬挂系统可以分为主动和半主动两种类型,其中半主动可以通过改变阻尼和弹簧硬度的方式控制悬挂系统。
半主动悬挂系统通常包括感应器、控制器和执行器三部分,感应器用于获取车辆状态信息,控制器根据状态信息计算控制信号,执行器通过控制信号控制悬挂系统的阻尼和弹簧硬度。
控制器的设计中,本文采用了滑模控制方法,该方法可以有效地抵抗扰动和模型参数不确定性的影响。
具体而言,本文将车辆悬挂系统建模为二阶系统,然后将控制器设计为一个二阶滑模控制器。
该控制器具有快速响应和鲁棒性等优点,能够保证车辆在不同路面和行驶条件下的稳定性和安全性。
为了验证该控制器的效果,本文进行了仿真实验。
在实验中,我们设定了不同的路面和车速参数,然后通过仿真计算得出车辆悬挂系统的状态信息,并将其输入到滑模控制器中。
在控制器的作用下,车辆在不同路面和行驶条件下都能够保持稳定,且响应速度很快,控制效果显著。
与传统控制方法相比,该方法可以更好地适应不同的行驶环境,提高车辆的安全性和行驶舒适性。
综上所述,本文提出了一种车辆半主动悬挂模型跟踪滑模控制系统,可以有效地提高车辆的安全性和行驶稳定性。
该方法具有很高的适应性和鲁棒性,可以适应不同路面和行驶条件下的车辆控制需要。
在未来的应用中,这种方法有望成为车辆悬挂系统控制的一种重要手段。
在现代社会,收集、分析和利用数据已经成为了各种企业和组织的重要策略。
以下是关于某个公司收集到的一些数据的分析。
1. 用户数量变化:该公司自成立以来,用户数量一直在不断地增长。
今年第一季度,公司的用户数量达到了 800 万,较去年同期增长了20%。
该数据表明公司的业务和市场需求在增长,是一个十分正面的指标。
2. 用户满意度调查:最近一次的调查显示,用户综合满意度得分为 8.5 分(最高分为10分),较去年同期的得分(8.0分)有所提升。
汽车悬架系统设计毕业设计和分析
轿车动力总成悬置系统优化设计研究摘要随着社会的日益进步和科学技术的不断发展,人们对汽车舒适性的要求也越来越高,良好的平顺性和低噪声是现代汽车的一个重要标志。
NVH已经成为衡量汽车质量水平的重要指标之一。
而动力总成是汽车最重要的振源之一。
如何合理设计动力总成悬置系统能明显降低汽车动力总成和车体的振动已经成为一个重要的课题。
本课题研究的目的是在现有动力总成悬置系统的基础上,优化动力总成悬置系统参数,达到提高整车平顺性和降低噪声的目的。
对动力总成悬置系统进行优化仿真,通过比较优化前的性能可知,优化后悬置系统隔振性能明显改善。
关键词:动力总成;悬置系统;优化Investigation on Optimization Design of Plant MountingSystem of a Passenger CarAbstractWith the increasing social progress and the continuous development of science and technology, people on the requirements of automotive comfort become more sophisticated and good ride comfort and low noise is an important sign of the modern automobile. NVH levels have become an important measure of vehicle quality indicator. The vehicle powertrain is one of the most important vibration source. How to design mounting system can significantly reduce the vehicle powertrain and body vibration has become an important issue.This study is aimed at existing powertrain mounting system, based on parameters optimization of powertrain mounting system, to improve vehicle ride comfort and reduce noise.On the optimization of powertrain mounting system simulation, the performance by comparing the known before the optimization, the optimized mounting system significantly improved.Key words: Powertrain;Mounting system;Optimization1绪论1.1选题依据汽车是日常生活中被广泛应用的交通工具,其本身可以被看作是一个具有质量、弹性和阻尼的振动系统。
车辆半主动悬架最优控制方法研究
车辆半主动悬架最优控制方法研究一、引言车辆悬架系统对车辆行驶性能和乘坐舒适性有着重要影响,悬架系统的控制方法研究是提高车辆安全性能和行驶舒适性的关键之一。
车辆悬架系统的控制方式可分为主动、半主动和被动三种,其中半主动悬架系统因为具有较好的安全性能和经济性,近年来受到了研究者的广泛关注。
本文旨在研究车辆半主动悬架最优控制方法,提高车辆行驶性能和乘坐舒适性。
二、车辆半主动悬架系统车辆悬架系统主要由减震器、弹簧和悬架支撑等组成。
在半主动悬架系统中,增加了一些控制器和执行器,通过调整减震器和弹簧的刚度和阻尼来控制车辆悬架系统的状态。
半主动悬架系统根据控制方式可分为阻尼可调和弹簧可调两种。
阻尼可调悬架最早应用于赛车领域,通过控制阻尼来减小车身振动,提高行驶稳定性。
弹簧可调悬架则利用可变刚度弹簧来调整悬架系统阻尼和刚度,实现悬架系统的控制。
半主动悬架系统的控制方式有当前反馈、预测控制和模型参考控制等,其中预测控制是一种现在较为流行的控制方法。
三、车辆半主动悬架最优控制方法半主动悬架系统最优控制方法的目标是最大限度地提高车辆行驶性能和乘坐舒适性。
提高行驶性能需要控制车辆的悬架系统调整,提高车辆的悬架系统的阻尼和刚度,减小车身的姿态变化,提高悬架系统对路面的适应能力。
提高乘坐舒适性需要减小车辆悬架系统的振动,提高乘坐的平稳性和舒适性。
最优控制方法包括控制器设计和优化问题两个方面。
控制器的设计可以采用反馈线性二次型控制器,并采用Kalman滤波器估计状态变量。
为了确保悬架系统的最优性能,需要根据不同车辆和不同路面情况进行优化设计。
优化问题中,应该考虑到车辆行驶的安全性能和乘坐舒适性。
可以采用多目标优化方法,将行驶安全性能和乘坐舒适性综合考虑,在保证安全性能的前提下,最大程度地提高乘坐舒适性。
四、实验结果与分析将半主动悬架最优控制方法应用于某种车辆上,通过实验验证了该方法的有效性。
在不同路面条件下,实验结果表明,半主动悬架系统最优控制方法能够显著提高车辆行驶性能和乘坐舒适性。
基于车辆模型的悬挂系统设计与优化

基于车辆模型的悬挂系统设计与优化车辆悬挂系统是汽车的重要组成部分,其设计和优化对于车辆的行驶性能、操控性和舒适性具有重要影响。
基于车辆模型的悬挂系统设计与优化是通过数学建模和仿真分析来确定最佳的悬挂系统参数,以提高车辆的悬挂性能。
本文将重点介绍基于车辆模型的悬挂系统设计和优化的方法和技术。
首先,基于车辆模型的悬挂系统设计需要建立一个准确的车辆动力学模型。
该模型包括车辆的质量、惯性、悬架刚度和阻尼等参数。
通过测量和实验,可以确定车辆的实际质量和重心高度等参数。
然后,可以使用数学模型来描述车辆的运动方程,包括悬挂系统的力学方程和刚度-阻尼特性。
常用的数学模型包括横向和纵向的自由度模型、多体系统模型和有限元模型等。
其次,基于车辆模型的悬挂系统设计可以通过优化算法来确定最佳设计参数。
优化算法的目标是使得车辆在行驶过程中具有最佳的悬挂性能,如最佳的舒适性、最小的悬挂系统质量和最佳的操控性。
常用的优化算法包括遗传算法、粒子群算法和模拟退火算法等。
通过数值计算和仿真分析,可以确定最佳的悬挂系统参数,如悬挂刚度、阻尼系数和减振器特性等。
同时,还可以考虑其他因素,如悬挂系统的重量、材料的选择和制造成本等。
悬挂系统的设计和优化还需要考虑实际的工程应用。
根据车辆的用途和行驶条件,可以选择不同类型的悬挂系统,如独立悬挂系统、双叉臂悬挂系统和麦弗逊悬挂系统等。
不同类型的悬挂系统具有不同的结构、性能和应用范围。
在设计和优化过程中,还需要考虑车辆的重心高度、悬挂系统的刚度和阻尼等参数。
通过合理的设计和优化,可以提高车辆的行驶稳定性、操控性和舒适性。
最后,基于车辆模型的悬挂系统设计还需要进行实验验证和验证。
通过实验和测试可以验证数学模型的准确性和优化算法的有效性。
可以使用试验台架进行静态和动态试验,如悬挂系统的冲击试验、悬挂系统的加载试验和悬挂系统的行驶试验等。
通过实验数据的分析和比对,可以验证悬挂系统的设计和优化结果的准确性和有效性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
XX大学现代控制理论——汽车半主动悬架系统的建模与分析姓名:XXX学号:XXXX专业:XXXX一. 课题背景汽车的振动控制是汽车设计的一个重要研究内容,涉及到汽车的平顺性和操纵稳定性。
悬架系统是汽车振动系统的一个重要子系统,其振动传递特性对汽车性能有很大影响。
因此设计性能良好的悬架系统以减少路面激励的振动传递,从而提高汽车的平顺性和操纵稳定性是汽车振动控制研究的重要课题。
悬架系统是汽车车身与轮胎间的弹簧和避震器组成整个支撑系统,用于支撑车身,改善乘坐舒适度。
而半主动悬架是悬架弹性元件的刚度和减振器的阻尼系数之一可以根据需要进行调节控制的悬架。
目前,半主动悬架研究主要集中在调节减振器的阻尼系数方面,即将阻尼可调减振器作为执行机构,通过传感器检测到汽车行驶状况和道路条件的变化以及车身的加速度,由ECU 根据控制策略发出脉冲控制信号实现对减振器阻尼系数的有级可调和无级可调。
二. 系统建模与分析1.1 半主动悬架系统的力学模型以二自由度 1/4半主动悬架模型为例,并对系统作如下假设:(1) 悬挂质量与非悬挂质量均为刚体; (2) 悬架系统具有线性刚度和阻尼; (3) 悬架在工作过程中不与缓冲块碰撞;(4) 轮胎具有线性刚度,且在汽车行驶过程中始终与地面接触。
综上,我们将该系统等效为两个质量块M ,m ;两个弹簧系统Ks ,Kt ;一个可调阻尼器(包含一个常规阻尼器Cs 和一个变化阻尼力F ),如图1所示。
图1 系统力学模型1.2 半主动悬架系统的数学模型由减振器的简化模型得:N S =-+F C V F对m 进行分析:()211201122()t s s d z dz dz m K z z K z z C Fdt dt dt ⎛⎫=------ ⎪⎝⎭即:()()1011212()t s s mz K z z K z z C z z F=------对M 进行分析:2212122()s s d z dz dz M K z z C F dt dt dt ⎛⎫=-+-+ ⎪⎝⎭即:()()21212s s Mz K z z C z z F=-+-+选取状态变量:1102213142x z z x z z x z x z =-=-==,,,输入变量:u F = 输出变量:1122y x y x ==,综上可得,系统状态空间表达式为:11032214331234423411t s s s s s s x z z x x z z x x K K C C x x x x x Fm m m mmK C C x x x x FM M M M=-==-=-=-+-+-=-+-+整理得:0010000110110t s ss s s s K K C C m m m m m K C C M MMM ⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥=+---⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦⎣⎦x x u10000100⎡⎤=⎢⎥⎣⎦y x 三. 数值化分析选取系统参数为:M=391 kg ,m=50.7 kg ,Ks=60KN/m ,Kt=362 KN/m ,Cs 取1 KN·s/m 。
状态空间表达式变为:001000011071401183.4319.7219.72-0.020-153.45 2.56-2.560.0026⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥=+⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦⎣⎦x x u10000100⎡⎤=⎢⎥⎣⎦y x 四. 能控性与能观性分析00100001101000,,71401183.4319.7219.72-0.0201000-153.45 2.56-2.560.0026⎡⎤⎡⎤⎢⎥⎢⎥-⎡⎤⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥--⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦A b c4.1 能控性分析能控性矩阵:23(,,,)M b Ab A b A b =通过matlab 计算得:Rank(M)=4,满秩,故系统可控。
4.2 能观性分析能观性矩阵:()23,,,TN C CA CA CA=通过matlab 计算得:Rank(N)=4,满秩,故系统可观。
五. 稳定性分析存在唯一平衡点x=0,对矩阵A 进行特征值计算:通过MATLAB 计算,我们得到特征值为:-10.2018+90.5683i ,-10.2018-90.5683i ,-0.9382+11.4463i ,-0.9382-11.4463i 。
由于矩阵A 的特征值均有负实部,所以系统是大范围渐近稳定的。
六. 状态观测器设计因为系统完全能观,所以可以设计状态观测器。
6.1 全维观测器将系统极点配置为:-1,-2,-3,-4. MATLAB 程序:>>A=[0,0,1,0;0,0,-1,1;-7140,1183.43,-19.72,19.72;0,-153.45,2.56,-2.56]; b=[0;0;-0.02;0.0026]; c=[1,0,0,0;0,1,0,0]; opt=[-1,-2,-3,-4]; G=(place(A,c',opt))’;输出结果为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=7877.00131.08140.09822.03395.101621.13873.789405.1G 所以,全维观测器方程为:00100 1.940578.387300110 1.162110.3395ˆˆˆ()71401183.4319.7219.72-0.020.98220.81400-153.45 2.56-2.560.00260.01310.7877y y -⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥=+-⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦xx u +6.2 降维观测器由于rank (c )=2,n=4,所以将系统极点配置为-1,-2.构造变换阵作线性变换,设10100010********,1000100001000100T T -⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦。
则,119.719.771401183.42.6 2.60153.410001100A T AT ---⎡⎤⎢⎥--⎢⎥==⎢⎥⎢⎥-⎣⎦, 10.020.00260010,000010B T B C CT --⎡⎤⎢⎥⎡⎤⎢⎥====⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦。
MATLAB 程序:>>opt2=[-1,-2];T=[0,0,1,0;0,0,0,1;1,0,0,0;0,1,0,0; ]; Tni=inv(T); A_2=Tni*A*T; B_2=Tni*B; C_2=C*T;A_11=A_2(1:2,1:2); A_21=A_2(3:4,1:2);G2=(place(A_11',A_21',opt2))'; 输出结果为:⎥⎦⎤⎢⎣⎡-=56.0272.1912G 。
所以,降维观测器方程为:110.980.027*******.40.02ˆˆ0.042.040153.40.0026119.72ˆˆ20.56w x y u x w y ----⎡⎤⎡⎤⎡⎤=++⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎡⎤=+⎢⎥-⎣⎦七. 最优控制对于半主动悬架系统,最优控制器的设计目的就是寻找最优控制F ,使实现控制所需的能量为最小:()dt x x q xq J ⎰∞++=24222211 ρ,其中,1q ,2q 分别为轮胎动变形加权系数,悬架动挠度加权系数,ρ为车身加速度加权系数。
将目标性能泛函改写成二次型性能指标形式:dt Ru u Qx x J T T ⎰∞+=)(,这里,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=000000000000021q q Q ,为半正定常数矩阵;21M R =,为正定常数矩阵。
所以,最优控制存在,且唯一:)()(1t Px B R t u T-*-= 式中,P 为44⨯维正定常数矩阵,满足黎卡提矩阵代数方程:01=-+---Q P B PBR P A PA T T采用试探法取三组不同权系数1q 、2q ,运用MA TLAB 进行计算分析:(1)q1=3.35e5,q2=40.5e5;(2)q1=3.35e8,q2=40.5e8;(3)q1=3.35e9,q2=40.5e9; Matlab 程序:%最优控制 clc;clear; M=391;A=[0,0,1,0;0,0,-1,1;-7140,1183.43,-19.72,19.72;0,-153.45,2.56,-2.56]; B=[0;0;-0.02;0.0026]; C=[1,0,0,0;0,1,0,0]; D=0; R=1/M^2;%求不同Q 、R 下的状态反馈阵K Q1=3.35e5;Q2=40.5e5;Q=[Q1,0,0,0;0,Q2,0,0;0,0,0,0;0,0,0,0]; [K P e]=lqr(A,B,Q,R) Ac=(A-B*K);Bc=B; Cc=C;Dc=D; T=0:0.05:5;U=0.2*ones(size(T));[Y,X1]=lsim(Ac,Bc,Cc,Dc,U,T); Q1=3.35e8;Q2=40.5e8;Q=[Q1,0,0,0;0,Q2,0,0;0,0,0,0;0,0,0,0]; [K P e]=lqr(A,B,Q,R) Ac=(A-B*K);Bc=B; Cc=C;Dc=D; T=0:0.05:5;U=0.2*ones(size(T));[Y,X2]=lsim(Ac,Bc,Cc,Dc,U,T);Q1=3.35e9;Q2=40.5e9;Q=[Q1,0,0,0;0,Q2,0,0;0,0,0,0;0,0,0,0];[K P e]=lqr(A,B,Q,R)Ac=(A-B*K);Bc=B;Cc=C;Dc=D;T=0:0.05:5;U=0.2*ones(size(T));[Y,X3]=lsim(Ac,Bc,Cc,Dc,U,T);figure;hold on;plot(T,X1(:,1),'--','color','black');plot(T,X2(:,1),'-','color','green');plot(T,X3(:,1),'-.','color','red');xlabel('时间(s)');ylabel('轮胎动变形(m)');hold off;legend('q1=3.35e5,q2=40.5e5','q1=3.35e8,q2=40.5e8','q1=3.35e9,q2=40.5e9');figure;hold on;plot(T,X1(:,2),'--','color','black');plot(T,X2(:,2),'-','color','green');plot(T,X3(:,2),'-.','color','red');xlabel('时间(s)');ylabel('悬架动挠度(m)');hold off;legend('q1=3.35e5,q2=40.5e5','q1=3.35e8,q2=40.5e8','q1=3.35e9,q2=40.5e9');figure;hold on;plot(T,X1(:,3),'--','color','black');plot(T,X2(:,3),'-','color','green');plot(T,X3(:,3),'-.','color','red');xlabel('时间(s)');ylabel('悬架动载荷(N)');hold off;legend('q1=3.35e5,q2=40.5e5','q1=3.35e8,q2=40.5e8','q1=3.35e9,q2=40.5e9');figure;hold on;plot(T,X1(:,4),'--','color','black'); plot(T,X2(:,4),'-','color','green'); plot(T,X3(:,4),'-.','color','red'); xlabel('时间(s )'); ylabel('车身加速度(m/s2)'); hold off ;legend('q1=3.35e5,q2=40.5e5','q1=3.35e8,q2=40.5e8','q1=3.35e9,q2=40.5e9');matlab 仿真结果如下:-8时间(s )轮胎动变形(m )图2 轮胎动变形变化趋势-7时间(s )悬架动挠度(m )图3 悬架动挠度的变化趋势-6时间(s )悬架动载荷(N )图4 悬架动载荷的变化趋势-6时间(s )车身加速度(m /s 2)图5 车身加速度的变化趋势通过MA TLAB 仿真得到,加权系数对悬架性能有较大的影响,当1q 、2q 取得较大值时,车身加速度,悬架动挠度及轮胎动变形的波动很小。