VIRES-Virtual-Test-Drive——复杂交通场景仿真工具
Virtools虚拟现实技术在工业仿真中的应用
《 备 制 造技 术) 00年第 5期 装 21
图 3 机 程
5 结 束语 4 设 计 流 程
Vr os iol 软件只是众 多虚拟现实软件 中的一种 ,它只是一 t V r o 实 现工业仿 真 的步 骤 , 常有 4步 , 先利 用 3 iol t s 通 首 D 软件建模 , 导入 到 Vr o 环境 , iol t s 进行 相关 的编程 、 设计 , 建 创 好 的文件 , 就可 以通过 3 V AP A ER播放器 来体 验( 图 4 D I L Y 如
图 3所 示 ) 。
收稿 日期 :0 0 0 — 2 2 1- 2 1
作者筒 介: 朱智亮 (99 )男 。 17一 , 山西运城人 , 助教 ,主要研究 方向是控制理论 与控制工程; 学文 (95 )男 , , 詹 17一 , 宁夏 中卫人 , 讲师 , 电子 与通信
工程硕士学位 。 主要研究方 向是 3 — A - R技术 。 D C D- V
关 键 词 : 拟 现 实 ; io l;D fr 1工 业 仿 真 虚 V r os3 ; t o Al 中 围分 类号 : P 9 . T 3 19 文献标识码 : B 文 章 编 号 :6 2 5 5 2 1 0 — 8 — 2 1 7 — 4 X( 0 0)5 ∞ 2 O
虚 拟现 实( 简称 V 是 以沉 浸性 、 R) 交互性 和构 想性为基本
2 设 计检 查
在设计 的过程 中, 有时需要根据要求 , 进行实 时检查设计
特征的计算 机高级人机界面。 综合利 用了计算机 图形学 、 他 仿 真技术 、 多媒体技术 、 人工智能 技术 、 计算 机网络技 术 、 行处 并 理技术和多传 感器技术 , 拟人 的视 觉 、 模 听觉 、 触觉 等感觉 器
基于Virtools轨道客车虚拟现实系统的研究
基于Virtools轨道客车虚拟现实系统的研究作者:王丽丽李颖路志刚蒋大旺来源:《中国科技博览》2014年第20期[摘要]利用3ds Max软件建模,Virtools进行程序控制,开发了虚拟现实场景下高速动车组漫游交互系统。
该系统可以通过虚拟现实专用动作捕捉设备或键盘和鼠标进行交互操作,沉浸感较好,让人身临其境。
不仅缩短了列车的研发周期,提高了设计人员的产品研发能力,而且更好地在虚拟现实系统中展示和宣传了企业产品。
[关键词]Virtools;虚拟现实;3ds Max中图分类号:TP393 文献标识码:A 文章编号:1009-914X(2014)20-0298-01虚拟现实技术可以利用计算机生成一种三维虚拟模拟环境(如虚拟驾驶室、生产车间等),通过多种力反馈设备使用户“投入”其中并与虚拟场景进行自然交互。
近些年来,虚拟现实技术被广泛地应用在各个领域,如军事仿真、教育、医学、制造等等。
文章以法国达索公司开发的Virtools软件为基础,研究轨道客车漫游交互系统,以提高企业的研发设计能力,缩短开发周期,降低开发成本。
1 系统整体设计及实现流程建立该系统的主要目标有两个,一是在研发设计过程中通过三维虚拟现实系统对客车的内饰和外观进行评审,及时进行方案交流,对方案进行调整,缩短设计周期,降低开发成本。
二是产品漫游,即对已经设计完成的客车进行外观和内饰的浏览,在实体样车生产出来之前对客车有初步的印象。
根据需求,系统设计整体功能框图如图1所示。
虚拟现实产品设计流程一般分为四个大的步骤:美术建模;将模型导入虚拟现实制作软件Virtools中;在Virtools中进行交互动作及各种功能的设计和实现;生成可执行文件.exe文件或发布成可以在网页上浏览的格式。
根据需求,本系统通过上述几个步骤后,将最终实现在3通道投影上的立体显示。
2 系统模型建立及关键处理技术对系统中出现的场景通过3ds Max软件进行建模,由于工业设计的客车数据量较大,目前市面上硬件的发展及软件的处理能力有限,将所有的数据放入Virtools中会导致软件的崩溃,因此为了处理客车的海量数据将按照工业设计的数据和尺寸通过3ds Max对客车进行建模,这样不但可以减少数据量还可以使用3ds Max对模型进行渲染,还可以弥补工业模型在色彩渲染上的不足。
虚拟场景仿真的测试方案

虚拟场景仿真测试智能驾驶场景仿真软件难以实现复杂场景的ADAS测试?用场景仿真软件编写ADAS测试用例效率太低?不知如何将编写的ADAS测试用例链接到需求?借助TPT,结合市面上主流的场景仿真软件VTD、DYNA4、CarMaker和PreScan等,我们便可以快速构建复杂的测试场景,并实现从场景设计、三维重构、测试执行管理、结果评估、报告生成的自动化。
与TPT已有内嵌接口的场景仿真软件如果你使用VTD进行ADAS场景仿真,那么TPT已经内置了和VTD的接口,你可以直接在TPT中调用VTD的数据接口及控制接口,进行基于场景的测试用例编写,并最终联合VTD完成不同场景下的仿真测试。
效果如下:场景仿真软件支持FMU Export如果你的场景仿真软件支持FMU Export(如DYNA4 R5),由于TPT支持FMU Import,所以你可以很方便地实现其与TPT的数据交互,FMI与FUSION平台之间的通信原理如图所示:图1. FMI与FUSION平台之间的通信当你想在TPT中读写DYNA4的信号,你需要修改DYNA4的模型,定义整个模型的输入输出接口,生成并导入FMU文件到TPT,TPT就可以读取这些接口,基于这些信号接口进行测试用例的编写。
效果如下:场景仿真软件不支持FMU Export如果你用的场景仿真软件不支持FMU Export i(如CarMaker,PreScan),你同样可以使用TPT中Fusion平台的用户自定义节点(Custom Node),来构建与场景仿真软件的数据接口。
Custom Node中提供了更加开放的API接口,因此你可以完成更多定制化的场景测试功能。
CarMaker与TPT集成的效果如下:换句话说,无论你使用何种场景仿真软件,基于TPT提供的Fusion平台,你都可以实现对该场景仿真软件中搭建的场景进行测试。
下面我们就以CarMaker为例,介绍一下如何通过TPT提供的Fusion平台连接场景仿真软件,实现基于TPT的智能驾驶场景测试。
Python与自动驾驶仿真利用Python进行自动驾驶仿真和测试
Python与自动驾驶仿真利用Python进行自动驾驶仿真和测试自动驾驶技术是当今汽车科技领域的热门话题之一,Python作为一种强大的编程语言,正逐渐在自动驾驶仿真与测试方面发挥着重要作用。
本文将探讨Python在自动驾驶仿真和测试中的应用。
一、自动驾驶仿真简介自动驾驶仿真是指使用计算机模拟技术,通过构建虚拟环境来模拟真实的驾驶场景,从而对自动驾驶系统进行测试和验证。
自动驾驶仿真主要包括道路建模、车辆控制、感知算法等方面。
二、Python在自动驾驶仿真中的使用1. 道路场景建模在自动驾驶仿真中,Python可以用于构建道路场景模型。
通过使用Python的图形库(如Pygame、Pyglet等),我们可以创建出逼真的道路、车辆以及其他交通参与者的模型。
对于道路的几何形状、标志标线的绘制和实时变化等功能,Python都能够提供便捷的解决方案。
2. 车辆控制与运动模拟Python在自动驾驶仿真中能够实现车辆的控制算法和运动模拟。
通过使用Python编写控制算法,我们可以实现车辆的轨迹规划、路径跟踪等功能。
同时,Python的数值计算库(如NumPy、SciPy等)可以帮助我们进行车辆运动模拟和动力学仿真,从而更好地评估自动驾驶系统的性能。
3. 感知与决策算法自动驾驶仿真中的感知与决策算法是其中的关键环节。
Python作为一种灵活的编程语言,可以实现各种感知和决策算法,如目标检测、道路识别、车辆跟踪、行为规划等。
Python的机器学习库(如TensorFlow、PyTorch等)更是为算法的开发和优化提供了强大的支持。
三、Python在自动驾驶测试中的应用1. 单元测试Python的单元测试框架(如unittest)可以帮助开发者进行自动驾驶系统的单元测试。
通过编写测试用例并运行自动化测试,可以验证自动驾驶系统的各个组件是否符合预期的功能和性能要求。
2. 集成测试Python的集成测试工具(如Pytest)可以对整个自动驾驶系统进行集成测试。
9款虚拟现实物流仿真软件简介

9款虚拟现实物流仿真软件简介1、FlexsimFlexsim的前身是Taylor II,Flexsim应用深层开发对象,这些对象代表着一定的活动和排序过程。
要想利用模板里的某个对象,只需要用鼠标把该对象从库里拖出来放在模型视窗即可。
每一个对象都有一个坐标(x,y,z)、速度(x,y,z),旋转以及一个动态行为(时间)。
对象可以创建、删除,而且可以彼此嵌套移动,它们都有自己的功能或继承来自其他对象的功能。
这些对象的参数可以把任何制造业、物料处理和业务流程的快速、轻易、高效建模的主要特征描述出来。
不过其宣称的Flexsim内置了虚拟现实浏览窗口,可以让用户添加光源、雾以及虚拟现实立体技术,个人感觉仅是个噱头而已。
2、eM-PlanteM-Plant(原名SIMPLE++)系统规划分析模拟软件,在规划阶段可透过eM-Plant分析全厂之设施规划方案选择、设备投资评估、暂存区、生产线平衡、瓶颈分析、派工模拟及产能分析模拟及企业再造等模拟分析基本上与Witness和Factor/AIM一样,同样属于平面离散系统生产线仿真器。
齐备了周边的机器人仿真器群。
可以与CAD、C APE、ERP、DB等软件之间实时通信。
与周边的机器人仿真器群之间有强有力的关联,面向大型制造业领域的仿真群中,和Delmia公司实力相当。
其主要目的是整体系统的优化等,主要与周边系统联合起来灵活使用。
但是价格昂贵,从周边工具群的联合中脱离出来单独使用时,缺乏魅力。
3、WitnessWitness是英国Lanner Group的产品,是平面离散系统生产线仿真器,操作简单,在低配置计算机上也完全可以灵活使用,是生产线仿真器的老字号,其齐备的基本仿真功能和处理优势,一直是大家所公认的。
作为可选项,还具备了三维立体显示功能(VR),扩大了其适用范围,不过三维立体显示功能是后来添加的可选项,所以不适合模型从大致轮廓的概念设计开始依次建构下去的动态过程中使用。
Virtual Lab实现世界首列磁悬浮列车仿真
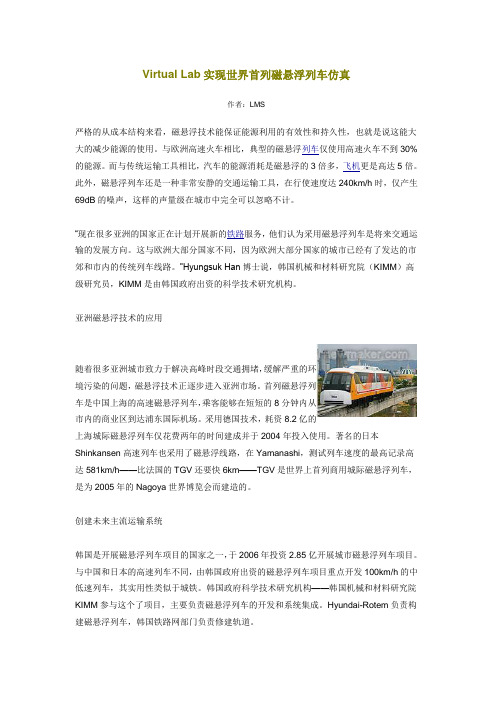
VirtualLab实现世界首列磁悬浮列车仿真作者:LMS严格的从成本结构来看,磁悬浮技术能保证能源利用的有效性和持久性,也就是说这能大大的减少能源的使用。
与欧洲高速火车相比,典型的磁悬浮列车仅使用高速火车不到30%的能源。
而与传统运输工具相比,汽车的能源消耗是磁悬浮的3倍多,飞机更是高达5倍。
此外,磁悬浮列车还是一种非常安静的交通运输工具,在行使速度达240km/h时,仅产生69dB的噪声,这样的声量级在城市中完全可以忽略不计。
“现在很多亚洲的国家正在计划开展新的铁路服务,他们认为采用磁悬浮列车是将来交通运输的发展方向。
这与欧洲大部分国家不同,因为欧洲大部分国家的城市已经有了发达的市郊和市内的传统列车线路。
”Hyungsuk Han博士说,韩国机械和材料研究院(KIMM)高级研究员,KIMM是由韩国政府出资的科学技术研究机构。
亚洲磁悬浮技术的应用随着很多亚洲城市致力于解决高峰时段交通拥堵,缓解严重的环境污染的问题,磁悬浮技术正逐步进入亚洲市场。
首列磁悬浮列车是中国上海的高速磁悬浮列车,乘客能够在短短的8分钟内从市内的商业区到达浦东国际机场。
采用德国技术,耗资8.2亿的上海城际磁悬浮列车仅花费两年的时间建成并于2004年投入使用。
著名的日本Shinkansen高速列车也采用了磁悬浮线路,在Yamanashi,测试列车速度的最高记录高达581km/h——比法国的TGV还要快6km——TGV是世界上首列商用城际磁悬浮列车,是为2005年的Nagoya世界博览会而建造的。
创建未来主流运输系统韩国是开展磁悬浮列车项目的国家之一,于2006年投资2.85亿开展城市磁悬浮列车项目。
与中国和日本的高速列车不同,由韩国政府出资的磁悬浮列车项目重点开发100km/h的中低速列车,其实用性类似于城铁。
韩国政府科学技术研究机构——韩国机械和材料研究院KIMM参与这个了项目,主要负责磁悬浮列车的开发和系统集成。
Hyundai-Rotem负责构建磁悬浮列车,韩国铁路网部门负责修建轨道。
VRED软件在轨道交通车辆渲染设计中的应用

VRED软件在轨道交通车辆渲染设计中的应用发布时间:2021-04-14T02:40:58.780Z 来源:《中国科技人才》2021年第6期作者:季曦冉[导读] VRED(Virtual Reality Editor),是一款面向专业用户的,高效率地用于制作高质量虚拟现实内容的三维软件,常用于汽车渲染设计行业,能够提供可视化的实时渲染效果。
中车唐山机车车辆有限公司摘要:针对渲染质量不高、使用软件复杂交叉且模型转换繁复等问题,本文以轨道交通车辆为例,介绍VRED软件在轨道交通车辆工业设计中的应用,展现VRED软件操作的便捷性和高效性,起到减少繁复设计工作、提高渲染质量、提升设计效率的作用。
关键词:VRED;轨道交通;工业设计;渲染1、Autodesk VRED软件概述VRED(Virtual Reality Editor),是一款面向专业用户的,高效率地用于制作高质量虚拟现实内容的三维软件,常用于汽车渲染设计行业,能够提供可视化的实时渲染效果。
该软件功能丰富,上手简单、能够与多个软件实现数据交换,使用起来方便快捷。
同样,在轨道交通领域,该软件也能起到很强的适配性,能够为轨道交通车辆提供实时的、更加真实的渲染效果展示,减少设计中因数据交换发生的错误,提升设计效率。
2、Autodesk VRED软件优势在轨道交通车辆设计中,车辆渲染是基于已完成的三维模型进行,将三维模型导入到渲染器中,完成效果渲染。
车辆建模常见有多边形网格建模和曲线建模两种方式,其中3d Max、Maya软件为多边形建模,曲面渲染质量不高,容易出现折角;而Alias、Rhino软件为曲线建模,渲染质量好,曲面效果真实。
为了最大化地表现模型的渲染效果,需要一款稳定且支持多种模型格式的渲染器。
VRED作为一款专业的渲染软件,支持多格式的模型导入,能够解决繁复的模型导入导出环节,一次性导入模型后进行轻量化,开始后续工作。
其次,该软件拥有真实的HDR场景库和材质库,能够还原真实的车漆效果和光照效果,使整个车辆渲染效果更加真实。
V2X-HIL测试方案
V2X-HIL测试方案目录1.系统架构 (3)1.1.系统架构 (3)1.2.功能架构 (3)2.子系统设计与说明 (4)2.1.C-V2X 仿真测试软件 (4)2.2.C-V2X 自动化测试管理系统 (12)2.3.C-V2X 应用场景测试过程演示系统 (23)2.4.C-V2X 场景基础库 (25)2.5.C-V2X 测试辅测机及测试软件 (33)2.6.GNSS模拟器 (35)2.7.HIL机柜及交换机 (38)1.系统架构1.1.系统架构整个系统测试由2大块组成,测试系统以及外围设备。
系统架构图如下图所示:V2X 综合测试仪:主要包括HIL场景测试系统以及协议一致性测试系统。
其中HIL场景测试系统可生成3D仿真场景,支持生成车辆模型、道路模型、导入路网等功能;自动化测试工具支持场景的管理的创建、测试用例的管理、测试用例执行和测试报告的生成等功能;协议一致性测试系统可对被测件执行网络层、消息层、安全层的协议一致性测试系统;外围设备管理,可管理机柜、C-V2X测试辅测机、GNSS 信号源等外围设备。
1.2.功能架构系统功能架构,如下图所示:2.子系统设计与说明2.1.C-V2X 仿真测试软件本项目采用VTD构建C-V2X仿真测试软件。
Virtual Test Drive (VTD)复杂交通环境视景建模、仿真软件由德国的 VIRES 公司开发,该公司成立于 1996 年,VIRES 的产品主要是针对交通领域实时视景系统的应用而开发,包括汽车、轨道交通及航空领域,其中汽车主动安全的复杂交通视景系统开发是 VIRES VTD 最重要的应用方向,并已在奥迪、宝马及奔驰应用在各自的驾驶模拟器的交通场景开发中。
VTD 提供了一套从道路设计到仿真框架的完整工具链,支持标准设计,使用开放标准(OpenDRIVE,OpenCRG etc.),支持实时仿真,如在 SIL/DIL/VIL/HIL 环境下评估高级驾驶员辅助系统(ADAS)、主动安全系统(active safety systems),内置多种传感器模型,能够为智能驾驶提供逼真的场景和传感器,主要针对复杂的实时交通环境实现视景仿真应用,在 Linux 系统中运行,高度模块化,是一款非常灵活的软件,支持视景实时渲染能力强,渲染稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
VIRES-Virtual-Test-Drive——复杂交通场景仿真工具
VIRES Virtual Test Drive——复杂交通场
景仿真工具
VIRES Virtual Test Drive (VTD®)为驾驶模拟应用提供了一整套工具链,包括:
•VTD可提供工具实现复杂道路建模、场景编辑、交通流仿真、声音模拟、仿真控制和图像生成等功能,且生成的文件格式符合相应的标准。
•VTD为第三方组件提供了开放性接口,同时支持API将第三方模块作为VTD 的插件。
•VTD应用于汽车、轨道交通、航空等多领域,其中汽车领域的客户有Audi,BMW等多家厂商
主要特征
•从道路设计到仿真框架的完整工具链
•模块化设计
•开放性接口
•使用开放的标准(OpenDRIVE,OpenCRG等)
•实时性
•可拓展性
主要应用
•高级驾驶员辅助系统(ADAS)评估
•主动安全系统的软件在环(SIL)、驾驶员在环(DIL)、车辆在环(VIL)、硬件在环(HIL)等交通场景模拟
•传感器模拟(雷达、红外、影像系统等)
•驾驶员(汽车、轨道交通等)训练模拟器
•车辆新技术新功能展示体验
汽车领域主要客户群
•OEMs
•零部件供应商
•相关研究机构及高校
Road Designer ROD®
•交互式道路网络编辑
•符合道路建设规则
•可拓展的3D模型及纹理库•可创建道路“样板”数据库
v-TRAFFIC/v-SCENARIO
•交通/场景编辑、监控和仿真模块•按交通规则随机运行的交通状况•指定车辆运行状况
•车辆行为用户触发/控制策略触发•行人干扰仿真模拟
v-IG
•高端实时视景生成器
•实时影子、眩光
•路面积水反光效果
•高质量车身渲染
•雨/雪/雾等天气渲染
•红外模块
•高质量大灯渲染及随动效果模拟•实时图像生成
v-TaskControl
•核心模块
•仿真任务及数据管理
•仿真控制
•记录/回放功能
•第三方软件接口
v-IOS
•仿真配置及操作图形用户界面
SOUND
•3d音效模块
配置要求
•标准PC硬件
•Linux 操作系统(32bit或64bit,openSUSE)•nVIDIA® 显卡和驱动。