道路交通仿真模型与方法_图文
建模与仿真(MAS部分)_图文_图文
预动性(pro-activeness):
主体不是简单的对环境被动反应,而是能采取主动,表现出目标 导向(goal-directed)的行为。
(4)主体的强概念
建模与仿真(MAS部分)_图文_图文.ppt
主讲内容
主体与多主体系统 多主体建模与仿真 多主体模型的实现 多主体仿真在社会科学中的应用 Aspen多主体经济模型
一、 主体与多主体系统
(一) 主体概念 (1)主体的来源
Agent :主体,智能体,代理 来源于分布式人工智能领域 Minsky,1986《The Society of Mind》 1990s在人工智能领域得到重视 1990s~ 在其他领域广泛应用
控制器根据主体的性质选择控制策略,将规则与事实进行 匹配,消解冲突,进行推理,实现主体决策,产生行动。
(2)面向对象技术
为每类主体设计相应的类,用属性表达主体
的内部状态,用方法表示主体的行为。
多主体系统中的主体本质上是并发的。主体
的主动性和并发性需要在面向对象框架中采 用一定的技术手段进行模拟。
ACL 消息结构
一个ACL消息是由通信行为、通信内容以及
一组消息参数等几部分组成
(2)通信方式
主体之间常用的通信机制有三种:
黑板机制 邮箱机制 消息传递机制
(3)交互协议
交互协议定义了主体之间为了进行协作,实
现某个特定目标而进行交互的结构化消息。
FIPA对一些典型的对话定义了交互协议,
界,
设定初始条件(如结构条件、制度安排、主
道路交通仿真模型和方法101页PPT
1
0
、
倚
南
窗
以
寄
傲
,
审
容
膝
之
易
安
。
谢谢
11、越是没有本领的就越加自命不凡。——邓拓 12、越是无能的人,越喜欢挑剔别人的错儿。——爱尔兰 13、知人者智,自知者明。胜人者有力,自胜者强。——老子 14、意志坚强的人能把世界放在手中像泥块一样任意揉捏。——歌德 15、最具挑战性的挑战莫过于提升自我。——迈克尔·F·斯特利
道路交通仿真模型和方法
6
、
露
凝
无
游
氛
,
天
高
风
景
澈
。
7、翩翩新 来燕,双双入我庐 ,先巢故尚在,相 将还旧居。
8
、
吁
嗟
身
后
名
,
于
我
若
浮
烟
。
9、 陶渊 明( 约 365年 —427年 ),字 元亮, (又 一说名 潜,字 渊明 )号五 柳先生 ,私 谥“靖 节”, 东晋 末期南 朝宋初 期诗 人、文 学家、 辞赋 家、散
如何进行交通仿真和交通规划
如何进行交通仿真和交通规划交通仿真与交通规划的重要性交通是现代社会中不可或缺的重要组成部分。
随着城市化进程的加快与人口的不断增长,城市交通拥堵日益严重,交通规划成为解决交通问题的重要手段之一。
而在交通规划的过程中,交通仿真作为一种有效的工具,对于评估交通状况、模拟交通流动以及预测未来交通发展趋势起着至关重要的作用。
一、交通仿真技术简介交通仿真是通过模拟各种交通要素之间的相互作用,从而对交通现象进行模拟和预测的过程。
交通仿真技术主要包括交通流仿真、交通行为仿真和交通运营仿真。
交通流仿真主要模拟车辆在路网上的行驶情况,包括车辆的速度、密度、流量等指标,以及交通信号的控制情况。
通过对交通流的仿真,可以评估道路网络的通行效率和容量,并为交通规划提供数据支持。
交通行为仿真则是研究驾驶员的行为和决策,并模拟他们在特定交通环境中的行为模式。
交通行为仿真可用于评估不同交通政策对驾驶员行为的影响,为规划者提供决策支持。
交通运营仿真则模拟交通系统的运行情况,包括车辆的调度、站点的管理等方面。
通过交通运营仿真,可以全面了解交通系统的运营模式,为交通规划者提供优化建议。
二、交通仿真与交通规划的关系交通仿真技术与交通规划密不可分。
首先,交通仿真可以提供大量的数据支持,为交通规划提供客观、准确的交通状况评估。
通过仿真,交通规划者可以预测未来的交通需求、路网容量以及交通流动状况,从而更好地制定交通规划方案。
其次,交通仿真可以测试不同的交通方案,并评估其效果。
例如,在交通规划中,可能会涉及到道路扩容、信号优化、公共交通发展等多个方面的改进。
通过仿真技术,可以模拟不同的方案,评估其对交通系统的影响,并选择最佳方案。
最后,交通仿真还可以用于交通规划的决策支持。
通过分析仿真结果,规划者可以更好地理解交通问题的本质,并在制定规划方案时做出更加明智的决策。
三、交通仿真与交通规划的挑战与展望尽管交通仿真在交通规划中有着广泛的应用,但仍然存在一些挑战。
(整理)交通建模仿真.
1. VISSIM介绍VISSIM为德国PTV公司开发的微观交通流仿真软件系统,用于交通系统的各种运行分析。
该软件系统能分析在车道类型、交通组成、交通信号控制、停让控制等众多条件下的交通运行情况,具有分析、评价、优化交通网络、设计方案比较等功能,是分析许多交通问题的有效工具。
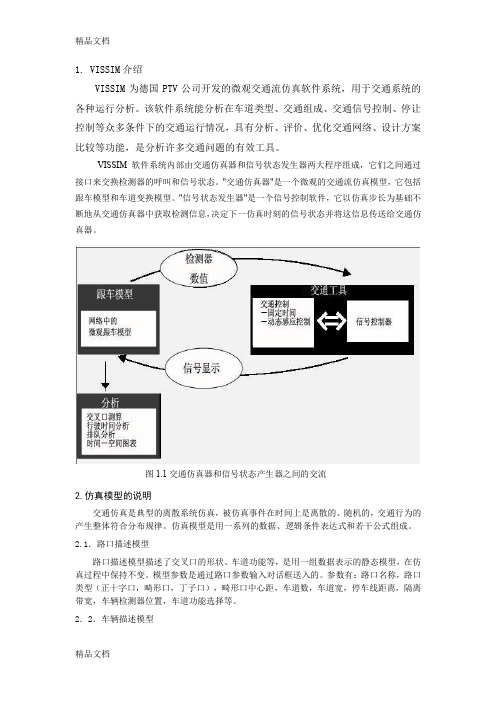
VISSIM软件系统内部由交通仿真器和信号状态发生器两大程序组成,它们之间通过接口来交换检测器的呼叫和信号状态。
"交通仿真器"是一个微观的交通流仿真模型,它包括跟车模型和车道变换模型。
"信号状态发生器"是一个信号控制软件,它以仿真步长为基础不断地从交通仿真器中获取检测信息,决定下一仿真时刻的信号状态并将这信息传送给交通仿真器。
图1.1交通仿真器和信号状态产生器之间的交流2.仿真模型的说明交通仿真是典型的离散系统仿真,被仿真事件在时间上是离散的、随机的,交通行为的产生整体符合分布规律。
仿真模型是用一系列的数据、逻辑条件表达式和若干公式组成。
2.1.路口描述模型路口描述模型描述了交叉口的形状、车道功能等,是用一组数据表示的静态模型,在仿真过程中保持不变。
模型参数是通过路口参数输入对话框送入的。
参数有:路口名称,路口类型(正十字口,畸形口,丁子口),畸形口中心距,车道数,车道宽,停车线距离,隔离带宽,车辆检测器位置,车道功能选择等。
2.2.车辆描述模型车辆描述模型描述了车辆的形状、位置、颜色、速度、来向、去向、期望速度、车辆反应时间等。
模型参数随着车辆的随机生成而产生,某些参数随着车辆的运行而改变。
车辆描述模型与车辆生成模型、车辆运行模型有着密切的关系,是它们模型算法执行结果的直接反映。
2.3.车辆生成模型车辆生成模型描述了车辆的随机到达数分布,到达车辆的车型分布,到达车辆的流向分布,到达车辆车道选择方法,到达车辆车色分布。
车辆生成模型是交叉口车辆运行模型的基础。
(1)车辆到达数分布模型车辆到达数的分布是离散型的随机分布,又称之计数分布,反映了在某一固定时段内到达给定地点车辆的随机数。
微观交通仿真理论与实训 PPT课件(理论篇)第五章 微观仿真模型检验与标定

1.确定设施通行能力测算方法 2.获取模拟设施通行能力
3.选择通行能力影响参数
4.建立标定目标函数
5.寻找最优参数组合
6.参数微调
2
路径选择影响参数标定
全局参数标定和参数微调
3 系统特性标定
用以确定以上标定工作的综合效应
1.确定设施通行 能力测算方法
2.获取模拟设施 通行能力
3.选择通行能力 影响参数
1.确定设施通行 能力测算方法
2.获取模拟设施 通行能力
3.选择通行能力 影响参数
4.建立标定目标 函数
5.寻找最优参数 组合
6.参数微调
1 设施通行能力影响参数标定
微观仿真软件并不能直接输出设施通行能力值,需要仿真研究人员人为设置获取设施 通行能力的方法,然后统计最大小时流率。
例如:可以利用信号灯控制手段使车流排队,以获取饱和车流。 一般来说,仿真模型出现拥堵的地点应该与真实场景相同。 调试方法: ①如果没有产生真实场景中的交通瓶颈点,可以增加交通需求创建与真实场景相同的模拟 条件,标定通行能力影响参数; ②出现瓶颈点与现实场景不同,那么需要调整仿真模型中瓶颈点的通行能力。 设施通行能力的获取方法与第1步相同。
4
步骤四:仿真待标定参数评价
➢ 仿真系统涉及很多可控参数,且每一个参数都有 不同的取值范围,对每一种可能的情况都做相应 的排列组合,显然是很难应用于实际操作的。例 如,如果仿真系统有8个可控参数,每个参数取 值分为5个级别,则需要做的仿真试验有58 (390625)次。
➢ 运用优化算法实现参数的自动标定意义重大。
3
掌握微观仿真软件交通仿真机理
2 检验交通基础数据
观察仿真生成动画场景
5.1 仿真模型的检验
第一讲-交通仿真技术

Gipps, P G., A model for the structure of lane changing decision, Transportation Research B, 20(5), 403-414, 1986.
Lind, G et al, Best Practice Manual, /smartest, 1999. Algers, S et al, Review of Micro-Simulation Models, /smartest, 1997.
仿真技术发展历史
20世纪初仿真技术得到应用。例如在实验室中建立水利模 型,进行水利学方面的研究。40~50年代航空、航天和 原子能技术的发展推动了仿真技术的进步。
50 年代初,连续系统的仿真研究绝大多数是在模拟计算机 上进行的。
50年代中,人们开始利用数字计算机实现数字仿真。计算 机仿真技术向模拟计算机仿真和数字计算机仿真两个方 向发展。在模拟计算机仿真中增加逻辑控制和模拟存储 功能后,出现了混合模拟计算机仿真,以及将混合模拟 和数字计算机联合在一起的混合计算机仿真。在仿真技 术发展过程中研制出大量仿真程序包和仿真语言。
14
60年代计算机技术的突飞猛进,为仿真技术提供 了先进的工具,加速了仿真技术的发展。 70年代 后,研制成功了专用的全数字并行仿真计算机。 美国是仿真技术及系统发展最快、应用最广泛的 国家。1967年,美国成立了计算机仿真学会 (Society for Computer Simulation),推动了仿真 技术在美国的发展和应用。
系统模型
模型是系统的一种描述,是为了研究目的 而开发的对真实系统进行模拟的一种形式。 能更真实、深刻反映系统的主要特征和运 动规律。 物理模型,实体模型 数学模型,实际系统的一种数学描述,用 数学符号和数学方程式来表示系统的模型 或者用文字、框图、流程和资料等形式对 真实系统的描述。
【交通运输】第八讲 道路交通系统仿真模型与方法

用于研究基础设施的新建、扩建及宏观管理措施等。如大 规模的路网范围内进行交通宏观仿真。
中观交通仿真
在宏观交通网络的基础上,将个体车辆放入宏观交通流中 进行分析,根据模拟的需要,对特定车辆的速度、位置及 其它属性进行标识,或对个体车辆分组,再对每组车辆的 速度、位置及其它属性进行标识。
能够产生进入路网的不同种类的车辆以及车长、初速 度等,获得交通流的各种统计数据;
能够处理车辆在路网上的运行情况,准确地反映出车辆 间的相互作用,如跟驰、车道变换时的相互作用,以及 驾驶员的行为;
能够处理网络内部对车流产生影响的发生点和吸纳点 能够跟踪路网内行驶的任何一辆车,真实地模拟交通控
微观交通仿真
微观交通仿真把每辆车作为一个研究对象,对所有个体车 辆都进行标识和定位。在每一扫描时段,车辆的速度、加 速度及其它车辆特性被更新。
微观交通仿真能模拟出短时段内交通流的波动情况。跟驰 模型、超车模型及变换车道模型是微观仿真的基本模型。
对交通流的描述是以单个车辆为基本单元的,进入路网的 时间、车种、车速的设定及路口的转向都是随机确定的。 微观仿真模型的重要参数是每辆车的速度和位置。
P(h>t)=exp[-λ (t -τ)] t≥τ
随机产生车辆与司机:爱尔朗分布
p(h≥t)
k
1
(
kt
)i
ekt / T
i0 T
i!
当阶数k=1时,爱尔朗分布便化为指数分布,可看成 是完全随机的;当k增大时,爱尔朗分布的图形逐渐变 成对称的;当k≥30时,爱尔朗分布近似于正态分布;
【交通运输】第八讲 道路交通系统仿真模型与方法
强制性车道变换
其临界距离可用下述模型表示:
Di Di0 i
式中,Di为第i种需要变换车道情形相应的临界距离; Di0为第i种需要变换车道情形相应的一常数值;i为一 正态分布随机变量。
基本模型 ❖ 停车排队模型 ❖ 冲突分析模型 ❖ 排队消散模型 参阅:邹智军. 信号灯交叉口微观交通仿真模型研究.
中国公路学报(增刊),2000. 13:93-96
四、中观交通仿真模型
中观交通仿真是在宏观交通网络的基础上,将个体车 辆纳入宏观交通流中进行模拟分析,它不必象微观交 通仿真模型那样,分析个体车辆之间的相互作用与影 响。这一仿真系统可以用来拟定、评价在较大范围进 行交通控制和干预的措施和方法,并最终对交通流进 行最优控制。
1 交通流微观仿真系统的功能要求
能够模拟先进的交通管理策略,如路径重定向、速度控 制和车道控制等;
能够提供与外部应用程序交互的接口; 能够模拟动态车辆诱导,再现被诱导车辆和交通中心
的信息交换; 能够应用于一般的路网,包括城市道路和城市间的高
速公路; 能够仿真路网交通流的状况,如交通需求的变化等; 能够模拟公共交通; 提供结果分析的工具和图形化的交互界面。
中观交通仿真模型对交通系统的要素及行为的细节描述程 度较高。其对交通流的描述往往以若干辆车构成的队列为 单元,能够描述队列在路段和节点的流入流出行为,对车辆 的车道变换之类的行为也可用简单的方式近似描述。
这一仿真系统可以用来拟定、评价在较大范围内进行交通 控制和干预的措施和方法,从而对交通流进行最优控制。 根据目前计算机硬件的发展水平,可以在较大规模的路网 范围内进行交通中观仿真,如ITS中面向诱导的交通仿真。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
16
微观仿真软件能够描述的交通现象
交通现象 排队 路傍停车 交织运行 行人约束 突发事件 天气条件 车辆类别 发动机模型 环岛 停车场搜索 公共交通 自行车/摩托车 交通镇静措施
描述方法 通过可利用空间约束、跟车及换道刻画; 通过特定节点、路段上车辆的状态来刻画;
五是交通出行的技术性能指标,如费用与燃料 消耗。
21
仿真评价指标
目标
效率
安全
指标
速度 出行时间 拥挤 出行时间变化率 排队长度 公交管制 方式选择 车头时距 超车 事故数量 事故/速度严重性 离碰撞时的时间间隔 行人作用
提供率
87% 87% 71% 68% 65% 26% 16% 42% 26% 16% 16% 16% 16%
基本的仿真技术
几乎所有的仿真软件均采用面向对象的编程技术 .绝大部分采用了时间扫描的描述方式.且多为 微观仿真。
24
4交通仿真系统的结构
以微观交通仿真系统为例,其结构一般包
括3个主要模块:
一是道路网络描述模块,包括交叉口,路
段,小区等;
二是车路间的信息通信模块,涉及交通流
诱导等问题;
三是车辆动态运行模块。
(3)车辆特性差异大 我国道路上行驶车辆种类繁多,性
能差异很大。性能较差的车辆增加了道路突发事件概率 。
28
要解决的技术关键
(1)建立非机动车与机动车之间的影响模型,包括 在交叉口、有隔离路段及无隔离路段的相互作 用模型;
(2)研究我国国情下道路交通管理计划的计算机描 述模型,重点是城市道路交叉口信号配时对机 动车与非机动车行驶的描述;
通过强制换道、特定换道模型、决策规则、换道逻辑等刻画;
主要通过冲突区及其相互作用来判断; 通过对道路上非期望事件出现的判断来描述 通过车辆速度-加速度行为刻画; 通过车辆尺寸、重量、优先级等刻画; 通过机械方法或加速率的改变来刻画; 通过车道分段、让行、交织区等刻画。 通过固定地点/区域停车场状态扫描来刻画; 通过固定某类车辆行驶线路来刻画; 通过自行车及其对机动车的影响来评价;
25
26
仿真系统的输出指标
网络上车辆行驶的信息
如总旅行时间,旅行距离,平均速度;
经过的交通检测设备
如记数器,速度,车道占有情况,点到点时间 ,车辆类型,突发事件信息等;
路段交通数据 包括路段交通密度,路段平均
速度,旅行时间等;
仿真运行中的警告及错误信息; 环境排放与燃料消耗数据; 车辆运行与路段交通数据的图形显示。
道路交通仿真模型与方法_图文.ppt
引言
交通仿真是研究运用现代计算机技术再现实际交通系
统的特性、分析交通系统在各种设定条件下的可能行 为以寻求现实交通问题最优解的一种手段,也是评价 运输设施各类运用设计方案效果的有效方法。
美国是仿真技术及系统发展最快、应用最广泛的国家
。1967年,美国成立了计算机仿真学会(Society for Computer Simulation),推动了仿真技术在美国的发 展和应用。
控制策略。
19
微观交通仿真系统的功能要求(2)
模拟先进的交通管理策略; 提供与 外部应用程序交互的接口; 模拟动态车辆诱导,再现被诱导车辆和交通中
心的信息交换;
应用与一般的路网,包括城市道路和城市间的
高速公路;
仿真路网交通流的状况; 模拟公共交通; 提供结果分析的工具和图形化的交互界面。
模型参数问题,多数国外模型中的参数不太适
合有大量非机动车存在时的我国交通环境;
国外产品没有汉化,外文界面及技术手册使得
它们难以在工程技术界得到推广;
软件的价格问题,国内交通企业对软件的认识
还没有达到发达国家的水平,真正的软件市场 尚未形成。
33
仿真模型
仿真模型开发的要点是了解有哪些方法/
技术可以用于建模。
(6)信息技术
已有的仿真软件与模型都是局限于交通环境自 身而言的,没有真正与GPS和GIS等与信息技 术相关的信息系统联系起来进行仿真研究。
30
仿真过程实施中涉及的主要技术关键
硬件与软件环境 仿真的网络规模及交通实体数
量一般受计算机软、硬件制约的。
计算经验 微观仿真中,跟车与换道模型需要的
步长一般为1到0.1秒。
(3)研究我国城市道路网络构造模型,重点是对不 同类型立交、路面状况及支线街道及车辆行驶 特点的定义;
(4)行人行为及其对道路交通流运行的影响模型。
29
技术关键
(5)合作与联系
现在,从事交通仿真研究的单位都是从自身情 况出发来开展工作,缺乏全国性的统一协作, 易造成重复性的研究,从而导致有限资金的浪 费;
20
交通仿真的目标是评价交通管理计划的行为效 果。交通研究的效果包括5个方面:
一是与出行效率相关的方面,如出行的速度、 时间等;
二是与交通安全相关的方面,包括车头时距、 事故等;
三是与交通环境相关的方面,如各种污染物的 排放及振动的产生等;
四是与旅客舒适相关的方面,如停站次数,密 度,拥挤水平等;紧张、舒适性等;
VAX 和RE6000机以及SUN机上运行。
微观仿真模型应用规模取决于计算机性能。 小规模:20km, 50个节点, 1000辆车; 大规模:200以上节点, 数千辆车; MICROSIM、PLANSIM-T与PARAMICS可以模拟
3000个节点、100万辆车(需用到并行计算机)。
计算速度取决于路网大小和计算机性能。一般来说仿
必须要明确建模目的和评价手段。
34
交通仿真模型的10个主要领域
道路物流与一般管理 需求管理 交通管理 停车管理 公交管理 交通信息 出行管理 货运与乘务组管理 车辆控制 内部服务系统
35
18
微观交通仿真系统的功能要求(1)
建立和处理不同形式的路网,清晰地表现路网
的几何形状,包括交通设施;
产生进入路网的不同种类的车辆以及车长、初
速度等,获得交通流各种统计数据;
处理车辆在路网上的运行情况,准确反映出车
辆间的相互作用;
处理网络内部对车流产生影响的发生点和吸纳
点;
跟踪路网内行使的任一辆车,真实地模拟交通
高速公路 AUTOBAHN FREEVU FRESIM MIXIC SISTM
二者兼有 AIMSUN2 CORSIM FLEXSYT II INTEGRATION MELROSE MICROSIM MITSIM PARAMICS PLANSIM-T TRANSIMS VISSIM
其他 ANATOLL PHAROS SHIVA SIMDAC
开发单位 卡特伦亚理工大学 设备技术研究中心 奔弛咨询公司 国家交通研究所 联邦公路局 利兹大学交通研究所
Deutsche Automobilgesellschaft mbH 联邦公路局 赫尔辛基理工大学 皇后大学交通教研室 科隆大学并行计算中心 麻省理工学院 爱丁堡并行计算中心与卡斯通有限公司 利兹大学交通研究所 罗阿拉莫斯国家实验室 MVA公司 PTV系统软件与咨询公司4来自交通仿真系统的用户群分类
基础设施的运营者与决策者 地方、公路交通部门当局(政府) 私人停车经营者 公交经营者 车辆控制 驾驶员与乘客 各类货物运输者与货主 设计与咨询机构
5
通用交通仿真软件
要在参考前人文献和研究现有模型的基础上,
确定系统的总体设计思想和要达到的主要目标 ;
需要开发具有个性的模型,以实现新的功能或
9
Single Road
(SR)
Regional
(R)
Corridor
(CO)
Project
Board (PB)
Intersection
(I)
City (CI) State Wide
(SW)
10
11
12
13
14
15
应用规模
大部分软件可在PC机或UNIX系统上运行。有个别在
大发展。目前,公开发表的道路交通仿真软件已 有近百个,有一定应用的软件系统也有数十个。
交通仿真软件的新用途是为智能交通系统(ITS)提
供论证手段。ITS应用的一个重要特点是要考察 整个网络的全局效果,近年来,针对ITS开发的 软件主要有DYNASMART、VISSIM、 INTEGRATION、MITSIM、THOREAU、 TRANSIMS、WATSIM与PLANSIM-T。
纠正已有模型的缺陷 ;
要对模型所用的参数进行校验和调整,得到符
合应用地区的模型和参数。
6
研究型和商业型交通仿真软件的区别
研究型的软件主要是给开发者自己用的,而商业
型的软件是给用户用的,两者的区别并不在于是 否市场上有得卖。
研究型的软件强调的是想法和模型的创新,而不
是软件的用户界面和使用价值。
用户界面 用户图形界面可显示的信息包括网络
、检测器、车辆移动的发生等。
与支持模块的通信 一般需要一个总控模块来协
调各模块之间的数据交流。
总控模块 主要功能是对各模块进行协调和实施
,模块间的信息交换需要通过处理器之间的通信
来完成。
31
32
国外交通仿真模型和系统难以在我国得到推 广的主要障碍:
国家 西班牙 法国 德国 法国 美国 英国 德国 美国 芬兰 加拿大 德国 美国 英国 英国 美国 英国 德国
8
微观交通仿真软件的适用范围
城市交通 CASIMIR DRACULA HUTSIM MICSTRAN NETSIM PADSIM SIGSIM SIMNET SITRA-B+ SITRAS THOREAU NEMIS