NGW型行星齿轮减速器——行星轮的设计要点
ngw行星齿轮传动效率
ngw行星齿轮传动效率摘要:一、引言二、NGW行星齿轮传动的基本原理1.结构组成2.工作原理三、NGW行星齿轮传动的效率影响因素1.材料选择2.设计参数3.加工工艺四、提高NGW行星齿轮传动效率的方法1.优化设计2.改进加工工艺3.合理选用材料五、结论正文:一、引言GW行星齿轮传动作为一种高效、可靠的传动方式,在工程机械、汽车、风力发电等领域得到了广泛应用。
然而,其传动效率问题一直是研究人员关注的焦点。
本文将探讨NGW行星齿轮传动的效率影响因素及提高方法。
二、NGW行星齿轮传动的基本原理1.结构组成GW行星齿轮传动主要由太阳轮、行星轮、内齿圈和齿轮架组成。
太阳轮与内齿圈固定,行星轮与齿轮架连接,通过行星轮的滚动实现动力传递。
2.工作原理在NGW行星齿轮传动中,太阳轮驱动行星轮旋转,行星轮与内齿圈齿啮合。
行星轮在旋转过程中,会受到齿轮架的制动力矩,从而实现动力在不同轴之间的传递。
三、NGW行星齿轮传动的效率影响因素1.材料选择材料的物理性能和机械强度直接影响齿轮传动的承载能力和传动效率。
选用高强度、耐磨损的材料可以提高传动效率。
2.设计参数设计参数包括齿数、模数、压力角、齿宽等。
合理的設計参数可以提高齿轮传动的传动效率。
3.加工工艺加工工艺对齿轮的精度和表面质量有很大影响。
采用先进的加工工艺,如数控加工、磨齿等,可以提高齿轮传动的传动效率。
四、提高NGW行星齿轮传动效率的方法1.优化设计根据实际工况,合理选择设计参数,使齿轮传动在满足承载能力的前提下,具有较高的传动效率。
2.改进加工工艺采用先进的加工工艺,提高齿轮的精度和表面质量,减少齿轮传动过程中的摩擦损失和能量损耗。
3.合理选用材料选择高强度、耐磨损的材料,提高齿轮传动的承载能力和传动效率。
五、结论通过分析NGW行星齿轮传动的原理、效率影响因素和提高方法,为工程技术人员提供了有益的参考。
NGW型行星齿轮减速器——行星轮的设计 (1).
目录一.绪论 (3)1.引言 (3)2.本文的主要内容 (3)二.拟定传动方案及相关参数 (4)1.机构简图的确定 (4)2.齿形与精度 (4)3.齿轮材料及其性能 (5)三.设计计算 (5)1.配齿数 (5)2.初步计算齿轮主要参数 (6)(1)按齿面接触强度计算太阳轮分度圆直径 (6)(2)按弯曲强度初算模数 (7)3.几何尺寸计算 (8)4.重合度计算 (9)5.啮合效率计算 (10)四.行星轮的的强度计算及强度校核 (11)1.强度计算 (11)2.疲劳强度校核 (15)1.外啮合 (15)2.内啮合 (19)3.安全系数校核 (20)五.零件图及装配图 (24)六.参考文献 (25)一.绪论1.引言渐开线行星齿轮减速器是一种至少有一个齿轮绕着位置固定的几何轴线作圆周运动的齿轮传动,这种传动通常用内啮合且多采用几个行星轮同时传递载荷,以使功率分流。
渐开线行星齿轮传动具有以下优点:传动比范围大、结构紧凑、体积和质量小、效率普遍较高、噪音低以及运转平稳等,因此被广泛应用于起重、冶金、工程机械、运输、航空、机床、电工机械以及国防工业等部门作为减速、变速或增速齿轮传动装置。
渐开线行星齿轮减速器所用的行星齿轮传动类型很多,按传动机构中齿轮的啮合方式分为:NGW、NW、NN、NGWN、ZU飞VGW、W.W等,其中的字母表示:N—内啮合,W—外啮合,G—内外啮合公用行星齿轮,ZU—锥齿轮。
NGW型行星齿轮传动机构的主要特点有:重量轻、体积小。
在相同条件下比硬齿面渐开线圆柱齿轮减速机重量减速轻1/2以上,体积缩小1/2—1/3;传动效率高;传动功率范围大,可由小于1千瓦到上万千瓦,且功率越大优点越突出,经济效益越高;装配型式多样,适用性广,运转平稳,噪音小;外齿轮为6级精度,内齿轮为7级精度,使用寿命一般均在十年以上。
因此NGW型渐开线行星齿轮传动已成为传动中应用最多、传递功率最大的一种行星齿轮传动。
2.本文的主要内容NGW型行星齿轮传动机构的传动原理:当高速轴由电动机驱动时,带动太阳轮回转,再带动行星轮转动,由于内齿圈固定不动,便驱动行星架作输出运动,行星轮在行星架上既作自转又作公转,以此同样的结构组成二级、三级或多级传动。
NGW型行星齿轮减速器设计

本科毕业论文(设计)题目 NGW型行星齿轮减速器设计学院工程技术学院专业机械设计制造及其自动化年级 2011级学号姓名指导教师(副教授)成绩 ____________________年月日目录摘要 (1)ABSTRACT. (2)0文献综述 (3)0.1行星轮的特点 (3)0.2发展概况 (4)1 传动方案的确定 (6)1.2行星机构的类型选择 (6)1.2.1行星机构的类型及特点 (6)1.1.2确定行星齿轮传动类型 (9)2 齿轮的设计计算 (10)2.1 配齿计算 (10)2.1.1确定各齿轮的齿数 (10)2.1.2初算中心距和模数 (11)2.2几何尺寸计算 (12)2.3 装配条件验算 (14)2.3.1 邻接条件 (14)2.3.2同心条件 (15)2.3.3安装条件 (15)2.4 齿轮强度校核 (16)2.4.1 a-c传动强度校核 (16)2.4.2 c-b传动强度校核 (20)3 轴的设计计算 (24)3.1行星轴设计 (24)3.2 转轴的设计 (26)3.2.1 输入轴设计 (26)3.2.2 输出轴设计 (27)4 行星架及相关部件 (29)4.1 行星架的设计与行星轮的支撑 (29)4.2行星架变形的计算和校核 (30)4.3浮动齿式联轴器的设计与计算 (30)4.4减速器的润滑 (31)4.4.1减速器润滑方式的选择 (31)4.4.2行星齿轮减速器润滑油的选择 (32)附录 (35)参考文献 (36)致谢 (38)NGW型行星齿轮减速器设计摘要:本文介绍了NGW型行星齿轮减速器的设计过程。
它具有行星齿轮传动的通用的优点,比如:质量小、体积小、传动比大、承载能力大以及传动平稳和传动效率高等优点。
因此,行星齿轮传动在起重运输、工程机械、冶金矿山、石油化工、建筑机械、轻工纺织等工业部门均获得了广泛的应用。
首先介绍了行星齿轮减速器的应用背景及发展趋势。
接下来是选定型号的行星齿轮减速器的具体设计过程,包括行星机构的类型选择,齿轮齿数的确定,齿轮强度的校核,轴和键的尺寸及强度校核,行星齿轮减速器的结构设计等组成部分。
NGW型行星齿轮减速器-行星轮设计要点

目录一.绪论 (3)1.引言 (3)2.本文的主要内容 (3)二.拟定传动方案及相关参数 (4)1.机构简图的确定 (4)2.齿形与精度 (4)3.齿轮材料及其性能 (5)三.设计计算 (5)1.配齿数 (5)2.初步计算齿轮主要参数 (6)(1)按齿面接触强度计算太阳轮分度圆直径 (6)(2)按弯曲强度初算模数 (7)3.几何尺寸计算 (8)4.重合度计算 (9)5.啮合效率计算 (10)四.行星轮的的强度计算及强度校核 (11)1.强度计算 (11)2.疲劳强度校核 (15)1.外啮合 (15)2.内啮合 (19)3.安全系数校核 (20)五.零件图及装配图 (24)六.参考文献 (25)一.绪论1.引言渐开线行星齿轮减速器是一种至少有一个齿轮绕着位置固定的几何轴线作圆周运动的齿轮传动,这种传动通常用内啮合且多采用几个行星轮同时传递载荷,以使功率分流。
渐开线行星齿轮传动具有以下优点:传动比范围大、结构紧凑、体积和质量小、效率普遍较高、噪音低以及运转平稳等,因此被广泛应用于起重、冶金、工程机械、运输、航空、机床、电工机械以及国防工业等部门作为减速、变速或增速齿轮传动装置。
渐开线行星齿轮减速器所用的行星齿轮传动类型很多,按传动机构中齿轮的啮合方式分为:NGW、NW、NN、NGWN、ZU飞VGW、W.W等,其中的字母表示:N—内啮合,W—外啮合,G—内外啮合公用行星齿轮,ZU—锥齿轮。
NGW型行星齿轮传动机构的主要特点有:重量轻、体积小。
在相同条件下比硬齿面渐开线圆柱齿轮减速机重量减速轻1/2以上,体积缩小1/2—1/3;传动效率高;传动功率范围大,可由小于1千瓦到上万千瓦,且功率越大优点越突出,经济效益越高;装配型式多样,适用性广,运转平稳,噪音小;外齿轮为6级精度,内齿轮为7级精度,使用寿命一般均在十年以上。
因此NGW型渐开线行星齿轮传动已成为传动中应用最多、传递功率最大的一种行星齿轮传动。
2.本文的主要内容NGW型行星齿轮传动机构的传动原理:当高速轴由电动机驱动时,带动太阳轮回转,再带动行星轮转动,由于内齿圈固定不动,便驱动行星架作输出运动,行星轮在行星架上既作自转又作公转,以此同样的结构组成二级、三级或多级传动。
煤矿机械NGW行星齿轮传动行星轮轴承设计探讨
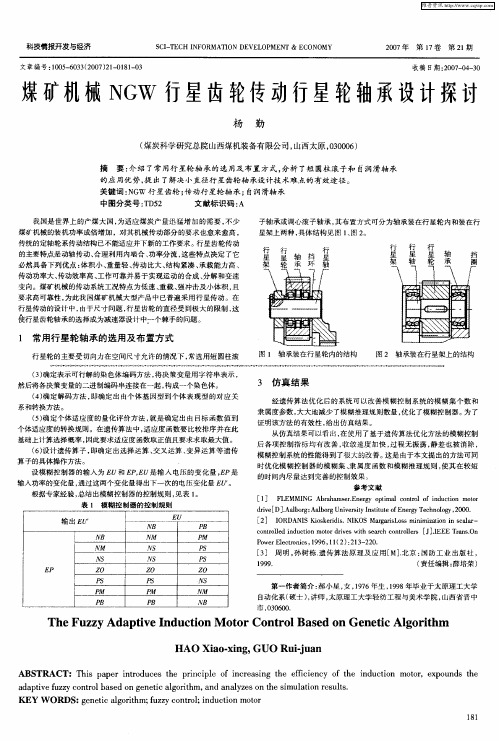
图 1 轴 承装在行 星轮 内的结构
图 2 轴承装在行星架上的结构
3 仿 真 结果
经遗 传算法优化后 的系统可 以改善模糊控制 系统 的模糊 集个数 和 隶属度参数 , 大大地减少 了模糊推理规则数量 , 优化了模 糊控制器 。 了 为
证 明该方法 的有效性 , 出仿真结果。 给 从仿真结果可以看 出, 在使用 了基于遗传算法优化方法 的模糊控制 后 各项 控制指标均有 改善 , 收敛 速度加快 , 程无振荡 , 差也被消除 , 过 静 模糊控制系统 的性能得到了很大的改善。这是 由于本文提 出的方法可 同 时优化模 糊控制器 的模 糊集 、 属度 函数和模糊 推理规则 , 其在较短 隶 使 的时间 内尽量达到完善的控制效果。
21短圆柱滚子的应用211短圆柱滚子的结构短圆柱滚子安装在行星轮内孔和行星轴之间见图3用行星轮内孔充当轴承滚子的外圈滚道行星轴外圆柱面充当轴承滚子的内圈滚道在内外滚道间充填短圆柱滚子在圆周上排列的短圆柱滚子间设有保持架在轴向方向的排与排之间用青铜隔环间隔防止排与排之间的干涉这样短圆柱滚子行星齿轮行星轴和隔环等共同组成行星齿轮轴承
PS PS
ZD
NM
Ns Ns
[] 周明, 3 孙树 栋. 传算法 原理及 应用 [ . 京 : 遗 M] 北 国防 工业 出版社 ,
19. 9 9 ( 责任编辑 : 薛培荣 )
EP
zo
zo
PS
PS
Ns
NM
第 一作者简 介 : 郝小星 , ,9 6年生 ,9 8年毕业 于太原 理工大学 女 17 19
1 常用 行星 轮轴 承的 选用及 布 置方 式
行星轮的主要受 切向力在空间尺寸允许 的情况 下 , 常选用短圆柱滚 () 3 确定表示可行解 的染 色体编码方 法 , 将决策变量用字符 串表示 ,
NGWN(III)型行星轮减速器设计
NGWN(III)型行星轮减速器设计1 前言随着现代化工业的发展,机械化和自动化水平不断地提高,各工业部门需要大量的减速器,并要求减速器的体积小、重量轻、传动比大、效率高、承载能力大、运转可靠和寿命长等。
而行星齿轮传动具有减速比大、传动效率高、结构小巧、承载能力强等优点,在许多情况下可代替二级、三级的普通齿轮减速器和涡轮减速器,因此行星轮减速器被广泛应用于各个方面。
行星传动不仅适用于高转速、大功率,而且在低速大转矩的传动装置上也已获得广泛的应用,所以目前行星传动技术已成为世界各国机械传动重点之一。
目前国外的减速器,以德国、丹麦和日本处于领先地位,在结构优化、传动性能,传动功率、转矩和速度等方面均处于领先地位,并出现一些新型的行星传动技术,如封闭行星齿轮传动、行星齿轮变速传动和微型行星齿轮传动等早已在现代化的机械传动设备中获得了成功的应用。
行星轮减速装置经过一个多世纪的发展设计理论及制造技术有了很大的进步,而且与新技术革命的发展紧密结合。
当今世界行星轮减速装置总的发展趋势是向着大功率、大传动比、小体积、高机械效率、高的承载能力以及利用寿命长的目标发展,而且其重量更轻,噪声更低,效率更高,可靠性也更高。
目前世界各国由工业化信息化时代正在进入知识化时代,行星轮在设计上的研究也趋于完善,制造技术也不断改进。
行星齿轮传动类型很多,行星齿轮传动根据基本够件的组成情况可分为:2K—H、3K、及K—H—V三种。
若按各对齿轮的啮合方式,又可分为:NGW型、NN型、WW型、WGW 型、NGWN型和N型等。
我所研究的NGWN(III)行星齿轮属于3Z型行星齿轮传动的一种。
本文主要对NGWN(III)齿轮减速器设计方法进行了探讨,主要内容包括齿轮传动比的分配计算,主要零部件参数设计,标准零部件的选用,以及减速器中零件三维模型的设计。
2 选题背景2.1 题目来源生产实际2.2 研究的目的与意义由于行星轮齿轮减速器具有质量小、体积小、传动比大以及效率高等优点,因此行星轮减速器被广泛应用于工程机械、矿山机械、冶金机械、起重运输机械、飞机、轮船等各个方面。
NGWN型行星减速器的优化设计

3.1.2 建立配齿目标函数 行星轮系配齿优化设计应在满足同心条件、
邻接条件、装配条件下, 求出各轮齿数和传动比误 差, 使传动比误差满足传动精度要求, 则目标函数 可表示为:
第一步根据行星轮系传动比的取值范围, 在
满足同心条件、邻接条件、装配条件下, 进行配齿
优化设计, 求出各轮齿数和传动比误差, 使传动比
4.2.2 齿宽约束
4.2.3 轮齿弯曲强度约束
对 NGWN 行星减速器, 当齿面硬度 HB>350
时, 只计算齿轮的齿弯曲强度。根据对直齿圆柱齿
轮的齿弯曲强度要求
得[1]:
然 后 计 算 齿 宽 系 数 Φd=bmin/d, (d 为 齿 轮 的 分 度圆直径)。齿宽系数在许用范围内就行, 否则应加 大模数。根据式( 5) 计算出行星轮最小齿宽 b1、b2, 然后计算出齿宽系数 Φd, 齿宽系数在 0.3- 0.6 的范 围内即满足要求。整个计算过程可用 C++语言编 成了计算程序, 在计算机上可顺利运行。经强度优 化计算后, 模数必须为标准值, 齿宽也应圆整为整 数, 故需将最优解圆整到符合工程要求的值。最后 得到符合工程要求的值。
误差满足传动精度要求作为目标函数。
第二步调用第一步可行的齿数组合方案, 对
行星齿轮减速器各齿轮进行强度优化设计, 使行
星齿轮减速器体积最小作为目标函数。
图 1 NGWN 型行星齿轮减速器传动简图
3.2 确定配齿计算约束条件 3.2.1 同心条件
根据行星齿轮传动中, 各对相互啮合齿轮的中 心距应相等的同心条件, 即由行星减速器三个啮合 齿轮副 a- g、g- b、f- e 的中心距: 关系可换为:
- 49 -
《机 电 技 术 》2007 年 第 3 期
行星齿轮减速器的设计

行星齿轮减速器的设计一、传动比计算行星齿轮减速器的传动比是根据其结构和工作原理来计算的。
首先,需要确定减速器的级数和各级齿轮的齿数、模数、螺旋角等参数。
然后,根据这些参数和相关公式计算出减速器的传动比。
二、齿轮设计齿轮设计是行星齿轮减速器设计的核心环节,包括齿轮类型选择、齿轮精度确定、齿轮材料和热处理选择、齿轮强度计算等。
此外,还需要根据减速器的工作环境和工况条件,对齿轮进行优化设计,以提高其承载能力和使用寿命。
三、轴承选择轴承是行星齿轮减速器中非常重要的部件,其选择应根据载荷的大小、方向和转速等因素来确定。
对于行星齿轮减速器,常用的轴承类型包括球轴承和滚子轴承。
在选择轴承时,应考虑其尺寸、载荷容量、极限转速和极限寿命等参数。
四、箱体结构设计箱体是行星齿轮减速器的支撑和固定部件,其结构设计应考虑减速器的安装方式和整体布局。
同时,箱体结构应具有良好的刚度和强度,能够承受较大的动载荷和静载荷。
此外,箱体结构还应具有良好的散热性能和密封性能。
五、润滑与散热设计润滑与散热是行星齿轮减速器正常运行的必要条件。
润滑设计主要是确定润滑油或润滑脂的类型、添加量和润滑方式。
散热设计主要是通过合理的散热结构和散热面积来降低减速器的温度。
六、热负荷与疲劳强度校核热负荷与疲劳强度校核是行星齿轮减速器设计的重要环节,主要目的是确保减速器在正常工作时不会因过热或疲劳而损坏。
通过热负荷与疲劳强度校核,可以确定减速器的安全系数和使用寿命。
七、强度与刚度计算强度与刚度计算是行星齿轮减速器设计的关键环节,主要目的是确保减速器在工作过程中具有良好的稳定性和可靠性。
通过强度与刚度计算,可以确定减速器的各部件尺寸和材料类型,以满足工作需求。
八、优化与改进在完成初步设计后,还需要对行星齿轮减速器进行优化和改进。
这包括对各部件的优化设计、对整体结构的改进等。
通过优化与改进,可以提高减速器的性能、降低制造成本和提高生产效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录一.绪论 (3)1.引言 (3)2.本文的主要内容 (3)二.拟定传动方案及相关参数 (4)1.机构简图的确定 (4)2.齿形与精度 (4)3.齿轮材料及其性能 (5)三.设计计算 (5)1.配齿数 (5)2.初步计算齿轮主要参数 (6)(1)按齿面接触强度计算太阳轮分度圆直径 (6)(2)按弯曲强度初算模数 (7)3.几何尺寸计算 (8)4.重合度计算 (9)5.啮合效率计算 (10)四.行星轮的的强度计算及强度校核 (11)1.强度计算 (11)2.疲劳强度校核 (15)1.外啮合 (15)2.内啮合 (19)3.安全系数校核 (20)五.零件图及装配图 (24)六.参考文献 (25)一.绪论1.引言渐开线行星齿轮减速器是一种至少有一个齿轮绕着位置固定的几何轴线作圆周运动的齿轮传动,这种传动通常用内啮合且多采用几个行星轮同时传递载荷,以使功率分流。
渐开线行星齿轮传动具有以下优点:传动比范围大、结构紧凑、体积和质量小、效率普遍较高、噪音低以及运转平稳等,因此被广泛应用于起重、冶金、工程机械、运输、航空、机床、电工机械以及国防工业等部门作为减速、变速或增速齿轮传动装置。
渐开线行星齿轮减速器所用的行星齿轮传动类型很多,按传动机构中齿轮的啮合方式分为:NGW、NW、NN、NGWN、ZU飞VGW、W.W等,其中的字母表示:N—内啮合,W—外啮合,G—内外啮合公用行星齿轮,ZU—锥齿轮。
NGW型行星齿轮传动机构的主要特点有:重量轻、体积小。
在相同条件下比硬齿面渐开线圆柱齿轮减速机重量减速轻1/2以上,体积缩小1/2—1/3;传动效率高;传动功率范围大,可由小于1千瓦到上万千瓦,且功率越大优点越突出,经济效益越高;装配型式多样,适用性广,运转平稳,噪音小;外齿轮为6级精度,内齿轮为7级精度,使用寿命一般均在十年以上。
因此NGW型渐开线行星齿轮传动已成为传动中应用最多、传递功率最大的一种行星齿轮传动。
2.本文的主要内容NGW型行星齿轮传动机构的传动原理:当高速轴由电动机驱动时,带动太阳轮回转,再带动行星轮转动,由于内齿圈固定不动,便驱动行星架作输出运动,行星轮在行星架上既作自转又作公转,以此同样的结构组成二级、三级或多级传动。
NGW型行星齿轮传动机构主要由太阳轮、行星轮、内齿圈及行星架所组成,以基本构件命名,又称为ZK-H型行星齿轮传动机构。
本设计的主要内容是单级NGW型行星减速器的设计。
二.拟定传动方案及相关参数1.机构简图的确定减速器传动比i=6,故属于1级NGW型行星传动系统。
n=2或3。
从提高传动装置查《渐开线行星齿轮传动设计》书表4-1确定pn=3。
承载力,减小尺寸和重量出发,取p计算系统自由度W=3*3-2*3-2=12.齿形与精度因属于低速传动,以及方便加工,故采用齿形角为20º,直齿传动,精度定位6级。
3.齿轮材料及其性能太阳轮和行星轮采用硬齿面,内齿轮采用软齿面,以提高承载能力,减小尺寸。
三.设计计算1.配齿数采用比例法:::::(2)2:(1):()a c b a a a a p Z Z Z M Z Z i i Z Z i n =--:2:5:2a a a a Z Z Z Z =按齿面硬度HRC=60,()c a uZ /Z 62/22==-=,查《渐开线行星齿轮传动设计》书图4-7a 的max20a Z =,1320a Z <<。
取17a Z =。
由传动比条件知:Y i 17*6102a Z ===M Y /3102/334===计算内齿轮和行星齿轮齿数: Y 1021785b a Z Z =-=-=234c a Z Z =*=2.初步计算齿轮主要参数(1)按齿面接触强度计算太阳轮分度圆直径用式()32lim1A p d Ha H a tdT K K K u ud K ϕσ∑±=进行计算,式中系数:u=34172c a Z Z ==,太阳轮传递的扭矩()a p a T 9549P /n n 954930/3100954.9 N m ==**=⋅则太阳轮分度圆直径为:()32lim1768103.76 mmA p d Ha H a tdT K K u ud K ϕσ∑±==⨯=(2)按弯曲强度初算模数用式1321A Fp tm d T K KmKZ ϕσ=进行计算。
由2lim 212lim 1245 3.182.54306.73350 F Fa Fa F Y Y N mm σσ=⨯=<=,所以应按行星轮计算模数3212.15.64a A Fp tmd a T K K m K Z ϕσ==⨯=若取模数6m =,则太阳轮直径()176102 mm a ad Z m ==⨯=,与接触强度初算结果()103.76 mm a d =接近,故初定按()108.5 mm a d =,6m =进行接触和弯曲疲劳强度校核计算。
3.几何尺寸计算将分度圆直径、节圆直径、齿顶圆直径的计算值列于表4。
4.重合度计算外啮合:()()a a a c m Z 2617251 ()26342102()2114257 ()2162108()(r)cos ())51cos 2057()(r)cos ())102cos 20108(r)=arccos(arccos()32.78arccos(arccos()27.441c c a a a a a c a c a a a a a c a c r m Z r d r d r r ααααε︒︒︒︒=⨯===⨯=============[](tan()tan )(tan()tan )=17(tan 32.78tan 20)34(tan 27.441tan 20(2)=1.598>1.2a a a c a c Z Z αααααππ︒︒︒︒=-+-⎡⎤-+-⎣⎦内啮合:()()b b b c m Z 26852255 ()26342102()24952247.5 ()2162108()(r)cos ())255cos 20()(r)cos ())102cos 20108(r)=arccos(arccos()14.50arccos(arccos()27.c c a b a b a c a c a b a b a c a c r m Z r d r d r r αααα︒︒︒=⨯===⨯=============[](tan()tan )(tan()tan )=34(tan 27.441tan 20)85(tan14.50tan 20)(2)=2.266>1.2441c a c b a b Z Z αεααααππ︒︒︒︒︒=---⎡⎤---⎣⎦5.啮合效率计算11X Xbab aXXabi i ηηη-==-式中Xη为转化机构的效率,可用Kyдpявпев计算法确定。
查图3-3a 、b (取µ=0.06,因齿轮精度高)得:各啮合副的效率为0.978X ac η=,0.997X cb η=,转化机构效率为0.9870.9970.984X X ac cb X ηηη==⨯=转化机构传动比85517b a XabZ Z i=-=-=-则1150.9840.987115X Xb abaX Xabiiηηη-+⨯====-+.四.行星轮的的强度计算及强度校核1.强度计算图1 断面几何参数行星轮可归结为受内外载荷的封闭圆环,其弯曲半径与断面厚度之比5/hρ,属于大曲率圆环,弯曲中性层不通过重心,相距为e。
当轴承装在行星轮内时,其轮缘减薄,若3/mh时,在载荷作用下有较大变形。
此变形对齿轮弯曲强度和轴承的承载能力有显著影响,应准确且计算。
但在设计时由于轴承上载荷大小和分布规律不清楚,而难以计算。
这里设想轴承中反力按余弦规律分布,并且不考虑离心力对轴承载荷的影响,作一简化计算。
图2 计算简图及弯矩分布 表6行星轮轮缘强度计算公式外载荷危险断面的弯矩])1cos[(42t tt t t 't t 't ϕπρα-====i F q H F M tg F F n d K T F r pa AaραρραρHtg F M Htg F M 138.0182.011.0()5.0318.0094.0('t t 2't t 1-+=++-=危险断面的轴向力 轮缘外侧弯曲应力)637.05.0796.0(0't 21ραH tg F N N i +-== ωωσρσσρσ+++=+++=SN h Se h M SN h Se h M 1''1min2''2max )()( 在与内、外齿中心轮啮合处分别有一组相等且对称的载荷:圆周力t F 、径向力r F 和t F 对弯曲中心的力矩t M 。
在圆周力t F 相背的一半轴承上作用有按余弦规律分布的径向分布力i q 。
载荷计算式如表6。
内力素弯矩ϕM 在两个啮合节点,即断面1处达最小值,在与断面1成︒90断面2处达最大值。
这两个断面的弯矩1M 、2M 和轴向力1N 、2N 的计算式列于表6。
最大、最小应力都发生在轮缘的外侧,为弯曲应力、轴向应力和离心应力之和。
内力素及应力计算公式列于。
其中离心力产生的应力202ρωγσωg=式中 γ——齿轮材料的比重;322ππγ==p ng ——重力加速度;ω——齿轮的绝对角速度;()s rad n /33.526050*2602===ππω0ρ——轮缘断面重心位置的曲率半径。
使用表6中的公式时,要从实际断面尺寸换算出一个相当矩形断面,才能较准确的求出应力的大小和位置。
相当断面的惯性矩为2min min a S I I +=式中min min S I 、——实际断面对OX 轴的惯性矩和断面面积;a ——系数,按经验公式确定:167.4)6*3.05.44(*6*25.0)3.0(25.0min =+=+=m h m am in h ——不计轮齿时的断面厚度;5.44min =hm ——齿轮模数。
相当断面的宽度取为轮缘的实际宽度b ,其高度h 、面积S 、断面系数W 分别为:实际断面尺寸()100d 72==孔,b36300655*726;396055*72;557212122233=========bh W bh S b h396055*72,9982501255*7212min 33min======bh S bh I 1067011167.4*396099825022min min =+=+=a S I I断面的弯曲半径为e -=0ρρ;25.720=ρ,而73.33960*25.7210670110===SI e ρ52.6873.325.720=-=-=e ρρ)/(29925.72*33.52*10*32222202mm N g===πρωγσω 断面上承受最大、最小应力处到断面重心的距离为'h 和''h 。