双线性内插法
双线性插值法(bilinearinterpolation)
双线性插值法(bilinearinterpolation)前⾯讲解了最近邻插值法缩放图像以及不⾜之处,本篇介绍另外⼀种插值法,介绍双线性插值法之前先介绍线性插值。
1. 线性插值 线性插值是指插值函数为⼀次多项式的插值⽅式,其在插值节点上的插值误差为零。
线性插值可以⽤来近似代替原函数,也可以⽤来计算得到查表过程中表中没有的数值。
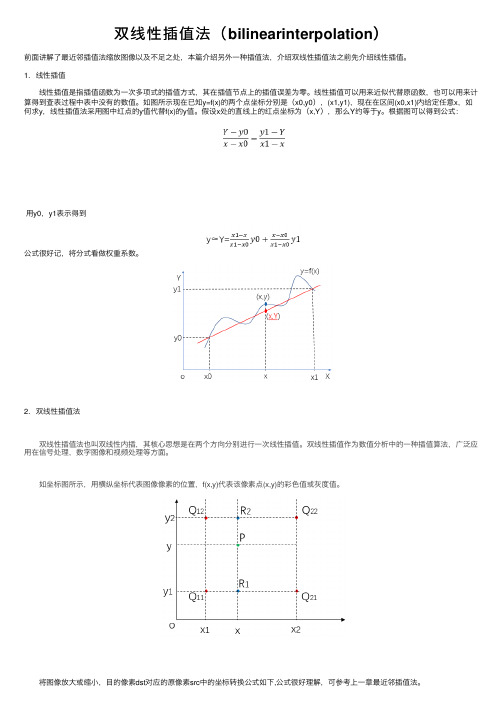
如图所⽰现在已知y=f(x)的两个点坐标分别是(x0,y0),(x1,y1),现在在区间(x0,x1)内给定任意x,如何求y,线性插值法采⽤图中红点的y值代替f(x)的y值。
假设x处的直线上的红点坐标为(x,Y),那么Y约等于y。
根据图可以得到公式:⽤y0,y1表⽰得到公式很好记,将分式看做权重系数。
2. 双线性插值法 双线性插值法也叫双线性内插,其核⼼思想是在两个⽅向分别进⾏⼀次线性插值。
双线性插值作为数值分析中的⼀种插值算法,⼴泛应⽤在信号处理,数字图像和视频处理等⽅⾯。
如坐标图所⽰,⽤横纵坐标代表图像像素的位置,f(x,y)代表该像素点(x,y)的彩⾊值或灰度值。
将图像放⼤或缩⼩,⽬的像素dst对应的原像素src中的坐标转换公式如下,公式很好理解,可参考上⼀章最近邻插值法。
srcX=dstX*(srcWidth/dstWidth) srcY=dstY*(srcHeight/dstHeight) 上式中,dstX与dstY为⽬标图像的某个像素的横纵坐标,dstWidth与dstHeight为⽬标图像的长与宽;srcWidth与srcHeight为原图像的宽度与⾼度。
srcX,srcY为⽬标图像在该点(dstX,dstY)对应的原图像的坐标。
现在假设⽬标图像的像素点(x’,y’)映射到原图像中是(x,y),也就是图中的P点。
设Q11 = (x1, y1)、Q12 = (x1, y2)、Q21 = (x2, y1) 、Q22 = (x2, y2),图中Q11,Q12,Q21,Q22分别为距离P点的最近的四个点。
双线性插值图像放大算法优化及硬件实现

2、双线性插值硬件加速器设计
基于FPGA的双线性插值硬件加速器主要由输入模块、计算模块和输出模块三 部分组成。其中,输入模块负责接收来自外部的图像数据;计算模块负责执行双 线性插值算法;输出模块负责将计算结果输出到外部设备。
2、双线性插值硬件加速器设计
在计算模块中,我们采用了基于加权平均法和边缘保护法的双线性插值算法。 具体来说,我们对四个相邻像素点进行加权平均,并根据目标像素点的位置关系 分配不同的权重。同时,我们还会对目标像素点的周围像素点进行判断,如果存 在边缘信息,则会保护这些信息不被丢失。
2、双线性插值硬件加速器设计
在实现过程中,我们采用了Verilog硬件描述语言来编写算法的硬件实现代码。 在代码编写过程中,我们采用了流水线架构和并行计算技术,提高了算法的执行 效率。我们还采用了一些优化技巧,如逻辑优化、时序优化等,提高了硬件加速 器的性能和稳定性。
3、实验结果与分析
3、实验结果与分析
双线性插值图像放大算法优 化及硬件实现
目录
01 一、双线性插值算法 的优化
03 参考内容
02
二、双线性插值算法 的硬件实现
内容摘要
随着图像处理技术的发展,图像放大已成为图像处理中一个重要的环节。在 图像放大过程中,由于分辨率的降低和图像信息的损失,图像的质量往往会受到 严重影响。为了提高图像的质量,可以采用插值算法对图像进行放大。其中,双 线性插值算法是一种常用的方法,它通过对图像中相邻的四个像素点进行线性插 值,得到放大后的像素值。
2、边缘保护法
2、边缘保护法
在双线性插值算法中,当目标像素点位于图像边缘时,其周围的四个相邻像 素点可能会缺失。这时,如果直接进行线性插值,会导致放大后的图像边缘模糊 甚至出现黑边。为了解决这个问题,我们引入了边缘保护法。具体来说,我们在 计算目标像素点的值时,会根据其周围的像素点的位置关系,给它们分配不同的 权重。这样就可以更好地保护图像的边缘信息,提高图像的质量。
内插法的计算公式

内插法的计算公式在数学和金融等领域,内插法是一种常用的计算方法,它能够帮助我们在已知的数据点之间估算未知的值。
内插法的应用范围广泛,从科学研究到金融分析,都能看到它的身影。
那什么是内插法呢?简单来说,就是在已知的两个点之间,根据一定的规律和假设,推测出中间未知点的值。
为了实现这个目的,我们需要用到内插法的计算公式。
内插法的基本原理基于线性关系。
假设我们有两个已知点(x₁, y₁) 和(x₂, y₂),现在要估算一个位于 x₁和 x₂之间的 x 所对应的 y 值。
内插法的计算公式为:y = y₁+(y₂ y₁) /(x₂ x₁) ×(xx₁)我们来逐步拆解这个公式,以便更好地理解。
首先,(y₂ y₁) /(x₂ x₁) 这个部分表示的是两个已知点之间的斜率。
斜率反映了数据的变化趋势。
然后,(x x₁) 表示我们要估算的点与已知点x₁之间的水平距离。
最后,将这两个部分相乘,就得到了在这个斜率下,水平距离所对应的垂直变化量。
再加上 y₁,就得到了估算的 y 值。
为了更直观地理解内插法的计算公式,我们来看一个实际的例子。
假设某商品的价格与销售量之间存在一定的关系。
已知当价格为 10 元时,销售量为 500 件;当价格为 15 元时,销售量为 300 件。
现在我们想知道当价格为 12 元时,销售量大概是多少。
首先,x₁= 10,y₁= 500,x₂= 15,y₂= 300。
斜率=(300 500) /(15 10) =-40然后,x = 12,x₁= 10垂直变化量=-40 ×(12 10) =-80最后,y = 500 +(-80) = 420所以,当价格为 12 元时,估计销售量为 420 件。
内插法不仅在简单的线性关系中有用,在一些稍微复杂的情况中,比如曲线关系,也可以通过分段线性化等方法来应用内插法。
再比如,在金融领域,计算债券的到期收益率时,可能会用到内插法。
已知两个不同利率下债券的价格,要估算某个特定价格对应的利率,就可以借助内插法。
图像插值技术——双线性插值法
图像插值技术——双线性插值法在图像处理中,如果需要对图像进⾏缩放,⼀般可以采取插值法,最常⽤的就是双线性插值法。
本⽂⾸先从数学⾓度推导了⼀维线性插值和⼆维线性插值的计算过程,并总结了规律。
随后将其应⽤到图像的双线性插值上,利⽤Matlab编程进⾏图像的缩放验证,实验证明,⼆维线性插值能够对图像做出较好的缩放效果。
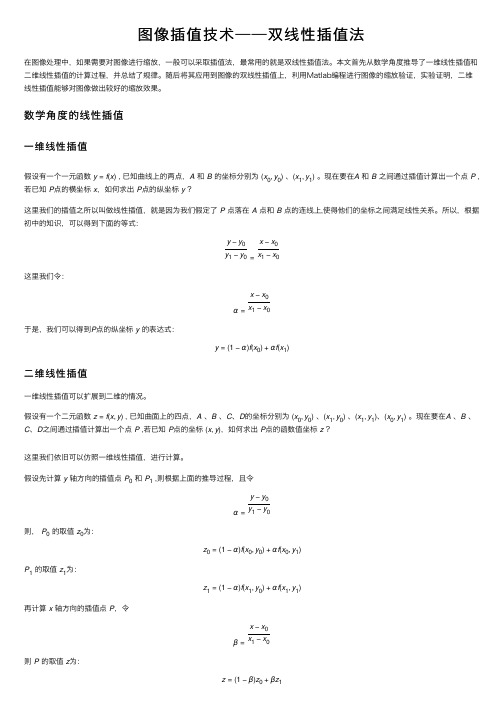
数学⾓度的线性插值⼀维线性插值假设有⼀个⼀元函数 y=f(x) , 已知曲线上的两点,A 和 B 的坐标分别为 (x0,y0) 、(x1,y1) 。
现在要在A 和 B 之间通过插值计算出⼀个点 P ,若已知 P点的横坐标 x,如何求出 P点的纵坐标 y ?这⾥我们的插值之所以叫做线性插值,就是因为我们假定了 P 点落在 A 点和 B 点的连线上,使得他们的坐标之间满⾜线性关系。
所以,根据初中的知识,可以得到下⾯的等式:y−y0 y1−y0=x−x0 x1−x0这⾥我们令:α=x−x0 x1−x0于是,我们可以得到P点的纵坐标 y 的表达式:y=(1−α)f(x0)+αf(x1)⼆维线性插值⼀维线性插值可以扩展到⼆维的情况。
假设有⼀个⼆元函数 z=f(x,y) , 已知曲⾯上的四点,A 、B 、C、D的坐标分别为 (x0,y0) 、(x1,y0) 、(x1,y1)、(x0,y1) 。
现在要在A 、B 、C、D之间通过插值计算出⼀个点 P ,若已知 P点的坐标 (x,y),如何求出 P点的函数值坐标 z ?这⾥我们依旧可以仿照⼀维线性插值,进⾏计算。
假设先计算 y 轴⽅向的插值点 P0 和 P1 ,则根据上⾯的推导过程,且令α=y−y0 y1−y0则, P0 的取值 z0为:z0=(1−α)f(x0,y0)+αf(x0,y1) P1 的取值 z1为:z1=(1−α)f(x1,y0)+αf(x1,y1)再计算 x 轴⽅向的插值点 P,令β=x−x0 x1−x0则 P 的取值 z为:z=(1−β)z0+βz1整理得到下⾯的式⼦:z =(1−β)(1−α)f x 0,y 0+αf x 0,y 1+β(1−α)f x 1,y 0+αf x 1,y 1=(1−β)(1−α)f x 0,y 0+(1−β)αf x 0,y 1+β(1−α)f x 1,y 0+βαf x 1,y 1⼩结由⼀维线性插值过渡到⼆维线性插值,我们发现,⼆者在表达式上有相似的规律:⼀维线性插值:y =f (x )α=x p −x 0x 1−x 0y p =(1−α)f x 0+αf x 1⼆维线性插值:z =f (x ,y )α=x p −x 0x 1−x 0,β=y p −y 0y 1−y 0z p =(1−β)(1−α)f x 0,y 0+(1−β)αf x 0,y 1+β(1−α)f x 1,y 0+βαf x 1,y 1图像中的双线性插值我们可以⽤函数来表⽰⼀幅图像(假设为单通道)。
遥感影像镶嵌方法

遥感影像镶嵌方法(最新版4篇)篇1 目录1.遥感影像镶嵌方法的定义和重要性2.遥感影像镶嵌方法的分类3.常用的遥感影像镶嵌方法及其特点4.遥感影像镶嵌方法的应用案例5.遥感影像镶嵌方法的发展趋势篇1正文遥感影像镶嵌方法是指将多个遥感影像拼接在一起,形成一个更大范围、更高分辨率的遥感影像。
在遥感领域,镶嵌技术具有重要意义,因为它可以提高遥感数据的空间分辨率和时间分辨率,增强遥感数据的应用价值。
遥感影像镶嵌方法主要分为两类:线性镶嵌方法和非线性镶嵌方法。
线性镶嵌方法包括线性内插法、双线性内插法等,其特点是计算简单、易于实现,但可能引入误差。
非线性镶嵌方法包括非线性内插法、三次埃尔米特插值法等,其特点是可以减小误差,但计算复杂度较高。
常用的遥感影像镶嵌方法有以下几种:1.线性内插法:通过计算影像之间的线性关系,实现遥感影像的镶嵌。
此方法简单易行,但可能引入误差。
2.双线性内插法:在线性内插法的基础上,加入水平和垂直方向的插值,实现更高精度的遥感影像镶嵌。
3.非线性内插法:通过非线性方程组求解,实现遥感影像的镶嵌。
此方法可以减小误差,但计算复杂度较高。
4.三次埃尔米特插值法:利用三次埃尔米特插值函数,实现遥感影像的高精度镶嵌。
此方法具有较高的插值精度,但计算复杂度较高。
遥感影像镶嵌方法在多个领域有广泛应用,如地质勘探、环境监测、城市规划等。
例如,在地质勘探中,通过将多个遥感影像拼接在一起,可以形成高分辨率的地质构造图,为地质勘探提供重要依据。
随着遥感技术的发展,遥感影像镶嵌方法也在不断完善和优化。
未来的发展趋势包括提高镶嵌精度、简化计算过程、提高自动化程度等。
篇2 目录1.遥感影像镶嵌方法的定义2.遥感影像镶嵌方法的种类3.镶嵌方法的优缺点分析4.镶嵌方法在实际应用中的案例5.我国在遥感影像镶嵌方法的研究和应用现状篇2正文遥感影像镶嵌方法是指将多个遥感影像拼接在一起,形成一个大范围、高分辨率的遥感影像。
图像插值算法

常用图像插值算法分析与比较摘要:插值算法在图像缩放处理中是一项基本且重要的问题。
插值算法有多种,最常用的有最近邻插值、双线性插值以及立方卷积插值。
本文对三种插值算法进行简单分析并对它们的处理结果加以比较,最后总结了三种算法各自的优缺点。
关键词:图像处理;最近邻插值;双线性插值;立方卷积插值1 引言图像几何变换包括平移、转置、镜像和缩放等。
其中前三种操作变换中,输出图像的每一个像素点在输入图像中都有一个具体的像素点与之对应。
但是,在缩放操作中,输出图像像素点坐标有可能对应于输入图像上几个像素点之间的位置,这个时候就需要通过灰度插值处理来计算出该输出点的灰度值[1]。
图像插值是图像超分辨处理的重要环节,不同的插值算法有不同的精度,插值算法的好坏也直接影响着图像的失真程度。
最常用的插值算法有三种:最近邻插值、双线性插值、立方卷积插值,其中使用立方卷积插值达到的效果是最佳的。
2 几种插值算法原理分析插值算法所应用的领域较多,对图像进行缩放处理是比较典型的应用,由于图像像素的灰度值是离散的, 因此一般的处理方法是对原来在整数点坐标上的像素值进行插值生成连续的曲面, 然后在插值曲面上重新采样以获得缩放图像像素的灰度值。
缩放处理从输出图像出发,采用逆向映射方法,即在输出图像中找到与之对应的输入图像中的某个或某几个像素,采用这种方法能够保证输出图像中的每个像素都有一个确定值,否则,如果从输入图像出发来推算输出图像,输出图像的像素点可能出现无灰度值的情况。
因为,对图像进行缩放处理时输出图像像素和输入图像之间可能不再存在着一一对应关系。
下面分别对三种算法予以介绍。
2.1 最近邻插值算法最简单的插值法是最近邻插值法,也叫零阶插值法[2]。
即选择离它所映射到的位置最近的输入像素的灰度值为插值结果。
对二维图像,是取待测样点周围4 个相邻像素点中距离最近1 个相邻点的灰度值作为待测样点的像素值。
若几何变换后输出图像上坐标为(x′,y′)的对应位置为(m,n),则示意图如下所示:2.2 双线性插值算法双线性插值又叫一阶插值法[3],它要经过三次插值才能获得最终结果,是对最近邻插值法的一种改进,先对两水平方向进行一阶线性插值,然后再在垂直方向上进行一阶线性插值。
ERDAS 影像融合方法汇总(chimneyqin)

ERDAS 影像融合方法汇总影像融合是指将多源信道所采集到的关于同一目标的影像数据经过影像处理和计算机技术等,最大限度的提取各自信道中的有利信息,最后综合成高质量的影像,以提高影像信息的利用率、改善计算机解译精度和可靠性、提升原始影像的空间分辨率和光谱分辨率,利于监测。
ERDAS IMAGINE 提供多种影像融合方法,且支持带RPC模型的影像融合处理。
1、(14个波段(蓝/像也为Step4: 利用低通滤波器(5×5)对多光谱影像进行滤波处理,输出多光谱滤波影像。
Step5: 利用相减法对全色锐化影像、全色滤波影像进行相减处理,并将全色锐化影像按照权重融合到多光谱滤波影像各个波段,输出新多光谱影像。
(2)参数说明Input Sensor Type 待融合影像传感器类型,分为Quickbird、IKONOS、Format三种传感器。
输入影像要求:多光谱和全色分辨率比为4:1、同时获取、为同一个传感器,全色为单波段,多光谱为4波段。
Sharpening Filter Center Value3×3锐化卷积窗口中心值,其他值都为-1,默认值根据传感器变化,范围值为11、14、17、20、23、1000,小的中心值会产生更好的锐化效果。
一般来说,大分辨率影像锐化程度要求低,小分辨率影像锐化程度要求高,若全色影像已经经过锐化处理,此处选择1000。
Pan Contribution Weight融合时全色图像所占的比重(权重),范围为0.7-1.3,默认值根据传感器变化,小的锐化值会产生更好的锐化效果。
Create image of subset area根据子区的坐标来定义融合影像范围。
Create image of full area输出所有区域的融合影像,这个范围是全色和多光谱影像的交集(intersect)。
该项勾选时才可设置融合影像成果名称和存放路径。
Null Value 设置输出图像空值的数值。
线性内插法计算公式
线性内插法计算公式
线性内插是假设在二个已知数据中的变化为线性关系,因此可由已知二点的坐标(a, b)去计算通过这二点的斜线。
其中a 函数值。
举个例子,已知x=1时y=3,x=3时y=9,那么x=2时用线性插值得到y就是3和9的算术平均数6。
写成公式就是:Y=Y1+(Y2-Y1)×(X-X1)/(X2-X1)
通俗地讲,线性内插法就是利用相似三角形的原理,来计算内插点的数据。
线性内插法
内插法又称插值法。
根据未知函数f(x)在某区间内若干点的函数值,作出在该若干点的函数值与f (x)值相等的特定函数来近似原函数f(x),进而可用此特定函数算出该区间内其他各点的原函数f(x)的近似值,这种方法,称为内插法。
按特定函数的性质分,有线性内插、非线性内插等;按引数(自变量)个数分,有单内插、双内插和三内插等。
线性内插法的基本计算过程是根据一组已知的未知函数自变量的值和它相对应的函数值,利用等比关系去求一种求未知函数其他值的近似计算方法,是一种求位置函数逼近数值的求解方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
其中A 是任何形態的影像,k 是縮放係數,方法( 'method')則可為近鄰('nearest')或雙線性 ('bilineaer')。
5
6.2 影像內插法
6
6.3 一般性內插法
• Generalized interpolation function:
(6.2)
• R0(u) Nearest-neighbor interpolation
(interpolation) • 近鄰內插法(nearest-neighbor interpolation)
2
6.1 數據內插法
• 線性內插法(linear interpolation)
(6.1)
3
6.2 影像內插法
• 使用方程式(6.1),可得
(雙線性內插法)
4
6.2 影像內插法
• f (x', y') f (x 1, y 1) (1 ) f (x 1, y) (1 )f (x, y 1) (1 )(1 ) f (x, y)
24
第六章 影像幾何 第151頁
6.6 旋轉
25
6.7 歪像(Anamorphosis)
26
6.7 歪像(Anamorphosis)
27
6.7 歪像(Anamorphosis)
28
谢谢观看! 2020
29
第六章 影像幾何 6.1 數據內插法
• 假設有4 個數值要放大成8 個數值,該怎麼做?
• 解出線性係數a、b如下:
• 如此我們便可以得到以下 線性關係:
(連續性)
1
6.1 數據內插法
• 除了第一點與最後一點,x'i 完全不會與原始的 xj 相對應。
• 必須以已知的鄰近f(xj) 值來估算函數值 f(x'i)。 • 這種以周圍數值估算函數值的方法稱為內插法
• 我們必須保證旋轉之後,像素仍必須位在網格 上。
• 這裡可以如圖6.22 所示,用一個方形框住旋轉 後的影像,然後檢視虛線方框內的所有整數值 像素點(x', y' )。包含在旋轉影像中的點都是再 旋轉回去也會落在原始影像範圍內的數值。
21
6.6 旋轉
22
6.6 旋轉
23
6.6 旋轉
• (x', y' ) 的灰階值可透過周圍的灰階值,以內插 法找出來。這個數值就是旋轉後影像像素(x', y' ) 的灰階值。
15
6.4 使用空間濾波放大影像
16
6.5 縮小
• 將影像變小也稱為影像最小化(image minimization)。
• 次取樣(subsampling)
– 例如
17
6.5 縮小
18
6.6 旋轉
19
6.6 旋轉
20
6.6 旋轉
• 現在將影像視為點的集合來加以旋轉,如圖 6.21 所示。圖中的實心圓代表原始位置,空心 圓代表旋轉後位置。
7
6.3 一般性內插法
• R1(u) Linear interpolation
• 立方內插法(cubic interpolation)。
8
第六章 影像幾何 第141-142頁 圖6.12
6.3 一般性內插法
9
6.3 一般性內插法
10
6.3 一般性內插法
11
6.4 使用空間濾波放大影像
• 若只是想將影像放大為2 的次方倍大小,有一 個簡單取巧的方法,就是使用線性濾波器。
– 例如
– 零交錯(zero-interleaved)
12
圖 6.17
• 一個簡單的函數就可以完成這個動作,如圖 6.17。
13
6.4 使用空間濾波放大影像
– 現在就可以對矩陣執行空間濾波,置換這些數值 為零的行與列使用濾波器。
近鄰內插法 雙線性內插法
雙立方內插法
14
6.4 使用空間濾波放大影像