基于CCD图像识别的HCS12单片机智能车控制系统_刘建刚
基于HCS12X单片机的多传感器智能车控制系统设计

基于HCS12X单片机的多传感器智能车控制系统设计【摘要】本文基于飞思卡尔HCS12X控制单元,利用多传感器的信息融合技术设计了一款可以自主循迹行驶的智能车。
系统主要融合了GPS,视觉传感器,激光雷达传感器对智能车进行定位及轨迹控制。
该控制系统在安全性,可靠性,易操作性等方面都进行了综合的优化。
实验表明:该智能车可以按照设计路径自主行驶。
【关键词】智能车;HCS12X单片机;视觉传感器Multi-sensor Combination Intelligent Vehicle Control System's Design Based on HCS12XHANYi-lun WANGBin-long WENXue-lei(College of Mechanical and Electronic Engineering, Shandong University of Science and Technology, Qingdao Shandong, 266510)【Abstract】In this paper, the intelligent vehicle control system’s design based on HCS12X MCU. The Multi-sensor combination technology be used in this control system. This system can control vehicle’s position and Navigate the vehicle with GPS, vision sensor and laser radar sensor. This control system have an optimal decision in safety, reliability and handleability. The experiment showed that the smart vehicle can driving in the designed road by itself.【Key words】Intelligent vehicle; HCS12X MCU; Vision sensor0 引言随着近年来科学技术的高速发展,电子化、信息化、智能化成为了未来车辆的发展趋势。
基于CCD图像识别的HCS12单片机智能车控制系统
基于CCD图像识别的HCS12单片机智能车控制系统
刘建刚;程磊;黄剑;章政
【期刊名称】《光电技术应用》
【年(卷),期】2007(22)6
【摘要】介绍了一种基于飞思卡尔HCS12单片机控制的智能车系统.该系统以CCD摄像头传感器作为路径识别装置,通过图像识别提取路径信息,采用PD算法控制舵机转向,通过模糊设定速度和PID调整速度相结合的算法控制直流电机.较之常规的光电传感器识别路径方案,该摄像头传感器可以获取更多的路径信息,使智能车按任意给定的黑色引导线更能以较快的速度平稳地运行.
【总页数】5页(P52-55,59)
【作者】刘建刚;程磊;黄剑;章政
【作者单位】武汉科技大学信息科学与工程学院,湖北,武汉,430081;武汉科技大学信息科学与工程学院,湖北,武汉,430081;武汉科技大学信息科学与工程学院,湖北,武汉,430081;武汉科技大学信息科学与工程学院,湖北,武汉,430081
【正文语种】中文
【中图分类】TP212.9
【相关文献】
1.基于HCS12的自寻迹智能小车控制系统设计 [J], 黄从海;陈红岩
2.基于HCS12单片机的智能导航系统的设计 [J], 匡石;方千山
3.基于HCS12的小车智能控制系统设计 [J], 孙浩;程磊;黄卫华;程宇
4.基于HCS12单片机的智能寻迹模型车的设计与实现 [J], 韩毅;杨天
5.基于HCS12单片机的智能车设计 [J], 曹亚丽; 李佳音; 牛学芬
因版权原因,仅展示原文概要,查看原文内容请购买。
智能车教程HCS12 微控制器IO

$001C PERP - Port P Pull Device Enable Reg.
PERP x 0 = Pull-up/down disabled 1 = Pull-up/down enabled
$001D PPSP x PPSP - Port P Polarity Select Reg.
0 = Falling edge on pin x sets corresponding PIFP Flag. (Pull-up device connected) 1 = Rising edge on pin x sets corresponding PIFP flag. (Pull-down device connected)
Port Integration Module
Input / Output
Logic Thresholds: High: 0.65 X Vdd = 3,25V Low : 0.35 X Vdd = 1,75V Drive current: Output High: 全功率: 12.5mA at Vdd -.8V 降功率: 1.25mA at Vdd -.8V Output Low: 全功率: -12.5mA at .8V 降功率: -1.25mA at .8V
$0027
J 端口
PTJ - Port J I/O Reg. DDRJ - Port J Direction Reg.
Address Offset $0028 A read returns latched value when configured for output or value at the input pin when when configured as input. Note: If both CAN4 and IIC are enabled, CAN Functionality takes precedence $002A DDRJ x = 0 Pin is Input = 1 Pin is Output
基于CCD传感器智能寻迹模型车研究和实现
基于CCD传感器的智能寻迹模型车的研究与实现董长远长安大学汽车学院车辆工程系,陕西省西安市 710064摘要: 研究并实现了一种基于CCD传感器的智能寻迹模型车系统。
采用飞思卡尔公司HCS12 系列16位单片机MC9S12DG128作为核心控制单元,使用CCD 摄像头采集路面信息。
赛车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。
关键词:智能车;CCD传感器;路径识别;捷径Investigation & implementation of an intelligent-searching track car model based on CCD Image SensorDONG ChangYuanAutomobile School, CHANG-AN University, Xi’an City, Shanxi Province 710064,ChinaAbstract: An intelligent-searching track car model based on CCD image sensor is investigated and implemented. The intelligent car system, with Freescale HCS12 series 16 bit single-chip MC9S12DG128 as its control micro-processor, uses CCD camera to obtain lane image information.The main function that the intelligent car may achieve is that the car should track the black-guide-line automatically and move forward following the line as fast and stable as possible.Key words: intelligent car;CCD Image Sensor;lane detection;royal road1.引言车辆和我们的社会生活息息相关,然而当今车辆的智能化发展还不是很迅速,特别是在安全性,智能性,车与路之间交互信息等方面.当今的车辆技术与未来的智能车辆技术还存在着巨大的差距。
基于CCD透视投影的智能车控制算法的研究
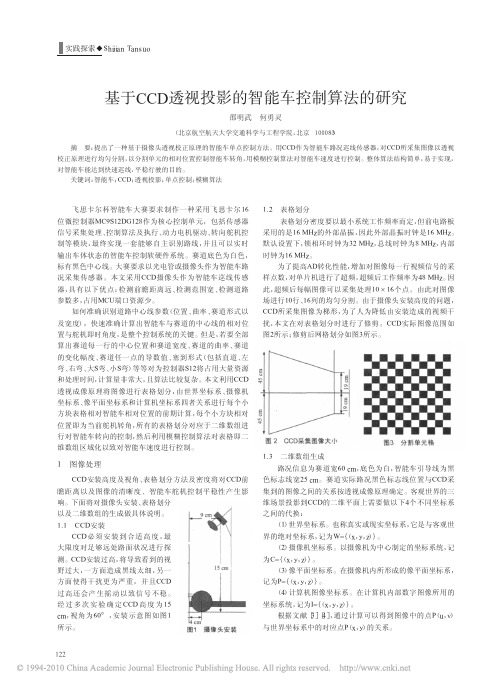
基于CCD透视投影的智能车控制算法的研究邵明武何勇灵(北京航空航天大学交通科学与工程学院,北京100083)摘要:提出了一种基于摄像头透视校正原理的智能车单点控制方法。
用CCD作为智能车路况巡线传感器,对CCD所采集图像以透视校正原理进行均匀分割,以分割单元的相对位置控制智能车转角,用模糊控制算法对智能车速度进行控制。
整体算法结构简单,易于实现,对智能车能达到快速巡线,平稳行驶的目的。
关键词:智能车;CCD;透视投影;单点控制;模糊算法飞思卡尔杯智能车大赛要求制作一种采用飞思卡尔16位微控制器MC9S12DG128作为核心控制单元,包括传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等模块,最终实现一套能够自主识别路线,并且可以实时输出车体状态的智能车控制软硬件系统。
赛道底色为白色,标有黑色中心线。
大赛要求以光电管或摄像头作为智能车路况采集传感器。
本文采用CCD摄像头作为智能车巡线传感器,具有以下优点:检测前瞻距离远、检测范围宽、检测道路参数多,占用MCU端口资源少。
如何准确识别道路中心线参数(位置、曲率、赛道形式以及宽度),快速准确计算出智能车与赛道的中心线的相对位置与舵机即时角度,是整个控制系统的关键。
但是,若要全部算出赛道每一行的中心位置和赛道宽度、赛道的曲率、赛道的变化幅度、赛道任一点的导数值、塞到形式(包括直道、左弯、右弯、大S弯、小S弯)等等对为控制器S12将占用大量资源和处理时间,计算量非常大,且算法比较复杂。
本文利用CCD 透视成像原理将图像进行表格划分,由世界坐标系、摄像机坐标系、像平面坐标系和计算机坐标系四者关系进行每个小方块表格相对智能车相对位置的前期计算,每个小方块相对位置即为当前舵机转角,所有的表格划分对应于二维数组进行对智能车转向的控制,然后利用模糊控制算法对表格即二维数组区域化以致对智能车速度进行控制。
1图像处理CCD安装高度及视角、表格划分方法及密度将对CCD前瞻距离以及图像的清晰度、智能车舵机控制平稳性产生影响。
基于智能车中摄像头的图像采集的研究_刘明
图 3 处理后的图像信息 Fig. 3 Picture message after processing
或偶场。
2 软件实现部分
2.1 摄像头初始化
摄像头视频信号行场同步接入 S12 单 片 机的 T 口 中 断 ,
引脚分配如下:
PT0:行 同 步 信 号
PT1;场 同 步 信 号
其初始化中断代码如下:
第 5 步,下一场中断到,开始下一场的图像信息。 图像采集的流程如图 4 所示。
3 结束语
通过对图像采集的研究, 能够较易 通 过 LM1881 对 视 频 信号进行分离,除了得到图像信号,还包括行同步信号,行消 隐 信 号 ,场 同 步 信 号 ,场 消 隐 信 号 等 ,通 入 芯 片 的 PT 口 进 行 中断和 AD 口转换,从而完成对信号进行分割和量化,得到我 们想要的灰度值。 接下来只要对其进行二值化处理,就完成 了模数转化,得到了想要的图像。 参考文献: [1] 申 立 琴 ,马 彩 文 ,田 新 锋 ,等. 基 于 网 络 技 术 的CCD图 像 采
去噪声处理,然后对信号进行滤波,提取黑线的中心位置,获取路径参数信息。 一帧图像处理结束,根据图像的前视距
离最近的黑线中心位置的偏移量和黑线斜率判断当前赛道信息,并结合预测算法,控制舵机的转向。 使得小车能够保
证稳定性的前提下,高速行驶。
关键词: 智能车; 摄像头; 图像采集
中图分类号: TP249
摘要: 摄像头作为视觉信息采集工具被广泛运用到各种智能系统中。 文中以全国大学生"飞思卡尔"杯智能车竞赛为
背景。 首先,通过选择 CCD 传感器进行路径识别,提取 CCD 的视频同步信号,控制单片机的 A/D 进行采集。 由于复合
智能车s12单片机闭环系统的信息提取识别与控制
人工智能及识别技术本栏目责任编辑:唐一东第5卷第30期(2009年10月)智能车s12单片机闭环系统的信息提取识别与控制奚鑫泽(武汉大学自动化系,湖北武汉430072)摘要:该文根据智能汽车大赛的经验提出了智能车系统的二值法数据采集、提取识别及几种控制方法,对智能汽车、单片机开发及控制具有一定意义。
关键词:智能汽车;微分边缘硬件二值;改进;控制中图分类号:TP391文献标识码:A 文章编号:1009-3044(2009)30-8509-02“飞思卡尔”杯全国大学生智能汽车大赛,采用的智能车是以freescale HCs12系列单片机为核心、以黑线为引导、白色板为路面的自主寻迹的自动控制竞速小车。
单片机通过对光电管、激光管或摄像头等传感器采集来的道路信息,进行提取处理,并经过运算判断后发出控制信号,以控制舵机和电机输出,达到方向和速度控制的目的。
由于不确定因素的存在,小车又是随动控制,很多环节是非线性的,参数时变数学模型难以建立,故通过添加速度、位置等检测模块,构成一闭环系统,可达到比较理想的控制效果。
由于传感器种类繁多,本文仅探讨了几种CCD 摄像头传感器的信息提取及控制方法。
针对以门限电平为转化条件的二值化算法的一些缺陷,本文给出了微分边沿法的借鉴与新的尝试。
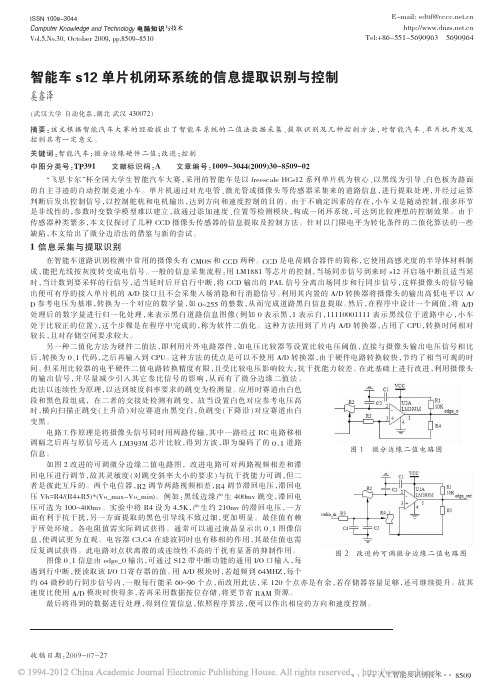
1信息采集与提取识别在智能车道路识别检测中常用的摄像头有CMOS 和CCD 两种。
CCD 是电荷耦合器件的简称,它使用高感光度的半导体材料制成,能把光线按灰度转变成电信号。
一般的信息采集流程:用LM1881等芯片的控制,当场同步信号到来时s12开启场中断且适当延时,当计数到要采样的行信号,适当延时后开启行中断,将CCD 输出的PAL 信号分离出场同步和行同步信号,这样摄像头的信号输出便可有序的接入单片机的A/D 接口且不会采集入场消隐和行消隐信号。
利用其内置的A/D 转换器将摄像头的输出高低电平以A/D 参考电压为基准,转换为一个对应的数字量,如0~255的整数,从而完成道路黑白信息提取。
基于HCS12X单片机的多传感器智能车控制系统设计
科教 前 哨
科 技 视 界
21年 0 月第 0 期 02 1 3
基于 HC 1X单片机的多传感器 S2 智能车控制系统设计
韩 以伦 王斌龙 温学雷 山东 青岛 26 1 ) 6 5 0 ( 山东科技大学机械 电子工程学院
【 要】 摘 本文基于飞思卡 尔H S 2 C 1X控制单元 , 利用多传感器的信 息融合技术设计了一款可以 自主循
迹行 驶 的智 能车 。 系统 主要 融合 了 G S 视 觉传 感 器 , P, 激光 雷达 传感 器对 智 能车进 行定位 及轨 迹控 制 。 该控 制
系统在安全性 , 可靠性 , 易操作性等方面都进行 了综合的优化。 实验表明: 该智能车可以按照设计路径 自 主行
驶。
【 关键词】 智能车 ; C 1X单片机 ; H S2 视觉传感器
M u t s n o m b n t n I tl g n hceCo t o y tm ' De n Ba e n HCS1 X l - e s r Co i a i n el e tVe il n r l se s i o i S ig sd o 2 HAN - u W ANG n ln W EN e li Yi l n Bi- o g Xu - e
sft,rl bl y a d h n la i t. h x ei n h we h tt e s r v h ce c n diig i h e in d aey ei i t n a de bl y T e e p rme ts o d ta h ma t e il a rvn n te d sg e a i i
s n o o iain tc n lg eu e n ti c nrlsse T i ytm a o to e il o io n v e s rc mb n t e h o o yb sd i hs o t y tm. hss s o o e c n c nrlv hceSp st n a d Na — i
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光电 技术 应用
ELECT R O- OPT IC T ECHN OL OGY A PPL ICA T ION
Vol. 22, No. 6 December . 2007
文章编号: 1673- 1255( 2007) 06- 0052- 04
基于 CCD 图像识别的 H CS12 单片机智能车控制系统
的光电传感器识别路径方案, 该摄像头传感器 可以获取更多的路径信息, 使智能 车按任意 给定的黑色 引导线更 能以较快的 速
度平稳地运行.
关键词: 图像识别; 智能车; HCS12 单片机; CCD
中图分类号: TP212. 9
文献标识码: A
Design of Smartcar. s HCS12 MCU Control System Based on CCD Image Recognition
1 检测前瞻距离远 2 检测范围宽
3 检测道路参数多 4 占用 M CU 端口 资源少
1 电路相对设计复杂 2 检测信息更新速度慢 3 软件处理数据较多
2 主要电路模块设计
2. 1 CCD 路径识别电路
摄像 头的 主要 工作 原理 是[ 2] : 按一 定 的分 辨 率, 以隔行扫描的方式采样图像上的点, 当扫描到某 点时, 就通过图像传感芯片将该点处图像的灰度转 换成与灰度成一一对应关系的电压值, 然后将此电 压值通过视频信号端输出. 具体参见图 1. 当摄像头 扫描完一行, 视频信号端就输出有一个电压/ 凹槽0, 并保持一段时间, 此/ 凹槽0叫做行同步脉冲, 它是扫 描换行的标志. 然后, 跳过一行后, 开始扫描新的一 行, 如此下去, 直到扫描完该场的视频信号, 接着就 会出现一段场消隐区. 在这若干个消隐脉冲中, 有个 脉冲远宽于其他的消隐脉冲, 该消隐脉冲即称为场 同步脉冲, 它是扫描换 场的标志. 摄像头每秒 扫描 25 幅图像, 每幅又分奇、偶 2 场, 先奇场后偶场, 故 每秒扫描 50 场图像. 即扫描周期为 20 ms.
第 6期
刘建刚等: 基于 CCD 图像识别的 HCS12 单片机智能车控制系统
53
路径识别方法 红外光电管 传感器方案
摄像头传感器方案
表 1 2 种检测方案优劣之比较
优点
缺点
1 电路设计相对简单 2 检测信息速度快 3 成本低
1 道路参数检测精度低、种类少 2 检测前瞻距离短 3 耗电量大
4 占用 M CU 端口资件流程图
图 6 R = 70 cm 弯道 CCD 采集图像
图 7 智能车测试赛道
图 5 图像采集程序流程图
4 调试及实验
由于小车调试需要实时数据才能更好地对系统 进行分析, 故本系统采用无线串口通讯模块实现小
5结 语
本文基于图像识别设计了自主寻迹自动调节速 度的智能车控制系统. 在硬件上采用 CCD 摄像头采 集道路图像, LM 1881 芯片分离视频信号, H CS12 作 为控制核心; 在软件上采用隔行采集边缘提取的图 像处理算法提炼路径信息, PD 算法控制舵机转向,
Abstract: A smart car system is introduced based on H CS12 M CU of FreeScale cont rolling. T his system uses CCD sensor as its rout e recognit ion device, draws it s rout e information throug h image recognit ion, changes t he direct ion of st eering eng ine w ith P D control algorithm, cont rols the DC M ot or by sett ing speed w it h fuzzy sett ing speed and modulat ing speed w it h PID control algorit hm . Compared w it h t he normal route recognit ion scheme of photoelectric cell sensor, this scheme can obtain more pat h inf orm at ion, w hich makes t he smart car can run smoothly along t he black- guide- line given arbit rarily w ith t he most rapid speed. Key words: Image recog nition; Smartcar; HCS12 M CU; CCD.
第 6期
刘建刚等: 基于 CCD 图像识别的 HCS12 单片机智能车控制系统
55
车与计算机的通信. 此外, 为了方便对路径识别单元 进行调试, 笔者自编了一套基于 VC 开发的串口调 试软件以实时显示图像采集数据, 图 6 即是利用该 软件显示的 CCD 采集图像, 实际情况是一个半径为 70 cm 的弯道, 图 6 中黑色代表实际采集到的路径 引导线, 灰色代表白色 KT 板跑道, 右边数据是每行 图像提取出来 的路径引导线相对车身 中心轴的距 离, 由图 6 可知: 该图像采集基本可以提取出路径信 息. 小车的性能测试是在由一个直道、不同曲率弯道 以及 S 弯道组成的赛道( 如图 7) 上测试的, 实验证 明: 小车能够在此赛道上沿着黑色引导线稳定运行, 且平均速度可以达到 2. 5 m/ s.
图 2 摄像头采样电路图
54
光电技术应用
第 22 卷
其中, 摄像头视频信号端接 L M1881 的视频信 号输入 端, 同 时也 接入 S 12 的 一个 AD 转换器 口 ( 选用 PAD1) . LM 1881 的行同步信号端( 引脚 1) 接 入 S 12 的一个外部中断 IRQ 口. 之所以选用外部中 断 IRQ 口是因为, 行同步信号持续时间较短, 为了 不漏检到行同步信号, 若使 用普通 I/ O 口, 则 只能 使用等待查询的方式来检测到行同步信号, 这会浪 费不少 S 12 的 CPU 资源. L M1881 的奇- 偶场同步 信号 输 出 端 接 S 12 的 普 通 I/ O 口 即 可 ( 选 用 PORT M 0) . 在此, 本系统选择奇- 偶场同步信号来 作为换场的标志信号, 而不是选用 LM 1881 引脚 3 输出的场同步信号. 这样做的好处是, 当摄像头信号 处于奇场或偶场时, 则奇- 偶场信号整场都相应地 处于高电平或低电平, 只要 用个普通 I/ O 口, 若检 测到该信号发生变化, 就可以知道摄像头信号换场 了. 因为每场信号持续的时间相对较长, 所以也不用 担心漏检到换场的发生. 若使用场同步信号, 则需要 用中断的方式来判断换场的发生, 相对要麻烦一些.
图 3 电机驱动硬 件电路图
3 软件设计
CCD 智能车系统的软件开发 设计[ 3- 4] 是 基于 M et rowerks CodeWarrior CW12 V4. 5 编程环境, 使 用汇编与 C 语言相结合实现的. 整个系统软件流程 图如图 4 所示. 其软件设计关键在于图像处理算法 是否做的有效可靠, 黑线提取得是否准确合理. 这是
智能车系统设计是一种以智能汽车为研究背景 的科技创意性制作. 主要由控制核心单元、电源管理 单元、路径识别单元、车速检测单元、转向伺服电机 控制单元及直流驱动电机控制单元组成. 一般要求 小车能够在白色的场地上, 通过自身自动调整转向 角和车速, 使其能自动地沿着一条任意给定的黑色 带状引导线行驶.
HCS12 的运算速度和自身 A/ D 端口的采样速度, 通 过适当的倍频, 采用一定的算法能够适应对黑白低 线数的摄像头的有效视频采样和对大量图像数据的 处理, 结合上述所叙, 选择 CCD 图像传感器作为最 终方案.
收稿日期: 2007- 11- 23 基金项目: 国家自然科学基金( 60705035) , 湖北省国际科技合作重点项目( 2006CA025) 作者简介: 刘建刚( 1986- ) , 男, 湖北武汉人, 学士, 主要研究方向为自动控制.
图 1 摄像头视频信号
要能进行图像采集识别路径, 首先要处理好的 技术问题就是能有效地从摄像头信号中提取出行同 步脉冲、消隐脉冲及其场同步脉冲. 有 2 种可供参考 的方法: 第一, 直接用 A/ D 进行软件提取. 结合 CCD 摄像头信号的特点, 通过判断采样得到的电压值处 在不同的范围来提取; 第二, 给单片机配以合适的外 围芯片进行硬件提取. 考虑到硬件提取简单易行, 可 靠性高. 故本系统选用 L M1881 视频同步信号分离 芯片来进行提取. 其硬件电路图设计如图 21
一个同时涉及到软件和硬件的操作过程, 又恰恰是 该软 件 设 计 的 难 点. 由 于 图 像 数 据 量 大, 仅 凭 HCS12 是不可能将整幅图像信息都提取出来, 故本 系统在保证不漏检黑色引导线的前提下采用隔行采 集简化算法, 即每隔 5 个有效行采集 1 行来压缩图 像的数据. 图像采集程序流程图如图 5 所示.
( 下转第 59 页)
第6期
张健等: OL ED 显示设计与实现
59
据顺利读出. 所以在设计此类程序时可以通过在相 应地方增加延时, 调整时序, 以满足芯片正常工作要 求.
满屏显示函数
void fulldisplay ( void) {
uchar m, n, page; for ( m= 0; m< 64; m+ + ) {
1 方案选定
在智能车系统中, 路径识别单元是体现智能车
智能水平的一个重要标志, 是直接影响智能车的控 制性能的一个重要因素. 常用的路径识别单元设计 方案除了文献[ 1] 中所叙的红外光电管传感器以外, 还可采用 CCD 图像传感器. 两方案优缺点比较如表