基于超声波倒车雷达 外文翻译
超声波检测的倒车雷达开题报告

《基于超声波检测的倒车雷达设计》开题报告一、课题的目的和意义1.研究目的(1)研究了一种汽车倒车雷达预警系统。
该系统在常见的汽车倒车预警装置的基础上采用计算机控制技术和超声波测距技术,通过显示障碍物与汽车的距离并根据其距离远近实时发出报警,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,提高了驾驶安全性。
(2)在研究汽车倒车雷达预警系统过程中,运用理论分析、电路设计和计算机仿真等研究手段,完成了倒车雷达预警系统硬件和软件的设计,采用了模糊控制算法,进行了系统的计算机仿真。
2.研究意义随着中国经济的持续增长和汽车价格的持续下降,越来越多的家庭拥有自己的汽车。
在享受汽车给我们带来的便利同时,由于倒车而产生的问题也日益突出。
一方面汽车的数量逐年增加,公路、街道、停车场和车库拥挤不堪,可转动的空间越来越少;另一方面,新司机及非专职司机越来越多,因倒车引起的纠纷越来越多,车辆之间、车辆与人、车辆与墙壁等障碍物之间的碰撞时有发生。
在2006年汽车事故的发生比例中,倒车引起的事故占28%,倒车己成为令人们头痛的一项任务,即使是经验丰富的司机也在抱怨倒车是件费力费神的事。
据统计危险境况时,如果能给驾驶员半秒钟的预处理时间,则可分别减少追尾事故的30%,路面相关事故的50%,迎面撞车事故的60%。
改善倒车遇到的窘境被越来越多的人所关注,人们对汽车操纵的便捷性提出了更高的要求,希望有种装置能够解决汽车倒车给人们带来的不便,消除驾驶中的不安全因素,可将车快速准确地停放到指定的位置。
二、文献综述国外汽车倒车雷达预警系统早期大多采用红外线的发射与接收原理,不属于雷达(无线电波)的产品,最大的缺点是红外线波易受干扰,整个系统的警示音常呈现不稳定的乱鸣状态,另外对深黑色粗糙表面物体的反应也较差。
但更糟糕的是,无论是红外线发射器或接收器,只要任何一方让一层薄薄的冰雪或泥尘覆盖,系统就会失效。
最近在欧美出现的一种电磁感应倒车雷达。
基于单片机的超声波倒车雷达文献综述
综合文献调研及综述课题:基于单片机的超声波倒车雷达综述学院专业年级班别学号学生姓名指导教师2015年1 月13日一、文献调研部分1。
中文切题期刊论文8篇[1]刘海峰。
汽车倒车雷达系统全接触[J].汽车电器,2007,12:5—8.摘要:简要介绍倒车雷达的组成和工作原理,回顾倒车雷达的发展历程,就时下主流新车的倒车雷达安装状况以及非原车倒车雷达的性能检测结果进行报道,对倒车雷达的选购安装和使用过程中的注意事项进行总结,最后展望倒车雷达系统的未来发展。
[2]陈烁华,冯桑。
倒车辅助系统的技术发展[J]。
城市车辆,2009,10:36—38。
摘要:倒车辅助系统,又称泊车辅助系统或可视倒车雷达,能够给驾驶员倒车、泊车操作带来极大的方便,现已越来越多配置于汽车当中.本文详细地介绍倒车辅助系统的产生背景、发展历程以及现有主流产品的种种特点;并对其缺陷做出了初步探讨,提出了新的解决思路。
[3]段现星。
超声波传感器在倒车雷达上的发展[J].家电检修技术,2009,12:1.摘要:<正〉倒车雷达是汽车泊车或者倒车时的安全辅助装置,能以声音或者更为直观的视频显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高驾驶的安全性。
[4]刘鑫,朱靖玉。
基于单片机的倒车雷达的设计[J]。
电子设计工程,2012,01:94—97.摘要:为降低汽车倒车时的碰撞事故,提出了一种基于单片机的超声波测距倒车雷达的设计方案.该设计根据超声波测距原理,采用AT89S52单片机为控制核心,设计了超声波测距倒车雷达,并对测量距离误差进行了分析。
测量距离为0。
1~5.0 m,其精度经过校正后可达1 cm。
该设计结构简单、工作可靠,有良好的测量精度和灵敏度。
[5]吴琼,封维忠,马文杰.汽车倒车雷达系统的设计与实现[J].现代电子技术,2009,09:191—194。
基于超声波时差测距法的倒车雷达设计

寓 。;
25
软件设计
倒车雷达的功能较为单一.任 务不多,所以使用前后台上作方式, 主程序流挫如图7所示。
系统初始化过程中要仔细设置 P JCl8F2480 J/o几的输人输出控制 位,以及A L_】的模数复用脚控制位, 否烈不能精确工作。存功能实现方 面,要注意的主要问题有:
弓l言
倒车雷达是用来探测车身周嘲 的障碍物井显示其距离,以帮助驾 驶员安全倒车或泊车的辅助电了设 施【1】,在中高档汽车上的应用已逐 渐普及,但多为无源探头倒车雷达。 目前高性能的倒车雷达大都采用有 源探头,接收的回波信号在探头内 部放火整理后输出,发射信号也在 探头内部耦合驱动传感器,其抗干 扰性更强,探头的互换性、一致性也 更高。本文给出一种有源倒车雷达 设计方案,使用超声波传感器,利用 时差法来确定传感器和反射物之问 的距离,在驾驶员选择倒车挡时,向 驾驶员提供监视范围内是否存在障 碍物的指示。
图g是利用一个探头工作在自 发自收时的测距情形,障碍物为距 离150cm左右的A4纸张。不波器 通道1用于测量运放输出的波形,
电压比例常数为2V;通道2测量单 片机的INT引脚,电压比例常数为 5v:时基为2mS。
,{、芷
由网9可以看出,传感器发射 时的余震信号超过了2mS,这样在 自收发测距的情况F,最小的测距 范围限制在了40cm左右(小于40cm 的距离测量可以通过发射和接收使 用不同探头的方法来进行,通过三 角换算得出距离,以减小余震的影 响,只是精度会差些)。这是由 于中周性能不良造成的,有荷于进 一步完善。另外,一些超卢波探测 的传统处理难点仍不尽如人意,如 扫地渡的滤除仍然要部分地借助外 壳或安装;斜坡或石子路面的回波
超声波倒车雷达工作原理、技术现状、发展趋势

超声波倒车雷达工作原理、技术现状、发展趋势超声波倒车雷达工作原理、技术现状及发展趋势Ken.H一、概述倒车雷达系统,英文全称为REVERSING / PARKING AID SUBSYSTEM ,BACK SENSOR或PACKING SENSOR,英文简称RPA。
目前被各种轿车特别是高级轿车作为汽车电装品的标准配置或售后的汽车电装品主是选配品,例如:德国的奔驰(BENZ), 宝马(BMW),美国的别克(BUICK)、通用(GM)、以及日本的日产(NISSAN)、丰田(TOYOTA)、本田(HONDA)等均装有倒车雷达系统。
倒车雷达系统测距主要可分为超声波测距、微波雷达测距和激光测距三种。
其中超声波测距(超声波倒车雷达)无论是技术难度还是产品成本都具有其他两种产品不可比拟的优势,受到了广泛的应用和推广。
二、倒车雷达系统的基本原理倒车雷达系统的基本原理,是利用传感器内的超声波传感器(俗称探头)发射出40KHz的超声波,由接收探头接收经障碍物反射回来的超声波,根据超声波反射接收的时间差,由控制单元内的CPU处理换算成距离,并根据系统设定的距离分段发出不同的提示声及显示(LED、LCD、VDF、TFT等显示器,数码或颜色)提示得知车体到障碍物距离,使驾驶者轻易避免不必要碰撞。
2-1. 人耳听不到之音波频率之超音波一般定义为15KHz以上。
2-2. 音速为331.4M/秒,此为计算距离、时差的基本公式虽然温湿度变化时音速会有微小变化,但对短距离使用只有误差几mm。
2-3. 传感器检测方式为利用超声波(40KHz±2KHz)对对象发射后,有一反射波经物理原理(入射角=反射角)返回传感器探头,而控制单元利用发射3-1、在超声波传感器的种类可分为较传统的等方性传感器以及工艺水平更高的异方性传感器。
3-1-1、等方性传感器——→水平角度与垂直角度相同,例:120°:120°;3-1-2、异方性传感器——→水平角度与垂直角度不同,例:120°:60°或120°:45°3-2、传感器的侦测角度范围:3-2-1、在软件设计上:采用复杂的软件滤波方法,去除干扰信号,大幅度降低误判,与同类产品相比具有明显优势!3-2-2、在硬件设计上:将发射和接收电路设计在探头内部,使抗干扰性能有了根本突破!3-3、传感器的构造3-3-1、传感器的内部结构:一般而言,国内目前的倒车雷达传感器大多数使用的等方性传感器,其缺点在于垂直照射角度过大,容易探测到地,无法侦测较远的距离。
基于单片机的超声波测距倒车雷达设计

ANYANG INSTITUTE OF TECHNOLOGY本科毕业论文基于单片机的超声波测距倒车雷达设计The design of Ultrasonic ranging reverse radar based onSinglechip系(院)名称:专业班级:学生姓名:学生学号:指导教师姓名:指导教师职称:2011 年5 月毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得安阳工学院及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解安阳工学院关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:目录摘要 (Ⅰ)Abstract (Ⅱ)引言 (1)第一章方案论证及选择 (2)1.1 微处理器选择 (2)1.2测距传感器选择 (2)1.3语音报警器的选择 (3)1.4显示子系统的设计 (3)第二章超声波测距雷达工作原理 (4)2.1超声波传感器介绍 (4)2.1.1超声波传感器的特性 (6)2.2 超声波测距的原理及实现 (7)第三章硬件设计 (8)3.1系统总体结构框图 (8)3.2 AT89C51单片机 (8)3.3 电源电路 (11)3.4 时钟电路 (12)3.5 复位电路 (12)3.6 超声波测距模块HC-SR04 (13)3.7 74HC573芯片 (15)3.8 数码管显示及报警电路设计 (16)第四章系统软件设计 (19)4.1系统主程序的设计 (19)4.2中断处理程序的设计 (21)4.3测距模块的设计 (22)4.4显示及报警模块的设计 (22)结论 (24)致谢 ............................................................................................ 错误!未定义书签。
基于单片机的超声波测距倒车雷达设计开题报告

随着社会的不断发展,尤其是近几年来,汽车已逐渐成为人们不可或缺的交通工具。然而,由于汽车的普及,因汽车所萌生的一系列问题正渐渐凸显出来。
倒车,是每位驾驶员都必须掌握的技能,如同前行一样需要小心谨慎,每年都有倒车引起事故的报道,轻则对自己的车和他人的财物造成损伤,重则可能危及人的性命,尤其是对儿童危害较大,他们体型较小,仅从后视镜来获取视野指导倒车仍有可能会对让们造成伤害。现如今后视镜已越来越不能满足人们安全倒车的需求了。
指导文件5:
毕业设计(论文)开题报告
题目(中文)基于单片机的超声波测距倒车雷达设计
(英文)Based on Singlechip ultrasonic ranging reverse
radar design
课题类型课题来源
基于超声波测距的倒车报警系统设计
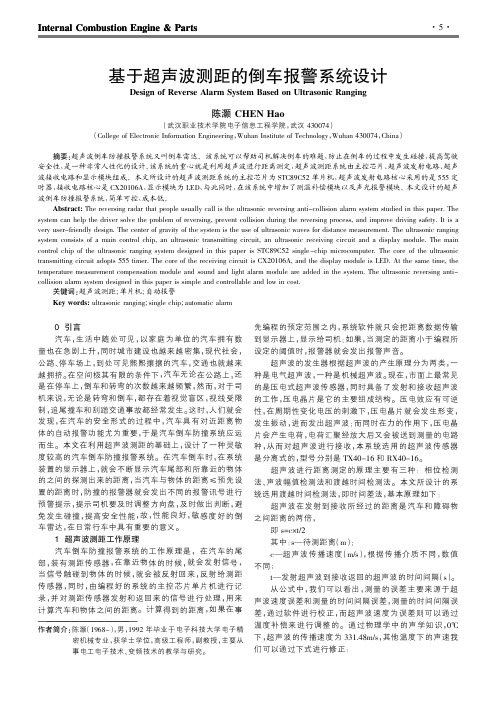
图2超声波发射电路
波频率38kHz与测距的超声波频率40kHz较为接近,所
以可以利用它制作超声波检测接收电路。
CX20106接收超
声波具有很高的灵敏度和较强的抗干扰能力。
为了改变接
收电路的灵敏度和抗干扰能力,可以调整电容C,当无信
号时,输出高电平,当接收到回波信号后跳变为低电平。
图3超声波接受电路
2.3数码显示模块
超声波是机械波的一种是通过机械产生的声波,当他在空气中传播的时候,会受到空气温度和环境的影响,当
我们需要其进行精确测量的时候,就需要在系统中安装温
度模块来对当时的声波速度进行校正,来达到精确的目图1超声波测距报警系统原理图
图5超声波测距报警系统程序流程图
图4超声波报警电路
系统软件件设计
软件控制系统是系统的重要组成部分,本次雷达系
统选择运用C语言程序进行系统编写。
在本次设计的雷。
超声波倒车雷达系统设计
郑州轻院轻工职业学院专科毕业设计(论文)题目超声波倒车雷达系统硬件设计学生姓名专业班级学号院(系)机电工程系指导教师(职称)完成时间2017年 05月01 日超声波倒车雷达系统的设计摘要基于超声波测距的汽车倒车雷达系统是在充分理解了超声波测距原理的基础上提出的。
工作时,超声波传感器发出脉冲信号,经障碍物反射后由超声波接收装置接收并送至单片机处理,可实现倒车时障碍物距离的实时监测并通过语音报警提示驾驶员。
本设计是以AT89C51单片机为主控制器的超声波倒车雷达系统,包括超声波发射和接收部分、单片机处理部分、LCD显示部分和语音报警部分等硬件系统以及软件程序设计。
关键词倒车雷达/单片机控制/超声波测距Design of Ultrasonic Reversing Radar SystemAbstractBased on the ultrasonic distance measurement principle,this text put forward a design scheme of car reversing radar system based on ultrasonic distance measurement. Ultrasonic sensor sends a pulse signal when it is working,and the ultrasonic receiving decive send the reflected signal by the obstacle to the MCU,this system could achieve Real-time monitoring of the Obstacle distance when reversing and prompt the driver by voice alarm.The overall design of ultrasonic reversing radar system based on the AT89C51 single chip as main controller was detailed introduced,include Ultrasonic transmitting and receiving part,MCU processing part,display by LCD, V oice Alarm part and its programming in the software.Keywords Reversing radar,single chip microprocessor,ultrasonic distance measurement目录中文摘要英文摘要1 引言 (1)1.1 设计主要内容 (1)2 系统的总体设计方案及理论基础 (1)2.1 总体设计方案 (1)2.2 超声波测距理论分析 (2)2.2.1 超声波测距原理 (2)2.3 超声波传感器 (3)2.3.1 超声波传感器的原理及结构 (3)2.3.2 超声波传感器的应用 (4)2.2.3 超声波传感器的主要性能指标 (4)3 系统的硬件设计 (5)3.1 单片机主控系统电路设计 (5)3.1.1 单片机选择 (5)3.1.2 电源电路 (6)3.1.3 复位电路 (6)3.1.4 时钟电路 (7)3.2 超声波发射电路 (7)3.3 超声波检测接收电路 (9)3.3.1集成电路CX20106A (9)3.3.2 超声波接收电路 (10)3.4 数码管显示模块 (10)4 系统的软件设计 (11)4.1 软件设计的要求 (11)4.2 主程序设计 (12)4.3 超声波测距模块设计 (12)4.3.2 超声波发送和接收程序 (13)5主程序 (14)5.1 显示程序 (14)5.2 超声波测距程序 (14)实训主要元器件介绍 (17)6 系统的仿真调试 (25)6.1 系统仿真调试内容 (25)6.2 实验的误差分析 (26)结束语 (27)致谢 (28)参考文献 (29)附录 (30)原件清单 (31)1 引言倒车,是每位驾驶员都必须掌握的技能,如同前行一样需要小心谨慎,每年都有倒车引起事故的报道,轻则对自己的车和他人的财物造成损伤,重则可能危及人的性命,尤其是对儿童危害较大,他们体型较小,仅从后视镜来获取视野指导倒车仍有可能会对让们造成伤害。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
外文翻译毕业设计题目:超声波倒车雷达预警原文1:DISTANCE MEASURING AND MONITORING DEVICE EQUIPPED AUTOMOBILE REVERSE RADAR译文1:距离测量和监控设备装备汽车反向雷达原文2:ULTRASONIC SENSOR ASSEMBLY FOR AVEHICLE REVERSING RADAR译文2DISTANCE MEASURING AND MONITORING DEVICE EQUIPPED AUTOMOBILE REVERSE RADAR(原文1)This design relates to an automobile commutating radar, an ultrasonic sensor comprising the radar. The ordinary car commutation radar is usually installed in the rear bumper of a car. The vehicle has a commutation radar sensor, a ceramic chip in the polarization electric field, due to the reverse piezoelectric vibration of the aluminum housing and transmitting an ultrasonic signal, and receiving the reflected ultrasonic signal into an effective distance. Therefore, a driver will know that this situation is reversed in the rear of the vehicle do not have to stop looking for the front of the vehicle.A good ultrasonic sensor ultrasonic signal should be sent to a central area, produced a strong reaction in order to achieve a sensitive detection. The distance along the line of its axis with reference to Figure 5, a conventional ultrasonic sensor sensitive areas, the reception sensitivity in a test has 250 cm, and a sensitive, including 60 degree angle in the above 2 (X) cm. Thus, the conventional sensor performance has a low accuracyIn some vehicles, the most traditional ultrasonic sensor mounted in the front and rear bumpers. Vehicles of a monitor in a dashboard display, ultrasonic sensor detects an obstacle. However, with the conventional ultrasonic sensor has a sensitive wide angle, they must be installed in the end of the bumper to prevent the ultrasonic signals interfere with each other. However, the distance in each ultrasonic sensor is so large is still very low detection accuracy.In addition, when parking the vehicle, ultrasonic sensors often detect other vehicles parked next to the vehicle as an obstacle, so the driver may be a false alarm.Accordingly, the present design provides an improved ultrasonic sensors to reduce or eliminate the above problems.Summary of the designThe main purpose is to provide the design of an ultrasonic sensor sensitive to the radar has high precision long distance and a little sensitive to the angle of the car for. Other objectives, advantages and novel features of the design will become more apparent from the following detailed description together when an ultrasonic transducer assembly of the vehicle the commutation radar has an ultrasonic sensor and the two wires. A sleeve is received by the rubbermaterial and has a chamber sensor. A tapered opening that is defined in a front chamber. A wave guide cone is provided to open and close to the sensor in the center of the tapered. By using the sensor assembly, automotive radar there is a reversal of precision long detection distance in a concentrated area.The reference to the diagram, an ultrasonic sensor assembly for a car reversing radar, in accordance with the design consists of a sensor, a set, a guided wave cone, and a housing (ultrasonic sensor has a structure like traditional sensors, and two wires extending from sensors.Sleeve, usually made of rubber, there is one which is defined as the receiving sensor. A tapered shape of the opening is defined at the front and an opening formed on the lower side to prevent the ultrasonic signal reflected from the ground to cause false alarms. A flange formed on the rear of the sleeve.The definition channel for receiving signals. A rear cover is provided on the rear side of the space to encapsulate the sensor and the sleeve inside.In the assembled state shown in Figure 2, the guide wave cone installed you like bracket combination conical opening of the center of the casing and highlights. The heating wire extends the bracket backward and exit back cover. The sleeve is placed in the housing flange butt shoulder wires and heating wire extends from the back cover of the diaphragm. A pad, made of a resin or other soft material, is provided between the sleeve is An ci back cover, so the sleeve and the sensor housing can be stably received.Figure 4 illustrates a detector effect Contrast sensor and unguided wave cone, wherein the solid line illustrates the sensor wave guide cone, and the conflict lines described sensor without the guided wave taper. As shown in Figure 4, at a test frequency of about 40 kHz (35 kHz), gift of design of the sensor can be provided to an ultrasonic signal with a Federation higher than traditional sensors. Therefore, the design of detection better than traditional sensors作者:Joan Smith;Mike Howard ;国籍:USA出处:United States Patent距离测量和监控设备装备汽车反向雷达(译文1)本设计涉及一种汽车换向雷达,用一个超声波传感器组成该雷达。