SPECTRUM HANDOFF IN COGNITIVE RADIO WITH FUZZY LOGIC CONTROL
Spectrum Sensing in Cognitive Radio
Spectrum Sensing in Cognitive Radio Networks: Requirements, Challenges and Design Trade-offs
Amir Ghasemi, Communications Research Centre Canada and University of Toronto Elvino S. Sousa, University of Toronto
measurements, the licensed spectrum is rarely utilized continuously across time and space [1]. Figure 1 shows spectrum utilization in the frequency bands between 30 MHz and 3 GHz averaged over six different locations [2]. The relatively low utilization of the licensed spectrum suggests that spectrum scarcity, as perceived today, is largely due to inefficient fixed frequency allocations rather than any physical shortage of spectrum. This observation has prompted the regulatory bodies to investigate a radically different access paradigm where secondary (unlicensed) systems are allowed to opportunistically utilize the unused primary (licensed) bands, commonly referred to as white spaces. In particular, the Federal Communications Commission (FCC) has already expressed its interest in permitting unlicensed access to white spaces in the TV bands [3]. This interest stems in part from the great propagation characteristics of the TV bands and their relatively predictable spatiotemporal usage characteristics. Building on this interest, the IEEE has formed a working group (IEEE 802.22) to develop an air interface for opportunistic secondary access to the TV spectrum. In order to protect the primary systems from the adverse effects of secondary users’ interference, white spaces across frequency, time and space should be reliably identified. Table 1 lists a variety of approaches that may be employed for this purpose. The first two approaches charge the primary systems with the task of providing secondary users with current spectrum usage information by either registering the relevant data (e.g., the primary system’s location and power as well as expected duration of usage) at a centralized database or broadcasting this information on regional beacons [4]. While leading to simplified secondary transceivers, these methods require some modifications to the current licensed systems and, as such, are incompatible with legacy primary users. Moreover, their deployment is costly and requires positioning information at
CognitiveRadio
distributed solutions closely follow the centralized solutions but they have the extra cost of message passing between nodes.
CRs can access primary base station through the licensed bands.
3
Spectrum sensing:
Cognitive radio user has the ability to sense the unused spectrum at any time and location. Based on the availability of the spectrum and other policies, CR user allocates the best available spectrum band. CR user shall vacate the spectrum in the presence of any primary user and move to next best available spectrum band
◦ Synchronizing transmission parameters (e.g. channel, time slot) between transmitter and receiver.
◦ Facilitating spectrum trading functions (e.g. spectrum bidding and pricing).
Spectrum Allocation behavior:
认知无线电系统的最优帧长设计

认知无线电系统的最优帧长设计胡志刚;汤海冰【摘要】This paper first derived the function between the transmission time and the interference for given Bayesian risk value. On this basis, the following two interference constraint algorithms were proposed, i. e. , the non-cooperative sensing mode frame length design algorithm to maximize system throughput and the cooperative sensing mode frame length design algorithm based on Newman-Pearson criterioa Simulations results have shown that, even if the Bayesian risk value is large, the proposed algorithm can achieved better throughput due to the optimization of the frame length, compared with the existing schemes.%建立了当贝叶斯风险一定时,发送时间与干扰之间关系的模型.在此基础上,提出了2种满足干扰约束的算法,单用户感知模式下最大化系统吞吐量时的帧长设计算法和多用户合作感知模式下基于纽曼-皮尔逊准则的帧长设计算法.仿真结果表明,同已有算法相比,由于帧长的优化,即使贝叶斯风险较大,新算法也能取得相对较优的吞吐量.【期刊名称】《湖南大学学报(自然科学版)》【年(卷),期】2013(040)001【总页数】5页(P98-102)【关键词】认知无线电;帧长;频谱感知;感知时间【作者】胡志刚;汤海冰【作者单位】中南大学信息科学与工程学院,湖南长沙410083【正文语种】中文【中图分类】TN92目前无线频谱已经相当拥挤[1],有耗尽的风险.但对各个频带占用情况的统计结果表明[2],3GHz以下频段的频谱资源占用率普遍较低,造成了频谱资源的严重浪费.究其原因,主要是由于对频谱资源实行固定授权分配机制.J.Mitola最早提出了认知无线电(Cognitive Radio,CR)的概念,其要点是认知用户(从用户)检测授权用户(也叫主用户)不占用其频谱时形成的“频谱空穴”,并利用这些空穴进行通信;而当主用户使用这些频谱时,认知用户必须及时退出.认知无线电系统在Mac层一般采用帧结构的方式,认知无线电系统的帧长主要由感知时间和数据发送时间组成.目前,关于认知无线电系统的帧结构[3-5]主要研究集中在感知时间的优化和数据发送时间的固定.文献[6-7]主要研究了一次感知多个信道情况下,感知时间的优化问题.以上文献都没有考虑主用户的活动情况,如果主用户到达率过大,认知用户的服务质量就可能得不到保证;同样,如果帧长过长,则可能由于认知用户的干扰,主用户的服务质量得不到保证.理想的情况是根据主用户的活动,设置最优帧长:感知时间和数据发送时间.文献[8]研究了主用户活动统计特性对认知网络吞吐量的影响,但其并没有研究帧长的优化问题.文献[9]研究了主用户对信道的占用/空闲(on/off)时间服从负指数分布、认知网络吞吐量最大时的最优帧长,但其假设认知用户在使用数据发送时间时,即使主用户到达,仍然占用整个数据发送时间,并不退出,也没有对感知时间进行优化.文献[10]基于主用户对信道的占用/空闲时间服从负指数分布,研究了当最优化感知效率(即认知用户发送时间占帧长的百分比)且干扰率满足约束时,感知时间和数据发送时间的优化问题,但其假设虚警概率等于误检概率,这不能满足一些应用对虚警概率和误检概率不等权需求的情况.本文首先将虚警概率和误检概率加权定义成贝叶斯风险,研究了当贝叶斯风险一定时,干扰率与发送时间的关系.在此基础上,提出了2种满足干扰约束的算法:单用户感知模式下最大化系统吞吐量时的帧长设计算法和多用户合作感知模式下基于纽曼-皮尔逊准则的帧长设计算法.这2种算法的目的是对感知时间和数据发送时间的优化.1 系统模型及问题描述1.1 单用户感知系统模型本文采用帧结构的认知无线电系统,认知用户基于overlay模式接入,假定每帧长感知一个信道,噪声为高斯白噪声.对主用户的活动情况,假设主用户任务对信道占用忙时间服从参数为α的负指数分布,信道空闲时间服从参数为β的负指数分布,则由排队论可知:式中:Pon和Poff分别为主用户信道忙和空闲的概率.认知用户每隔一个帧长周期检测主用户信号是否存在,接收信号可写成二元假设形式[10]:r(t)=hs(t)+n(t),当h=0时,表示主用户信号不存在;当h=1时,表示主用户信号存在;其中n(t)表示均值为零,方差为σ2n的高斯白噪声.σ2s为主用户信号s(t)的方差.本文采用能量检测,则基于主用户活动模型的检测概率Pd(λ,ts)和虚警概率Pf(λ,ts)可表示为[10]:式中:(λ,ts)和(λ,ts)分别为能量检测方式下的检测概率和虚警概率;ts为感知时间.式中:Q(x)为高斯补函数.1.2 问题描述针对上述给定的系统模型,本文的目标是解决当贝叶斯风险一定、干扰率控制在阈值内时,最大化认知用户的吞吐量情况下,认知网络帧长的最优设计问题.认知用户的吞吐量可表示为:式中:C为根据香农公式得出的信道容量,这里为常量.用(λ,ts)表示误检概率,在感知模型下,贝叶斯风险描述为,其优势是可根据实际需要决定虚警概率与误检概率的权重c1,c2.由于,贝叶斯风险又可表示为:当(λ,ts)=1时,(λ,ts)取最大值:当主用户对信道的占用/空闲服从负指数分布时,根据文献[10]中干扰率计算公式,可得出主用户与认知用户的干扰率为:式中:μ=max(a,β);T为一帧中数据发送时间;TI(T)即帧长为T时,主从用户互相干扰的概率,一般要求这个干扰率低于某一门限Tp.综上,本文的目标可表述成一个最优化问题P1.2 分析与求解本节求解最优化问题P1.由于目标函数非凸,一般的最优化方法如牛顿法、罚点函数法等难以求得全局最优解,且求得局部最优解也同初值密切相关.本文首先把问题P1的约束转化为等价的式(13)和式(14),巧妙建立了贝叶斯风险下帧长与虚警概率间的关系式(13),通过定理1及式(8)得出了(λ,ts)的取值区间式(16),再根据(λ,ts)取值区间较小的特点,提出了一个复杂度较低的算法.由式(3)和式(4)可得:将式(11)代入式(7)得:将式(9)和式(7)代入式(10),化简可得:令定理1F(T)有最小值.证令x=e-μT,因为x是关于T的单调函数且0≤x≤1,给定c1,c2,Poff,Pon和Tp时,对F(x)求导,可得F′(x)分子为x的一次函数,而分母总大于0.所以其最小值总在F(0),F(∞)或F′(T)=0处.其具体位置由给定的c1,c2,Poff,Pon,Tp决定.证毕.根据定理1,令结合式(8)有:对于某个(λ,ts)值,可根据式(14)和式(15)解得ts和T,代入式(7)解得吞吐量值R(λ,T,ts).根据式(7),c1,考虑到实际取值时虚警与误检概率的权重分配不会相差太大(即c1,c2的比值不会大太或太小).所以(λ,ts)的取值区间一般较小.因而可采用穷举搜索,以步长Δ搜索所有可能的(λ,ts),考虑到实际需求,可设Δ=0.001,求得最大吞吐量.根据以上分析,求解T*,t*s,λ*的算法如下:算法1 对于最优化问题P1的求解:1)根据式(15)确定.赋初值=;2)while(≤v/c1,步长Δ=0.001);根据式(12),解得ts;根据式(13),解得T;根据式(6),解得R(λ,T,ts);保存当前最大吞吐量R*及应对的,T*,t*s.3)将,t*s代入式(3),解得λ*.显然算法复杂度取决于,如设c1为1,v=0.15,循环次数最多为150次.3 纽曼-皮尔逊准则下最优帧长算法合作频谱感知已经有了许多研究文献[11-13],但很少有将感知时间和数据发送时间进行联合优化的研究.本节讨论当合作频谱感知时,纽曼-皮尔逊准则下的最优帧长.考虑到求解的复杂性,这里仅考虑λ已知时的情况,此时,记为.问题P2可描述如下:其中:当认知用户N中超过K个用户判决一致时,判决成立.为求解问题P2,本文先证明以下定理及推论.定理2Qd是关于¯Pd的递增函数,Qf是关于¯Pf的递增函数,且当¯Pd<K/(N -1)时,Qd为凸函数.当¯Pd>K/(N-1)时,Qd为凹函数.根据式(19)可知,U(x)为递增函数;根据式(20)当x<K/(N-1)时,U(x)为凸函数;当x>K/(N-1)时,U(x)为凹函数.推论1 给定λ,则均是关于ts的递增函数.证因为都是Q(x)函数,又Q(x)关于x递减,令所以y关于ts递减.综上(ts)是关于ts的递增函数.同理可证(ts)是关于ts的递增函数.推论2Qd是关于ts的递增函数.证根据定理2,Qd是的递增函数,根据推论1,是ts的递增函数,所以Qd是关于ts的递增函数.证毕.定理3Qd是关于Qf的递增函数.问题P2的求解思路是利用Newton-Raphson算法,解式(17)中的等式约束,得,根据定理3,此时Qd取最大值;再根据式(3),解得ts的上限值,而根据定理2,此时Qd取最大值.所以ts的上限值即为纽曼-皮尔逊准则下的最优值ts.最后根据式(9),显然,当,确定时,TI(T)为递增函数,所以Tminp=TI(0)=1-¯Pd(ts).综上,给出纽曼-皮尔逊准则下的最优帧长算法.算法2 问题P2的求解算法.1)根据Newton-Raphson算法,解式(17),得.2)将代入式(3),解得t*s;将t*s代入式(4),解得(λ,ts).3)如果Tp<1-(λ,ts),则无解;否则,根据式(9),解得T*.考虑到Newton-Raphson算法的复杂度可能与初值相关,因为Qf是关于¯Pf的递增函数,所以也可用二分法[14]来求解¯Pf.图1为在不同K值下Qd随ts的变化曲线.图2为满足约束Qf≤0.1时,根据算法2求解的不同K值对应的最大Qd.由图2可知,K=2时的最优值大于K=1时的最优值,这是因为当K=1时,ts值相对较小.图1 协作时检测概率随感知时间的变化Fig.1 The change of the detection probability with the sensing time in cooperative sensing mode4 仿真与性能分析为了验证帧长对干扰和吞吐量的影响,通过Matlab进行了仿真实验.实验基本设置为:α=1,β=2,B=10kHz,Tp=0.05,σ2n=1,snr=-5dB,c1=1,c2=1.首先仿真了Lee的最优帧长算法[10]与本文算法1.表1为干扰时间(共进行300s 仿真)、最优帧长及最优帧长下吞吐量等参数的对比.图2 不同K值时最大协作检测概率Fig.2 The largest cooperative detection probability for differentK由表1可知,2种算法在干扰率上相差不大,满足干扰门限要求,但本文算法在发送时间、感知时间参数上优于Lee算法.正是这一点,即使在风险值v较大的情况下,本文算法在吞吐量上优于Lee算法.图3为v=0.15时感知时间、发送时间及帧长与吞吐量的关系曲线.由图3可知,帧长在0.750s左右下降较大,这主要是因为数据发送时间T增加非常缓慢的缘故.需要指出的是虽然这时吞吐量同Lee算法比相差不大,但这只是风险值较大的情况.图3 当v=0.15时帧长与吞吐量的关系Fig.3 The relationship between the frame size and throughput whenv=0.15表1 仿真结果参数对比Tab.1 Parameter comparison of the simulation results 算法干扰时间/s感知时间/s发送时间/s最优帧长/s吞吐量/bps检测概率Lee 3.579 0 0.022 0 0.057 0 0.079 0 923.287 0 0.968 4本文3.500 6 0.017 00.075 3 0.092 3 927.314 7 0.989 6图4为v值对吞吐量的影响.由图4可知,随着风险值减小,吞吐量急剧提升.图5为风险值v与最优帧长的关系.由图4和图5可以看出,风险值对吞吐量和最优帧长均有较大影响,因为在实验基本设置下,根据式(13),(15)和(16)可得,v-Tp≤¯Pf(λ,ts)≤v,可以看出,Tp较小时,v变化对¯Pf(λ,ts)影响较大,进而影响吞吐量和最优帧长.而由式(12)和式(13),¯Pf(λ,ts)对t*s和T*的影响是非线性的,即对最优帧长的影响是非线性的.具体的实验参数导致在v=0.14时,最优帧长出现了一个拐点.图4 贝叶斯风险值对吞吐量的影响Fig.4 Bayesian risk value′s influence on throughput图5 风险值与最优帧长的关系曲线Fig.5 Bayesian risk value and the optimal frame length5 结论本文针对帧结构认知无线电系统,如果帧长设计不当,容易引起干扰的问题,提出一种满足干扰约束,指定贝叶斯风险时判决门限、认知用户感知时间和数据发送时间的联合优化算法,并研究了多用户协作感知时帧长的优化问题.仿真结果表明,在同样的干扰约束下,同现有的帧长设计算法相比,本文算法有更优的帧长,而且即使在贝叶斯风险较大时亦有更优的吞吐量.参考文献[1] AKYILDIZ I F,WON-YEOL L,MEHMET C V,etal.NeXt generation/dynamic spectrum access/cognitive radio wireless networks:asurvey[J].Computer Networks,2006,50(5):2127-2159.[2] AKYILDIZ I F,WON-YEOL L,MEHMET C V,etal.A survey on spectrum management in cognitive radio networks[J].IEEECommunications Magazine,2008,46(4):40-48.[3] LEE D J,JANG M S.Optimal spectrum sensing time considering spectrum handoff due to false alarm in cognitive radio networks[J].IEEE Communications Letters,2009,13(12):899-901.[4] KIM I,KIM D W.Optimal allocation of sensing time between two primary channels in cognitive radio networks[J].IEEE Communications Letters,2010,14(4):297-299.[5] JIAN H,XU C Q,LI L.Joint optimization of sensing time and decision thresholds for wideband cognitive OFDM radio networks[C]//Wireless,Mobile and Multimedia Networks(ICWMNN 2010):IET 3rdInternational Conference on.Beijing:IEEE,2010:230-233.[6] YAO H P,SUN X,ZHOU Z.Joint optimization of subchannel selection and spectrum sensing time for multiband cognitive radio networks[C]//Communications and Information Technologies(ISCIT):2010International Symposium on.Tokyo:IEEE,2010:1211-1216. [7] STOTAS S,NALLANATHAN A.Optimal sensing time and power allocation in multiband cognitive radio networks[J].IEEE Transactions on Communications,2011,59(1):226-235.[8] HOSSEINI S M,TEIMOURI M.Mathematical analysis of primary users characteristics effects on cognitive radios[C]//ICACT:2010the12thInternational Conference on Gangwon-Do.Korea(South):IEEE,2010:1252-1255.[9] PEI Y Y,HOANG A T,LIANG Y C.Sensing-throughput trade off in cognitive radio networks:how frequently should spectrum sensing becarried out?[C]//PIMRC’07.Athens,Greece:IEEE,2007:1-5. [10] LEE W Y,AKYILDIZ I F.Optimal spectrum sensing framework for cognitive radio networks for cognitive radio networks[J].IEEE Transactions on Wireless Communications,2008,7(10):3845-3857.[11] PEH E,LIANG Ying-chang.Optimization for cooperative sensing in cognitive radio networks[C]// Wireless Communications and Networking Conference.Kowloon:IEEE,2007:27-32.[12] ZHANG W,MALLIK R K,LETAIEF K B.Optimization of cooperative spectrum sensing with energy detection in cognitive radio networks[J].IEEE Transactions on Wireless Communications,2009,8(12):5761-5766. [13] FEI R,JIANG H.Optimal multi-channel cooperative sensing in cognitive radio networks[J].IEEE Transactions on Wireless Communications,2010,9(3):1128-1138.[14] SHEN J,LIU S,ZENG L,etal.Optimization of cooperative spectrum sensing in cognitive radio network[J].IET Communications,2009,3(7):1170-1178.。
Optimization of Cooperative Spectrum Sensing in Ad-Hoc Cognitive Radio Networks

Optimization of Cooperative Spectrum Sensing in Ad-hoc Cognitive Radio NetworksWenfang Xia,Wei Yuan,Wenqing Cheng,Wei Liu,Shu Wang,Jing XuDepartment of Electronics and Information Engineering,Huazhong University of Science and Technology,Wuhan430074,ChinaEmail:{xiawf,yuanwei,chengwq,liuwei,shuwang,xujing}@Abstract—Spectrum sensing is an essential functionality of cog-nitive radio networks(CRN).Among existing spectrum sensing methods,cooperative spectrum sensing is the most promising one which can achieve superior sensing performance by introducing spatial diversity of sensing data sources.Such cooperation also introduces additional information exchanging which leads to extra power consumption and reporting delay.In this paper, the optimal sensing performance problem is formulated as a nonlinear binary integer programming problem tofind suitable cooperative nodes minimizing the average detection Bayesian risk.The binary particle swarm optimization(BPSO)algorithm is adopted to obtain suboptimal solutions to cooperative nodes. Computer simulations show that the proposed scheme can significantly improve the sensing performance compared with the case that all neighboring nodes participate in sensing without discrimination under different scenarios.Index Terms—cooperative spectrum sensing;nonlinear binary integer programming;binary particle swarm optimization.I.I NTRODUCTIONThe conflict between the lack of frequency resources for wireless communication and the low utilization of authorized spectrum bands motivates cognitive radio(CR)technology which allows secondary networks share the authorized spec-trum bands without causing harmful interference to the pri-mary users(PU)[1].Thus CR systems should continuously perform spectrum sensing to reliably detect weak primary signals of possibly unknown types.An accurate spectrum sensing method is important to maximize the throughput of CR networks(CRN)while keeping the interference to the PU under a certain constraint.However,such a requirement faces a great challenge in wireless communication systems due to some factors,such as multipath fading,shadowing, interference and noise[2],[3].Recent research indicates that cooperative spectrum sensing can lessen the impact of such above factors and increase sensing performance by introducing spatial diversity of sensing data sources[2].Most existing work about cooperative spectrum sensing focuses on the study of data fusion algorithms under the assumption that sensing performance of all cognitive nodes are the same.Considering the sensing capabilities of cognitive nodes were different from each other due to geographical locations,antenna gains or performance of RF amplifiers[4], the optimal data fusion algorithm[5]and weight cooperation 1This work was supported in part by the National Nutural Science Foun-dation of China through the grant No.60602029and No.60772088method[6]were proposed to help reduce the impact of unreliable cognitive nodes.However,the extra cost of power and bandwidth resources for reporting shaky results cannot be avoided.Considering sensing capability of cognitive nodes, a sensing optimization scheme was proposed to improve the collaborative sensing performance in[4].However,the as-sumption of perfect reporting channel was not realistic[7]and the delay for information exchanging was ignored.Obviously, the reporting delay increases with the number of cooperative nodes,which will lead to the decrease of the time for observing and data transmission.Although the pipelined cooperative spectrum sensing strategy[8]can reduce the reporting delay at the greatest extent,strict synchronization is required for all cooperative nodes,which is undoubtedly a great challenge to CRN because of the low complexity requirement of hardwares, especially for ad-hoc networks owing to the continual change of the fusion center[9].To obtain the optimal sensing performance at the least cooperative cost,a cooperative node selection scheme based on the individual characteristics of every node is explored in this paper.The optimization of cooperative spectrum sensing is for-mulated as a nonlinear binary integer programming(NLBIP) problem with selection variables of cooperative nodes.Binary particle swarm optimization(BPSO)method is adopted to solve such a problem.According to the individual characteris-tics of cooperative nodes,including the sensing capability and reporting delay for local decisions,suitable nodes are selected for cooperative sensing to obtain the minimum detection risk under a certain bandwidth of control channel.The rest of this paper is organized as follows.The moti-vation of the proposed cooperative node selection scheme is described in Section II.The cooperative sensing scheme is introduced in Section III.In Section IV,the concept and the mathematical formulation of the optimal cooperative sensing performance problem are presented and the BPSO algorithm is detailed to solve such a puter simulations are provided in section V to verify the performance of the proposed algorithm.Finally,we draw a conclusion of our contributions in Section VI.II.M OTIVATIONThe increase of cooperative nodes helps improve the sensing performance[10],but results in additional bandwidth and power consumption.As we all know,the sensing capabilitiesFig.1.A typical scene of cooperative sensingof cognitive nodes may be different from each other[4]and the attenuation of reporting channels is hardly the same,which influences the cooperative sensing performance greatly[7]. Thus different cognitive nodes make different contributions to cooperative sensing performance[4].In conventional coopera-tive sensing schemes,all cognitive nodes participate in sensing indiscriminately.Some nodes with low sensing capability make nothing to the cooperative sensing performance but introduce additional cooperative consumption.In order to explain the problem clearly,we consider the scenario of Fig.1.CR0,with three neighboring nodes CR1, CR2,CR3,needs to transmit data and acts as the fusion center. CR0and CR3are shadowed over the sensing channel and cannot reliably sense the presence of PU due to the low SNR of received signals.CR1is shadowed over the reporting channel and its decisions cannot be reported to CR0exactly[11]. Assuming that CR0needs one cognitive node to cooperate in sensing,the SNR of sensing channels and control channels are shown in Table I.The simulated results of average Bayesian risk are shown in Table II.From Table II,it can be seen that the sensing performance of “Optimal”fusion rule is better than that of“AND”and“OR”and CR2is the best choice of CR0to cooperative sensing whatever fusion rule is chosen.When proper data fusion rule is adopted,better sensing performance also can be achieved with all three neighboring nodes cooperation.However,the required bandwidth of control channel and the power consumption will be far more than the case of only CR2participating in cooperation.From above analysis,it can be draw that better sensing performance can be obtained at the least cost by selecting proper cooperative nodes,for example,CR2in the scene of Fig.1.On the other hand,the selection of cooperative nodes is not only related to the sensing capability,but also related to the reporting channel of cognitive nodes.III.C OOPERATIVE S PECTRUM S ENSING S CHEMEIn cooperative spectrum sensing,each CR node observes the signals of PU independently and sends the observation statistics or decisions to the fusion center to make afinal decision.The fusion center usually is the central control node of networks,such as the AP in WLAN,the wireless router in MESH.Since there is no central control node in ad-hocTABLE IO NE E XAMPLE OF F IG.2CR0CR1CR2CR3Sensing Channel-10dB0dB0dB-10dBControl Channel-5dB5dB5dBTABLE IIA VERAGE D ETECTIONB AYESIAN R ISKCR0CR0,CR0,CR0,CR0,CR1CR1CR2CR3CR2,CR3 OR0.27630.16400.36350.3643AND0.36690.30870.21590.49080.4903Optimal0.21650.01060.36350.0108 networks and all the nodes are equal,the cognitive node which needs to transmit data acts as the fusion center and collects local decisions[12].The cooperative spectrum sensing model in ad-hoc CRN is shown in Fig.2.CR0is the node needing to conduct spectrum sensing and acts as the fusion center.CR i (i=1,···,M,where M denotes the number of cognitive nodes)is the cooperative nodes.The observed signal samples of CR i can be expressed by following two hypotheses.H0:x i(k)=n i(k)H1:x i(k)=h pi s(k)+n i(k),i=1,2,...,M(1) where x i(k)and n i(k)represent the received signal samples and the additive noise of CR i at time k,respectively.h pi is the gain of the sensing channel between the PU and CR i,and s(k)the PU signals.To simplify analysis,h pi is assumed to be unchanged in one sensing period and n i(k) is a Gaussian variable with zero-mean and unit variance, i.e.,n i(k)∼CN(0,1).The process of cooperative spectrum sensing shown in Fig.2can be divided into following steps.(1)Every cognitive node,CR i,observes the spectrum of interest independently and makes local decision D i by some local detection method.D i=1u i>λi−1u i<λi(i=1,...,M)(2)whereλi and u i represent the threshold and observation statistics of CR i,respectively.(2)All cooperative nodes report their decisions to CR0to make thefinal decision D by some data fusion algorithm.D=ϕ(D 0,D 1,...,D M)(3) where D 0,D 1,...,D M denote the signal of D0,D1,...,D M after passing through the reporting channel.IV.F ORMULATION OF THE O PTIMIZATION P ROBLEM Before discussing the problem of selecting suitable coop-erative nodes,we make the same assumption of[10]that the instantaneous channel state information of the sensing channel and reporting channel is available at the cognitive users.Fig.2.The model of cooperative sensing in ad-hoc CRNA.The Sensing Capability of a Single NodeConsidering the fact that no prior knowledge about primary signals is available,the energy detection is adopted as a local detection method in this paper.The false alarm probability P fi and the detection probability P di of CR i are as follows [6].⎧⎪⎨⎪⎩P fi =P r (u i >λi |H 0)=Q √N λi −σ2i √2σ2iP di =P r (u i >λi |H 1)=Q √N λi −(1+γi )σ2i √2(1+2γi)σ2i(4)where Q (x )=1√2π+∞xe −t 22dt is the complementary cu-mulative distribution function,γi =E S |h i |2Nσ2ithe signal-to-noise ratio (SNR)of CR i and the quantity E S represents the transmitted signal energy over a sequence of N samples during each detection interval.Generally,perfect wireless channel is not realistic since it is usually subject to fading [7].The SNR of the reporting channel between the fusion center and CR i is marked as ρi .To simplify analysis,BPSK is adopted to modulate local decisions in this paper.Other modulation scheme is applied,too.Then the channel error rate is P ei =Q (√2ρi ).Therefore,the detection probability P diand false alarm probability Pfi of CR i after passing through reporting channel are expressed as follows:P fi=P r (D i =1|H 0)=(1−P fi )(1−P ei )+P fi P ei (5a)P di=P r (D i =1|H 1)=(1−P di )(1−P ei )+P di P ei (5b)B.The Reporting DelayMost existing research about cooperative spectrum sensing neglects the transmission delay for reporting local decisions to the fusion center.We argue that the reporting delay can not be ignored,especially for large number of cognitive nodes,because the bandwidth of the control channel usually is constrained for limited spectrum resource.Fig.3shows the slot transmission model in cooperative sensing.Time is divided into slots (frames)with equal length.Each frame includes two processes:sensing and data trans-mission.The sensing stage also can be divided into two phases:observing and reporting.In the observing phase,all cooperative nodes observe the interested spectrum band and make local decisions which are reported to the fusion center in a scheduled order in the reporting stage.In Fig.3,τi denotes reporting slot of CR i ,τS the observing slot,T S and T R the sensing and data transmission duration,respectively.Fig.3.A sensing slotWe assume that the bandwidth of control channel is given,denoted as B.For BPSK modulation,the transmission rate is 1bit/second/Hz.Assuming the utilization rate of the control channel is 80%.The total reporting time isτR =K i =1βi10.8B=τR (β)(6)where K is the neighboring node number of CR0,β=[β1,β2,···,βM ]T .βi ={0,1}represents that CR i participatein cooperative sensing (βi =1)or not(βi =0).The total number of cooperative nodes is n = Ki =1βi and the sensing duration is T S =τS +τRObviously,T R decreases with the increase of T S when the frame duration T =T S +T R is a constant and the decrease of T R will lead to the decrease of throughput.To satisfy the least throughput requirements of CRN,T R should not be lessthan T req Rwhere T reqR means the minimum of T R that satisfies the throughput requirement of CRN.Thus there is an upperbound of T S ,denoted as T S max =T −T reqR.On the other hand,to minimize the interference to the PU and improve the sensing performance,T S should be as big as possible.Thus we set T S =T S max .Substituting (6)into N =f S τS ,we getN =f S τS =f S (T Smax−τR (β))(7)The increase of cooperative nodes number leads to a high space diversity gain and helps to improve the sensing perfor-mance.However,it also results in the increase of τR which leads to the decrease of a single nodes sensing capability.Hence,there exists a tradeoff between the sensing capability and the number of cooperative nodes.C.The Average Bayesian RiskThe average Bayesian risk of cooperative spectrum sensing can be expressed as follows.R =P (H 0)[P (D =1|H 0)C 10+P (D =0|H 0)C 00]+P (H 1)[P (D =1|H 1)C 11+P (D =0|H 1)C 01](8)where C ij (i =0,1,j =0,1)means the price when H j occurs while makes H i .We just consider two kinds of errors:the false alarm probability Q f and the missed detection probability Q m .Thus C ii =0,for i =0,1.However C 10and C 01may be different for various system requirements.Then the Bayesianrisk can be rewritten asR=P(H0)Q f C10+P(H1)Q m C01=C10[Q f P(H0)+αQ m P(H1)](9)whereα=C01C10.For conservative systems,we takeα∈(1,∞)andα∈(0,1)for aggressive systems.Eq.(4)gives the relevance functions between P fi(P di)and the parameters (N,σ2i,λi andγi).P ei is a function ofρi.According to[13], the optimal threshold isλ∗i=1+√1+2γi+4A i2σ2i(10)where A i=2(1+2γi)Nγi ln(1+2γi)P(H0)αP(H1),ln(·)denotes the nat-ural logarithmic function.Eq.(9)can be rewritten as follows whenσ2i=1.R=C10[Q f(N,γ,β,ρ)P(H0)+αQ m(N,γ,β,ρ)P(H1)](11) whereγ=[γ1,···,γM]T,ρ=[ρ1,···,ρM]T.By substitut-ing(7)into(11),we can obtainR=C10[Q f(γ,β,ρρ,f S(T S−τR(β)))P(H0)+αQ m(γ,β,ρρ,f S(T S−τR(β)))P(H1)]=C10[ Q f(γ,β,ρ)P(H0)+α Q m(γ,β,ρ)P(H1)](12) whereQf(γ,β,ρ)=Q f(γ,β,ρρ,f S(T S−τR(β))Qf(γ,β,ρ)=Q f(γ,β,ρρ,f S(T S−τR(β))In order to obtain the best sensing performance at the least cost,we have to select cognitive nodes based onγ,ρto minimize the Bayesian risk in cooperative spectrum sensing. Then the optimization problem can be described asmin Rs.t.βi∈S⊆{0,1}n(P1) It is difficult to prove that the optimal solution of(P1)exists. But assuming the sensing performance of all cognitive nodes is the same and the control channel is perfect,it can be proved that R is convex in n when reporting delay is considered. D.The Praticle Swarm Optimization AlgorithmThe optimization problem of(P1)is a typical nonlinear binary integer programming(NLBIP)problem which is differ-ent from the linear binary integer programming.There is no general method to obtain the strict optimal solution.Different authors have shown various methods to get the suboptimal solution,such as the simulated annealing algorithm,the neural network algorithm,the genetic algorithm and the particle swarm optimization(PSO)algorithm.The study in[14]in-dicates that PSO is simple and can converge to the optimal solution faster compared with other algorithms.Considering the agility requirement of CRN,the binary PSO(BPSO)[15] is applied to solve the optimization problem of(P1).The following algorithm can helpfind the optimal solution ofβto(P1).All neighboring nodes are assumed to participate in sensingfirst.(1)Generate the initial swarm involving Num particles with all elements of1,marked asβj,j=1,2,···,Num.Set the initial orientation vector v i(0)randomly.(2)Calculate the new direction vector for each particle based on the following function.v j(t+1)=ω(t)v j(t)+c1R1(t)(p j(t)−βj(t))+c2R2(t)(p g(t)−βj(t))where c1and c2are the acceleration parameters,R1(t)and R2(t)random numbers between[0,1],ω(t)the inertia weight. p j(t)and p g(t)are the optimal solutions ofβin the history of the j-th particle and the swarm at the time t,respectively.(3)Update allβby the following function.βj(t+1)=(R(0,1)<S(v j(t+1)))where R(0,1)is a random vector in[0,1],S(x)=11+exp(−x) is the Sigmode function,the values of v j(t+1)determines the probability that the elements ofβj(t+1)equal to1or0.(4)Calculate the average Bayesian risk of each particle using Eq.(11),and update p j(t)and p g(t)according to the constraints below.if R(βj(t+1))<R(p j(t)),then p j(t+1)=βj(t+1) if R(p j(t+1))<R(p g(t)),then p g(t+1)=p j(t+1) (5)If the termination condition is not satisfied,go to Step(2). Otherwise,stop and output p g(t).Thefinal p g(t)will be the optimal value ofβfor(P1),marked asβ∗.V.A NALYSIS AND S IMULATIONThe average Bayesian risk for different numbers of coop-erative nodes is simulated in Fig.4.The SNR of CR0is-10dB.The received SNR and wireless control channel SNR of all neighboring nodes are assumed to be the same and are set as-8dB and10dB,respectively.T S is3.125ms and the sampling rate32kHz.In Fig.4,CR Num equals to one means no cooperative nodes and only CR0itself carries out the sensing process.It can be observed from Fig.4that the average Bayesian risk decreases with the increase of the cooperative nodes only when the report delay is not considered.When the reporting delay is considered,R decreasesfirstly and then increases which means that R is convex in CR Num and there exists the minimum value of R denoted as R min.In other words,more cooperative nodes do not mean better sensing performance under constraint sensing slots.To describe the sensing performance improvement of the proposed scheme,the average Bayesian risk of the four scenes in Table III is simulated by applying the BPSO algorithm.The physical meanings of the four scenes are as follows.S1:The detection capacities of all neighboring nodes are the same,and the control channel is nearly a perfect channel for P ei≈0whenρi=10dB.S2:The received SNR of all neighboring nodes are the same while some nodes are shadowing from CR0and their control channel SNR is low.Fig.4.Average Bayesian risk performance vs.CR NumTABLE IIIT HE V ALUE OFγANDρIN F OUR S CENESScene No.γ(dB)ρ(dB) S1−5ones(1,10)10ones(1,10)S2−5ones(1,10)[5,-5,-5,5,-6,6,-5,6,-6,5] S3[-4,-10,-20,-20,-6,-4,-7,-3,-2,-20]10ones(1,10)S4[-4,-10,-20,-20,-6,-4,-7,-3,-2,-20][5,-5,-5,5,-6,6,-5,6,-6,5] S3:Some cognitive nodes are far away from primary transmitter and their received SNR is low.S4:Both the detection capacities of neighboring nodes and the SNR of the control channels are different.The minimum Bayesian risk of CR0itself sensing is0.38by applying the adaptive threshold parameters proposed in[13]. The initial value ofβis ones(1,10),where ones(1,m)means a1-by-m vector of ones.The results of twenty times of repeated simulation are presented in Table IV.It is shown that R min is not achieved at the case that all neighboring nodes coordinate sensing because of reporting delay.Choosing part of neighboring nodes to cooperate by adopting the BPSO algorithm can reduce the Bayesian risk and improve the sensing performance obviously. The optimal solution ofβ,i.e.β∗,of each scene converges to a steady vector,which verifies the stability of BPSO algorithm. The values ofβ∗show that the nodes with better sensing performance and higher quality of control channel are selected to cooperate in sensing.It should be explained that n=6is satisfied in S1all through twenty repeated times simulation and which nodes are selected to cooperate in sensing is random absolutely.This is coincide with the results that the optimal number of cooperative nodes is six for perfect control channel with5kHz bandwidth as shown in Fig.4.VI.C ONCLUSIONIn this paper,we proposed a novel cooperative node selec-tion scheme in ad-hoc CRN to minimize the average Bayesian risk.Based on the study of the influence of received SNR and reporting channel to the cooperative sensing performance, the cooperative node selection problem was formulated as an NLBIP problem and the BPSO algorithm was adopted toTABLE IVTHE B AYESIAN R ISK OF T WENTY T IMES S IMULATIONaverage Bayesian riskβ∗all nodes best average worstS1.1385.0707.0720.0731Ki=1βi=6 S2.1924.0774.0779.0831[1,0,0,1,0,1,0,1,0,1]S3.1335.0205.0222.0232[1,0,0,0,0,1,0,1,1,0]S4.1887.0466.0485.0498[1,0,0,0,0,1,0,1,0,0]solve it.Simulation results verified that the average Bayesian risk was reduced significantly compared with the case that all neighboring cognitive nodes participated in cooperative sensing and the proposed scheme improved the sensing per-formance by selecting suitable cognitive nodes to cooperate in sensing.Furthermore,the energy costs and the electromagnetic pollution to the environment would be decreased since some of the nodes do not participate in sensing.R EFERENCES[1]S.Haykin,Cognitive radio:Brain-empowered wireless communications.IEEE J.Select.Areas Commun.,vol.23pp.201-220.2005.[2] A.Ghasemi and E.S.Sousa,Collaborative spectrum sensing for oppor-tunistic access in fading environments.in IEEE Symp.New Frontiers in Dynamic Spectrum Access Networks,.Baltimore,USA,Nov.2005, pp.131-136.[3]W.Saad,Z.Han,M.Debbah,et al.,Coalitional games for distributedcollaborative spectrum sensing in cognitive radio networks.in Proc.COM2009.Rio de Janeiro,Brazil,Apr.2009,pp.2114-2122.[4]W.Lee,and D.H.Cho.Sensing optimization considering sensing ca-pability of cognitive terminal in cognitive radio system.in Proc.IEEE CrownCom2008.Singapore,May2008,pp.1-6.[5]L.Chen.,W.Jun,and S.Li,Cooperative spectrum sensing with multi-bits local sensing decisions in cognitive radio context.in Proc.IEEE s Vegas,USA,Mar.2008,pp.570-575.[6]Q.Zhi,,S.Cui.,and A.H.Sayed,Optimal linear cooperation forspectrum sensing in cognitive radio networks.IEEE J.Select.Topics Signal Processing,vol.2,pp.28-40,2008.[7] C.Sun,W.Zhang,and K.B.Letaief.Cooperative spectrum sensing forcognitive radios under bandwidth constraints.in Proc.IEEE WCNC 2007.HongKong,Mar.2007,pp.733-736.[8] F.Gao.,W.Yuan.,W.Liu et al.,Pipelined cooperative spectrum sensingin cognitive radio networks.in Proc.IEEE WCNC2009.Budapest, hungary,Apr.2009,pp.1-5.[9]Z.Qing.,L.Tong,A.Swami,et al.,Decentralized cognitive MACfor opportunistic spectrum access in ad hoc networks:A POMDP framework.IEEE J.Select.Areas Commun.,vol.25pp.589-600,2007.[10] C.Sun,W.Zhang and taief,Cluster-based cooperative spectrumsensing in cognitive radio systems.in Proc.IEEE ICC,Glasgow, Scotland,Jun.2007,pp.2511-2515.[11]K.B.Letaief,and W.Zhang,Cooperative communications for cognitiveradio networks.Proceedings of the IEEE,vol.97,pp.878-893,2009.[12]R.Chen,J.Park,and K.Bian,Robust distributed spectrum sensing incognitive radio networks.in Proc.IEEE INFOCOM,Phoenix,Arizona ,USA,Apr.2009,pp.1876-1884.[13]W.Xia,S.Wang,W.Liu,et al.,Fast adaptive threshold for cooperativespectrum sensing.in press J.Elec.&Inform.Tech.,2009.[14]T.Matsui,M.Sakawa,K.Kato,Particle swarm optimization for nonlin-ear0-1programming problems.in Proc.IEEE International Conference on Systems,Man and Cybernetics(SMC),Singapore,Jan.2008,pp.236-243.[15]J.Kennedy,and R.C.Eberhart.A discrete binary version of the particleswarm algorithm.in Proc.IEEE International Conference on Systems, Man,and Cybernetics(SMC),Orlando,FL,USA,Jan.1997,pp.4101-4108.。
信息类专业英语翻译

Dynamic topology:As the channel of communicationchanges, some of the neighbors who were reachable on theprevious channel might not be reachable on the currentchannel and vice versa. As a result the topology of the network changes with the change in frequency of operation resulting in route failures and packet loss.Heterogeneity:Different channels may support differenttransmission ranges, data rates and delay characteristics.Spectrum-Handoff delay:For each transition from onechannel to another channel due to the PU’s activity, thereis a delay involved in the transition called Spectrum- Handoff delay.All these factors decrease the predictability of the cause oftransit-delay and subsequent packet loss on the network. Thetime latency during channel hand-off in cognitive networksmight cause the TCP round trip timer to time out. TCP willwrongly recognize the delays and losses due to the abovefactors as network congestion and immediately take steps toreduce the congestion window size knowing not the cause ofpacket delay. This reduces the efficiency of the protocol insuch environments.动态技术:随着信道通信的变化,一些邻进信道的用户在原信道没有发生变化而在新信道发生变化,或者相反。
COOPERATIVE COGNITIVE RADIO SPECTRUM SENSING USING
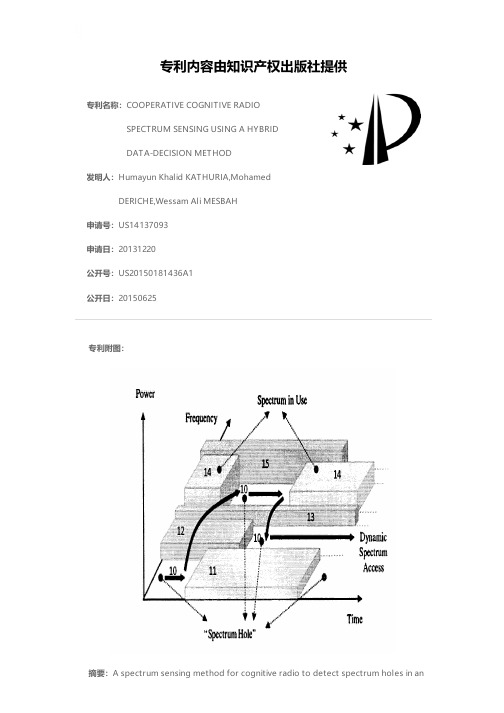
专利名称:COOPERATIVE COGNITIVE RADIOSPECTRUM SENSING USING A HYBRIDDATA-DECISION METHOD发明人:Humayun Khalid KATHURIA,MohamedDERICHE,Wessam Ali MESBAH申请号:US14137093申请日:20131220公开号:US20150181436A1公开日:20150625专利内容由知识产权出版社提供专利附图:摘要:A spectrum sensing method for cognitive radio to detect spectrum holes in anenvironment of bandwidth scarcity. The method comprises first receiving a wireless signal at a cognitive radio user, and then discovering the frequency edges of allocated frequency bands by using wavelet transform coefficients to detect discontinuities in the power spectral density of the received signal. After determining the allocated frequency bands, the method determines frequency band availability by detecting the in band energy using a bi-threshold energy detector, where the energy detector makes hard decisions and soft decisions. Finally, a fusion center combines hard and soft decisions collected from a cooperative spectrum sensing network of cognitive radio users and makes a final decision using a hybrid of data fusion and decision fusion to determine the final decision regarding spectrum availability.申请人:King Fahd University of Petroleum and Minerals地址:Dhahran SA国籍:SA更多信息请下载全文后查看。
同频信号分离在认知无线电中的应用
同频信号分离在认知无线电中的应用
THE APPLICATION OF THE SEPARATION OF THE SIGNALS WITH SAME FREQUENCY IN THE COGNITIVE RADIO
ABSTRACT
With the rapid development of the wireless communication business, more and more radio spectrum resources are needed, it makes that the current spectrum resources become less and less. Therefore, the study of the cognitive radio technology has great realistic significance.
KEY WORDS: cognitive radio, spectrum sense, energy detection, adaptive filter
ii
河北工业大学硕士学位论文
第一章 绪论
§1-1 课题的研究背景
随着越来越多无线通信业务的发展,频谱资源面临着前所未有的严峻局面。一方面,频谱资源是有 限资源,众多宽带业务的增长,使得现有的频谱资源越来越紧缺;另一方面目前基于固定频谱分配的频 谱资源利用率是很低的[1]。图 1.1 为北京 698-806MHz频谱的使用情况(地点:北京市海淀区,时间: 连续 7 天监测),从图中可以看出,698-750MHz述
同频信号,顾名思义,就是指载频相同的两路信号,但这两路信号可以是不同的调制方式或者是不 同的信号强度,以便用于区分。
在日常的无线电监测中,经常会遇到具有相同载频,但强弱不同的两个信号混合在一起进行传输的 情况,这种干扰严重影响了正常的无线通信业务,是无线电监测工作需要着重解决的问题之一。例如对 卫星链路的非法盗用和恶意干扰就是属于这种情况。再比如,不同的电台是用不同的载波频率来区分, 因此对于同一载波频率的不同电台,接收机往往很难进行区分。当两电台发射的同频信号到达接收点的
有关spectrumhandoff研究
空闲频谱的空时变化特性以及各种业务的不同QoS要 求是CRN目前面临的两个主要问题,而动态频谱管 理是解决这些问题最核心的技术。
目前关于动态频谱管理的研究主要分为频谱检测、频 谱判决、频谱共享和频谱移动性四个方面
而频谱移动性即频谱切换可使用户通过更新工作频谱 保持与CRN的持续良好连接。
按照之前决策的接入顺序,在每一次频谱切换时刻依次排队方式接 入相应信道。
对reactive没有查到具体文献,从“?”文献中可看出,应该多出了对 每个信道进行感知选择的过程。
排队接入模型:
高优先级队列存放 主用户,低优先级 队列存放次级用户, 相互不能串入。
发生频谱切换的用户 可以在当前信道排队, 即等待,此种用户在 认知队列中优先级最
关注的方面
❖ 频谱切换时刻 ❖ 频谱切换目的 ❖ 频谱切换方式 ❖ 频谱切换指标 ❖ 切换信道选择 ❖ 频谱切换前景
主用户到来
信对道主质用量户不的能保满护足CR业务需求 Proactive 保证认知用切户换通时信延的和持准续确性性和的业tr务adQeooSff Reactive 链路维W护a概it 率、切换延时、切换频数等等
3、由于现实中对主用户的状态、参数、位置等的观测不准确,加之阴影、 衰落、干扰、噪声更大的不确定度,使得fuzzy理论很有应用价值。
论域中元素:x, 依某隶属函数Uf,属于linguistic variable:T(x)
CR接 受到的 主用户 发射功
率
主用户 发射信 噪比
HO:是否切换
MOD:功率是 否调整
本文工作:推导了在虚警影响下,reactive方式下的感知时间的表 达式。 1、认为频谱切换可能是由虚警引起的 2、寻找目标频谱过程中,频谱感知也存在由虚警引起的检测错误。 3、对目标信道逐一感知,直到找到最佳信道,模式:
一种Overlay方式下的认知无线网络次用户通信QoS提升方案
一种Overlay 方式下的认知无线网络次用户通信QoS 提升方案杨世欣(西安医学院卫生管理学院 陕西西安 710021)摘 要 在讨论认知无线电技术的基础上,对认知无线网络的产生、发展及关键技术作简单分析,引出认知无线网络中次用户在使用授权频谱的通信过程中会遇到的问题;提出一种在传统、核心的Overlay 方式下可提高次用户通信QoS 的改进方案;并针对双射频设备的频谱感知规则给出了合理化建议,从而配合所提出的QoS 改进方案。
关键字 认知无线电;认知无线网络;Overlay ;频谱感知;QoSAn Overlay Mode of Cognitive Radio Networks Secondary User CommunicationQoS Promotion SchemeYang Shixin(School of Health Services Management, Xi’an Medical University, Shaanxi Xi’an 710021)Abstract Based on the discussion of cognitive radio technology, this paper briefly analyzes the generation, development and key technologies of cognitive radio networks, and points out the problems that secondary users of cognitive wireless network may encounter in the process of using authorized spectrum. This paper proposes an improvement scheme to improve QoS of secondary user communication under traditional and core Overlay. Some reasonable Suggestions are given for the spectrum sensing rules of dual rf devices, so as to cooperate with the proposed QoS improvement scheme.Keywords Cognitive Radio; Cognitive Radio Networks; Overlay; Spectrum Sensing; QoS当前,很多国家的频谱分配方式都采用固定的方式。
Cognitive Radio Sensor Networks
Ozgur B. Akan, Osman B. Karli, and Ozgur Ergul, Middle East Technical UniversityAbstractDynamic spectrum access stands as a promising and spectrum-efficient communica-tion approach for resource-constrained multihop wireless sensor networks due totheir event-driven communication nature, which generally yields bursty trafficdepending on the event characteristics. In addition, opportunistic spectrum accessmay also help realize the deployment of multiple overlaid sensor networks, andeliminate collision and excessive contention delay incurred by dense node deploy-ment. Incorporating cognitive radio capability in sensor networks yields a new sen-sor networking paradigm (i.e., cognitive radio sensor networks). In this article themain design principles, potential advantages, application areas, and networkarchitectures of CRSNs are introduced. The existing communication protocols andalgorithms devised for cognitive radio networks and WSNs are discussed alongwith the open research avenues for the realization of CRSNs. Cognitive Radio Sensor Networks•Adaptive and QoS-aware routing: New techniques consider-ing application-specific QoS requirements for varying chan-nel conditions need to be designed for real-time communication in CRSN.Transport LayerIn sensor networks the transport layer is mainly responsible for end-to-end reliable delivery of event readings and congestion control to preserve scarce network resources while considering application-based QoS requirements. To achieve successful detection and tracking of an event signal, event features must be reliably communicated to the sink without leading to con-gestion, which wastes power and communication resources.While this delicate balance between reliability and energy efficiency is also inherited by CRSNs, dynamic spectrum man-agement brings additional challenges such as varying channel characteristics (e.g., link delay, channel bit error rate, capacity, additional delay, and packet losses due to spectrum handoff) and temporal inability to transmit due to silent sensing periods.Furthermore, some applications such as target tracking and surveillance may also impose additional real-time delay bounds on the reliable communication requirements. More-over, effective transport layer solutions are also required, with even tighter reliability requirements, for delivery of queries, commands, and code updates in the reverse path (i.e., from the sink to the sensors) in CRSNs.Although there exist several transport layer solutions forreliable delivery with minimum energy consumption and con-gestion avoidance in WSNs, none of them considers dynamicspectrum access. In [3] a transport layer mechanism addressingdynamic spectrum access in cognitive radio ad hoc networks ispresented. However, it does not consider the inherent con-straints and requirements of sensor networks. Hence, there areseveral open research issues for transport layer in CRSNs:•Spectrum-aware reliability: New reliability definitions,objectives, metrics, and analytical modeling must be studiedin order to incorporate the fundamental variables of dynam-ic spectrum access.•Opportunistic energy-efficient transport: Energy-efficientcross-layer spectrum-aware transport protocols must bedeveloped for both event-to-sink and sink-to-sensor com-munication in CRSNs.•Real-time cognitive reliable transport: Adaptive real-timetransport solutions must be developed to address applica-tion-specific real-time reliability and QoS requirementsunder varying spectrum characteristics.Application LayerApplication layer algorithms in sensor networks mainly dealwith the generation of information and extracting the featuresof event signals being monitored to communicate to the sink.Other services provided by the application layer include meth-ods to query sensors, interest and data dissemination, dataaggregation, and fusion. Clearly, each of these services mustutilize the capabilities of a CRSN while conforming to its limi-tations. Therefore, existing application layer protocols must berevisited with these capabilities and limitations in mind.One of the potential areas that needs an application layerprotocol is overlay multiclass heterogeneous sensor networksdescribed earlier. For such applications, an application layerprotocol that analyzes and organizes user queries in a hetero-geneous network for efficient transmission is needed. Similar-ly, for multimedia sensor applications an open research issueis adaptive coding schemes that can employ various codingmethods depending on channel conditions and handoff rate.On the other hand, data aggregation and fusion techniquesthat aim to decrease communication cost with additional com-plexity have been widely studied. However, in CRSNs transceiversof the nodes may be tuned to different channels; thus, a nodecannot hear all transmitted data around it. New aggregation andfusion techniques that address CRSN’s limitations and takeadvantage of its additional capabilities must be investigated.Another open research issue is developing schemes to per-form sampling of the event signal and gather sensing databased on spectrum availability. If sensing results are sent to thesink periodically, mechanisms to schedule sampling and sensingbased on spectrum availability must be investigated. If sensingdata is sent based on queries from the sink, new query methodsthat take spectrum availability into account must be developed.ConclusionsIn this article we investigate CRSNs formed by incorporating cogni-tive radio capabilities in WSNs. We discuss advantages and limita-tions of CRSNs, and explore the applicability of the existingtechniques for cognitive radio and WSNs in CRSNs along with theirshortcomings. Clearly, there are many significant challenges in therealization of CRSNs. We anticipate that this article will providebetter understanding of the potentials for CRSNs and motivate theresearch community to further explore this promising direction.References[1] S. Haykin, “Cognitive Radio: Brain-Empowered Wireless Communications,”IEEE JSAC, vol. 23, no. 2, Feb. 2005, pp. 201–20.[2] G. Zhou, J. A. Stankovic, and S. H. Son, “Crowded Spectrum in WirelessSensor Networks,” Proc. 3rd Wksp. Embedded Net. Sensors, 2006.[3] I. F. Akyildiz, W. Y. Lee, and K. R. Chowdhury, “CRAHNs: Cognitive RadioAd Hoc Networks,” Ad Hoc Net., 2009; doi:10.1016/j.adhoc.2009.01.001[4] S. Gao et al., “Energy Efficient Adaptive Modulation in Wireless CognitiveRadio Sensor Networks,” Proc. IEEE ICC, June 2007, pp. 3980–86.[5] S. Byun, I. Balasingham, and X. Liang, “Dynamic Spectrum Allocation inWireless Cognitive Sensor Networks: Improving Fairness and Energy Efficien-cy,” Proc. IEEE VTC, Sept. 2008, pp. 1–5.[6] S. Gao, L. Qian, and D. R. Vaman, “Distributed Energy Efficient SpectrumAccess in Wireless Cognitive Radio Sensor Networks,” Proc. IEEE WCNC,Apr. 2008, pp. 1442–47.[7] J. Zhao, H. Zheng, and G. Yang, “Distributed Coordination in Dynamic SpectrumAllocation Networks,” Proc. IEEE DySPAN, Nov. 2005, pp. 259–68.[8] A. K. M. Azad and J. Kamruzzaman, “A Framework for Collaborative MultiClass Heterogeneous Wireless Sensor Networks,” Proc. IEEE ICC, May 2008,pp. 4396–4401.[9] C. Cormio and K. R. Chowdhury, “A Survey on MAC Protocols for CognitiveRadio Networks,” Ad Hoc Net., Feb. 3, 2009; [10] Q. Wang and H. Zheng, “Route and Spectrum Selection in Dynamic Spec-trum Networks,” Proc. CCNC, Jan. 2006, pp. 625–29.BiographiesO ZGUR B. A KAN[M‘00, SM‘07] (akan@.tr) received a Ph.D. degreein electrical and computer engineering from the Broadband and Wireless Net-working Laboratory, School of Electrical and Computer Engineering, GeorgiaInstitute of Technology, Atlanta, in May 2004. He is currently an associate pro-fessor with the Department of Electrical and Electronics Engineering, Middle EastTechnical University, Ankara, Turkey, and director of the Next-Generation Wire-less Communications Laboratory (NWCL). His current research interests are innext-generation wireless networks, cognitive radio networks, sensor networks,and bio-inspired nano-scale and molecular communications. He is an AssociateEditor for IEEE Transactions on Vehicular Technology, Editor for ACM/SpringerWireless Networks Journal and Editor for International Journal of CommunicationSystems(Wiley). He received the IBM Faculty Award 2008 and Turkish Academyof Sciences Distinguished Young Scientist Award 2008 (TUBA-GEBIP).O SMAN B. K ARLI(obkarli@.tr) received his B.S. degree in electronicsand communication engineering from Istanbul Technical University, Turkey, in2005. He is currently an M.S. student in the Department of Electrical and Elec-tronics Engineering, Middle East Technical University. His current research inter-ests include ad hoc cognitive radio networks and transport layer protocols for adhoc wireless networks.O ZGUR E RGUL(oergul@.tr) received his B.S. degree in electrical andelectronics engineering from Hacettepe University, Ankara, Turkey, in 2000. Heis currently a research assistant in the NWCL and pursuing his Ph.D. degree atthe Department of Electrical and Electronics Engineering, Middle East TechnicalUniversity. His current research interests include ad hoc cognitive radio networksand cooperative communication schemes for ad hoc wireless networks.。