ADAMS-Car路面生成技术总结
ADAMS CAR模块介绍
1.2.4驾驶员模块Driver
ADAMS/Driver 是一个可选模块,是 在德国的 IPG-Driver 基础上经过二次 开发形成的成熟产品。利用该模块, 可以提高车辆动力学仿真的真实感, 特别使用与装备有各种正负反馈的智 能系统(例如:ABS、4WS、CCS)的汽 车。
1.2.5 动力传动模块Driveline
1.2
ADAMS/CAR软件相关模块
SD EDM CSM Driver
3D Road Engine powered by FEV Durability Solver Controls
Driveline
CAR
MACHANISM/Pro
Exchange
1.2.1悬架设计软件包SD
Suspension Design 中包括以特征 参数(前束、定位参数、速度)表示 的悬架模型。通过这些特征参数,设 计师可以快速确定在任意载荷和轮胎 下的轮心位置和方向,在此基础上, 快速建立包括橡胶衬套在内的柔体悬 架模型。它采用的是全参数的面板建摸方式。借助悬架模 块,设计师可以提出原始的悬架设计方案。在此基础上, 通过调整悬架参数就可以快速确定满足理想悬架特性的悬 架方案。
立体平画法 曲面的多边形表示方法 和着色文件
波前文件 FEA载荷 储存模型几何形状和运动数据的输出文件 输出有关节点载荷的变化情况,供进一步的有 限元分析
电子数据表 以电子数据表格式输出的仿真分析结果
第4章 ADAMS/CAR在汽车操纵稳 定性中的应用
4.1 稳态转向试验仿真
2.2 仿真过程
Build
Test
Simulate &Review
PostProcessor
AdamsCar路面谱模型建立以及整车底盘部件载荷提
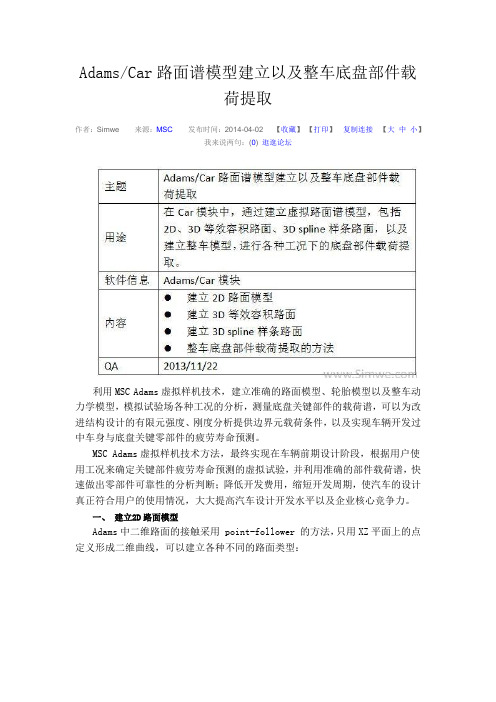
Adams/Car路面谱模型建立以及整车底盘部件载荷提取作者:Simwe 来源:MSC发布时间:2014-04-02 【收藏】【打印】复制连接【大中小】我来说两句:(0) 逛逛论坛利用MSC Adams虚拟样机技术,建立准确的路面模型、轮胎模型以及整车动力学模型,模拟试验场各种工况的分析,测量底盘关键部件的载荷谱,可以为改进结构设计的有限元强度、刚度分析提供边界元载荷条件,以及实现车辆开发过中车身与底盘关键零部件的疲劳寿命预测。
MSC Adams虚拟样机技术方法,最终实现在车辆前期设计阶段,根据用户使用工况来确定关键部件疲劳寿命预测的虚拟试验,并利用准确的部件载荷谱,快速做出零部件可靠性的分析判断;降低开发费用,缩短开发周期,使汽车的设计真正符合用户的使用情况,大大提高汽车设计开发水平以及企业核心竞争力。
一、建立2D路面模型Adams中二维路面的接触采用 point-follower 的方法,只用XZ平面上的点定义形成二维曲线,可以建立各种不同的路面类型:汽车主机厂通常会进行整车跨越三角形凸起路面工况,确认车辆行驶跨越突起路面时的前/后悬架系统、转向系统及车身受冲击受力(上下入力)强度的试验,此时就可以用二维路面描述建立路面模型。
各种不同形状的路面,通过在路面文件中定义各数据块参数完成定义,具体不同路面参数,如下图所示:上一页 1 23下一页二、3D等效容积路面建立3D 等效体积模型为三维的轮胎-路面接触模型,用来计算路面和轮胎之间交叉的体积。
路面是用一系列离散的三角形片来表示,而轮胎则用一系列的圆柱表示。
采用此路面模型,你可以模拟车辆在运动过程中碰到路边台阶、凹坑或在粗糙路面或不规则路面上运动的情形。
3D 等效体积路面模型为一般的三维表面,并用一系列的三角形片表示。
右侧的图表示一个由编号为 1 到 6 的六个节点构成的路表面。
六个节点共构成四个三角形的面单元,分别表示为 A、B、 C 和 D。
和ADAMSCar的基础操作和心得

ADAMS/Car的基础操作和心得1、如何永久改变ADAMS的启动路径?在ADAMS启动后,每次更改路径很费时,我们习惯将自己的文件存在某一文件夹下;事实上,在Adams 的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
2、如何将回放过程保存为AVI格式的电影文件,以便在其他场合使用?点击plotting(或F8)进入postprocessor ,右键--load ANIMATION,点击"play"开始仿真,点击"record"开始录制动画。
3、a/car Template Builder.为什么我看不见这个菜单选项??答:需要改一下的!在你的系统盘下去面。
例如我的C:\Documents and Settings\rickytang(rickytang 为我的用户名)下面有一个.acar文件,用记事本打开,然后将! Desired user mode (standard/expert) ENVIRONMENT MDI_ACAR_USERMODE standard改为:! Desired user mode (standard/expert) ENVIRONMENT MDI_ACAR_USERMODE expert 再启动car就可以看见选项了!进入car后按F9或者在tools下面选第一项就可以在模板与标准界面之间切换!4、关于communicatorcommunicator的出现是由于car是分块建模(子系统)为基础,而communicator告诉ADAMS 软件子系统之间如何连接,所以communicator的名字要完全一样才行,而且对于某一特定的子系统而言,有多少与外部系统、testrig的连接就需要有多少个communicator。
suspension parameter代表悬架特性反映,可参考公用模板中_trailing_arm.tpl和_mul t i_link.tpl。
基于ADAMS/Car的危险路段仿真识别系统模块开发
仿真识别方案模块 、 危险路段识别模块 , 完 善 了危 险路 段 仿 真识 别 系统 的 软件 平 台 , 使基 于 A DA MS / C r 的 危 险 a
路 段 仿 真 识 别 系统 更 具 有 实 用性 .
关键词 : A D A MS / C r; a V B 6 . 0 ; 仿真识别 ; 模 块 中图 分 类 号 : U 4 6 1 . 6 文献标志码 : A
Vo 1 . 3 2 No . 4
Dec . 20l 3
文章编号: 1 0 0 4—5 4 2 2 ( 2 O l 3 ) o 4 —0 3 9 6 — 0 3
基于 A D A MS / C a r 的 危 险路 段 仿 真 识 别 系统 模 块 开 发
王 小龙 ,于志 刚 ,邵 毅 明。
基金项 目 : 交通部科技基础应用—— 道路交通 事故多发路 段仿 真预测研究 ( 2 O 0 5 3 1 9 8 1 4 0 2 0 ) 资 助项 目
模型.
的多体系统动力学仿真软件 , 并将其与有限元分析、 模态分 析 、 优 化设 计 等 软 件一 起 组 合成 一 个 研 发 系 统l 2 J , 将动力学仿真技术应用于事故多发路段的仿 真识别 J . 在 A D A MS / C a r 软件 中, 欲 实 现 车 辆 行 驶
第 2 0 3 1 2 3 耄 年 l 第 2 4 塑 月
J o u r n a l o f C h e n g d u U n i v e r s i t y ( N a t u r a l S c i e n c e E d i t i o n )
成都大学学报 ( 自 然科学版 )
0 引 言
随着 汽车仿 真 技 术 的 飞速 发 展 , 国内外 众 多 汽 车设计 公 司 和 科 研 院 所 装 备 了 以 A D A M S _ 】 为 代 表
基于ADAMS/Car的路面附着条件对行车安全的影响分析
基于ADAMS的汽车脉冲路面仿真

基于ADAMS的汽车脉冲路面仿真宋年秀; 刘亚光; 张丽霞【期刊名称】《《汽车零部件》》【年(卷),期】2019(000)009【总页数】4页(P1-4)【关键词】脉冲路面; 脉冲输入; 平顺性【作者】宋年秀; 刘亚光; 张丽霞【作者单位】青岛理工大学机械与汽车工程学院山东青岛266033【正文语种】中文【中图分类】U270.20 引言汽车在道路上行驶时难免会遇到诸如减速带、凹坑、凸块等各种不平工况,当汽车通过这些障碍时,轮胎传至驾驶员座椅处的振动加速度会发生较大的波动。
为了将这种行驶工况考虑在内,通常情况下采用长为400 mm的三角形单凸块[1]。
根据试验条件不同,脉冲输入可用相应高度的凸块或减速带,而并未对为何使用三角形凸块或是减速带进行阐述。
针对国家标准GB/T 4970-2009[2]所提出的对路面脉冲激励的评价方法进行仿真分析。
首先基于ADAMS/Car,利用某普及型轿车的相关参数,建立包括悬架、车身、轮胎、转向系统在内的整车系统,对各车速下的包括:矩形凸块、斜角凸块、凹坑、减速带在内的6种脉冲输入进行平顺性仿真,并对仿真结果进行分析比较,得到更适宜作为脉冲输入的脉冲轮廓类型。
最后,在脉冲路面的仿真过程中,将随机路面考虑在内,使平顺性仿真更加符合实际工况。
1 整车模型的建立通过对该轿车的测量以及对其相关参数进行查询,得到了整车的主要参数,如表1所示。
在ADAMS/Car中,根据得到的相关参数建立各个子系统的模型,最后将其组装成整车模型并进行平顺性分析。
本文作者选用轿车的前后悬架分别为双横臂独立悬架以及多连杆悬架,对其进行建模得到如图1和图2所示的悬架模型,最终对各子系统进行装配得到如图3所示的轿车整车模型。
表1 整车主要参数参数数值整车整备质量/kg1 360底盘质心高度/mm560质心距前轴距/mm1 125质心距后轴距/mm1 450车身绕横轴转动惯量/(kg·mm2)6.2×108车身绕纵轴转动惯量/(kg·mm2)2.0×108前悬架垂直刚度/(N·mm-1)31前悬架阻尼系数/(N·s·mm-1)2.8后悬架垂直刚度/(N·mm-1)26后悬架阻尼系数/(N·s·mm-1)2.5前轮距/mm1 432后轮距/mm1 220前后轴距/mm2 631轮胎规格225/55R17图1 双横臂独立悬架图2 多连杆悬架图3 整车模型2 脉冲输入仿真2.1 脉冲输入的建立利用ADAMS/Car对汽车通过脉冲路面的振动进行分析时,可以使用插件Road Builder对脉冲路面进行3D建模,也可以使用后缀名为.rdf的TeimOrbit格式路面文件进行2D或3D路面的创建。
Adamscar在不对称路面制动仿真中应用
1.Adams/car简介Adams Car Studio提供轮式车辆性能分析的解决方案,是集专业化模板建模和行业标准分析于一体的应用环境,为用户快速完成轮式车辆的建模、专业化的分析、后处理以及设计方案验证提供了专业的方法和手段。
Adams Car Studio含有丰富的子系统标准模板以及大量用于建立子系统模板的预定义部件和一些特殊工具。
通过模板的共享和组合,快速建立子系统到系统的模型,然后进行各种预定义或自定义的虚拟试验。
车辆在实际行驶工况中,时常会遇到一些特殊工况,比如汽车在要经过一段坏路面,且左右轮经过的路面附着系数还比一样,驾驶员就会踩制动,由于左右轮制动力不一样(比如一侧是土路面,另一侧是结冰路面),肯定会发生偏转和侧滑工况,这种复杂工况下,就利用Adams/car方便快速的定义和模拟分析。
2.Adams工况定义方法Step1:加载模型打开adams/car,在标准界面下,打开MDI_demo_vehicle整车模型。
Step2:定义工况定义分析工况,选择braking on split;然后加入具体工况定义界面主要的工况定义参数见上图所示。
其中:a)方向盘控制方式有2中,lock值方向盘锁定,即驾驶员试验过程中握紧方向盘,free指方向盘自由运动,此工况比较危险实际中应用较少,本次案例以lock控制来说明;b)制动控制百分比,比如制动器最大控制力矩100Nm,设置50%即制动器制动提供50Nm的制动力矩,此值的设置依赖于制动器的参数设置;c)左右轮路面的附着系数值设置,参见下表(来源余志生《汽车理论》第三版),本次案例使用左轮行驶在土路(干)路面,右侧则是冰路面;点击ok,即提交求解器计算。
3.Adams结果后处理计算完成后,开始提取分析结果;Step1:观察仿真动画及整车轨迹从分析动画看出,整车在振动过程中出现明显的侧滑和偏转现象。
Step2:绘制曲线按快捷键键盘上的F8,加入Adams/postprocessor模块。
ADAMS总结
我的car,发动机,制动器,驱动半轴,车身,横向稳定杆,轮胎等参数总结用car能有大半年了。
前几日发表了几个帖子说过要与苦闷专研的兄弟共享学习经验的。
我就创建一个自己的帖子吧,把自己随时随刻的经验或是困惑拿出来与大家共享或讨论。
可能有些唠叨可我还是要感谢一下我应当感谢的:首先是领我入门的师兄;二是“逼”我上梁山可上海科曼公司;三是有这么好的一个simwe;四是武汉的我那帮从未叫过师兄的师兄们,五就是我的网上的难兄难弟们;六~~~~~~~~~~~一:发动机参数的修改:发动机模块本人认为是最难的模块,其难处有二,一是模型的建立主要就是与整车的communicators 这个我以前的帖子有说过,下面我会剪过来,这里就不重复了。
二就是建完发动机后对其参数的修改。
其中发动机参数修改有两大块1:build—parameter variable_table这个里面的参数应当好理解一些各位参考一下help应当不难2:build_general Data elements _spline_modify 然后在name对话框里选择gss_engine_torque,那里面你就可以看到采用的发动机文件。
(当然也可以直接到安装目录下找到)关键是对这个文件的理解,只有理解了才好修改。
(Z_DATA){throttle}0.01.00(XY_DATA){engine_speed <no_units> torque <Nmm>}0 0 0500 -20000 800001000 -42000 1350001500 -44000 2000002000 -46000 2450002500 -48000 2630003000 -50000 3100003500 -50000 3580004000 -50000 4040004500 -50000 4550005000 -50000 4750005500 -50000 4850006000 -50000 4680006250 -50000 4620006500 -52000 4550006750 -56000 4270007000 -60000 3700007500 -64000 259000最关键的就是这三列数据,很不容易搞懂。
ADAMS-Car路面生成技术总结
值得注意的是,上述两式中均为空间频率域表达式,与车速无关。如果车辆以恒定的速度在路 面上行驶,就可以用时间频率来代替空间频率:
G0u p 1 S( f ) fp
式中, f 为时间频率; u 为车辆行驶速度。 对于线性车辆模型来说,上式表示的路面谱可以直接用来作为频域分析的系统输入。然而,如 果车辆系统模型中有一些非线性的描述,如双刚度弹簧、非线性阻尼器、限位块撞击等,那么路面 模型则必须在时间域或距离域来加以描述。如果得不到实际测量的时间域或距离域信号,通常采用 谱密度方程重新“构建”一段路面。因为理论上讲,任意一条路面轨迹均可由一系列离散的正弦波 叠加而成。假如已知路面的频域模型,那么每个正弦波的振幅则可由相应频率的频谱密度获得,但 相位差则必须由随机数发生器产生。通过这种方法产生的时间域或距离域的路面,便可用于车辆的 非线性动力学分析。 2、时域模型
g (t ) 2 G0u w(t ) z
(2)滤波白噪声 为了能更加真实地反映路面谱在低频范围内近似为水平的实际情况,可以在路面谱模型中引入 一个下截止频率 f0 ,得:
S( f )
G0 u 2 G( f ) 2 2 f f0
2
同样,低通滤波传递函数 G ( j ) 改写为:
倍频带 1/3 倍频带 1/12 倍频带 从最低频带(零频率除外)到中心频率 0.0312m-1 从倍频带的末尾值到中心频率 0.25-1 从 0.2726m-1 到最高计算频率
在规定的带宽内对功率谱密度进行平均计算,其光滑计算公式为:
nH 1
[(n 0.5) Be nl (i )]S (nL ) S (i ) L nh (i) nl (i )
3.2 路面生成
3.2.1 路面不平度测量 采用路面不平度测量仪,它有单轨和双轨两种方式。路面不平度测量仪一般安装在车体或拖车 上,通过拖带的从动轮来测量不平度。如要测量左右两轮轨迹的路面输入之间的关系,可用双轨式 测量仪通过两个从动轮测得,在对路面不平度测量仪的悬架设计时,必须保证从动轮始终与地面接 触,保持在合理的行驶速度下,路面轮辙能被准确测量。在对路面测量信号处理及建模时,一般要 对信号的频率范围有所限制。通过频宽的上下截止,使得所建立的路面模型中只包括我们认为有用 的频率信号。相对一般汽车车轮来说,测量仪的从动轮较小、较硬,它通常由一个硬质的小窄轮胎 构成,由于汽车轮胎与地面有一定的接触长度,对路面不平中的小分量有包络效应,因而在建模时 无需反映哪些太细的路面纹理结构,而测量仪的硬质小轮比通常的车用轮胎小,可以测量出更多的 路面高频小幅值分量,故采用上截止频率的办法来滤掉这些分量,以简化数据处理工作。如果仅考 虑影响平顺性的频段信号成分,尽量提高其分辨率,则无需采集哪些伴随大波长(波峰和波谷)的 极低频段内的路面位移信号,可用带通滤波器将极低频信号去除。 通常实测所得的路面轮廓通常不会遵循某一特定的模式,如下图所示。假设所取的典型样段可 在一段距离内重复出现,那么就可以用代表性路段对该路面进行处理,将信号分解为一系列的傅里 叶分量, 并可表示为由各种波长的正弦波组成的集合。 例如以 20m/s 的车速行驶, 记录里程为 2400m, 记录时间 T 为 120s,那么由傅里叶变换可生成下图所示的线谱图。线谱的频率分别为 1/120Hz、 2/120Hz、3/120Hz 等。由于波段频谱方式反映了线谱分析的过程和方式,即线谱的位置取决于记录 的信号长度。如用功率谱密度代替频谱线就可克服这一不足,下图所示的功率谱密度表达即为路面 位移的频域描述,其频率范围还可扩展到 1/(2T)以下。
完整版的adamscar
快捷键: F9:adams/car 的 standard 和 template 界面进行切换;Admas/car进入 adams view:Tools---command navigator---acar---interface---switch----aview;数据阅读: tools---database navigater;Ctrl+z :返回;Bug:创立 part时选择center between two points时下边有三个坐标点, --- 先选between 3 ⋯ , 再选between 2 ⋯即正常显示;一、build 建模1.1 hardpointsLeft: 在左边创立点,同时在右边自动创立对称的点;(正前面为x负方向)形状:六半雪花状,绿色;1.2 construction frame构造框包含地点和方向信息,用于创立 part时的定位;(1)假如定位在一个点, orient axis to point 使用同一个点,则相当于定向时三个欧拉角为0,与大地坐标系一致;1.3 part1.3.1 general part1)一般零件指地点、方向、质量、惯量确立的刚体;2)创立方式①new创立的刚体不拥有几何形态,但包含质量、地点、方向;创立不拥有几何的体:直接创立即可;拥有几何的体:先用 new创立,而后再创立 geometry,隶属于该体即可;(这种状况 new创立时能够随意设置质量和转动惯量,而后创立几何时勾选caculate ⋯即可)②wizard创立的刚体有几何形态,连杆(需要两个硬点)、三角臂(三个硬点);成效等于:先创立 new体,而后创立 geometry,不过经过geometry创立的part 种类多一些;3)属性(1)location dependency:定位体的地点:(2)orientation dependency:定位体的方向:Euler angles:313规则,即绕z轴转---绕x轴转---绕轴转;Orient to zpoint-xpoint: 所选两个点的连线垂直于 zx 平面;安装件( mount part )1)基本属性以一个硬点定义安装件的地点;无质量零件;用于确立本系统中什么零件与其余系统中哪个零件相连;安装零件能够和其余零件创立拘束;2)命名假如选择了 inherit, 则会自动创立一个通信器(用于和其余系统零件般配);例:subframe_to_body - cil[r]_subframe_to_body( 通信器名称 );3)改正在 adams/car 中对左右对称的 mount进行改正,比方改正左件,则右件及通讯器都会进行相应改正;切换到 adams/view 中则不会;假如在 adams/view 中修改以后再在 car转接件( switch )1)基本属性无质量零件;用于多个零件的拓扑连结,需要一个硬点和多个 part ;跟着组装的达成,转接件会被自动删除;1.4 geometry1.4.1 armThickness (10): 以三个点所确立的平面为中间平面,两边各 5mm;颜色Maize: 玉米黄;1.4.3 outline创立 outline 时,假如一个环没法生成自己所需的路线,能够沿着某条路径进行连结,需要返回时,沿原路线返回,预计画重复的线,软件能自动删除;1.5 force1.5.1 damper减震器:两个体,两个体上的两个点;1.5.2 spring弹簧:两个体,两个体上的两个点;DM能够计算目前两个点之间的长度,作为弹簧的安装长度;1.6 suspension parameters1.6.1 toe/camber创立前束和外倾角度:前束角度为正,外倾角度为负;一般创立了 toe/camber 以后,会创立一个 frame 框进行定位,方便以后创建轮毂等体;1.6.2 character array设置车轮转向中心线,即转向节主销轴线;Geometry经过两点创立线;(创立以后线是不行见的)1.7 attachment1.7.1 joint1)active激活状态Always: 老是激活;Kinematic mode: 激活状态为运动学;(1)使用 kinematic 时:经常创立两个连结副(都设置为激活状态),履行运动学剖析时使用铰接副,进行适应态剖析时,用拥有弹塑性的轴套代替铰接副;1.8 基本操作平移整体平移:变换到 adams/view 框选全部,进行平移操作;在 adams/car 中 build---hardpoints---table, 对全部硬点进行平移操作即可;由于 adams/car 是从下到长进行建模的;模板进行切换12 版没有模型树,模型切换: view---template;删除能够直接右键删除;多项删除: edit---delete;1.9 communicator1.9.1 communicator test输入两个模板,输入其属性(地点 front\rear\body ⋯);进行通信器般配检查,检查两个模板般配的通信器,以便进行通信器改正;二、理论知识2.1转向构造2.1.1 adams/car构造件1)名称Steering gear:转向器;Steering wheel:转向盘、方向盘;!以下 4 个为模型中方向盘下的 4 个命名Steering column:转向柱管;Intermediate shaft: 中间轴;Steering shaft:传动轴;Tierod: 横拉杆;P.1itman arm:转向摇臂();Rack housing:齿条罩;Rack:齿条;Steering shaft:传动轴;Pinion:驱动齿轮;Subframe : 副车架;Rack pinion Steering:齿轮齿条转向系;Idler arm: 转向从动臂Pitman arm: 转向摇臂;Pivot :支点,center :中心点;Steering gear: 转向机;构造图转向系1)齿轮齿条转向系2)平行杆转向系问题1)._rack_pinion_steering转向盘和 mts_steering_column_to_body (安装件)之间为旋转副,安装件为何会是红色套筒;2.2 前悬架前悬架构造件1)名称Control arm: 控制臂;Upright: 立柱;Strut: 支柱;Spindle: 主轴;Leaf spring: 钢板弹簧;Wheel carrier: 转向节三角臂;Carrier link: 转向节立柱;Hub:轮毂;Knuckle:关节点;Tripot: 玻璃珠;Differential: 差动装置的; tripot_to_differential;Kingpin: 转向立柱;Toe/camber : 前束外倾;Hub_bearing: 轮毂方向;Subframe:副架;问题MDI_Demo_Vehicle_lt.TR_Front_Suspension1)joint为何会有rol_arm2 ;低控制臂和低控制臂 2 之间为挪动副,低控制臂 2 和立柱之间为球绞;高控制臂与立柱之间为球绞?;外横拉杆和内横拉杆之间为挪动副;jounce_stop 是什么?实例1)macpherson前悬挂(1)拓扑构造零件内外连结:控制臂:滑柱:转向节:完好版的adamscar2.3 车身 body构造1)名称Chassis:底盘;2.4 稳固杆构造1)名称Antiroll bar: 稳固杆;arb_...三、仿真3.1 问题办理(1)Id 为 53 号的 joint 有错误;查找该 joint :设置 icons--- 不显示 parts--- 在拘束上右键 info 即显示其编号(只有装置以后才有编号);。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S ( n) G0 n p
式中,G0 为路面谱密度不平度系数,其大小随路面的粗糙程度而递增;指数 p 表式双对数坐标 下谱密度曲线的斜率。有些情况下,路面谱密度公式包含的斜率可能不连续,这时,则可写成如下 形式:
n p1 n nd G0 ( n ) d S ( n) G ( n ) p2 n n 0 d nd
G ( j )
得到路面不平度位移时域表达式:
2 G0u j 0
(0 2 f 0 )
g (t ) 2 G0u w(t ) 2 f 0 z g (t ) z
通常, 下截止频率 f0 的取值范围可在 0.01Hz 附近, 以保证所得的时域路面位移输入与实际路面 谱尽量一致。 (3)四轮输入时的考虑 对于车辆在硬路面、直线行驶时,后轮的路面输入具有与前轮相同的输入轨迹,只是时间上存 在着一定的滞后。在恒定车速下,其滞后时间为轴矩与车辆行驶速度的比值。因而在车辆行驶动力 学时域仿真分析时,只需将前轮的路面输入模型滞后一定时间后再输入给后轮即可(ADAMS/Car 中定义 Calculated Time Lag,自动根据轴距等参数计算得到) 。 在整车建模及分析中,不仅需要考虑轴距滞后的路面输入,而且还要考虑左右车轮论矩的相关 程度。如果路面测量中采用双轨路面不平度测量仪,那么就可以测得左右轨迹之间的相关程度。 相关函数 (n) 在频域内描述了左右轮迹不平度中频率为 n 的分量之间线性相关的程度,其值在 0~1 范围内变化。当相关函数值为 1 时,表示左右轮迹路面输入完全相关;当相关函数值为 0 时, 表示左右轮迹路面输入完全不管, 二者随机变化。 左右轮迹路面不平度信号通常对于大波长情况 (即 低 频 段 ) 得 出 的 相 关 函 数 值 趋 近 于 1 ; 对 于 高 频 段 则 趋 近 于 0 ( ADAMS/Car 中 定 义 CORRELATION_RL 表示相关系数) 。 从统计意义上讲, 可以认为路面时各向同性的, 如表示斜率为 2.5 的空间频率, 即 S ( n) n 2.5 表 示了各向同性路面。据此,可以计算出不同轮矩(以 2b 或 B 表示)情况下其相关函数随频率的变化 曲线,如下图所示。
倍频带 1/3 倍频带 1/12 倍频带 从最低频带(零频率除外)到中心频率 0.0312m-1 从倍频带的末尾值到中心频率 0.25-1 从 0.2726m-1 到最高计算频率
在规定的带宽内对功率谱密度进行平均计算,其光滑计算公式为:
nH 1
[(n 0.5) Be nl (i )]S (nL ) S (i ) L பைடு நூலகம்nh (i) nl (i )
低频段内有些长波信号可能已经低于最小空间输入信号建模中,然而,对悬架设计而言,这些极低 频段信号成分其实并不太重要。机关如此,在路面信号建模中,对这些信号成分也要有所考虑。下 表列出了各种实测路面的模型参数参考值:
各种实测路面的模型参数 不平度系数 路面类型 下截止空间频率 斜率 断点处空间频率
G0 /(m3/cycle)
3.2 路面生成
3.2.1 路面不平度测量 采用路面不平度测量仪,它有单轨和双轨两种方式。路面不平度测量仪一般安装在车体或拖车 上,通过拖带的从动轮来测量不平度。如要测量左右两轮轨迹的路面输入之间的关系,可用双轨式 测量仪通过两个从动轮测得,在对路面不平度测量仪的悬架设计时,必须保证从动轮始终与地面接 触,保持在合理的行驶速度下,路面轮辙能被准确测量。在对路面测量信号处理及建模时,一般要 对信号的频率范围有所限制。通过频宽的上下截止,使得所建立的路面模型中只包括我们认为有用 的频率信号。相对一般汽车车轮来说,测量仪的从动轮较小、较硬,它通常由一个硬质的小窄轮胎 构成,由于汽车轮胎与地面有一定的接触长度,对路面不平中的小分量有包络效应,因而在建模时 无需反映哪些太细的路面纹理结构,而测量仪的硬质小轮比通常的车用轮胎小,可以测量出更多的 路面高频小幅值分量,故采用上截止频率的办法来滤掉这些分量,以简化数据处理工作。如果仅考 虑影响平顺性的频段信号成分,尽量提高其分辨率,则无需采集哪些伴随大波长(波峰和波谷)的 极低频段内的路面位移信号,可用带通滤波器将极低频信号去除。 通常实测所得的路面轮廓通常不会遵循某一特定的模式,如下图所示。假设所取的典型样段可 在一段距离内重复出现,那么就可以用代表性路段对该路面进行处理,将信号分解为一系列的傅里 叶分量, 并可表示为由各种波长的正弦波组成的集合。 例如以 20m/s 的车速行驶, 记录里程为 2400m, 记录时间 T 为 120s,那么由傅里叶变换可生成下图所示的线谱图。线谱的频率分别为 1/120Hz、 2/120Hz、3/120Hz 等。由于波段频谱方式反映了线谱分析的过程和方式,即线谱的位置取决于记录 的信号长度。如用功率谱密度代替频谱线就可克服这一不足,下图所示的功率谱密度表达即为路面 位移的频域描述,其频率范围还可扩展到 1/(2T)以下。
g (t ) 2 G0u w(t ) z
(2)滤波白噪声 为了能更加真实地反映路面谱在低频范围内近似为水平的实际情况,可以在路面谱模型中引入 一个下截止频率 f0 ,得:
S( f )
G0 u 2 G( f ) 2 2 f f0
2
同样,低通滤波传递函数 G ( j ) 改写为:
式中, nd 为双对数坐标下谱密度曲线断点处的空间频率。 实际上,上式仍有与实际情况不符之处,比如在空间频率趋向零时,所表达的路面输入振幅将 趋向无穷大,而实际路面并非如此,从实测的路面谱中也可看出,路面谱密度 S 的值在低频段趋向 平坦。基于这点考虑,可引入一个下截止频率 n0 ,即当频率低于 n0 时,谱密度幅值保持恒定。在极
2×10-8 4.6×10-7 5.6×10-7 1.7×10-5
p1
斜率
p2
n0 /(cycle/m)
0.01 0.01 0.01 0.04
nd /(cycle/m)
— 0.30 0.20 0.16
高速公路(M1) 主干道(A5) 支路 MIRA 石子路
2.59 2.75 3.15 5.9
— 1.16 2.42 1.55
对于多道路面不平度的统计特性,以各通道的功率谱密度函数和各通道间的互功率谱密度函数 或相关函数来描述。相关函数 (n) 表示如下:
(n)
2
S LR (n)
2
S LL (n) S RR (n)
式中, S LR 为左右轮迹路面输入的互谱; S LL 为左轮迹路面输入的自谱; S RR 为右轮迹路面输入 的自谱。 数据处理后的路面数据通常以曲线的形式给出,其中单道路面不平度的表达形式应包括未经光 滑处理的功率谱密度和经过光滑处理的功率谱密度曲线。而对多道路面谱数据的描述,除各单道功 率谱密度曲线外,还应包括相关函数曲线。 3.2.2 路面输入模型 1、 频域模型 对于不同等级的路面,主要区别在于路面粗糙程度的不同,通常用路面不平度系数 G0 来表示其 粗糙程度。如果将一段平滑路面的所有频谱成分的振幅均按一定比例增加,实际上就可形成一段粗 糙路面的路面谱。这样,就可以方便地用一个通用的谱密度函数来大致表达不同粗糙程度的路面, 以作为车辆系统的输入激励。设计空间谱密度为 S ,空间频率(等于波长 的倒数)为 n (单位为 cycle/m) ,则二者的关系可用下式表式:
由此可得到:
2 S (f ) 2 G0u 2 G ( ) 2 2 2
2 1
G ( j )
由此,传递函数 G ( j ) 表达式为:
2
4 2G0u
2
G ( j )
2 G0 u j
因此,路面不平度位移则可以写成时域表达的形式,即为通常所称的积分白噪声形式:
如果仅以基本行驶模型分析为目的,通常不考虑断点的影响,采用单斜率路面输入谱基本上就 可满足要求。假设不平度系数 G0 按下表取值,则斜率 p 通常取 2~2.5 为宜。
各种典型路面的不平度系数 G0 值 单位:m3/cycle 路面类型 高速公路 主干道 支路 范围 3×10-8~5×10-7 3×10-8~8×10-6 5×10-7~3×10-5 均值 1×10-7 5×10-7 5×10-6
j nL 1
S ( j) Be [n (i) (n
h
H
0.5) Be]S (nH )
nh (i) nl (i )
式 中 , S (i ) 为 在 第 i 个 频 带 内 的 光 滑 功 率 谱 密 度 ; nH INT(nh (i) / Be 0.5) ;
nL INT(nl (i) / Be 0.5) ; nl 为频率下限; nh 为频率上限; Be 为频率分辨率。
值得注意的是,上述两式中均为空间频率域表达式,与车速无关。如果车辆以恒定的速度在路 面上行驶,就可以用时间频率来代替空间频率:
G0u p 1 S( f ) fp
式中, f 为时间频率; u 为车辆行驶速度。 对于线性车辆模型来说,上式表示的路面谱可以直接用来作为频域分析的系统输入。然而,如 果车辆系统模型中有一些非线性的描述,如双刚度弹簧、非线性阻尼器、限位块撞击等,那么路面 模型则必须在时间域或距离域来加以描述。如果得不到实际测量的时间域或距离域信号,通常采用 谱密度方程重新“构建”一段路面。因为理论上讲,任意一条路面轨迹均可由一系列离散的正弦波 叠加而成。假如已知路面的频域模型,那么每个正弦波的振幅则可由相应频率的频谱密度获得,但 相位差则必须由随机数发生器产生。通过这种方法产生的时间域或距离域的路面,便可用于车辆的 非线性动力学分析。 2、时域模型
3.2.3 ADAMS 中的路面模型 2D 路面:路面参数只用 XZ 平面的点定义而形成的一条二维曲线 3D 路面:三维平滑类路面的统称。 其中: 2D 路面的接触采用 point-follower 的方法 (类似于一张平面的圆盘)。 下面为使用这种方法所用 的不同的路面类型: