精密机械设计基础(高清版)
合集下载
2024版机械设计基础PPT全套完整教学课件pptx
人机交互优化
通过改进人机交互方式,提高机械操作的便捷性和舒适性。
未来机械设计的创新点与突破
• 跨领域融合:将不同领域的技术和理念融 入机械设计,创造出更具创新性和实用性 的产品。
未来机械设计的创新点与突破
新材料应用
探索和应用新型材料,提高机械 产品的性能和寿命。
先进制造技术
采用先进的制造技术,如精密加工、 超精密加工等,提高机械制造的精 度和效率。
绿色设计
注重环保和可持续发展,减少资源消耗 和环境污染。
机械设计的发展历程与趋势
集成化设计
实现多学科、多领域的协同设计和优化。
个性化设计
满足用户个性化需求,提供定制化的设计方案。
02
机械零件设计基础
机械零件的分类与功能
传动零件
包括齿轮、带轮、链轮 等,用于传递动力和扭
矩。
轴系零件
连接零件
密封零件
机械制造工艺的优化与改进
工艺优化
通过对现有工艺的改进和优化, 提高产品质量和生产效率,降低
生产成本。
新技术应用
积极引进和应用新技术、新工艺、 新材料等,推动机械制造工艺的 创新和发展。
智能化制造
借助人工智能、大数据等先进技 术,实现机械制造工艺的智能化 和自动化,提高生产效率和果
完成齿轮减速器的三维模型设 计、二维工程图绘制及装配图
等。
案例二:轴承座的设计
设计背景
轴承座是支撑轴承并传递载荷的重要部件, 广泛应用于各种机械设备中。
设计步骤
确定轴承类型、选择轴承座结构形式、计算 轴承座尺寸、校核轴承座强度等。
设计目标
实现支撑轴承、传递载荷、保证轴的旋转精 度等功能。
机械设计的发展趋势与挑战
第一章精密机械设计的基础知识

静应力: 表面压碎 ——脆性材料, 表面塑性变形——塑性材料
变应力:疲劳点蚀——齿轮、滚动轴承的常见失效形式。
多数出现疲劳点蚀(局部应力大于许用强度)——在循环应力作用下接触表面产生疲劳裂纹,裂纹扩展导致表面小块 金属脱落。点蚀又分:扩张性点蚀(产生于硬度大的材料);局限性点蚀(产生于软载荷小的材料),疲劳点蚀使零件表 面失去正确形状、降低工作精度、产生噪声和振动、降低零件使用寿命。
在表面接触应力作用下的零件强度称 为接触强度
计算依据:弹性力学的赫兹公式
1)表面接触强度(应力)
(1)两圆柱体接触
2021/9/23
Hmax Hmax
F
1 b
2a 2
F
20
H
F
1Eµ 112
1µ22 E2
δH ——最大接触应力; Fμ——接触线单位长度上的应力,=F/b; ρ——两圆柱体在接触处的综合曲率半径。
B)对变应力情况下的强度:零件失效形式主要为疲劳断裂 (先形成初始裂纹---扩展直到断裂),它不仅与应力的大 小有关,还与应力循环次数有关。因此提出疲劳极限用 δrN的概念 特别是 当r=一定时,应力循环N次后,材料不发生疲劳破坏时
2021/9/2的3 最大应力称为表示。N—δrN关系图为应力疲劳曲线15
应力-应变图
2021/9/23
14
2)将零件在载荷作用下的实际安全系数sδ、sτ与许用安全 系数 [sδ]、[sτ]比较,其强度条件为
sδ=δlim/δ< [sδ]、sτ=τlim/τ< [sτ]
1)
A)对静应力情况下的强度:可以使用以上两种判断方法。 对塑性材料制成的零件取材料的屈服极限δs、τs作为零 件的极限应力;对脆性材料制成的零件取材料的强度极 限sb、τb作为零件的极限应力。
变应力:疲劳点蚀——齿轮、滚动轴承的常见失效形式。
多数出现疲劳点蚀(局部应力大于许用强度)——在循环应力作用下接触表面产生疲劳裂纹,裂纹扩展导致表面小块 金属脱落。点蚀又分:扩张性点蚀(产生于硬度大的材料);局限性点蚀(产生于软载荷小的材料),疲劳点蚀使零件表 面失去正确形状、降低工作精度、产生噪声和振动、降低零件使用寿命。
在表面接触应力作用下的零件强度称 为接触强度
计算依据:弹性力学的赫兹公式
1)表面接触强度(应力)
(1)两圆柱体接触
2021/9/23
Hmax Hmax
F
1 b
2a 2
F
20
H
F
1Eµ 112
1µ22 E2
δH ——最大接触应力; Fμ——接触线单位长度上的应力,=F/b; ρ——两圆柱体在接触处的综合曲率半径。
B)对变应力情况下的强度:零件失效形式主要为疲劳断裂 (先形成初始裂纹---扩展直到断裂),它不仅与应力的大 小有关,还与应力循环次数有关。因此提出疲劳极限用 δrN的概念 特别是 当r=一定时,应力循环N次后,材料不发生疲劳破坏时
2021/9/2的3 最大应力称为表示。N—δrN关系图为应力疲劳曲线15
应力-应变图
2021/9/23
14
2)将零件在载荷作用下的实际安全系数sδ、sτ与许用安全 系数 [sδ]、[sτ]比较,其强度条件为
sδ=δlim/δ< [sδ]、sτ=τlim/τ< [sτ]
1)
A)对静应力情况下的强度:可以使用以上两种判断方法。 对塑性材料制成的零件取材料的屈服极限δs、τs作为零 件的极限应力;对脆性材料制成的零件取材料的强度极 限sb、τb作为零件的极限应力。
精密机械设计的基础知识-16页文档资料

i1
n
1212...n2
2 i
i1
2、零件的特性误差估算 1)绝对误差估算 例如片簧的弹性变形
4 EFb33Lh f(L,b,h,E)
片簧变形的绝对误差为
dfd Lfd bfd hfdE
L b h E
写成增量形式,略去高阶无穷小,
fL fb fh fE
3、精度要求 精度是精密机械的一项重要技术指标,设 计时必须保证精密机械正常工作时所要求的精度。
4、经济性要求 组成精密机械的零部件能被最经济的制 造出来,这就要求零件结构简单、节省材料、工艺性 好,尽量采用标准尺寸和标准件。
5、外观要求 设计精密机械时应使其造型美观大方,色 泽柔和。
“活到老,学到老”,人需要不断的学习和思考,这样才会 进步!通过学习著名企业的一些宝贵资料和经典案例,不仅 能提升您的个人素质,同时也能为您以后的工作带来极大的 帮助,一个人的核心竞争力,源自于其学习力!为知识付费 是您最值得的投资!
三、精度 是表征测得结果与真实值的接近程度的量。精度的
高低是用误差的大小来度量的,误差越小,则精度越高。
四、误差的来源:
1、设计误差(原理误差)(产生于设计过程) 由于采用近似机构代替理想机构,或采用了近似
假设,使得设计的零件或机构在原理上产生了误差。
2、工艺误差 (产生于制造过程) 由于零件的加工和装配过程中,由机床、刀具、
二、是机指构实误际差机:构运來动自3精72度2 中与国理最想大机的构资运料库动下精载度之间的 偏差,常用机构位置误差和位移误差表示。 1、机构的位置误差: 当实际机构与理想机构的主动件 位置相同时,两者从动件位置的偏差。(B0B0’) 2、机构的位移误差: 实际机构与理想机构的主动件位 移相同时,两者从动件位移量的偏差。(B1B0 - B1’B0’)
精密机械基础-第2章精密机讲义械设计的工程力学基础2
G为剪切弹性模量
max Mn
3 静力学关系
圆轴横截面上微内力矩 总和等于该面上的扭矩.
得出
代入上式有
M n
IP
最大应力在横截面周边
令 式中
则有
Wt (或Wn) —抗扭截面模量(系数), 单位mm3, 仅于截面尺寸有关.
设
扭转强度、刚度条件和空心轴
扭转强度条件
max
பைடு நூலகம்
Mn Wt
[ ]
扭转刚度条件
l Mn dxMn l
0 GPI
GPI
工程上常用单位长度(1m)的扭转角不超过许用值[φ0]作为扭转 刚度条件,即有
Mn单位N·mm, G单位N/mm2
Ip单位mm4, [φ0]单位 °/m
从实心轴横截面上的切应力分布规律看出,最大切 应力在周边,轴心处为零,这部分材料的抗扭作用 未得到充分发挥,如将其移到周边以外,制成空心 轴,那么这些外移的材料可承受较大切应力,且距轴 心又远,可分担较大的内力矩,故在轴的截面面积 相同的情况下,空心轴的强度和刚度都大大提高.
➢ 强度校核: = FN / A [] ➢ 计算截面: A FN / [] ➢ 确定许用载荷: FN A[]
例3-1
第三节 剪切
▪ 剪切
一对大小相等、方向相反,且距离很近的横向力(剪力) 作用于物体两侧,物体受力后截面(受剪面)间产生相对滑 移错动(剪切变形). 滑移过大时物体被剪切破坏.
弯曲刚度 (两个度量) 挠度y:任意截面中心垂直移动距
l
离向上为正
转角θ:横截面绕中性轴转动的角
度逆时针为正
为便于工程设计,已将常见梁
的挠度、刚度编写计算公式制成表
格,实际计算时可查阅有关手册。
精密机械基础-第2章精密机械设计的工程力学基础1讲解

一个力可以平行于其作用线移到任意点,但必须附加 一个力偶,这个力偶的矩等于原力对新作用点之矩,则其 作用效果不变。
3.6 平面一般力系的简化 任意一个平面力系总可以简化为一个力FR(主矢量),和
一个力偶M(主矩)。FR等于力系各力的矢量和,作用于简化 中心;而M则等于力系各力对简化中心之矩的代数和。
1 刚体的概念
力是物体间的相互作用。 作用的效应- 外效应(运动效应) 内效应(变形效应)两种效应同时出现。
刚体 在受力情况下保持形状和大小不变的物体。 外力作用下物体视为刚体的情况:
①研究物体受力与运动关系时; ②由平衡条件求解物体所受外力时。 变形体 在研究物体受力与变形关系时,认为零件是弹性体.
共线的两个相互平行的力.力偶中的 二力之间的垂直距离d称为力偶臂.
力偶是物体受力的基本形式之一,不能化成更简单的力 或力系,其惟一效应是使物体产生转动。力偶对物体的转动 效应用力偶矩来度量。力偶矩为代数量,它等于力偶中的一 个力与力偶臂的乘积
与力矩一样,逆时针方向为正,顺时针方向为负.单位N·m
力偶矩的特点
平衡(一对平衡力)作用在一个物体上是不同的。
2.6 力的合成图解法
(1) 二力合成(平行四边形定律)
B FR
F2
O
F1
C A
简化
三角形法则
C
FR
F2
O
F1
A
合力大小 合力方位
FR F12 F22 2F1F2 cos
arctan F2 sin F1 F 2cos
(2) 力的分解 与分解不同,两个(或以上)
2 力的性质
2.1力的基本概念
力的三要素:作用点、方向、大小
对刚体而言,力具有可传性 即可沿作用线任意滑动。
精密机械设计基础4-3
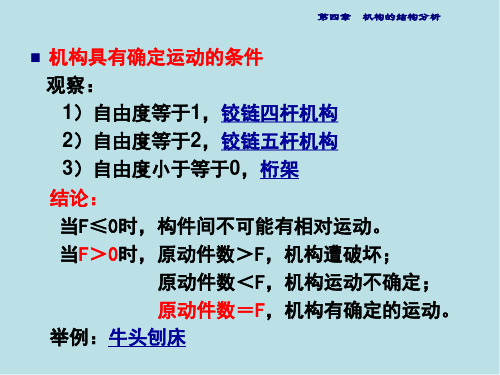
第四章 机构的结构分析
n=5, PL =6, PH=2, F=3×5-2×6-2=1
第四章 机构的结构分析
???
F 3n 2 pl ph 35 260 3
F 3n 2 pl ph 33 231 2
F 3n 2 pl ph 34 260 0
第四章 机构的结构分析
由m 个构件组成的复合铰链,共有(m -1)个
存在于特定几何条件或结构条件下。
◆ 虚约束
正确处理方法:将引起虚约束的构件 和运动副除去不计。
第四章 机构的结构分析
例题:计算图示机构的自由度。
n=3
PL=4 PH=0
2
1
3
虚约束
F=3×3-2×4-0=1
4
例题1 例题2 例题3
第四章 机构的结构分析
铰链四杆机构
若同时让构件3也为原动件, 即让构件3在由构件1确定位 置后还可以作独立运动,这 是无法实现的,若强迫构件 3独立运动,机构中薄弱构 件将被损坏。
引入构件2 (x2,y2,2)
引入构件1 (x1,y1,1)
2 1
1
3 4
最后构件3与机 架4铰接形成转 动副再引入两个
约束,此时机构 的F=(3-2)+(32)+(3-2)-2=1。
与机架4铰接形成转动副引入两个约 束,构件1相对于机架4的独立运动
数只剩一个1 。则F=3-2。
取构件0=1
第四章 机构的结构分析
例二:计算图示机构的自由度,并判断该机 构是否有确定运动。
第四章 机构的结构分析
例二:计算图示机构的自由度,并判断该机 构是否有确定运动。
复合铰链:C点。
局部自由度:滚子
虚约束:E和E’为 两构件组成导路平 行的移动副
精密机械设计基础-第十章轴

1、组成 2、轴的外形结构图10-3a图10-3b 3、零件在轴上的固定方法:
图10-3 轴的外形结构设计示例 1—连轴器 2—端盖 3—套筒 4—齿轮 5—滚动轴承 6—调整垫片
3、零件在轴上的固定方法:
(1)轴向固定: 轴肩、轴环、挡环、螺母、套筒等图10-4 (2)周向固定: 用平键、半圆键等 (3)轴向、周向同时固定: 销联接、紧定螺钉联接和压合联接
1)当采用六角头螺栓,
4KT F
(D D1 )zf
式中 D、D1——环形接合面的外径和内径 z —— 螺栓数目 f —— 摩擦系数
根据每个螺栓的预紧力F来校校螺栓的尺寸。
2、套筒联轴器图10-11
3、刚性联轴器优点: 构造简单、价格较低
4、刚性联轴器缺点: •对两轴的对中要求较高 •缺乏缓冲和吸振的能力
Fr
(La Lb
Lv )
48 (15 40
40)
66N
FrB
Fr La Lb
4815 18N 40
校核
FrA Fr FrB
66N (48 18)N
用类似的方法求水平面内的支点反力
FtA 118 .5N FtB 153 .5N
求垂直面内弯矩
M A Fr La 48 15 N mm 720 N mm
三、挠性联轴器
1、无弹性元件挠性联轴器 (1)盘销联轴器图10-12
1)结构
2)空回误差 '
注意: 减小空回误差方法
图10-12 盘销联轴器
(3)轴线不重合引起的传动误差图 10-13
1 2
sin e
sin 2
图10-3 轴的外形结构设计示例 1—连轴器 2—端盖 3—套筒 4—齿轮 5—滚动轴承 6—调整垫片
3、零件在轴上的固定方法:
(1)轴向固定: 轴肩、轴环、挡环、螺母、套筒等图10-4 (2)周向固定: 用平键、半圆键等 (3)轴向、周向同时固定: 销联接、紧定螺钉联接和压合联接
1)当采用六角头螺栓,
4KT F
(D D1 )zf
式中 D、D1——环形接合面的外径和内径 z —— 螺栓数目 f —— 摩擦系数
根据每个螺栓的预紧力F来校校螺栓的尺寸。
2、套筒联轴器图10-11
3、刚性联轴器优点: 构造简单、价格较低
4、刚性联轴器缺点: •对两轴的对中要求较高 •缺乏缓冲和吸振的能力
Fr
(La Lb
Lv )
48 (15 40
40)
66N
FrB
Fr La Lb
4815 18N 40
校核
FrA Fr FrB
66N (48 18)N
用类似的方法求水平面内的支点反力
FtA 118 .5N FtB 153 .5N
求垂直面内弯矩
M A Fr La 48 15 N mm 720 N mm
三、挠性联轴器
1、无弹性元件挠性联轴器 (1)盘销联轴器图10-12
1)结构
2)空回误差 '
注意: 减小空回误差方法
图10-12 盘销联轴器
(3)轴线不重合引起的传动误差图 10-13
1 2
sin e
sin 2
精密机械设计基础-r11支承-3

附加轴向载荷的计算
• 角接触球轴承和圆锥滚子
轴承轴向载荷Fa的计算 1、内部轴向力Fs
表11-9 此类轴承常成对使用, 反向安装。
2、轴向载荷Fa的计算
Fs1 Fx
Fs2
若 Fs1 Fx Fs2 则 Fa2 Fs2 F 's2
Fs1 Fx Fa1 Fs1
F’s2
若 Fs1 Fx Fs2 则 Fa1 Fs1 F 's1
角接触球轴承和圆锥滚子轴承
轴向载荷Fa的计算
轴向载荷Fa的计算的计算方法二:
对任一端轴承而言,其轴向载荷为下列两个 结果中取大值者:
(1)该轴承的内部轴向力;
(2)除该轴承内部轴向力以外的其余轴向力 的代数和。
Fa1/ 2
Fs
Fs1/ 2 2/1
Fx
取两者中大值
轴承寿命计算公式
L10
C P
滚动轴承的拆卸
轴承的配合
0654 2 0654 2
滚动轴承与轴配合的常用公差带
滚动轴承与外壳配合的常用公差带
轴承外径公差
轴承的配合
• 滚动轴承是标准件。 • 轴承内圈与轴-基孔制
轴承外径与壳体孔-基轴制 • 轴承内径与轴颈配合较一般圆柱面基
孔制同类配合紧。 • 在装配图中,轴承内、外径不必标注
安全在于心细,事故出在麻痹。20.12.2020.12.2005: 40:4405:40:44Decem ber 20, 2020
踏实肯干,努力奋斗。2020年12月20日上午5时40分 20.12.2020.12.20
追求至善凭技术开拓市场,凭管理增 创效益 ,凭服 务树立 形象。2020年12月20日星期 日上午5时40分 44秒05:40:4420.12.20