用解析法进行四连杆机构的运动学分析
数值方法在铰链四连杆机构运动分析的应用

R ANJ n -a S h o o Ma hnr n lc o, i j oyeh i U iesy Ta j 0 10 C ia U a g to( co l f c ie a dEet n Ta i P lt nc nvri , ini 3 0 6 , hn ) i y r nn c t n
,
牛顿法的迭 代格式 。
)
l (+ ) ( 1 ¨ ()
2 4 6 0
—
如 ’ ,. l.) .
() 6
-
、
5 0
l0 1 l0 2 0 2 0 3 5 0 5
30 3 0 0 5
西t ) ( 。
若( ) 非奇异 , 可通过解 方程 组( ) 则 6 产生序列 } 。判别 迭代终止的条件为 I I ( >0为预先设 置的精度 ) I Ax I e <e 。 对于铰链 四连杆机构 的几何方程组 ( )可将其整理为 1,
绕 A作匀速转动 , 由封闭矢量 四边形投影法可建立如下方程组f l 1
fcs l ∞币 = ∞也+4 lod+ ,  ̄ 2 Z
[ sn b+ 2 n ̄= n 1 i ̄ l1 i d2 3 j s
若令 。 ,. , = ., .
量形式
)0 =
, r . , . . 则方程组 ( ) 成向 2可写
( 2 )/ o++2o 2/o 3 0 咖 , -, s l/ s 一 ̄ s 一 c c+ +
( 2 ) s 4+2n 2l i4= 咖 , 1n lzi4-3n 30 i, s , s ,
l ● 皿 ■■ ■¨ _ . 1
() h 西 误差 曲线 图 3数值解与解析解的误 差曲线
中图分类 号 :H12 P 9 . 文献标 识码 : T 1, 3 1 T 9 A
液压支架四连杆机构设计及运动学分析
01 引言
03 参考内容
目录
02 机构设计
引言
液压支架是煤矿井下综采工作面的重要设备之一,用于支撑顶板和护帮,以 保证作业安全。四连杆机构是液压支架的重要组成部分,对支架的支撑力和稳定 性有着重要影响。本次演示将介绍液压支架四连杆机构的设计及运动学分析,旨 在为优化支架性能提供理论支持。
在仿生机器人的研究领域中,四足仿生马机器人是一种非常经典的案例。四 足动物,尤其是马,具有非常优异的运动性能和适应能力,因此模仿其运动特征 的机器人具有广泛的应用前景。本次演示将介绍一种凸轮连杆组合机构驱动的四 足仿生马机器人的构型设计与运动学建模分析。
该仿生马机器人主要由凸轮连杆组合机构、驱动装置和四肢关节等组成。其 中,凸轮连杆组合机构是机器人的核心组成部分,其作用是模拟马腿部的运动特 征,包括马腿的伸展和收缩。驱动装置则是控制凸轮连杆组合机构运动的关键部 件,其作用是提供动力,使机器人可以自主运动。四肢关节则是连接凸轮连杆组 合机构和驱动装置的枢纽,其作用是传递运动和动力。
1、降低摩擦损失:减少活塞、连杆和曲轴之间的摩擦是提高内燃机效率的 重要途径。我们可以采用低摩擦材料和润滑技术来降低摩擦损失。
2、优化结构布局:通过改变活塞、连杆和曲轴的结构布局,可以改善力的 传递路径,提高机构的稳定性和效率。例如,可以改变活塞形状、连杆长度和曲 轴半径等参数来优化结构布局。
3、精确控制燃烧过程:燃烧过程是内燃机工作的核心过程之一。通过精确 控制燃烧过程,可以优化燃烧效率,减少废气排放。例如,可以通过精确控制燃 油喷射、点火时间和进气流量等参数来优化燃烧过程。
4、优化冷却系统:内燃机的冷却系统对于保证其正常运行和延长使用寿命 具有重要意义。通过优化冷却系统的设计,可以降低内燃机的温度,减少热损失, 提高效率。例如,可以通过优化散热器、冷却风扇和循环管道等部件的设计来优 化冷却系统。
液压支架四连杆机构运动学分析

液压支架四连杆机构运动学分析周保卫【摘要】根据液压支架四连杆机构的几何关系和尺寸参数,建立了以前连杆水平倾角为自变量的液压支架四连杆机构运动分析通用数学模型.利用牛顿-辛普森算法确定各连杆的角度.通过编制MATLAB程序求解得到掩护梁与顶梁铰接点运动轨迹,以及各连杆运动参数随前连杆角度的变化规律,为液压支架的优化设计奠定了基础.【期刊名称】《煤矿机电》【年(卷),期】2018(000)004【总页数】4页(P78-80,83)【关键词】液压支架;四连杆机构;运动学【作者】周保卫【作者单位】阳泉煤业集团有限责任公司,山西阳泉045000【正文语种】中文【中图分类】TD355.410 引言液压支架是综合机械化采煤的重要设备,它可有效支撑和控制采煤工作面的顶板,并可隔离采空区,以防止矸石进入工作区域和输送机内,其性能和可靠性对综采成败影响重大。
液压支架四连杆机构是液压支架整体设计的重要环节,如图1中的虚线框所示,它主要由前连杆、后连杆、底座和掩护梁构成,其主要作用是保证支架在支撑顶板恒阻状态时纵向和横向的稳定性,作为主要承受和传递外载荷的部件,也保证了液压支架整体的刚度要求[1]。
因此,对液压支架四连杆机构的分析和研究很有必要。
液压支架的设计要求顶梁前端点的运动轨迹呈双摆线或近似直线,同时要求支架在整个伸缩范围内顶梁前端点运动轨迹的最大宽度尽可能小[2]。
由图1可知,四连杆机构设计的好坏决定了顶梁运动的轨迹,也决定了支架轮廓尺寸的变化。
因此,需要对液压支架四连杆机构进行运动学分析,计算顶梁与掩护梁铰接点的运动轨迹,进而为整体结构的优化设计奠定基础[3]。
对于液压支架四连杆机构的运动学分析,目前主要采用作图法或基于虚拟技术的仿真法[4]。
本文给出了一种求解液压支架四连杆机构运动学分析的解析法,以液压支架前连杆的水平倾角为自变量,推导出支架升降过程中顶梁与掩护梁铰接点坐标计算模型,同时可得到各连杆运动参数随前连杆倾角的变化规律。
用解析法进行机构的运动分析
不要针对每一个具体的机构列方程,而是对组成机构的杆组列 方程(杆组的类型是有限的,可先编好子程序)。所以此法具有较 大的通用性和适用性,且简便。但采用此法的前提条件是要利用计 算机。
二)杆组法运动分析的数学模型
1、构件(或原动件)的运动分析——同一构件上点的运动分析 已知该构件上一点的运动参数(位置、速度、加速
t1、2=
A
A2 B2 C2 BC
∴ θ3=2arctg t1、2 =2arctg
A A2B2C2 BC
同理可求θ2=?
θ3=2arctg t1、2 =2arctg
A A2B2C2 BC
说明:
1)“±”——取决于机构的初始安装模式: “+”号适用于图示机构ABCD位置的安装方案; “-”号适用于机构ABC′D位置的安装方案。 2)θ31、θ32——取决于从动件运动的连续性:
•
•
•
y B = y A +ψ i Licosψ i
••
对时间t再求导,得:x B =?
图b-1
••
y B =?
若A为固定转动副,即xA、yA为常数,则
•
x A
、y•A
、 、 • • • •
度),构件的角位置、角速度、角加速度,以及已知点到 所求点的距离。求同一构件上任意点的位置、速度、加速 度。
如 图 b-1 所 示 的 构 件 AB , 已 知 :
运动副A的(xA、yA、x•A
、y•A
、x• • A
、y• • A
)和
构件AB的(ψ i 、ψ • i、ψ• • )i 及AB的长度Li。
(
••
re iθ
) = -(
r
四连杆机构运动分析

四连杆机构运动分析
1、组装零件:
---放置第一个零件常采用缺省;
---连接零件可采用销钉连接方式(机构能运动);
2、进入机构运动环境
---应用程序|机构---
---编辑|重新连接--- /检查装配情况
---运行(连接组件)---是(确认)---
3、观察机构中的体
---视图|加亮主体--- /绿色表示为地体
4、拖动模型
---单击‘拖动’按钮---
---任选四连杆上一点,拖动鼠标进行拖动---
---单击中建,结束拖动---
5、建立伺服电机
---选择‘伺服电动机’按钮---
---定义电机名称,运动轴--- /若装配正确,运动处都会出现
运动轴
---定义电机速度、加速度--- /可单击图像查看
6、仿真运动过程
---单击‘机构分析’按钮---
---选择‘运动学’分析类型,单击‘运行’观察运动情况---
7、回放并保存结果
单击‘回放’按钮可以进行回放;
8、产生分析测量结果
---分析|测量,打开‘测量结果’---
---单击‘新建’按钮(在测量栏中),打开‘测量定义’--- ---选择测量点,测量分量,坐标系---确定---
/测量点可以是零件端点,基准点,几何点
---单击画图,可以绘制结果图形---
9、产生轨迹曲线
---插入|轨迹曲线---
---选择点---确定---
/零件顶点,几何点可以产生轨迹,基准点不能产生轨迹,可以在模型树种中右键零件‘打开’|草绘,绘制几何点;。
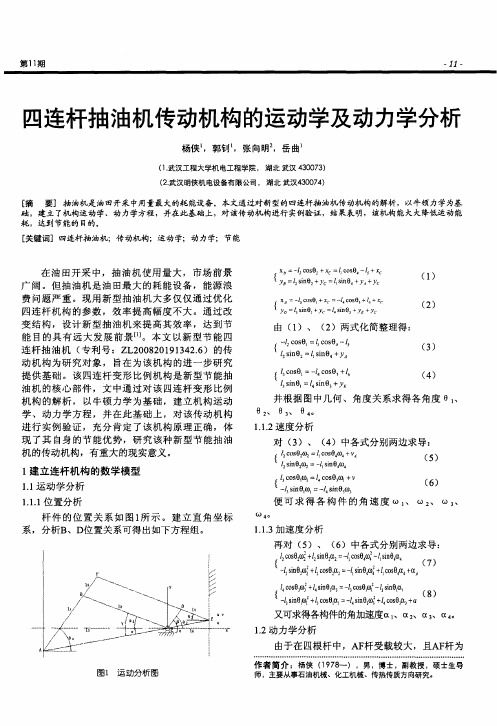
四连杆抽油机传动机构的运动学及动力学分析
伐 ( 7 )
‘ 0 1 麓 I‘ i 0 c3 。 ) c +0 l 1( 厶 = 4】 3 曲+ o口 s ㈤
l i0 3n s c 。 0 s -,i ts 0 n
又可求得各构件的角加速度c 、伐 、0 、 。 x c ,
1 . 2动力 学分 析 由于在 四根 杆 中,A 杆受 载较 大 ,且AF F 杆为
113加 速 度 分 析 ..
再对 ( ) 、 ( ) 中各 式分 别两边 求 导 : 5 6
fo “ 一 ?。 。 2 J c
∞
-
s0 lo 2 = /n +c 0 4c | 2 2 s0 -s0 I s(+ n ∞ 0c l 4 t c 2 i o x
’
{ O l+Y i Y 4+ Y ∞+ r十 s+:c c =n s0 0X , cn 2 :o ci ‘ =s 0
{ 1 , 3 。 -cO c - o3 , l s l ,
t 。=}sn y y li O =!sn 3÷ Y ti0 y
( 4)
并根 据 图中 几何 、角 度 关系 求得 各 角 度 0 、
02 、 0 3 04 、 。
11 速 度 分析 .. 2
对 ( )、 ( )中各式分 别两 边求 导 : 3 4
1 建立连 杆机构 的数学模型
11 . 运动 学 分析
111 置分析 . 位 .
{ 0z—‘曲0 fso ‘ i0 】 ,n 22 0 2 c s 4 1e c 咄 c n 4 o s i
在 油 田开 采 中 ,抽 油 机 使 用 量 大 ,市 场 前 景 广 阔 。但 抽 油 机 是 油 田最 大 的 耗 能 设备 , 能源 浪 费 问题 严 重 。现 用 新 型抽 油 机 大 多 仅仅 通 过优 化 四连 杆机 构 的 参 数 , 效 率提 高 幅度 不大 。 通 过 改 变 结 构 ,设 计 新 型 抽 油机 来 提 高 其 效 率 , 达 到 节 能 目的具 有 远 大 发 展 前 景 [。本 文 以新 型 节 能 四 1 】 连 杆抽 油 机 ( 利 号 :Z 2 0 2 1 1 4 .)的传 专 L 0 8 0 9 3 26 动 机 构 为 研 究 对 象 , 旨在 为 该 机 构 的进 一 步 研 究 提 供 基 础 。该 四连 杆 变 形 比例 机 构 是 新 型 节 能 抽 油 机 的核 心 部 件 ,文 中通 过 对 该 四连 杆 变 形 比例 机 构 的解 析 , 以牛 顿 力 学 为 基 础 ,建 立 机 构 运 动 学 、动 力 学 方 程 ,并 在 此 基 础 上 ,对 该 传 动 机 构 进 行 实 例 验 证 ,充 分 肯 定 了该 机 构 原 理 正 确 ,体 现 了其 自身 的节 能优 势 ,研 究 该 种 新 型 节 能 抽 油 机 的传 动机 构 ,有重 大 的现 实意 义 。
四杆机构运动分析
四杆机构运动分析四杆机构是一种常见的机械结构,由四根杆件组成,通过铰链连接。
四杆机构的运动分析是机械工程中重要的一环,可以帮助我们理解机构的运动特性和用途。
四杆机构有多种形式,如平行四连杆机构、交叉四连杆机构等。
在运动分析过程中,我们通常关注机构的连杆长度、铰链位置和运动轨迹等方面。
首先,我们可以通过连杆长度关系来确定机构的运动特性。
根据连杆长度的不同,四杆机构可以实现直线运动、旋转运动、摇杆运动等。
连杆长度决定了机构的运动范围和速度,可以通过运动学分析方法进行计算和模拟。
其次,铰链位置对机构运动有很大的影响。
铰链的位置决定了杆件之间的相对运动方式,如平行四连杆机构中的对外运动、交叉四连杆机构中的对内运动。
通过确定铰链位置,我们可以进一步分析机构的运动规律和应用。
另外,机构的运动轨迹也是运动分析的重点之一、运动轨迹描述了机构任意一点在运动过程中的位置变化。
通过分析运动轨迹,我们可以得出机构的最大行程、最大速度、加速度等参数,并且可以根据运动轨迹来优化机构的设计,满足特定的工程要求。
在进行四杆机构运动分析时,我们可以利用运动学分析方法,如广义坐标法、矢量法、逆运动学法等。
通过建立运动方程和约束方程,可以得出机构的运动规律和参数。
此外,计算机辅助设计软件和仿真系统也可以帮助我们进行四杆机构的运动分析。
通过输入机构的参数和初始条件,可以模拟机构的运动过程,观察各个杆件的位置、速度和加速度等变化情况。
四杆机构的运动分析对于机械设计和工程实践都具有重要的意义。
它可以帮助我们了解机构的运动特性,优化机构的设计,提高机械系统的性能和效率。
同时,运动分析也是机械工程师在机构设计和动力传动中常用的工具,通过运动分析可以得到有效的设计参数和工作条件。
四杆机构的运动分析是机械工程师必备的技术之一,也是机械工程教育中的重要内容。
平行四连杆机构的原理
平行四连杆机构的原理
一、机构组成
1.固定杆件:用于固定机构的位置,并提供支撑和稳定的作用。
2.连接杆件:主要包括连杆和摇杆两种杆件,用于连接其他杆件并传
递力和运动。
3.节点:杆件连接的交叉点,是机构运动的核心部分。
4.关节:由节点连接的连接方式,常见的有铰链连接和滑动连接。
二、运动分析
1.静态分析:
静态分析主要考虑机构在静止状态下,杆件间的几何关系和力学平衡。
根据杆件的长度和角度,可以得到机构的拉伸和挤压力,从而确定机构在
静止时的结构稳定性。
2.动态分析:
动态分析主要研究机构在运动过程中的速度、加速度等动力学特性。
通过运动学方法,可以推导出连杆的角速度和角加速度,并进一步得到节
点的速度和加速度。
经过大量计算和分析,可以获得机构在不同工况下的
运动轨迹和力学性能。
三、应用领域
1.工业机械领域:
2.机器人领域:
3.汽车工程领域:
平行四连杆机构被应用于汽车悬挂系统和发动机机构中。
汽车悬挂系统使用平行四连杆机构可以实现悬挂装置的平稳运动和减震效果,提高汽车的行驶舒适性和稳定性。
发动机机构通过平行四连杆机构的运动,实现节气门的打开和关闭,控制发动机的进气和排气过程。
四、总结
平行四连杆机构是一种常见的机动装置,通过杆件的相对运动实现机构的工作。
它的原理是通过静态和动态分析来研究机构的运动特性,并应用于工业、机器人和汽车工程等多个领域。
平行四连杆机构的运动稳定性和精度高,具有较广泛的应用前景。