平面四杆机构的运动仿真模型分析
平面四杆机构的运动仿真模型分析
3平面四杆机构运动模型的建立及其分析ﻫ3.1运动模型的建立ﻫ 在UG NX5的Motion环境里,分别建立3个Link(连杆)即AB、BCE和CD以及4个Revolute Joint(旋转运动副),其中J001(即A点)和J004(即D点)为AB杆和CD杆的旋转运动副,而且J001还有一个常数驱动,其初始速度为30°/Sec,如图4所示。需要指出的是,为了使四杆机构中的E点在后处理中能够生成运动轨迹,需要在E点添加一个关联点(Associate Point),在建立连杆BCE时将该点添加到连杆中,然后选择该点作为运动轨迹(Trace)点,在后处理中将其生成轨迹;同时为了使四杆机构中的E点在后处理中能够生成运动规律曲线,需要在E点添加一个记号点(Marker),然后在后处理时选择该记号点作为运动对象(Motion Object)以生成相关的变化规律曲线。
2.2平面四杆机构的建模ﻫ 由于物料传送机构为曲柄摇杆机构,所以它符合曲柄存在条件。根据机械原理课程中的应用实例[1],选取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。
在UG NX5的Sketch环境里,创建如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE'为通过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。现通过草图里的尺寸动画功能,令AB与AD的夹角从0°到360°变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,其中图3(a)中的E点为水平轨迹的起点,图3(b)中的E点为水平轨迹的中点,图3(c)中的E点为水平轨迹的终点,而图3(d)中的E点为圆弧轨迹(图中未画出)即回程的中点。
平面四杆机构的运动仿真模型分析
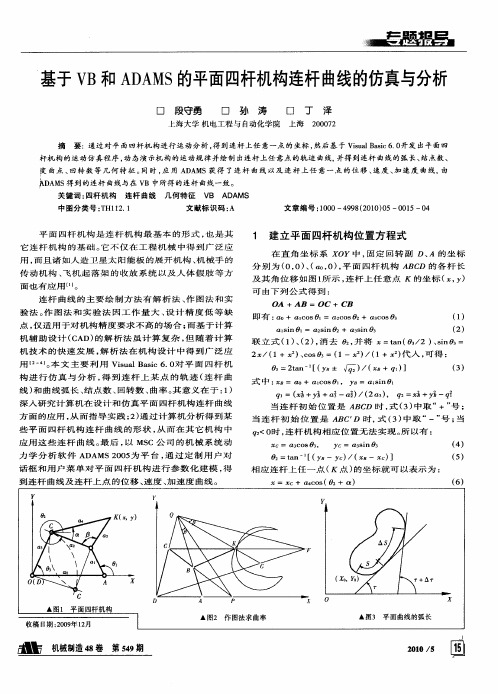
基于VB和ADAMS的平面四杆机构连杆曲线的仿真与分析
口 段守 勇 口 孙 涛 口
上海
丁
泽
上海大学 机 电工程与 自动化学 院
摘
20 7 002
要 :通 过 对 平 面 四 杆机 构 进 行 运 动 分 析 , 到 连 杆 上 任 意 一 点 的 坐 标 , 得 然后 基 于 Vsa B s . 开 发 出平 面 四 i l ai6 0 u c
机 辅 助 设 计 ( Ao) 解 析 法 虽 计 算 复 杂 , 随 着 计 算 c 的 但
即 有 : 0 口 c 8 1 0C S 2 口 c 8 3 口 + lo 0 = 2O 0 + 3o 0
。 sn0 = a sn 2 口 sn0 li 1 2i 0 + 3i 3
() 1
() 2
可 由下列公 式 得到 :
0. + A B = 0 C + CB 4
连杆 曲线 的主 要绘 制 方法 有 解 析法 、 图法 和实 作 验 法 。 图 法 和实 验 法 因工 作 量 大 、 计 精 度低 等 缺 作 设 点 , 适 用于对 机构 精度 要求 不高 的场 合 ; 基 于计算 仅 而
机 技术 的 快速 发展 , 析法 在 机构 设 计 中得 到 广泛 应 解
用 一1本 文 主 要 利 用 Vi a B sc6 0 平 面 四 杆 机 。, 到 连 杆 上 某 点 的 轨 迹 ( 杆 曲 得 连 线 ) 曲线 弧 长 、 点 数 、 转 数 、 率 。 意 义 在 于 : ) 和 结 回 曲 其 1 深 入 研 究 计 算 机 在 设 计 和 仿 真 平 面 四杆 机 构 连 杆 曲 线 方 面 的 应 用 , 而 指 导 实 践 ; ) 过 计 算 机 分 析 得 到 某 从 2通
基于MATLAB的平面四连杆机构运动仿真

12端 点 B运 动分析 .
在 复 数 坐标 系 中 ,端 点 B的位 置 可 表 示 为 B ri,则 =2 ̄ e2
6
』Brn02 I =c2 I 2si O R 2s e o mB=r
速度分别为 :
( 5 ) 一
。
4
2
分 别 对 上 式 求 一 次 、二 次 导 数 ,得 到 B点 的 速 度 、加
[ ] 孙 桓 , 陈作 模 . 械 原 理 [ ] . 京 : 高 等 教 育 出版 社 1 机 M 北
2 0 . 0 6
( 转第 8 下 4页 )
1 00
5 0
>
一
5 0
。
10 0
图 4 交 替 反相 层 叠 下 相 电 压 波形 及 对 应 频谱
1 0. 0 0
lve i v re sa d DTC o rd v p lc t n .I E a so e l n etr n mo r e a p i ai s EE Tr n n i o
[ ] 刘风 君 ,多 电平 逆 变技 术及 其 应 用 [ ] , 京 :机 械 工 业 出 4 M 北
1 00 0 .
8 . 0O
.
5 0 0.
≮ 0
一
S O 0.
一
1 0. 0 0 0
^ 1 j f
1 0 2 0 0. 0. 3 0 400 0. . 500 6 0 . 0。
越
0 20 . 40 . 60 . 80 . 1 0 0.
t / ms
0
~
.
ll1 斟 s2 v t c西 m o2 B j
l 『 Is 一s i I 一 c ].∞ o h1 I l +s c o j
基于MATLAB的平面四连杆机构运动仿真.
图2~4分别为θ4角速度、点C的速度变化曲线。
4结论
本文在复数向量坐标系中推导了四连杆机构运动方程,并应用MATLAB软件进行了连杆机构运动数值仿真。从计算结果可以看出,该方法可以方便快捷地得到连杆运动参数,能够有效提高分析效率和计算精度,可进一步推广到多连杆机构设计及优化计算中。
文章编号:1009-9492(201104-0051-02
引言
四连杆机构因其结构灵活、能够传递动力并有效地实现预定动作,在很多领域得到了广泛应用
[1]
。进行连杆机
构运动分析,传统方法主要是图解法或分析法[2]
,无论设
计精度还是设计效率都相对低下,无法满足现代机械高速高精度的要求。随着计算机技术的飞速发展,特别是以
面四杆机构[J ].机械制造, 2002,
(3:26-28.
[3]周进雄,张陵.机构动态仿真[M ].西安:西安交通大学出
版社, 2002.
[4]李娟玲,张建峰.基于C语言的平面连杆机构的运动分析
[J ].机械研究与应用, 2006, 19(5:117-120.
[5]宋兆基. MATLAB6.5在科学计算中的应用[M ].北京:清
华大学出版社, 2005.
[6]王正林.精通MATLAB科学计算[M ].北京:电子工业出
版社, 2009.
[7]曹惟庆.机构设计[M ].北京:机械工业出版社, 2004. [8]李洪涛,徐巍华.基于MATLAB软件对抽油机连杆运动规律
的仿真研究[J ].机械工程师, 2009(5:99-101.
参考文献:
[1]孙桓,陈作模.机械原理[M ].北京:高等教育出版社,
2006.
平面四杆机构参数化设计及运动仿真研究与实现

・
现代设计与先进制造技术・
陈 剑
葛文杰
王军强 等 平面四杆机构参数化设计及…… 2 3
平 面 四杆 机 构 参 数 化 设 计 及 运 动 仿 真 研 究 与实 现
陈 剑 一葛文 杰 一王 军 强 一张松 飞 ., ,, ,, ,
(. 1西北工业大学 系统集成与工程管理研究所 , 陕西 西安 70 7 ) 10 2 (. 2 西北 工业 大 学 现代设 计 与集 成制造 技 术教育 部 重点 实验 室 , 陕西 西安 7 07 ) 10 2
值积 分方 法 , 连 杆 机 构 的 运 动 规 律 进 行 隐 式 求 对 解, 绘制 了连 杆 运 动 线 图 , 是 基 于 MA A 但 TL B平
台进 行 开发 , 植性 、 成性 、 移 集 交互 性 、 可扩 展性 差 ;
按给定的急 回运动要求设计 、 按预定的两连架杆对 应位 置设 计 、 期 望 函数 设 计 等 【 考 虑 到 曲柄 滑 按 6, 6 J 块机 构设 计 可 以采 用 四杆 机构 设 计 方 法 进 行 变通 设计 , 因此本 文共 考 虑 4 连 杆机 构设计 :1按 急 种 () 回运动要求设计 四杆机构 ( 类 、 I Ⅱ类 ) ( ) ;2 按预 定 的两 连架杆 对 应位 置 设 计 四杆 机 构 ;3 按期 望 () 函数 设 计 四杆 机 构 ;4 按 急 回运 动 要 求设 计 曲柄 ()
平面四杆机构动力学分析
04 平面四杆机构动力学建模
模型假设与简化
刚体假设
假设四杆机构中各杆件均 为刚体,忽略其弹 即无摩擦、无间隙。
平面运动
假设四杆机构在平面内运 动,忽略其空间运动效应。
运动学方程建立
位置分析
加速度分析
通过各杆件的长度和夹角,确定各点 的位置坐标。
对速度表达式再次求导,得到各点的 加速度表达式。
成功构建了适用于平面四杆机构的动力学模型,为相关研究提供了有效的分析工具。
机构运动学和动力学特性的研究
通过对模型进行仿真分析,揭示了平面四杆机构在运动过程中的速度、加速度、力等动力 学特性的变化规律。
机构优化设计的探讨
基于动力学分析结果,提出了针对平面四杆机构的优化设计方法,为工程实践提供了理论 指导。
平面四杆机构动力学分析
目 录
• 引言 • 平面四杆机构概述 • 动力学分析基础 • 平面四杆机构动力学建模 • 平面四杆机构动力学仿真分析 • 平面四杆机构动力学优化设计 • 结论与展望
01 引言
目的和背景
探究平面四杆机构的动力学特性
通过对平面四杆机构进行动力学分析,了解其运动过程中的力、速度和加速度 等特性,为机构设计和优化提供理论依据。
详细介绍平面四杆机构的 动力学建模方法,包括牛 顿-欧拉法、拉格朗日法等 ,并分析各种方法的优缺 点和适用范围。
通过仿真和实验手段对平 面四杆机构的动力学模型 进行验证,确保模型的准 确性和可靠性。同时,展 示仿真和实验结果在机构 设计和优化中的应用。
提出针对平面四杆机构的 动力学性能评价指标,如 运动范围、速度波动、加 速度峰值等,为机构性能 评价提供量化依据。
仿真软件介绍
ADAMS
一款广泛应用的机械系统动力学 仿真软件,可用于建立和分析复 杂机械系统的虚拟样机。
平面连杆机构的可视化运动分析及仿真
The visual motion analysis and simulation of the planar four-shank structure GUAN Wei-juan,CHEN Qing-hua
(Anhui University of Science and Technology,Huainan 232001,China) Abstract:Motion Analysis is an important content of the study of planar four-shank structure, and it is important to structure design. In order to analysis the motion of planar four-shank structure, the analytics method was used to obtain the node’s position, which based on planar four-shank design theory. Firstly, establish the vector equations of the structure, and then obtain the mode of the links’ angular velocity, acceleration and angle. The planar four-shank structure visual motion analysis software was developed with VB program. It is proved that the software is friendly of user interface and versatility, and has the function of four-bar linkage structure interactive design, position motion of key nodes and angle velocity analysis, drawing of acceleration curve and animate simulation, etc, which offer convenient for planar four-shank structure’s analysis and calculation, and improve the design efficiency of four-shank structure. The method and resulting of this paper can also apply to the analysis and simulation of the similar mechanisms. Key words:four-shank structure;motion analysis;simulation;VB
UG NX运动分析实例

运动副5(J005)角速度图:
三
维 设
谢谢观看!
计
三 维
UGNX运动分
设 计
析实例
UGNX运动分析实例
■ 通过UG NX软件,对平面四连杆机构进行三维建模,通过预先给定尺, 之后建立相应的连杆、运动副及运动驱动,对建立的运动模型进行运动 学分析,给出构件上某点的运动轨迹及速度和加速度变化的规律曲线, 用图形和动画来模拟机构的实际运动过程,这是传统的分析方法所不能 比拟的。
分析实例——求解结果分析
■ 经过解算,可对平面四杆机构进行运动仿真显示及其相关的后处理,通过动画可以观察 机构的运动过程,并可以随时暂停、倒退,选择动画中的轨迹选项,可以观察机构的运 动过程,还可以生成指定标记点的位移、速度、加速度等规律曲线。
具体操作如下:
1 如图a所示,在运动导航窗口中右键点击【XY-作图】按钮,选择【新建】,软件会 自动跳出【图表】对话框,如图b所示。选择J002旋转副后,Y轴属性请求选择速度,分量 选择角度幅值,即表示角速度,接着点击【Y轴定义】中的【+】将Y轴分量确定,最后点 击【应用】输出图表,为了方便起见,我们还可以将数据导出至Excel图表格式,如图c和 d所示。
■ 连杆添加具体操作步骤如下:
1 如图a所示,点击功能区上的【连杆】 按钮,弹出新建连杆对话框,如图b所示。
2 选中连杆1,点击【应用】创建连杆L1, 再选中连杆2点击【应用】创建连杆L2,再选 中连杆3点击【应用】创建连杆L3,再选中连 杆4点击【应用】创建连杆L4,最后单击取消 , 创建完成,可以在运动导航窗口模型树下看见 四个连杆,如图c所示。NX 10.0 环境中,系 统会自动识别连杆并创建。
6 点击运动副对话框中的【基本】标签,勾选【啮合连杆】,点击【选择连杆】,并 在视图区选择连杆1,指定连杆1的上端圆心为指定原点,同样选择Z轴正向为指定矢量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平面四杆机构的运动仿真模型分析
1前言
平面四杆机构是是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到广泛应用。
平面四杆机构的运动分析, 就是对机构上某点的位移、轨迹、速度、加速度进行分析, 根据原动件的运动规律, 求解出从动件的运动规律。
平面四杆机构的运动设计方法有很多,传统的有图解法、解析法和实验法。
随着计算机技术的飞速发展,机构设计及运动分析已逐渐脱离传统方法,取而代之的是计算机仿真技术。
本文在UG NX5环境下对平面四杆机构进行草图建模,通过草图中的尺寸约束、几何约束及动画尺寸等功能确定各连杆的尺寸,之后建立相应的连杆、运动副及运动驱动,对建立的运动模型进行运动学分析,给出构件上某点的运动轨迹及其速度和加速度变化规律曲线,文章最后简要分析几个应用于工程的平面四杆机构实例。
2平面四杆机构的建模
问题的提出
平面四杆机构因其承载能力大,可以满足或近似满足很多的运动规律,所以其应用非常广泛,本文以基于曲柄摇杆机构的物料传送机构为例,讨论其建模及运动分析。
如图1所示,ABCD为曲柄摇杆机构,曲柄AB为主动件,机构在运动中要求连杆BC的延伸线上E 点保持近似直线运动,其中直线轨迹为工作行程,圆弧轨迹为回程或空程,从而实现物料传送的功能。
平面四杆机构的建模
由于物料传送机构为曲柄摇杆机构,所以它符合曲柄存在条件。
根据机械原理课程中的应用实例[1],选取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。
在UG NX5的Sketch环境里,创建如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE'为通过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。
现通过草图里的尺寸动画功能,令AB与AD 的夹角从0°到360°变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,其中图3(a)中的E点为水平轨迹的起点,图3(b)中的E点为水平轨迹的中点,图3(c)中的E点为水平轨迹的终点,而图3(d)中的E点为圆弧轨迹(图中未画出)即回程的中点。
如E点轨迹不符合设计要求,则可适当调整各杆件的尺寸,再通过尺寸动画功能检验。
3平面四杆机构运动模型的建立及其分析
运动模型的建立
在UG NX5的Motion环境里,分别建立3个Link(连杆)即AB、BCE和CD以及4个Revolute Joint (旋转运动副),其中J001(即A点)和J004(即D点)为AB杆和CD杆的旋转运动副,而且J001还有一个常数驱动,其初始速度为30°/Sec,如图4所示。
需要指出的是,为了使四杆机构中的E点在后处理中能够生成运动轨迹,需要在E点添加一个关联点(Associate Point),在建立连杆BCE时将该点添加到连杆中,然后选择该点作为运动轨迹(Trace)点,在后处理中将其生成轨迹;同时为了使四杆机构中的E 点在后处理中能够生成运动规律曲线,需要在E点添加一个记号点(Marker),然后在后处理时选择该记
号点作为运动对象(Motion Object)以生成相关的变化规律曲线。
在运动模型建立后,即可对其进行解算。
解算参数设置如下:
解算类型:选择常态运行(Normal Run);
分析类型:选择运动学;
时长(Time):由于AB杆的初始速度为30(度/秒),为了使其能够旋转一周,选择时长为12
(秒),即12秒×30度/秒 =360度;
步数(Step):在速度和时长确定后,步数决定该时段内运动的快慢,这里选择步数为200。
运动分析及后处理
经过解算,即可对平面四杆机构进行运动仿真显示及其相关的后处理。
首先通过动画(Animation)可以观察机构的运动过程,并可随时暂停、回退等,如图5(a)所示为机构运动过程中某一位置。
选择动画中的轨迹(Trace)选项,继续观察机构的运动过程,即可看到E点所形成的运动轨迹,如图5(b)所示。
平面四杆机构的运动仿真显示后,还可生成指定记号点的位移、速度、加速度等规律曲线,如图6、图7和图8所示为指定记号点E点的相关曲线(包括X轴和Y轴的分量)。
4工程实例中的平面四杆机构运动模型
以上所述的平面四杆机构的建模及其运动模型的建立以及运动分析和后处理方法,完全可应用于工程中的平面四杆机构[2],以下仅简要分析其中3例,因篇幅所限不讨论有关规律曲线。
如图9所示为卡车自动卸料机构,该机构为曲柄摇块机构,其中2为车架(机架),摆动油缸3是
绕固定铰链C摆动的摇块,导杆4的一端与活塞固连,A、B、C处为转动副,3与4之间为滑动副(Slider)。
油从油缸下部流入时,推动活塞,使与车斗固连的曲柄1绕固定铰链B转动,从而达到卸料的目的,双点划线位置为卸料的初始位置。
注意这里的两个极限位置是通过UG NX5/Motion后处理中的整体机构轨迹(Trace Entire Mechanism)功能得到的,并非由几何作图获得(下同)。
如图10所示为汽车车门开关机构,该机构为偏置摇杆滑块机构,当摇杆1由动力驱动后绕固定铰链A转动时,带动连杆2(与车门固连)使滑块3沿固定导路4作往复移动,从而实现汽车车门开关的目的,图中双点划线位置为汽车车门开启状态。
这里对滑块3定义了两个运动副,即3与2之间的转动副以及3与4之间的滑动副。
如图11所示为飞机起落架机构,该机构为双摇杆机构,A、D为固定铰链,摇杆1由动力驱动,摇杆3与飞机着陆轮相连,当摇杆1转动时通过连杆2使摇杆3放下或收起,从而实现飞机起落架收放的目的,图中双点划线位置为飞机起落架收起状态。
5结论
通过UG NX5,对平面四杆机构模型进行草图建模,并建立其运动仿真模型,在运动分析后可生成机构上指定点的轨迹曲线,也可输出机构上指定点的位移、速度、加速度等变化规律曲线。
通过机构的简
要分析,证明以上方法完全可应用于工程实例中的各种平面四杆机构。