机械灵巧手设计与控制研究
机械产品创意设计灵巧手

机械产品创意设计灵巧手集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)评分:_________SHANGHAI UNIVERSITY课程论文COURSE PAPER学院机电工程与自动化学院专业机械工程学号学生姓名课程机械产品创意设计研讨课程名:机械产品创意设计研讨HW2:产品创新设计建议书机器人灵巧手的设计张奇负责的部分:1学号电子邮件电话负责的部张明远分:2学号电子邮件com电话牛军负责的部分:3学号电子邮件.com电话易乾川负责的部分:4学号电子邮件电话严俊钦负责的部分:5学号电子邮件电话1、背景随着制造工艺和传感器及控制技术的发展,作为智能制造应用领域中机器人与环境相互作用的重要环节,其末端执行部件已逐渐由原来的简单夹持器向多任务智能多指灵巧手过渡。
智能灵巧手具有多个多关节手指,能够和人手一样具有很高的灵巧性和适应性,执行不同的抓取和操作任务。
因此,智能灵巧手可以使工业机器人在非结构环境中与目标物近距离安全接触,具备对未知目标进行智能操作的能力。
同样,智能仿人型灵巧手对于服务型机器人在特殊环境诸如危险品检测、设备检修、水下作业、空间站物品搬运及装配、残障辅助等领域具有重要应用价值。
灵巧手作业能力的不断提高,其代价是增加了系统的复杂性和研究难度。
目前灵巧手的研究和技术进步主要集中在结构设计、传感系统、运动学和动力学、控制及抓取规划等几方面。
灵巧手技术的发展大概经历了以下四个阶段:(1)早期阶段。
多指手最先是从假肢开始的。
将这些手分为装饰型、被动型、身体驱动型和外部动力型4种。
(2)初期阶段。
从20世纪70年代开始,国际上开始进行机器人多指灵巧手的系统化研究。
1974年日本研制成功的Okada手, 各个手指在结构上细长而单薄,难以实现校大的抓取力和操作力。
它们是初期灵巧手的典型代表。
(3)中期阶段。
Utah/MIT手,是一种仿人的手,其大小、形状、功能都与人手相似,只比人手少一个手指。
仿人灵巧手的结构设计与单指的控制策略

指标 , 两个曲线的形状相似 , 具有严重 的非线性特性 , 试 验结 果表 明 了该 型号转 向器 灵 敏度 特性 的对 称性 为
8 . % , 向力 特 性 的 对 称 性 为 9 . % , 最 大 工 作 18 转 82 其 压 力 为 1. a 转 阀零位 的压 力为 17MP , 的结 30MP , . a 总
G O L-i,G O Bn @n , N a A 学 机电工程学院 , 河南 洛 阳 4 10 ) 7 0 3
摘
要 : 于机 电一 体化 设计 思 想和 最新 的驱动 技 术 , 过分 析人 体 解剖 学 , 对人 类手 掌的 外形结 构 、 基 通 针
参 考文献 :
[ ] 王 晓力 . 1 助力转 向液压 系统的流量 分析与 计算 [ ] 重型 J.
汽 车 ,94,3 :1 4 19 ( ) 2 —2 .
[ ] 张枫念 . 2 动力转 向器转 阀特性设 计模拟修 正 的研究 [ ] J.
轻 型汽 车技术 ,0 9 (0 : 20 , 1 ) 1 4—1 . 8
本体结构、 传感控制 、 信息交互 、 协调 动作 等方面¨ 。 ]
本 文所设 计 的灵 巧手 主要 用 于研究 一种 具有 柔性 抓 取
作者简介 : 高利斌 ( 9 6 ) 男 , 18 一 , 河南焦 作人 , 在读 硕士研 究 生, 主要从事机 电控制技术方 面的研究工作 。
功能适应抓取对象 , 性价 比高的灵巧手 ; 在手型的选择
[ ] 王若平 , 5 蒋军 , 高翔 . 汽车转 阀式液压 动力转 向器性 能分 析与试验 [ ] 农业机械学报 ,0 6 3 ( 1 :6—1 . J. 2 o ,7 1 ) 1 9 [ ] 徐志军. 6 汽车性能与使用 [ . M]北京: 化学工业 出版社 ,00 21 . [ ] 何虹儒 . 7 汽车液压 动力转 向器特 性分析及 检测系统 实现 [ ] 杭州 : D. 浙江大学 ,o 9 2o. [ ] 吴兴敏 , 8 邓万豪. 汽车整 车性能检测 [ . 京 : M]北 国防工 业
机械灵巧手的设计与控制研究

机械灵巧手的设计与控制研究近年来,机器人技术的快速发展使得机械灵巧手的设计与控制研究备受关注。
机械灵巧手是一种模拟人手的机械装置,具备复杂的运动能力和灵活的手抓能力。
本文将从设计和控制两方面探讨机械灵巧手的研究。
一、设计:仿生学的应用在机械灵巧手的设计中,仿生学是一种常见的方法。
仿生学是一门研究生物体结构、功能和行为的学科,将自然界的智慧运用到机器人系统的设计中。
通过对人手结构和运动机理的研究,可以有效地提高机械灵巧手的操作能力。
首先,机械灵巧手的设计需要兼顾结构的轻巧和刚性。
轻巧的结构可以降低机器人自身的负载,提高操作的灵活性;而刚性的结构则可以保证机械灵巧手在运动过程中的稳定性。
为此,研究人员常借鉴人手的骨骼结构,结合轻型材料和刚性材料,设计出既轻巧又刚性的机械结构。
其次,机械灵巧手的设计需要考虑手指的灵活性和精确度。
人手的灵巧性来自于手指关节的灵活度和力学特性的精确控制。
因此,在机械灵巧手的设计中,必须兼顾机械结构的自由度和关节的力学特性。
通过采用柔性材料和可控机构,可以实现机械灵巧手手指的高灵活度和精确控制。
最后,机械灵巧手的设计需要考虑手抓的力度和稳定性。
人手的抓握能力取决于手指间的协调运动和力量调节。
因此,在机械灵巧手的设计中,研究人员通常采用传感器和反馈控制系统,对手抓的力度和力量进行精确控制,以实现稳定的抓取功能。
二、控制:智能控制的应用机械灵巧手的控制是实现其复杂运动和灵活抓握的关键。
传统的控制方法往往只能实现机械灵巧手的简单运动,难以满足复杂任务的需求。
因此,研究人员借鉴人类的智能控制方法,开展智能控制的研究,以提高机械灵巧手的操作能力。
首先,机械灵巧手的控制需要具备感知和决策的能力。
感知是机械灵巧手获取外部信息的能力,决策则是机械灵巧手根据感知信息进行决策的能力。
为了实现这一目标,研究人员采用传感器和图像处理技术,使机械灵巧手能够感知和理解周围环境的特征,进而做出适应性的决策。
(完整版)仿人灵巧手的结构设计毕业设计

仿人灵巧手的结构设计摘要本文介绍了一种五指型仿人灵巧手的的机构设计与实现方法,根据对非规则物品拿取任务的要求,采用转动机构和连杆机构相结合,设计了五指型机器手。
手指弯曲电机与指间平衡电机耦合驱动,实现了机器手的多角度张开、抓握运动方式。
详细分析了机器手手指机构、手掌机构、手指间辅助平衡机构的工作原理,给出了设计方案,并根据总体设计要求选定了关键参数。
通过虚拟样机技术验证了所设计的手指机构传动系统的正确性和自适应抓持的可行性从而为整个仿人手的设计奠定了基础。
关键词:五指型机器手工作原理机构设计虚拟样机The structure designing of and realization of a five-finger arm—and—the demand of fuIfilling the task of of this arm.and—a couple,thus realizing the multi—angle opening and grabbing motion.This thesis gives a detailed analysis on the mechanism of the finger system,the palm system and the aiding finger—balancing system.A design project is also provided,with key parameters according to the general demand.Through virtual prototyping Technology designed to verify the accuracy of finger mechanism and adaptive transmission feasibility of grasping so as to lay the entire design of a —and—;basic theory;mechanism目录1.引言 (1)1.1 研究的背景及其意义 (2)1.2 国内外研究状况 (3)1.3 关键技术 (5)1.3.1 小而强的驱动 (5)1.3.2 丰富的感觉 (6)1.3.3 聪明的大脑 (7)2.仿人灵巧手手指机构的传动方案设计 (8)2.1手指关节的传动方案设计 (8)2.2 仿人灵巧手的整体结构设计 (10)3.手指与手掌结构的设计与制作 (10)3.1 手指关节的设计与制作 (11)3.2 手指关节间连接机构的设计 (13)3.3 手掌的结构设计与制作 (14)3.4 手指基关节的机构设计与制作 (15)4.仿人灵巧手运动学模型 (16)4.1 灵巧手坐标系的建立 (16)4.2 灵巧手正运动学解 (17)4.3 仿人灵巧手动力学模型 (20)5.手指的虚拟样机建立与运动抓持仿真 (21)6.驱动系统的设计 (26)6.1电机的选用 (26)6.2控制系统的选择 (26)1.引言自从40多年前,第一台计算机控制的机械臂出现之日起,人类将机器人概念延伸到了一个新的领域:机器人。
三指灵巧手结构设计与控制实验_(1)
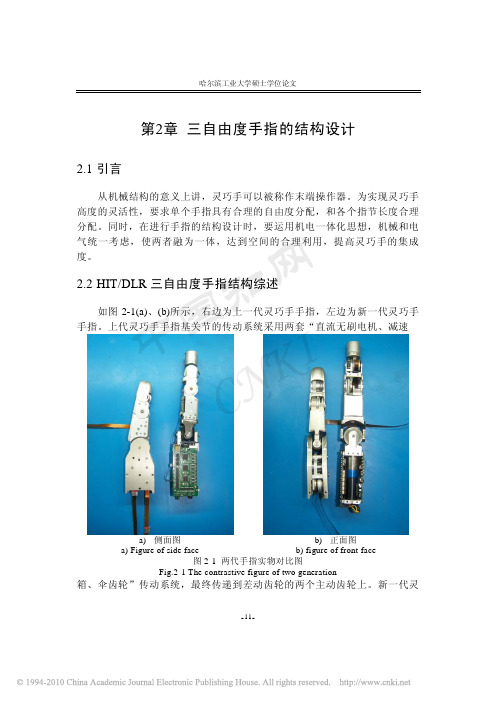
a) 前一代灵巧手指模型尺寸图
b) 本设计灵巧手指模型尺寸图
a) Figure of previous finger model
b) Figure of new finger model
图 2-2 两代灵巧手指模型尺寸对比图
Fig.2-2 The contrastive figure of two generate finger model
扭矩时所受的轴向力、径向力和圆周力,圆周力是驱动基关节转动的动力;
新一代手指三个指节的长度配置是仿照人手指的长度比例 2:1:1,手指总 长度为 106mm,由于指节 1 内要安放指关节 2、3 的驱动器,使指节 1 的长 度较长,手指的主要尺寸参数和上一代手指的对比更接近人手,具体参数见 表 2-1。在结构设计上由于基关节采用新的传动方式,这使基关节的尺寸大 大减小,从而使整个手指的宽度和长度都大大减小,对于灵巧手的包装、结 构设计都提供和很大的方便。
⎡1
⎡θ 1 ⎢⎣θ 2
⎤ ⎥ ⎦
=
⎢⎢⎢−21
⎣2
1⎤
2 1
⎥ ⎥ ⎥
•
⎡θ ⎢⎣θ
1a 2a
⎤ ⎥ ⎦
2⎦
(2-1)
基关节的逆运动学变换方程如式(2-2)
⎡θ1a ⎢⎣θ 2a
⎤ ⎥ ⎦
=
⎡2 ⎢⎣2
− 2⎤
2
⎥ ⎦
•
⎡θ1 ⎢⎣θ 2
⎤ ⎥ ⎦
(2-2)
2.3.2 手指基关节驱动和传动系统
在机器人灵巧手的设计中,驱动的形式主要有电磁(电机)驱动、液气压 驱动和采用记忆合金等。液气压驱动方式的缺点是设备复杂、庞大,难以实 现灵巧手的高度集成化。记忆合金驱动方式存在着疲劳和寿命等问题。现在 在灵巧手的研究中,电机驱动是主要的驱动方式。体积小、输出力大的电机 及集成驱动芯片的采用使电机、驱动电路板与手指机械本体融为一体,实现 灵巧手手指的模块化。本设计中,基关节采用 Maxon 公司提供的两个 EC20
基于套索传动的五指灵巧手设计与主从控制

第32卷第8期中国机械工程V o l .32㊀N o .82021年4月C H I N A M E C HA N I C A LE N G I N E E R I N Gp p.951G959基于套索传动的五指灵巧手设计与主从控制尹㊀猛1,2,3㊀徐志刚1,2㊀赵志亮1,2,4㊀韩㊀伟1,2,41.中国科学院沈阳自动化研究所机器人学国家重点实验室,沈阳,1100162.中国科学院机器人与智能制造创新研究院,沈阳,1100163.中国科学院大学沈阳自动化研究所,沈阳,1100164.东北大学机械工程与自动化学院,沈阳,110819摘要:为了使灵巧手更加轻质化㊁拟人化,设计了一种由舵机经套索驱动的19关节灵巧手.参照人手关节确定灵巧手的构型,通过套索传动实现了关节解耦与驱动后置,并分别对关节机构与驱动集成进行了设计.建立灵巧手多指运动学模型并对其工作空间进行了分析;基于弯曲传感器与主从映射算法实现了抓取的主从跟踪控制.搭建灵巧手样机并进行关节运动实验与抓取控制实验.实验结果表明,将套索传动应用于灵巧手具有可行性,基于主从控制可以实现灵巧手对多种物体的抓取.关键词:套索传动;五指灵巧手;关节机构;工作空间;主从控制中图分类号:T P 242.6D O I :10.3969/j .i s s n .1004 132X.2021.08.009开放科学(资源服务)标识码(O S I D ):D e s i g na n dM a s t e r GS l a v eC o n t r o l o fD e x t e r o u sH a n d sw i t hF i v eF i n ge r s B a s e do nT e n d o n Gs h e a t hT r a n s m i s s i o nY I N M e n g 1,2,3㊀X UZ h i g a n g 1,2㊀Z H A OZ h i l i a n g 1,2,4㊀H A N We i 1,2,41.S t a t eK e y L a b o r a t o r y o fR o b o t i c s ,S h e n y a n g In s t i t u t e o fA u t o m a t i o n ,C h i n e s eA c a d e m y o f S c i e n c e s ,S h e n y a n g,1100162.I n s t i t u t e s f o rR o b o t i c s a n d I n t e l l i g e n tM a n u f a c t u r i n g,C h i n e s eA c a d e m y o f S c i e n c e s ,S h e n y a n g,1100163.S h e n y a n g I n s t i t u t e o fA u t o m a t i o n ,U n i v e r s i t y o fC h i n e s eA c a d e m y o f S c i e n c e s ,S h e n y a n g,1100164.S c h o o l o fM e c h a n i c a l E n g i n e e r i n g a n dA u t o m a t i o n ,N o r t h e a s t e r nU n i v e r s i t y ,S h e n y a n g ,110819A b s t r a c t :I no r d e r t om a k e t h e d e x t e r o u sh a n dm o r e l i g h t a n da n t h r o p o m o r ph i c ,a 19j o i n t sd e x Gt e r o u s h a n dd r i v e nb y s t e e r i n g e n g i n e t h r o u g h t e n d o n Gs h e a t h t r a n s m i s s i o nw a sd e s i g n e d .F i r s t l y ,t h e c o n f i g u r a t i o no f t h e d e x t e r o u s h a n d sw a s d e t e r m i n e db y r e f e r r i n g t o t h eh u m a nh a n d j o i n t s .J o i n t d e Gc o u p l i n g a n dd r i v e p o s t p o s i t i o nw e r e r e a l i z e du s i n gt e n d o n Gs h e a t h t r a n s m i s s i o n .J o i n tm e c h a n i s m s a n d d r i v i n g i n t e g r a t i o n w e r ed e s i g n e ds e p a r a t e l y .T h e n ,a m u l t i Gf i n g e r sk i n e m a t i c m o d e lo fd e x t e r o u s h a n d sw a s e s t a b l i s h e d a n d t h ew o r k s p a c ew a s a n a l y z e d .T h em a s t e r Gs l a v e t r a c k i n g c o n t r o l o f g r a s p i n gw a s r e a l i z e db a s e d o n t h e s e n s o r s a n dm a s t e r Gs l a v em a p p i n g a l g o r i t h m.F i n a l l y ,a p r o t o t y p e o f d e x t e r Go u s h a n dw a s b u i l t ,a n d t h e j o i n tm o t i o ne x p e r i m e n t s a n d g r a s p i n g c o n t r o l e x p e r i m e n t sw e r e c a r r i e d o u t .E x p e r i m e n t a l r e s u l t s s h o wt h e f e a s i b i l i t y o f a p p l y i n gt h e t e n d o n Gs h e a t h t r a n s m i s s i o n t o d e x t e r o u s h a n d s .T h e d e x t e r o u s h a n d sm a yg r a s p a v a r i e t y o f o b je c t s b a s e do nm a s t e r Gs l a v e c o n t r o l .K e y w o r d s :t e n d o n Gs h e a t ht r a n s m i s s i o n ;d e x t e r o u sh a n d w i t hf i v ef i ng e r s ;j o i n t m e ch a ni s m ;w o r k i n g s pa c e ;m a s t e r Gs l a v e c o n t r o l 收稿日期:202004110㊀引言灵巧手与人手功能相似,可以实现类似人手的抓握功能,自问世以来,受到了各研究机构的高度重视[1],尤其是具有高度灵活性的灵巧手已成为机器人研究的热点之一.仿人多指灵巧手可以作为工业领域的末端执行器,也可以作为残疾人的假肢,还可以在太空㊁深海㊁核电站等危险领域代替人手实现精准操作,具有重要的社会应用价值.根据驱动方式的不同,灵巧手可分为电机驱动㊁气动驱动㊁液压驱动和功能材料驱动等,其中159 Copyright©博看网 . All Rights Reserved.电机驱动方式较为常见.S h a d o w手[2]为气动驱动的代表,具有5个手指,有24个自由度,其中20个气动驱动,4个欠驱动.它的驱动来源于一种叫做 空气肌肉 的气动装置,并且将驱动部分集成放置于前臂,手指的运动更像人手.气动空气肌肉价格较低㊁对环境要求低,但刚度和动态特性都较差.S C HU L Z 等[3G4]将液压驱动应用于仿人机械手,研制了可以作为假肢的灵巧手.液压驱动的优点在于驱动力矩大㊁传动效率高㊁反应灵敏,可实现过载保护,稳定性好,但它体积大㊁管线复杂㊁密封性要求高㊁制造维护成本高且易对环境造成污染.功能材料驱动是指采用形状记忆合金㊁电活性聚合物等新型材料来驱动手指关节,目前已采用形状记忆合金驱动的有H i t a c h i手[5]以及E NGG E B E R G等[6]设计的仿人手指.形状记忆合金通过温度改变尺寸长度,变形量难以精确控制,运动精度较差,其可靠性㊁通用性与性价比还有待提高.电机驱动因其具有整体尺寸小㊁噪声低㊁运动稳定㊁易于控制㊁价格适中等优点而广受欢迎.根据电机的安装位置,电机驱动可以分为内置电机驱动与外置电机驱动.D L RGH I T手[7]是内置电机驱动的代表,每根手指具有3个自由度,共有15个自由度.电机与谐波减速器等部件集成于手指内部,其集成度较高,具有较强的操作性和鲁棒性,但结构复杂,后期维护成本较高.类似的灵巧手有美国的B a r r e t t手[8]和日本的G i f u手[9].外置电机驱动多采用连杆传动或柔索传动进行间接驱动.R I C手[10]为外置电机经连杆驱动的代表,所有手指均采用四连杆结构设计,连杆中嵌入有弹性元件来增加机械顺应性,使其运动更加柔顺.它具有4根手指,共有8个关节,只使用一个无刷电机驱动,优点是结构尺寸紧凑以及设计轻量化,但外转子电机与非反向驱动离合器的采用导致其成本较高.R o b o n a u t手[11G12]为外置电机经柔索驱动的代表,整手共有5根手指,共14个自由度.其中拇指㊁食指㊁中指为灵巧指,每根手指具有4个自由度,剩余二指为抓取指,每根手指具有1个自由度.它被应用于国际空间站,旨在代替人们进行外空间操作,其抓取能力可与穿戴航天服手套的人手运动能力相当.其他采用柔索传动的灵巧手包括意大利U B H3手[13]和法国L M S手[14]等.柔索传动[15G16]具有布局灵活㊁高精度㊁轻量化等特点,在灵巧性精密机电装置和伺服机构中应用广泛.但当传动距离较远时,现有的柔索传动机构主要通过传动轮的形式来实现,其布局异常复杂,致使系统的制造和维护成本较高.套索传动[17G19]利用空心套管引导柔索的运动路径,可以克服已有柔索传动机构的缺点,可实现远距离运动与经过运动关节的传递,具有空间适应性强㊁设计成本低等优点,已被运用于仿生灵巧手[20G21]等领域.已有文献多以灵巧手为背景集中研究套索的传动机理与位置补偿,本文主要从结构设计与主从控制方面对套索驱动灵巧手进行相关研究.1㊀五指灵巧手1.1㊀灵巧手构型设计系统的整体方案如图1所示,机械系统由灵巧手和驱动集成组成,系统采用仿生设计,关节布置参照了人手的构型.灵巧手由手掌与五根手指组成,其中食指㊁中指㊁无名指与小拇指分别具有4个自由度,大拇指具有3个自由度,灵巧手共有19个自由度.图1㊀灵巧手整体方案F i g.1㊀T h e o v e r a l l s c h e m e o f t h e d e x t e r o u s h a n d手指安装于手掌上,手掌底部与驱动集成相连.关节采用套索传动的方式实现了驱动与关节的分离,套索两端分别与关节和驱动模块连接,驱动模块集中安装于驱动集成箱中,套索在手掌与手指内走线并留有长度余量以适应运动.1.2㊀关节机构设计手指关节的运动类型可以分为侧摆和屈曲[22],人手的掌指关节为球关节,可以等效为屈曲与侧摆两个关节.根据两个关节的排布可以分为两种方案,手指关节布局如图2所示.图2a所示为G i f u手[9]所采用的手指关节布局,其关节1与关节2的轴线互相垂直,模拟掌指关节,关节3259中国机械工程第32卷第8期2021年4月下半月Copyright©博看网 . All Rights Reserved.和关节4的轴线与关节2平行,分别实现中指关节和远指关节的屈曲.图2b 所示为D L R 手[7]所采用的手指关节布局,与前者不同之处是最底部关节为屈曲关节,关节2为侧摆关节.考虑到套索的传动特点与灵巧手的外观,本灵巧手采用了先侧摆方案的设计.(a)先侧摆方案㊀㊀㊀(b)先屈曲方案图2㊀单手指关节设计F i g .2㊀J o i n t d e s i g no f t h e s i n g l e f i n ge r 以中指为例,其结构如图3所示,近指关节㊁中指关节与远指关节均由单套索驱动,每个关节上均安装有扭簧与电位器.关节处的扭簧一方面为复位运动提供动力,另一方面保持手指关节的初始伸展状态.扭簧的扭矩值主要与扭簧的中径㊁材料的弹性模量㊁圈数㊁受力转角等有关.扭簧的扭矩:M t s =E d 4φ3660D n(1)式中,M t s 为扭簧的扭矩值,N mm ;E 为材料的弹性模量,M P a ;d 为扭簧的线径,mm ;φ为受力转角,(ʎ);D 为扭簧的中径,mm ;n 为扭簧有效圈数.(a)结构示意图㊀(b)结构剖面图图3㊀单手指结构F i g .3㊀S t r u c t u r e o f t h e s i n g l e f i n ge r 扭簧的最大扭矩出现在手指近指关节处,为保证关节能够有效复位,经计算初步选用碳素钢扭簧,有效圈数为3,线径0.5mm .灵巧手在抓取运动过程中,需要位置传感器的反馈信号进行精确操控.设计的灵巧手需要高度的拟人性,故关节空间较小,因此本文采用了体积小㊁质量轻㊁抗干扰能力强的电位式传感器.灵巧手关节设计如图4所示,食指㊁中指㊁无名指与小拇指均包含4个关节,分别为基关节㊁近指关节㊁中指关节与远指关节.大拇指包含3个关节,分别为基关节㊁近指关节与远指关节.其中基关节为侧摆关节,其余关节均为屈曲关节.5个基关节由双套索机构实现传动,为了简化结构㊁减少套索数量,其余关节均由单套索机构实现传动.图4㊀机械臂关节设计F i g .4㊀J o i n t d e s i g no f t h em a n i pu l a t o r 1.3㊀套索传动设计双套索传动机构主要由套管㊁柔索与预紧装置等组成,如图5a 所示,驱动轮安装在舵机输出轴上,从动轮置于关节中.驱动轮上按顺时针与逆时针方向分别缠绕柔索,两根柔索经过挡板b 后再分别经过套管a 与套管b ,然后经挡板a 后固定在从动轮上,这种传动方式被应用于驱动5根手指的5个侧摆关节.双套索的传动过程如下:当驱动轮顺时针转动时,套管a 中的柔索会跟随向右运动,套管b 中的柔索会跟随向左运动,从而带动从动轮顺时针转动;当驱动轮逆时针转动时,套管a 中的柔索会跟随向左运动,套管b 中的柔索会跟随向右运动,从而带动从动轮逆时针转动.当系统处于静止时,套管a 中柔索上的拉力能够抵消从动轮受到的顺时针方向扭矩,套管b 中柔索上的拉力能够抵消从动轮受到的逆时针方向扭矩.359 基于套索传动的五指灵巧手设计与主从控制尹㊀猛㊀徐志刚㊀赵志亮等Copyright©博看网 . All Rights Reserved.㊀㊀单套索传动机构主要由套管㊁柔索与扭簧等组成,如图5b 所示,驱动轮安装在舵机输出轴上,从动轮置于关节中.柔索一端固定在驱动轮上,绕驱动轮缠绕后经挡板进入套管,经过另一挡板后缠绕并固定在从动轮上,从动轮上安装有扭簧,这种传动方式被应用于灵巧手除5个侧摆关节外的其他关节.单套索的传动过程如下:当驱动轮逆时针转动时,套管中的柔索跟随向右运动,从而带动从动轮逆时针转动,同时扭簧被压缩储能;当驱动轮顺时针转动时,套管中的柔索会跟随向左运动,从动轮在扭簧作用下顺时针转动.当系统处于静止时,柔索上的拉力能够抵消从动轮受到的顺时针方向扭矩,扭簧能够抵消从动轮受到的逆时针方向扭矩.(a)双套索传动机构(b)单套索传动机构图5㊀套索传动机构F i g.5㊀M e c h a n i s mo f t e n d o n Gs h e a t h t r a n s m i s s i o n 两种传动机构均安装有螺栓预紧装置,预紧装置可以拉紧柔索来有效减小传动空回.同时,采用编码器与电位器来反馈主动轮与从动轮的角度位置信号,可以实现运动的双闭环控制.套索传动可以实现驱动电机的后置,使多关节串联系统更加轻量化,具有结构简单㊁布局灵活的优点.1.4㊀驱动集成设计驱动集成箱的结构如图6所示,驱动模块由舵机与驱动轮组成,19个关节的驱动模块与预紧装置被分层安装在不同支撑板上,各支撑板通过支撑架连接.支撑板中心加工有通孔,套索通过通孔与手掌后进入手指.通过紧凑型电机的选用与电机位置的优化布局可以减小集成箱的体积.图6㊀驱动集成箱结构F i g .6㊀S t r u c t u r e o f t h e d r i v e r i n t e gr a t i o n 2㊀运动学与工作空间分析多指运动学分析的是灵巧手抓取物体运动与各手指运动之间的关系,根据灵巧手运动学特性建立运动学简化模型,通过工作空间仿真验证设计的合理性.图7㊀食指结构简图F i g .7㊀S t r u c t u r e o f t h e i n d e x f i n ge r 单个手指可以看作是一个多关节串联机器人,以食指为例,各指节长度分别为a 1㊁a 2㊁a 3㊁a 4,基于旋量理论建立手的运动学模型.如图7所示,o 0x 0y 0z 0为基坐标系,其余为动坐标系,各指节长度分别为l 1㊁l 2㊁l 3㊁l 4.灵巧手各关节均可视为铰接,以旋转中心为轴,定义顺时针转动时角度为正㊁逆时针转动时角度为负.关节处于图7所示的初始位置,其指尖坐标系与基坐标系的变换:459 中国机械工程第32卷第8期2021年4月下半月Copyright©博看网 . All Rights Reserved.g st (0)=100L 010000100001éëêêêêêùûúúúúú(2)L =l 1+l 2+l 3+l 4定义各个关节的运动旋量:ξ1=-ω1ˑq 1ω1æèçöø÷=(0,0,0,0,0,1)T(3)ξ2=-ω2ˑq 2ω2æèçöø÷=(l 1,0,0,0,1,0)T(4)ξ3=-ω3ˑq 3ω3æèçöø÷=(l 1+l 2,0,0,0,1,0)T(5)ξ4=-ω4ˑq 4ω4æèçöø÷=(l 1+l 2+l 3,0,0,0,10)T(6)式中,ω1㊁ω2㊁ω3与ω4分别为各关节转动量;q 1㊁q 2㊁q 3与q 4分别为各关节转轴上任意点的坐标.运动方程:g s t (θ)=e ξ^1θ1e ξ^2θ2e ξ^3θ3e ξ^4θ4g st (0)(7)式中,g s t (θ)为运动变换矩阵;θr ㊁ξ^i 分别为关节r 的运动角度与对应的旋量.记c l =c o s θl ,s l =s i n θl ,c l m =c o s (θl +θm ),s l m =s i n (θl +θm ),c l m n =c o s (θl +θm +θn ),s l jn =s i n (θl +θj +θn ),其中l ,m ,n =1,2,3,4.计算得到正运动学方程:g st (θ)=r 11r 12r 13p x r 21r 22r 23p y r 31r 32r 33p z 0001éëêêêêêùûúúúúú(8)式(8)中,位置变量表达式为p =p x p y p z éëêêêùûúúú=(a 4c 234+a 3c 23+a 2c 2+a 1)c 1(a 4c 234+a 3c 23+a 2c 2+a 1)s 1a 4s 234+a 3s 23+a 2s 2éëêêêùûúúú(9)工作空间是评价灵巧手工作能力的重要性能指标,是对指尖工作区域的描述,可以用手指末端到达位置点的集合来描述工作空间.建立灵巧手的坐标系如图8所示,分别在基关节㊁近指关节㊁中指关节㊁远指关节以及指尖处建立坐标系,灵巧手的基坐标设在手掌底部中间位置.基于各个关节的运动范围可以得到灵巧手各指的工作空间,如图9所示.由图9可知,食指㊁中指㊁无名指与小拇指的工作空间与大拇指工作空间均有交集,验证了抓取物体的有效性.其中食指与大拇指工作空间交集最大,中指和无名指与大拇指工作空间交集次之,小拇指与大拇指工作空间交集最小,说明抓取物体时大拇指与食指配合发挥主要作用.由结果可知,灵巧手与人手具有相似的工作空间,末端可以到达设计工作空间的所有点,故构型与尺寸设计合理.图8㊀灵巧手运动学模型F i g.8㊀K i n e m a t i cm o d e l o f t h e d e x t e r o u s h a nd (a)小拇指㊀(b)无名指(c)中指㊀(d)食指图9㊀手指末端工作空间F i g .9㊀W o r k s p a c e s o f t h e f i n ge r s 3㊀主从控制研究本文采用主从控制方法来对五指灵巧手进行控制,在人手上安装弯曲传感器来反馈手指弯曲角度,建立弯曲角度和灵巧手之间的映射关系,并根据此映射关系实现主手对从手的完全控制.采用弯曲传感器[23G24]来反馈手指弯曲度,传感器串联固定电阻,传感器两端电压作为输入信号接入控制器.如图10所示,传感器的两端分别固定在指尖和指根上,手指完全展开时传感器电阻最小,手指最大弯曲时传感器电阻值随着手指的弯曲而增大.为了方便比较不同手指弯曲特征559 基于套索传动的五指灵巧手设计与主从控制尹㊀猛㊀徐志刚㊀赵志亮等Copyright©博看网 . All Rights Reserved.的变化规律,采用线性函数对原始输入进行归一化处理至[0ʎ,90ʎ]范围.具体转换式为yi =90ʎˑx i -x i ,m i nx i ,m a x -x i ,m i n(10)式中,x i 为弯曲传感器两端的测量电压;y i 为线性函数转换后的值;x i ,m a x ㊁x i ,m i n 分别为测量电压采集数据的最大值和最小值;i =1,2, ,5,分别对应大拇指㊁食指㊁中指㊁无名指与小拇指.图10㊀手势捕捉系统F i g .10㊀G e s t u r e c a p t u r e s ys t e m 为了更精确地得到每个弯曲传感器的输出值,考虑到传感器的响应时间特性及实验误差,采用多组实验对式(10)进行标定,标定实验组序号为j ,n 次实验后取平均值作为实验的有效数据.数据的最小及最大值分别如下:x m i n =1n ðnj =1x j ,m i n x m a x=1n ðnj =1x j ,m a x üþýïïïï(11)定义人手弯曲传感器输出值归一化矩阵为Y ,可得人手姿态信息:Y =(y 1,y 2,y 3,y 4,y 5)T (12)单根手指只能反馈一个信号,但手指实际控制需要3个关节角度信号.引入主从映射[25G26]来求解关节角度,这里通过比例系数来得到手指i 的r 关节弯曲角度:θ(r )i =k (r )i y i(13)式中,θ(r )i 为手指i 的r 关节运动角度;k (r )i 为将y i 转化为关节弯曲角度的比例系数;关节标号r =1,2,3分别对应近指关节㊁中指关节与远指关节.为了更好地实现对体积较小物体的抓取,本文采取远指与中指关节先运动㊁近指关节后运动的抓取控制策略.定义y ᶄi 为y i 变化范围内的临界值,通过k(r )i选取不同的值kѳ(r )i与kң(r )i实现抓取过程中的变比例系数控制,kѳ(r )i ㊁kң(r )i分别为小于与大于临界值时选取的系数.当y i ɤy ᶄi 时,近指与中指关节对应的比例系数k ѳ(r )i选值较大,远指关节对应的k ң(r )i选值较小.当y i >yᶄi 时,远指关节对应的k ң(r )i选值增大:k (r )i =k ѳ(r )i ㊀㊀y i ɤy ᶄi k ң(r )i ㊀㊀y i >yᶄi {(14)经过实验选取各手指关节弯曲角度的比例系数的转化系数[k (r )i ]矩阵,通过式(13)即可得到灵巧手人手关节角度[θ(r )i ]矩阵.人手与机器人灵巧手在尺寸上的不一致,会使灵巧手产生运动误差.为了更好地实现对灵巧手的控制,针对主从手尺寸不一致的问题,引入主从手指长度比例关系:θ^(r )i =m i θ(r )i(15)其中,m i 为尺寸比例系数;θ^(r )i为控制器输出用于控制灵巧手关节角度的值.4㊀样机实验4.1㊀样机平台灵巧手样机实验平台如图11所示,灵巧手结构采用尼龙材料3D 打印制作.驱动电机采用L X G16A 串行总线自带减速器的舵机(最大输出扭矩19.5k g c m ),舵机带有温度监测功能,底部可安装散热装置.柔索采用直径为0.5m m 的钢丝绳,套管采用圆形弹簧丝绕成的外径1.2m m ㊁内径0.8m m 的螺旋套管.图11㊀灵巧手实验样机F i g .11㊀E x p e r i m e n t a l p r o t o t y pe of t h e d e x t e r o u s h a n d 灵巧手的控制系统采用N I Gc R I O G9067作为下位机,系统的硬件结构如图12所示.首先在上位机用L a b V I E W 软件编写控制程序,然后通过C A N 接口下载到运行实时系统的下位机执行.手指弯曲信号由F l e x 4.5弯曲传感器测量后输入N I G9205模块,关节角度反馈信号由电位器测量后输入N I G9205模块,运动控制信号由N I G9264模块输出到电机驱动器.弯曲传感器电阻在60~110k Ω间变化,实时反馈与数据监测的频率设置为1k H z .659 中国机械工程第32卷第8期2021年4月下半月Copyright©博看网 . All Rights Reserved.图12㊀样机控制系统F i g .12㊀C o n t r o l s y s t e mo f t h e e x p e r i m e n t a l p r o t o t y pe 4.2㊀灵巧手运动实验为了测试套索驱动灵巧手的性能,通过直接控制舵机对灵巧手的侧摆关节㊁近指关节㊁中指关节和远指关节进行运动实验,如图13所示.由实验可知,所设计的灵巧手具有较好的运动灵活性,套索的应用能够有效避免干涉,实现各关节的解耦独立控制.(a)初始姿态(b)两侧张开(c)单侧摆动(d )近指转动90ʎ(e )中指转动90ʎ(f )远指转动90ʎ图13㊀灵巧手关节运动图F i g .13㊀K i n e m a t i c d i a gr a mo f d e x t e r o u s h a n d j o i n t s 4.3㊀抓取控制实验通过实际测量人手与所控制灵巧手的尺寸,对尺寸比例系数m i 进行标定,结果如表1所示.通过人手五指上安装的弯曲传感器作为输入信号,每根手指均进行了100次伸展弯曲实验,记录传感器反馈电压信号的最大值与最小值,由式(11)求得各手指反馈电压标定的最大值与最小值,结果见表1.灵巧手手指各关节经主从映射算法控制,大拇指与其他手指相比缺少了中指关节,因此将大拇指中指关节所对应的弯曲角度比例系数k (r )i设表1㊀手势识别相关参数T a b .1㊀P a r a m e t e r s o f g e s t u r e r e c o gn i t i o n m ix i ,m a x (V )x i ,m i n (V )大拇指1.523.891.23食指1.544.831.19中指1.494.771.17无名指1.504.621.20小拇指1.454.451.18定为恒值0,其他相关参数初始值均设为1.分别对水瓶㊁苹果与花生进行多次抓取实验(图14),并不断修改相关参数以优化抓取效果,最终参数见表2.实验过程曲线见图15.(a )抓取水瓶动作1(b )抓取水瓶动作2(c)抓取水瓶动作3(d )抓取苹果动作1(e )抓取苹果动作2(f)抓取苹果动作3(g)抓取花生动作1(h )抓取花生动作2(i )抓取花生动作3图14㊀抓取控制实验F i g .14㊀E x p e r i m e n t s o f gr a b c o n t r o l 表2㊀主从映射相关参数T a b .2㊀M a s t e r Gs l a v em a p p i n g re l a t e d p a r a m e t e r s 手指k ѳ(1)k ѳ(2)k ѳ(3)k ң(1)k ң(2)k ң(3)大拇指0.8901.231.1701.25食指0.731.051.201.151.071.21中指0.780.981.171.180.991.18无名指0.630.971.211.130.981.23小拇指0.811.081.181.121.101.20㊀㊀如图15所示,其中0~10s 为抓取水瓶曲线,10~20s 为抓取苹果曲线,20~32s 为抓取花生曲线.由曲线可知,抓取水瓶时,各指关节均有明显运动,其中大拇指与食指各关节弯曲均较小,759 基于套索传动的五指灵巧手设计与主从控制尹㊀猛㊀徐志刚㊀赵志亮等Copyright©博看网 . All Rights Reserved.(a)弯曲传感器信号(b)大拇指关节运动(c)食指关节运动(d)中指关节运动(e)无名指关节运动(f)小拇指关节运动图15㊀抓取实验过程曲线F i g.15㊀C u r v e s o f t h e g r a b e x p e r i m e n t s中指关节弯曲角度较大,各指均发挥抓取作用;抓取苹果时,各指关节也均有明显运动,其中大拇指与食指各关节弯曲均较小,中指与小拇指关节弯曲角度较大,各指均发挥抓取作用;抓取花生时,大拇指与食指各关节弯曲较大,中指㊁无名指与小拇指关节弯曲角度较小,抓取主要由大拇指与食指配合完成.特别地,在20~32s时,y i值小于式(14)定义的临界值yᶄi,与其他图相比,图15b 中的绿色曲线与红色曲线更加接近,图15c中绿色与红色曲线也更加接近且数值明显大于蓝色曲线数值,说明在抓取花生时,大拇指与食指的远指与近指关节相较于其他手指的关节运动更加明显,通过抓取过程的变比例系数控制实现了对体积较小物体的有效抓取.由实验可知,所设计的灵巧手能有效抓取圆柱与圆球等各类物品,通过基于弯曲传感器的主从控制可以实现对五指灵巧手的控制.5㊀结论本文将套索传动应用于灵巧手,提出了一种电机后置的19GD O F拟人轻型灵巧手.参照人手的构型确定了灵巧手的构型,对驱动模块与手指关节进行了设计.建立了灵巧手的多指运动学模型,并对末端运动空间进行了仿真.基于弯曲传感器对主从映射算法进行了研究,实现了抓取的主从跟踪控制.搭建灵巧手样机并进行关节运动实验,验证了所设计灵巧手的运动灵活性.通过抓取实验验证了主从映射控制算法的有效性.实验结果表明,基于套索传动的灵巧手具有可行性,未来可应用于人形机器人以及对灵巧手的灵活性有较高要求的场景,鉴于其成本低的优点,还可以作为科普或者教学工具.齿轮与套索传动的应用使关节控制具有空回迟滞与非线性的特点,主从控制要达到较高的精度也需要非线性补偿,下一步工作将重点对控制算法进行研究.参考文献:[1]㊀R AMÍR E ZR E B O L L O DR,P O N C EP,MO L I N A A.F r o m3F i n g e r st o5F i n g e r sD e x t e r o u s H a n d s[J].A d v a n c e d R o b o t i c s,2017,31(19/20):1051G1070.[2]㊀X U D,L O E BGE,F I S H E LJA.T a c t i l e I d e n t i f i c aGt i o no f O b j e c t s U s i n g B a y e s i a n E x p l o r a t i o n[C]//I E E EI n t e r n a t i o n a l C o n f e r e n c e o nR o b o t i c s a n dA uGt o m a t i o n(I C R A).K a r l s r u h e,2013:3056G3061.[3]㊀S C HU L ZS,P Y L A T I U K C,K A R G O V A,e ta l.P r o g r e s si nt h e D e v e l o p m e n to f A n t h r o p o m o r p h i cF l u i d i c H a n d sf o ra H u m a n o i d R o b o t[C]//I E E E/R A S I n t e r n a t i o n a l C o n f e r e n c e o nH u m a n o i dR o b o t s.S a n t aM o n i c a,2004:566G575.[4]㊀P Y L A T I U K C,S C HU L ZS,K A R G O V A,e ta l.T w o M u l t i a r t i c u l a t e d H y d r a u l i c H a n d P r o s t h e s e s859中国机械工程第32卷第8期2021年4月下半月Copyright©博看网 . All Rights Reserved.[J].A r t i f i c i a lO r g a n s,2004,28(11):980G986.[5]㊀N A N K A N O Y,F U J I E M,HO S A D A Y.H i t a c h i R o b o tH a n d[J].R o b o t i c sA g e,1984,6(7):18G20.[6]㊀E N G E B E R GED,D I L I B A LS,V A T A N IM,e t a l.A n t h r o p o m o r p h i cF i n g e rA n t a g o n i s t i c a l l y A c t u a t e db y S MA P l a t e s[J].B i o i n s p i r a t i o n&B i o m i m e t ic s,2015,10(5):056002.[7]㊀C H E NZ,L I IN Y,W I M B O E C K T,e t a l.E x p e r iGm e n t a lA n a l y s i s o nS p a t i a l a n dC a r t e s i a n I m p e d a n c eC o n t r o l f o r t h eD e x t e r o u sD L R/H I TⅡH a n d[J].I n t e r n a t i o n a lJ o u r n a lo f R o b o t i c s&A u t o m a t i o n,2014,29(1):1G13.[8]㊀T OWN S E N D W.T h eB a r r e t t H a n d G r a s p e r:P r oGg r a mm a b l y F l e x i b l e P a r t H a n d l i n g a n d A s s e m b l y[J].I n d u s t r i a l R o b o t:a n I n t e r n a t i o n a l J o u r n a l,2000,27(3):181G188.[9]㊀K AWA S A K IH,K OMA T S U T,U C H I Y AMA K,e t a l.D e x t e r o u sA n t h r o p o m o r p h i cR o b o tH a n dw i t hD i s t r i b u t e dT a c t i l e S e n s o r:G i f uH a n dⅡ[J].IE E E/A S M ET r a n s a c t i o n so n M e c h a t r o n i c s,1999,7(3):296G303.[10]㊀L E N Z I T,L I P S E YJ,S E N S I N G E RJW.T h eR I CA r m:a S m a l l,A n t h r o p o m o r p h i c T r a n s h u m e r a lP r o s t h e s i s[J].I E E E/A S M E T r a n s a c t i o n s o nM e c h a t r o n i c s,2016,21(6):2660G2671.[11]㊀E N G E L B E R G E R G.N A S A sR o b o n a u t[J].I n d u sGt r i a lR o b o t,2001,28(1):35G42.[12]㊀B R I D GWA T E RLB,I H R K EC A,D I F T L E R M A,e ta l.T h e R o b o n a n t2H a n dGd e s i g n e dt o D oW o r kw i t hT o o l s[C]//I E E EI n t e r n a t i o n a lC o n f e rGe n c e o n R o b o t i c s a n d A u t o m a t i o n.S a i n t P a u l,2012:3425G3430.[13]㊀L O T T IF,T I E Z Z IP,V A S S U R A G.U B H3:I nGv e s t i g a t i n g A l t e r n a t i v eD e s i g nC o n c e p t s f o rR o b o tGi c H a n d s[C]//P r o c e e d i n g s W o r l d A u t o m a t i o nC o n g r e s s.S e v i l l e,2004:135G140.[14]㊀C HA I G N E A U D,A R S I C A U L T M,G A Z E A U J P,e t a l.L M SR o b o t i cH a n dG r a s p a n d M a n i p u l aGt i o n P l a n n i n g(a n I s o m o r p h i c E x o s k e l e t o n A pGp r o a c h)[J].R o b o t i c a,2008,26(2):177G188.[15]㊀鲁亚飞.精密柔索传动机理与设计方法研究[D].长沙:国防科学技术大学,2013.L U Y a f e i.S t u d y o n t h e P r i n c i p l e a n dD e s i g nM e t hGo do f t h eP r e c i s eC a b l eD r i v e[D].C h a n g s h a:N aGt i o n a lU n i v e r s i t y o fD e f e n s eT e c h n o l o g y,2013.[16]㊀韩冬,聂宏,陈金宝,等.腱驱动空间五指灵巧手控制系统研究[J].机器人,2016,38(2):129G134.HA ND o n g,N I E H o n g,C H E NJ i n b a o,e t a l.T h eC o n t r o l S y s t e m o f t h eT e n d o nGd r i v e nS p a c eF i v eGf i ng e r e d D e x t e r o u s H a n d[J].R o b o t,2016,38(2):129G134.[17]㊀WU Q C,WA N G XS,C H E N L,e ta l.T r a n sGm i s s i o n M o d e l a n d C o m p e n s a t i o n C o n t r o l o fD o u b l eGt e n d o nGs h e a t hA c t u a t i o nS y s t e m[J].IE E ET r a n s a c t i o n so nI n d u s t r i a lE l e c t r o n i c s,2015,62(3):1599G1609.[18]㊀Y I N M e n g,WU H a o t i n g,X U Z h i g a n g,e ta l.C o m p l i a n t C o n t r o l o f S i n g l eT e n d o nGs h e a t hA c t u aGt o r sA p p l i e dt oaR o b o t i c M a n i p u l a t o r[J].I E E EA c c e s s,2020,8:37361G37371.[19]㊀WU H a o t i n g,Y I N M e n g,X U Z h i g a n g,e ta l.T r a n s m i s s i o n C h a r a c t e r i s t i c s A n a l y s i sa n d C o mGp e n s a t i o nC o n t r o l o fD o u b l eT e n d o nGs h e a t hD r i v e nM a n i p u l a t o r[J].S e n s o r s,2020,20(5):1301.[20]㊀K A N E K O M,P A E T S C H W,T O L L E H.I n p u tGd e p e n d e n tS t a b i l i t y o fJ o i n t T o r q u e C o n t r o l o fT e n d o nGd r i v e n R o b o t H a n d s[J].I E E E T r a n s a cGt i o n s o nI n d u s t r i a lE l e c t r o n i c s,1992,39(2):96G104.[21]㊀P A L L IG,M E L C H I O R R IC.F r i c t i o nC o m p e n s aGt i o nT e c h n i q u e s f o rT e n d o nGd r i v e nR o b o t i cH a n d s[J].M e c h a t r o n i c s,2014,24(2):108G117.[22]㊀张玉茹,李继婷,李剑峰.机器人灵巧手建模㊁规划与仿真[M].北京:机械工业出版社,2007.Z HA N G Y u r u,L I J i t i n g,L I J i a n f e n g.M o d e l i n g,P l a n n i n g a n dS i m u l a t i o no fD e x t e r o u sR o b o tH a n d[M].B e i j i n g:M e c h a n i c a l I n d u s t r y P r e s s,2007.[23]㊀C HU A N G W C,HWA N G WJ,T A IT M,e t a l.C o n t i n u o u sF i n g e r G e s t u r e R e c o g n i t i o n B a s e do nF l e xS e n s o r s[J].S e n s o r s,2019:19(18):3986.[24]㊀张阳阳,黄英,刘家祥,等.面向手势动作捕捉的传感器设计及主从手运动映射[J].机器人,2019,41(2):156G164.Z HA N G Y a n g y a n g,HU A N G Y i n g,L I U J i aGx i a n g,e t a l.S e n s o rD e s i g n f o rH a n dG e s t u r eC a pGt u r i n g a n d M a s t e rGS l a v e H a n d M o t i o n M a p p i n g[J].R o b o t,2019,41(2):156G164.[25]㊀刘杰,张玉茹,刘博.人手到灵巧手的运动映射实现[J].机器人,2003,25(5):444G451.L I UJ i e,Z HA N GY u r u,L I UB o.M o t i o nM a p p i n go fH u m a n H a n dt oD e x t e r o u sR o b o t i c H a n d s[J].R o b o t,2003,25(5):444G451.[26]㊀F E R R O N E A,MA I T A F,MA I O L O L,e ta l.W e a r a b l e B a n d f o r H a n d G e s t u r e R e c o g n i t i o nB a s e do n S t r a i n S e n s o r s[C]//I E E EI n t e r n a t i o n a lC o n f e r e n c eo nB i o m e d i c a lR o b o t i c sa n dB i o m e c h aGt r o n i c s.P i s c a t a w a y,2016:1319G1322.(编辑㊀王旻玥)作者简介:尹㊀猛,男,1992年生,博士研究生.研究方向为套索传动理论与机器人应用.EGm a i l:y i n m e n g l z@163.c o m.959基于套索传动的五指灵巧手设计与主从控制 尹㊀猛㊀徐志刚㊀赵志亮等Copyright©博看网 . All Rights Reserved.。
模块化磁吸五指灵巧手结构设计与控制研究

模块化磁吸五指灵巧手结构设计与控制研究司成俊(长治职业技术学院机电系,山西长治046000)摘要针对目前五指灵巧手自由度低、拆装繁琐等问题,设计出一种模块化、易拆装、直驱式11自由度五指灵巧手。
通过永磁铁实现手指关节间的快速拆装,每个手指关节至少有±90°转动范围;通过对大拇指转动角度的特殊设计,可实现灵巧手左/右手模式直接切换以及双侧同时抓取。
通过3D打印制作了五指灵巧手样机。
针对灵巧手多传感器造成控制系统复杂的问题,提出采用电流反馈控制算法,通过对电机驱动电流进行信号采集和后处理,建立了电流-转角-指尖力之间的数学模型,并进行了抓取实验。
结果表明,设计的模块化灵巧手具有较强的抓取能力,并且通过电流反馈控制算法,可以实现对灵巧手运动状态和抓取力的控制,完成对目标物抓取操作。
关键词模块化磁吸关节电流反馈算法双侧抓取Study on the Structural Design and Control of Modular MagneticSuction Five-finger Dexterous HandSi Chengjun(Electromechanical Department,Changzhi Vocational and Technical College,Changzhi046000,China)Abstract In order to solve the problems of low freedom of five fingers dexterous hand and complicated disassembly and installation,a modular,easy disassembly and installation,direct drive11degrees of freedom five fingers dexterous hand is designed.Each finger joint has a rotation range of at least±90°.Through the spe‐cial design of the rotation angle of the thumb,the left/right hand mode of the dexterous hand can be directly switched and both sides can be grasped at the same time.A five-finger dexterous hand prototype is made through3D printing.Aiming at the complex control system caused by multiple sensors of the dexterous hand at present,the current feedback control algorithm is proposed,through signal acquisition and post-processing of the motor drive current,the mathematical model of current-rotation angle-fingertip force is established,and the grasping experiment is carried out.The results show that the designed modular dexterous hand has strong grasping ability,and the control algorithm of current feedback can control the movement state and grasping force of the dexterous hand,and complete the target grab operation.Key words Modular Magnetic suction joint Current feedback algorithm Double side grasp0引言灵巧手作为重要的人机交互工具之一,其在工业机器人和服务机器人中占据重要的地位。
空间机器人多自由度灵巧手关键技术

运动学仿真
通过仿真技术对灵巧手的 运动性能进行评估和优化 ,确保其能够实现预期的 操作。
运动学标定
通过实验方法对灵巧手的 运动学参数进行标定,提 高其定位和姿态控制的准 确性。
灵巧手动力学分析
动力学建模
建立灵巧手的动力学模型,描述 手部运动与驱动力之间的关系,
为控制器设计提供基础。
动力学仿真
通过仿真技术对灵巧手的动态性能 进行评估和优化,确保其能够承受 预期的操作负荷。
空间机器人多自由度灵巧手 关键技术
汇报人: 日期:
目录
• 引言 • 空间机器人多自由度灵巧手设计 • 空间机器人多自由度灵巧手控制技术 • 空间机器人多自由度灵巧手感知与感知融
合技术 • 空间机器人多自由度灵巧手实验验证与性
能评估 • 结论与展望
01
引言
研究背景与意义
空间机器人技术的发展需求
随着空间探索和利用的深入,空间机器人技术成为解决复 杂空间任务的重要手段,多自由度灵巧手是空间机器人技 术中的关键部分。
评估内容
包括机械结构、运动学特性、动力学特性、操控精度、感知能力等,以全面评估机器人的 各项性能指标。
优化建议
根据评估结果,提出针对性的优化建议,如改进机械设计、优化运动规划算法、提高感知 能力等,以提高机器人的整体性能。
06
结论与展望
研究成果了高刚度、轻质化和精密化 的设计,提高了灵巧手的稳固性
和精度。
03
感知与识别
通过先进的感知技术和识别算法 ,实现了对物体的精准识别和定
位。
02
驱动与控制
采用了先进的驱动技术和控制策 略,实现了多自由度的精确运动
和协调控制。
04
抓握与操作
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Research on Design and Control of Mechanical Dexterous Hand
YANG Wu-cheng1, MA Xiang-yu1, SONG Wen-xue2
机器人Байду номын сангаас术
Robotics
《自动化技术与应用》 2019 年第 38 卷第 6 期
机械灵巧手设计与控制研究*
杨武成 1, 马翔宇 1, 宋文学 2
(1.西安航空学院机械工程学院 ,陕西 西安 710077; 2.西安航空学院机电技术研究所 ,陕西 西安 710077)
摘 要 : 针对残疾人手指灵活性这一问题,结合人体手指的灵巧性,设计一种机械灵巧手,且对其握持和敲打等特征进行仿真分析; 基于拉格朗日公式求解机械灵巧手的动力学方程,尤其探究关节的动力学模型,鉴于灵巧手的工作需求,采用非线性 PD 和 自适应反馈控制对其控制器设计,且对误差扰动为未知进行仿真分析,结果表明:所设计的自适应控制器能够满足所设计的 工作需求,为仿生辅助医疗机器人设计提供一些参考价值。
Key words:dexterous hand; movement simulation; dynamic model; adaptive control
1 引言
作为机械手与外界互相作用的最后环节,其末端操 作器直接影响机械手的可操作能力及智能化程度。鉴于 单自由度机械手末端自适应能力较差、普及性较低等问 题,机械手灵巧性逐步成为机器人领域的研究热点之一[1]。 灵巧手可视为机械手末端关节的一个自动化装置,可通 过外界环境的感知自主抓取形状不一的物体[2];且通过与 环境的交互,将灵巧手手指的控制分为自由空间控制和 约束空间控制[3]。灵巧手手指关节空间的位置控制具有
文献[7]依据 HIT/DLR II 灵巧手的特性,提出一种 基于关节力矩与非线性补偿的控制方法。韩冬等 以 [8] 适 用于空间在轨服务的腿驱动五指灵巧手为研究对象,设 计具有一定实时性的控制系统。崔敏其等[9]人以 SCARA 机器人为研究对象,求解了其动力学方程。本文针对残 疾人手指灵活性这一问题,结合人体手指特点,设计了一 种仿生灵巧手,并在 UG 软件中进行运动仿真,验证其简 单的握持及敲打功能;进而,基于机器人动力学特性,求 解机械灵巧手单指的动力学方程,且在 MATLAB 软件进
( 1. School of Mechanical Engineering, Xi'an 710077 China;
2. Research Institute of Mechanical and Electrical Technology, Xi'an Aeronautical University, Xi’an 710077 China )
Abstract: Ainaing at the disabled dexterity of disabled individuals, a mechanical dexterous hand is designed. by combining with the dexterity of the human finger. The simulation analysis is done, including the characteristic of gripping and beating. The dynamic model of mechanical dexterous hand is solved, based on Lagrange equation, especially for dexterous finger joint inquiry. The controller of the nonlinear PD and adaptive is resolved to meet the needs of the dexterous hand work. With the unknown of disturbance upper bound, the simulation of the dexterous finger joint is manged, showing that the controller can meet the design requirements and provide some reference value for the design of bionic robot assisted medical.
Techniques of Automation & Applications 93
《自动化技术与应用》 2019 年第 38 卷第 6 期
机器人技术
Robotics
行仿真分析,结果表明:所设计的自适应控制器能够满足 所设计的工作需求,为仿生辅助医疗机器人设计提供一 些参考价值。
2 结构设计与运动仿真
*基金项目:陕西省教育厅科研计划项目(编号 17JK0396);西安航空学 院机电技术研究所科研基金(编号 JDKYJJ2017) 收稿日期:2018-03-12
实时计算量小、算法简单、不会发生机构的奇异现象等优 点而被广泛采用[4]。近年来,为保证灵巧机械手的自适应 能力,诸多控制算法先后被提出,如非线性 PID 控制[5]、神 经网络控制[6]等。
2.1 结构设计
文章设计的医疗机械假手的尺寸参考了人类手指尺 寸的统计数据[10],并且根据实际设计的要求进行了小幅修 改,或者依据设计所要满足的功能需求及适用场合进行 调整。拟采用五指多关节设计,除大拇指以外,其余的四 根手指完全相同,除了拇指外其余四根指头都是由两个 模块组成,近手掌部分为第一模块,远离手掌的部分为第 二模块。第一模块起到一个承前启后的作用,它是连接 手掌和远手模块的重要部分,也是传递和带动第二指节 运动的重要部分,其主要的运动为内屈和外展。手指远 手掌的一端为第二模块,由第一模块的连接片相连,外形 主体也是由一个圆柱体构成,顶部为半球体,下端安装了 两个连接片,设计结构如图 1 所示。