三种包分类算法的实现 SX1116090
简单分类问题的实现
简单分类问题的实现要实现一个简单的分类问题,你可以按照以下步骤进行:步骤1:收集和准备数据首先,收集和准备用于分类的数据。
确保数据集中包含已标记的示例,每个示例都与所需的类别相关联。
这些示例可以是结构化数据(如表格)或非结构化数据(如文本、图像或音频)。
步骤2:选择合适的算法根据数据的性质和问题的要求,选择适合的分类算法。
常见的分类算法包括决策树、逻辑回归、支持向量机(SVM)、朴素贝叶斯和深度学习模型(如卷积神经网络)等。
步骤3:划分数据集将数据集划分为训练集和测试集。
通常,训练集用于训练分类模型,而测试集用于评估模型的性能。
可以使用交叉验证等技术来更好地利用有限的数据。
步骤4:特征工程对数据进行特征工程处理,将原始数据转换为适合分类算法输入的形式。
这可能涉及到特征提取、特征选择、特征缩放等操作。
确保特征表示能够捕捉到数据中的有用信息。
步骤5:训练模型使用训练集对选择的分类算法进行训练。
在训练过程中,模型将学习如何根据特征来预测数据的类别。
调整模型的超参数(如学习率、正则化参数等),以获得更好的性能。
步骤6:评估模型使用测试集对训练好的模型进行评估。
常见的评估指标包括准确率、精确率、召回率、F1值等。
这些指标将帮助你了解模型在不同类别上的表现。
步骤7:调优和改进根据评估结果,对模型进行调优和改进。
可能需要尝试不同的算法、调整超参数或改进特征工程步骤,以提高模型的性能。
步骤8:应用模型一旦模型达到满意的性能水平,就可以将其应用于新的未标记数据进行分类预测。
通过将新数据输入到训练好的模型中,可以得到预测的类别。
以上是一个简单分类问题的实现步骤。
具体实施时,可能会涉及更多细节和技巧,取决于数据的特点和问题的要求。
包分类
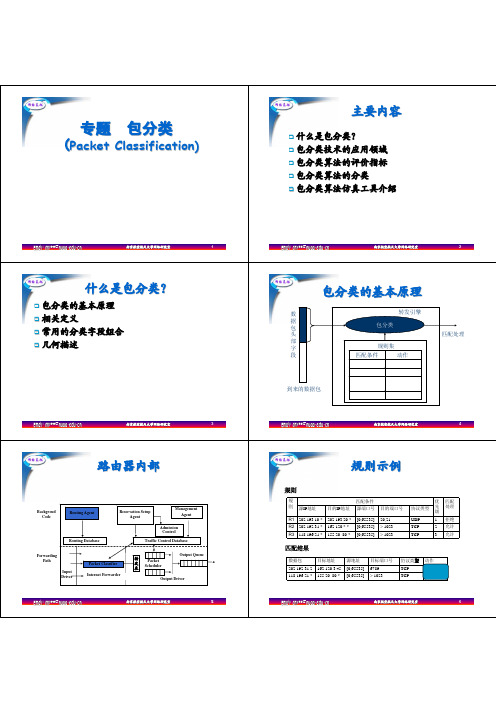
规 则 源IP地址
匹配条件 目的IP地址 源端口号 目的端口号
R1 202.193.10.* 202.193.20.* R2 202.192.31.* 162.120.*.* R3 118.196.21.* 155.20. 80.*
[0,65535] [0,65535] [0,65535]
20,21 > 1023 > 1023
• Rbest是与数据包P匹配的规则 • 在规则库f中不存在其它的规则R,R与P匹配并且满足
Rbest [priority]>R[priority],Rbest是在所有与P匹配的 规则中,优先级最高,代价函数最低的规则
Email: qhy98@
南京航空航天大学网络研究室
9
几何描述
• 与一般的随机存储器RAM相比,价格较高 • 不支持范围匹配 • 集成度较低 • 大功耗,每次操作TCAM均需搜索chip上的所有规则 • 低容量
Email: qhy98@
南京航空航天大学网络研究室
29
Email: qhy98@
南京航空航天大学网络研究室
• R[filter]:d元组(R[F1],R[F2],...,R[Fd]),指示数据 包匹配该规则的条件。Fi表示规则R的第i个匹配域, 是该条规则对数据包头的第i个字段的约束条件。
• R[priority]:规则的优先级,优先级越高,代价越小。 取值范围是[1,+∞),即R[priority]∈[1,+∞)。默认 情况下规则编号表示优先级,编号较小的规则具有较 高的优先级。
南京航空航天大学网络研究室
13
由ISP1所提供的客户服务
E1
E2
路由器Z
路由器Y
背包问题的三种解法代码实现

背包问题的三种解法实验报告实验要求:分别用动态规划法、回溯法、分支限界法解决0/1 背包问题,了解三种算法的算法步骤并上机实现。
实验步骤:1. 建立一个背包问题的解法类Bag.h。
bag_m为动态规划法,bag_b为回溯法,bag_t为分支限界法。
2. 建立一个排序类Sort1.h。
程序的需要对背包的价值比排序。
3. 由分支限界建立一个动态的最大堆及堆的各种操作和运算类SqList.h。
代码实现:1. 主函数:// 背包问题的解法#include <iostream> #include "Bag.h"// 背包问题处理方法类using namespace std;int main() int i,n,M;coutvv"请输入物品个数:";cin>>n;double *m=new double[n+1];double *p=new double[n+1];coutvv"输入每个物品的重量:";for(i=1;i<=n;i++)cin>>m[i];coutvv"输入每个物品的价值:for(i=1;i<=n;i++)cin>>p[i];coutvv"请输入背包的重量:";cin>>M;Bag bag;//创建一个背包问题的解法类对象coutvv"选择背包问题的解法,输入1,动态规划法,输入2,回溯法,输入3,分支限界法。
"vv'\n'vv"请输入1或者2,或者输入3:"<<"";cin>>i;if(i==1)bag.bag_m(m, p,n,M);//调用动态规划法if(i==2)bag.bag_b(m, p,n,M);// 调用回溯法if(i==3)bag.bag_t(m, p,n ,M);//调用分支限界法return 0;2. 排序方法类:(Filename:Sort1.h)// 合并排序类(合并排序)#include <iostream>using namespace std;struct objdouble m;double p;double v;};typedef struct obj OBJ; // 定义物体的数据结构class Sort1public:void merge_sort(OBJ a[],int n)// 以物体的价值比排序int i,s,t=1;while(t<n)s=t;t=2*s;i=0;while(i+t<n)merge(a,i,i+s-1,i+t-1,t);i=i+t;if(i+s<n)merge(a,i,i+s-1,n-1,n-i);void merge(OBJ a[],int p,int q,int r,int n)OBJ *bp=new OBJ[n];int i,j,k;i=p;j=q+1;k=0;while(i<=q&&j<=r)if(a[i].v<=a[j].v)bp[k++]=a[i++];elsebp[k++]=a[j++];if(i==q+1)for(;j<=r;j++)bp[k++]=a[j];elsefor(;i<=q;i++)bp[k++]=a[i];k=0;for(i=p;i<=r;i++)a[i]=bp[k++];delete bp;};3. 背包问题解法类:(Filename:Bag.h)// 背包问题方法类(包含三种方法)//bag_m 动态规划法//bag_b 回溯法//bag_t 分支限界法#include <iostream>using namespace std;#include "Sort1.h"#include "SqList.h"class Bagpublic:void bag_m(double *m,double *p,int n,int M)// 动态规划法int i,j;int *x=new int[n+1];OBJ *objs=new OBJ[n+1];objs[0].p=0;objs[0].v=0;for(i=1;i<=n;i++)objs[i].m=m[i];objs[i].p=p[i];objs[i].v=objs[i].m/objs[i].p;double **optp;optp=new double *[n+1]; for(i=0;i<n+1;i++)optp[i]=new double[M+1]; x[i]=0;for(i=0;i<=n;i++)optp[i][0]=0;for(i=0;i<=M;i++)optp[0][i]=0;for(i=1;i<=n;i++)for(j=1;j<=M;j++)optp[i][j]=optp[i-1][j];elseoptp[i][j]=optp[i-1][j];if(optp[i][j]<(optp[i-1][int(j-objs[i].m)]+objs[i].p)) optp[i][j]=(optp[i-1][int(j-objs[i].m)]+objs[i].p);i=n;j=M;while(i&&j)if(optp[i][j]>optp[i-1][j])x[i]=1;j-=objs[i].m;elsex[i]=0;cout<<" 输出结果,装入为1,不装入为0:"<<'\n'; for(i=1;i<=n;i++)cout<<x[i]<<" ";}cout<<'\n';coutvv"背包物体的总价值最大为:"VVO ptp[n ][M]VV'\n:delete x,objs;for(i=0;i<=n;i++)delete [] optp[i];delete optp;void bag_b(double *m,double *p,int n,int M)// 回溯法int i,j,k;int *x=new int[n+1];int *y=new int[n+2];double m_cur,m_est,p_cur,p_est,p_total;m_cur=0;p_cur=0;p_total=0;OBJ *objs=new OBJ[n+1];objs[0].m=0;objs[0].p=0;objs[0].v=0;for(i=1;i<=n;i++)objs[i].m=m[i];objs[i].p=p[i];objs[i].v=objs[i].m/objs[i].p;y[i]=0;x[i]=0;y[n+1]=0;Sort1 sort;sort.merge_sort(objs,n+1);// 排序k=1;while(k>=1)p_est=p_cur;m_est=m_cur;for(i=k;i<=n;i++)m_est=m_est+objs[i].m;if(m_est<M)p_est=p_est+objs[i].p;elsep_est=p_est+((M-m_est+objs[i].m)/objs[i].m)*objs[i].p;break; if(p_est>p_total)for(i=k;i<=n;i++)if(m_cur+objs[i].m<=M) m_cur+=objs[i].m;p_cur+=objs[i].p;y[i]=1;else {y[i]=0; break;}if(i>=n)if(p_cur>p_total)p_total=p_cur;k=n+1; for(j=1;j<=n;j++)x[j]=y[j];else k=i+1;elsewhile(i>=1&&y[i]==0)if(i<1) break;elsem_cur-=objs[i].m;p_cur-=objs[i].p;y[i]=0;k=i+1;for(i=1;i<=n;i++)cout<<x[i];cout<<'\n';cout<<"total="<<p_total;delete x,y,objs;void bag_t(double *m,double *p,int n,int M)// 分支限界法int i;double t;OBJ *ob=new OBJ[n];for(i=0;i<n;i++)ob[i].m=m[i+1];ob[i].p=p[i+1];ob[i].v=ob[i].m/ob[i].p;Sort1 sort;sort.merge_sort(ob,n);Knapnode kn a,k nax,k nay;//定义左节点和右节点kna.b=0;kna.k=0;kna.p=0;kna.w=0;for(i=0;i<5;i++)kna.s1[i]=0;for(i=kna.k,t=kna.w;i<n;i++)if(t+ob[i].m<=M)t+=ob[i].m;kna.b+=ob[i].p;elsekna.b+=(M-t)*ob[i].p/ob[i].m;break;sqlist q;SqList sq;sq.InitList_Sq(q);sq.insert(q,kna);while(q.length!=0)kna=sq.delete_max(q);if(kna.k==5)}}cout<<"the value is:"<<kna.p<<'\n'; for(i=0;i<5;i++)cout<<kna.s1[i]<<" ";cout<<'\n';break;knay=kna;knay.k++;knay.b=knay.p;for(i=knay.k,t=knay.w;i<n;i++)if(t+ob[i].m<=M)t+=ob[i].m;knay.b+=ob[i].p;elseknay.b+=(M-t)*ob[i].p/ob[i].m;break;sq.insert(q,knay);knax=kna;if(knax.w+ob[knax.k].m>M)continue;knax.s1[knax.k]=1;knax.w+=ob[knax.k].m;knax.p+=ob[knax.k].p;knax.k++;sq.insert(q,knax);};4.动态堆方法类(分支限界方法中用到,Filename:SqList.h)// 动态最大堆#include <iostream>#include "math.h"#include <iomanip>using namespace std;#define ListInitSize 20#define ListIncrement 10const n=5;typedef structint s1[n];int k;float b;float w;float p;}Knapnode;typedef struct sqListKnapnode *elem;int length;int listsize;}sqlist;class SqList/动态堆类public:void InitList_Sq(sqlist &L)//n 为单位元素的大小,初始化堆L.elem=(Knapnode *)malloc(ListInitSize* sizeof(Knapnode));if(L.elem==NULL) exit(OVERFLOW);L.length=0;L.listsize=ListInitSize;void ListI nsert_Sq(sqlist & L,K napn ode elem)/向堆中插入节点Knapnode * newbase;if(L.length>=L.listsize)newbase=(Knapnode*)realloc(L.elem,(L.listsize+ListIncrement)sizeof(Knapnod e))if(newbase==NULL) exit(OVERFLOW);L.elem=newbase;L.listsize+=ListIncrement;L.elem[++L.length]=elem;void sift_up(sqlist &L,int i)// 上移操作while(i>=2)*if(L.elem[i].b>L.elem[i/2].b)swap(L.elem[i/2],L.elem[i]);i/=2;else break;void sift_down(sqlist &L,int i)// 下移操作int done=0;i=2*i;while(done==0&&i<=L.length)if(i+1<=L.length&&L.elem[i+1].b>L.elem[i].b) i++;if(L.elem[i/2].b<L.elem[i].b)swap(L.elem[i/2],L.elem[i]);else done=1;void swap(Knapnode &a,Knapnode &b)Knapnode t;t=a;a=b;b=t;void in sert(sqlist & L,Kna pn ode x)//插入节点后,并排序ListInsert_Sq(L,x);sift_up(L,L.length);Kna pn ode delete_max(sqlist & L)//删除堆中预测价值的最大者Knapnode p;p=L.elem[1];swap(L.elem[1],L.elem[L.length]);L.length--;sift_down(L,1);return p;void print(sqlist &L)// 打印堆的数据int i;};for(i=1;i<=L.length;i++)cout<<L.elem[i].b;运行方法和结果(用这三种算法分别给出实验结果):1. 动态规划法:2. 回溯法:3. 分支限界法。
01背包各种算法代码实现总结(穷举,贪心,动态,递归,回溯,分支限界)

01背包各种算法代码实现总结(穷举,贪⼼,动态,递归,回溯,分⽀限界)2020-05-22所有背包问题实现的例⼦都是下⾯这张图01背包实现之——穷举法:1.我的难点:(1)在⽤穷举法实现代码的时候,我⾃⼰做的时候认为最难的就是怎么将那么多种情况表⽰出来,⼀开开始想⽤for循环进⾏多次嵌套,但是太⿇烦,⽽且还需要不断的进⾏各种标记。
我现在的⽔平实在太菜,然后就在⼀篇中看到⼀个特别巧妙的枚举算法,如下所⽰:int fun(int x[n]){int i;for(i=0;i<n;i++)if(x[i]!=1) {x[i]=1; return;}//从遇到的第⼀位开始,若是0,将其变成1,然后结束for循环,得到⼀种解法else x[i]=0;return;//从第⼀位开始,若是1,将其变成0,然后继续循环,若再循环的时候遇到0,则将其变为1,结束循环。
得到另⼀种解法。
} 虽然我现在也不知道为什么会这样,但是确实是个很好的规律,找到这个规律后,就可以很轻松的⾃⼰写出各种排列情况,以后遇到排列的问题,就⽤这个⽅法。
语⾔不好描述,上图⽚演⽰(是歪的,凑活看吧。
):(2)算法思想:x[i]的值为0/1,即选或者不选w[i]的值表⽰商品i的重量v[i]的值表⽰商品的价值所以这个算法最核⼼的公式就是tw=x[1]*w[1]+x[2]*w[2]+.......+x[n]*w[n]tv=x[1]*w[1]+x[2]*v[2]+......+x[n]*v[n]tv1:⽤于存储当前最优解limit:背包容量如果 tw<limit&&tv>tv1 则可以找到最优解2.代码实现(借鉴)#include<stdio.h>#include<iostream>using namespace std;#define n 4void possible_solution(int x[n]){int i;for(i=0;i<4;i++) //n=4,有2^4-1种解法if(x[i]!=1){x[i]=1;return; //从遇到的第⼀位开始,若是0,将其变成1,然后结束循环,得到⼀种解法}elsex[i]=0;return;//从第⼀位开始,若是1,将其变成0,然后继续循环,若再循环的时候遇到0,则将其变为1,结束循环。
c语言部分背包问题的算法设计

很高兴能为您提供文章撰写服务。
在开始撰写的过程中,我将按照您的要求,以深度和广度兼具的方式来探讨c语言部分背包问题的算法设计。
第一部分:背包问题的概念和分类1. 背包问题是指在给定的一组物品中选择合适的物品装入背包,使得背包的容量最大化或价值最大化的问题。
在算法设计中,背包问题有0-1背包、完全背包、多重背包等不同的分类。
2. 0-1背包问题是指每种物品只能选择一次放入背包,而完全背包问题则是每种物品可以选择多次放入背包。
第二部分:c语言中的背包问题算法设计1. 对于0-1背包问题,可以采用动态规划的方法进行解决。
具体的算法设计包括定义状态转移方程、初始化数组、填表和回溯等步骤。
2. 完全背包问题的算法设计也可以采用动态规划的方法,但在状态转移方程的定义和填表的过程中需要做出相应的调整。
第三部分:c语言中的背包问题算法实现1. 0-1背包问题的算法实现可以通过c语言的数组和循环结构来实现状态转移方程的计算和填表过程。
2. 完全背包问题的算法实现与0-1背包问题类似,但针对每种物品可以选择多次放入背包的特点需要做出相应的改进。
第四部分:个人观点和总结在我看来,c语言部分背包问题的算法设计是一项具有挑战性和实用性的工作。
通过深入理解不同类型的背包问题,并结合动态规划的算法设计和实现,可以有效解决实际生活和工作中的背包优化问题。
掌握c 语言中背包问题的算法设计和实现,不仅可以提升自身的编程能力,也可以为解决实际问题提供有力的支持。
以上是我根据您提供的主题对c语言部分背包问题的算法设计进行的基本介绍和探讨。
希望这些内容能够满足您对文章的要求,如果有其他方面需要补充或修改,还请您及时提出。
期待您的反馈和意见,谢谢!在c语言中,背包问题是一种常见的算法设计问题,涉及到动态规划和数组的运用。
背包问题可以分为0-1背包、完全背包、多重背包等不同类型,每种类型的背包问题都有其特定的算法设计和实现方法。
在本文中,我们将进一步探讨c语言中背包问题的算法设计和实现,并对算法的效率和实际应用进行分析和总结。
《动态规划背包问题》课件

本课件将介绍背包问题,包括动态规划基础知识、背包问题的定义和特点, 以及常见的背包问题类型。我们还会分享解决这些问题的思路和步骤,并通 过实例分析0/1背包问题和完全背包问题。最后,我们将对内容进行总结和展 望。
背包问题介绍
背包问题是一类经典的组合优化问题,它在计算机科学和运筹学中有着广泛 的应用。我们将深入探讨这个问题,并寻找解决方案。
实例分析:完全背包问题
完全背包问题是背包问题中的一个变种,我们将展示如何修改动态规划算法解决这一问题,并分析复杂 度和优化方法。
总结与展望
通过本课件的学习,您已经了解了动态规划背包问题的基本理论和解决方法。 希望这些知识能够帮助您解决更多实际问题,并进一步探索动态规划的更多 应用领域。
动态规划基础知识概述
什么是动态规划
动态规划是一种将问题划分为子问题并求解 的算法思想,常用于求解具有重叠子问题的 优化问题。
动态规划的特点
它利用了子问题的解来构建最优解,避免了 重复计算,提高了效率。
动态规划背包问题的定义和特点
1 背包问题的定义
2 背包问题的特点
背包问题是指在给定的一组物品中,选择 一些物品放入背包,使得物品的总价值最 大(或总重量最小)。
背包问题通常涉及到物品的选择和限定背 包容量,有助于理解动态规划的思想和技 巧。
常见的动态规பைடு நூலகம்背包问题类型
0/1背包问题
每个物品最多选择一次,背 包容量限制。
完全背包问题
每个物品可以选择无限次, 背包容量限制。
多重背包问题
每个物品有限制的选择次数, 背包容量限制。
解决动态规划背包问题的思路和步骤
1
定义状态
包分类算法研究
包分类算法:
穷举分类算法 基于Trie分割算法 几何区域分割算法 元组空间分割算法 维度分解算法
几何区域分割算法
主要思想
– 根据规则代表的区域,对规则集进行分割储存查找时,判断数据 包代表的点落入的子空间范围,逐步收拢得到最佳匹配规则
典型算法
– 智能层次切割(Hierarchical IntelligentCuttings,Hicuts) 算法 – 多决策树(HyperCuts)算法
缺点:
– 回溯时间长,对规则维数的扩展性差,不能直接支持范围匹配
基本分层Trie树
根据下表F1字段建立分层查找树
基本分层Trie树
建立以00*为前序的第二层查找树
基本分层Trie树
建立以0*为前序的第二层查找树
基本分层Trie树
建立以*为前序的第二层查找树
基本分层Trie树
智能层次切割(Hicuts) 算法
主要思想
– Hicuts算法结合了决策树搜索和线性查找两种分类方式,采用多 级空间分解,每级分解在一个维度上进行,把规则库分为各个叶 子结点内的小规则集
– 当一个IP包进来时,沿着树的某一分支遍历到树的叶子,将IP包 和少量的规则线性匹配
优点
– 占用内存空间小,规则集更新容易,直接支持范围匹配
基本元组空间分割算法
说明:
SA:前缀长度 DA:前缀长度 SP:嵌套层数 DP:嵌套层数 PR:确定值为1, 否则为0
剪枝元组空间算法
修剪的元组空间查找算法 (PrunedTupleSpaceSearch),通过在个别字段 上执行查找以得到一个候选元组子集,缩小穷 尽查找的范围
可用任何字段或它们的组合。在源地址和目 的地址上修剪,能够得到候选元组个数和修剪 步数之间的良好的平衡。
资源背包类型动态规划

资源背包类型动态规划资源背包类型动态规划是动态规划中的经典问题,在近几年联赛中经常出现,甚至在NOIP 2006的普及组和提高组中同时出现。
因此如何较好地掌握这一问题的解决方法,提升学生的思维能力,成为了一个值得研究的热点问题。
本文对资源背包类型问题进行了系统的分类,对每个子类的背包问题进行了较深入的算法分析和对比研究,旨在能够深入理解背包问题的内涵。
下面主要讲解三类背包问题,即0-1背包、完全背包、二维背包。
一、0-1背包1.经典的背包问题—0-l背包【例题1】0-1背包【问题描述】在0-1背包问题中,需对容量为C的背包进行装载。
从n个物品中选取装入背包的物品,每件物品i 的重量为wi,价值为vi。
对于可行的背包装载,背包中物品的总重量不能超过背包的容量,最佳装载是指所装入的物品价值最高,即v1×xl+v2×X2+…+Vi×Xi(其1≤i≤n,x取0或1,取1表示选取物品i)取得最大值。
【文件输入】第一行一个数m,为背包容量(整数);第二行一个数n,为物品数量(整数);第三行n个数,以空格分开,为n(1≤n≤10000)个物品的重量;第四行n个数,以空格分开,为n个物品的价值(整数)。
【文件输出】文件输出仅一行为一个数,表示能取得的最大价值。
【样例输入】1162 4 5 6 10 31 7 4 5 11 1【样例输出】12【试题特点】每种物品仅有一件,可以选择放或不放,故称作为0-l背包。
【思路点拨】第一次看到背包类的问题,容易想到贪心策略,但是贪心策略得不到最优解。
从物品上进行贪心,不外乎三个方面:重量、价值和价值/重量,下面一一分析:贪心1:对输入数据,以物品重量排序,越轻的越靠前。
以样例为例,得到如下表所示的排序结果。
以物品重量排序得到的结果(越轻的越靠前)根据排序结果,在剩下的物品中每次选择最轻的装入背包。
背包的容量为11,此时选择物品的编号为①、⑥、②,得到的总价值为9,而输出样例的最大价值为12,这种选择显然不对。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简单实现包分类算法概要包分类是VPNs、下一代路由器、防火墙等设备的关键技术。
包分类算法研究具有十分重要的意义,是目前的热点之一。
本文介绍了常用的包分类算法,分析了它们的优缺点,并简单实现线性、Hicuts 和Hypercut三种基本算法,对这三种算法进行性能对比。
一、包分类算法背景路由器的主要功能是将一个网络的IP数据报(包)Packet转发到另一个网络。
传统路由器仅根据数据包的目的地址对数据包进行转发,提供未加区分的尽力服务(Best Effort Service),这是一维报文分类的典型形式:对所有的用户报文一视同仁的处理。
但是,随着因特网规模的不断扩大和应用技术的进步,越来越多的业务需要对数据包进行快速有效的分类以便区别处理提供不同级别的服务,因此路由器还需要对数据包进行进一步的处理。
最常见的是根据安全性需要,对包进行过滤,阻止有安全隐患的数据包通过。
因此,研究高速包分类算法具有十分重要的意义。
因特网是由许许多多的主机及连接这些主机的网络组成,主机间通过TCP /IP协议交换数据包。
数据包从一个主机穿过网络到达另一个主机,其中就需要路由器提供数据包转发服务。
近年来,因特网己经从主要连接教育机构的低速网络迅速成为重要的商业基础设施。
现在,因特网正呈现两方面的新变化:一方面,因特网上的用户正在呈现爆炸性增长,Web站点正在迅速增加,需要宽带网络的多媒体应用正在日益普及,因特网的通信量也正在呈现爆炸性增长,因特网正日益变得拥挤:另一方面,因特网上的用户正呈现许多不同的种类,从以浏览和下载资料为主的普通家庭用户到经营电子商务的大型企业等等,这些用户从安全、性能、可靠性方面对因特网的期望是不同的。
人们希望路由器能够具有诸如数据包过滤、区分服务、QoS、多播、流量计费等额外功能。
所有这些处理都需要路由器按某些规则将数据包进行分类,分类后的数据构成许多“流’’,再对每一个流分别进行处理。
对于网络流量的不断增长问题,由于光纤技术和DWDM 技术的发展使得链路的速率不再成为瓶颈,已经满足了大流量传输的需求,这就使得路由器的处理速度成为网络整体速度的一个瓶颈。
这主要由于路由器需要对每个输入包执行许多操作,包括十分复杂的分类操作。
例如,它们需要对每个输入包执行最长前缀匹配以发现其下一跳地址:需要对每个输入包执行多维包分类以便在执行缓冲器管理、QoS调度、防火墙、网络地址翻译、多播服务、虚拟专用网、速率限制、流量计费等任务时区别对待不同的包。
因此,为了满足服务快速性和服务多样性这两方面的需要,就必须研究相应的快速包分类算法应用到实际路由中。
二、包分类原理包分类是QoS的基础,只有区分了不同的报文业务,才能进行分别处理及保障相关业务的服务质量。
分类是定义传输类别并判断报文所属传输类别的过程。
TCP/IP报文有两种基本的分类模式,行为聚合(BA)或多字段(MF)。
BA类是区分服务编码点(DSCP)处理的基础,具有较好的扩展性,适用于核心网络。
MF类基于TCP/IP报头一个或多个域(字段),原则上讲所有的字段都可以用于分类。
比如经典的五元组形式(源端口,目的端口,源地址,目的地址,协议类型)。
MF类一般在网络边界实现,是一种广泛使用的灵活的报文分类方法。
高性能的路由器应该支持灵活的分类策略,实现高效的分类算法。
动作通常数据包分类就是根据网络上传输的数据包的包头信息,将数据包按照一定规则进行分类。
在网络分层模型中,要传输的数据被各层协议的包头依次封装,每层的包头都包含若干个域(字段),它们分别表示该层协议的特征数据。
一个分类器又称规则库f,含有n条过滤规则,记为< R1,R2,...,Rn>。
R为其中任意一条规则,由匹配条件filter、优先级priority和匹配处理action三部分构成,记为R[filter],R[priority] 和R [action] :R[filter]:d元组(R[F1],R[F2],...,R[Fd]),指示数据包匹配该规则的条件。
Fi表示规则R的第i个匹配域,是该条规则对数据包头的第i个字段的约束条件。
R[priority]:规则的优先级,优先级越高,代价越小。
取值范围是[1,+∞),即R[priority]∈[1,+∞)。
默认情况下规则编号表示优先级,编号较小的规则具有较高的优先级。
R[action]:对满足相应过滤规则的数据包的处理动作,其取值范围是{a1,a2,a3,...,ak},即R[action]∈{a1, a2, a3,...,ak}。
一般来说k域报文分类匹配分类器设计到的技术也称k维报文分类问题。
k维报文分类问题是通用报文分类问题。
一个数据包的包头经过解析以后得到一个关键字P,P为d元(p1,p2,…,p d),d维包分类问题就是在规则集中寻找和P匹配的具有最高优先级的的规则R best(最佳匹配)。
三、三种包分类算法包分类问题巨大的需求,众多的算法和体系结构已被提出,基本上可以划分为5种类型的算法:穷举分类算法、基于Trie分割的分类算法、几何区域分割的分类算法、元组空间分割分类算法、维度分解分类算法,本文要实现的三种包分类算法:线性包分类算法、Hucuts和Hypercut算法分别属于穷举分类算法和几何区域划分算法。
下文将就着两种类型的算法展开。
穷举分类算法是查找问题最基本而简单的解决方法将待分类的数据包依次和分类规则库内的所有规则进行比较。
讨论这种方法的意义在于,假设规则集已被分成许多子集,每个子集的独立查找往往可以选择该方法。
穷尽查找法中具体两个最常见的算法是线性查找和大规模并行查找。
二者恰好代表穷尽查找法的两种极端,线性查找对规则集不进行分割,其性能最低,而TCAM将规则集划分成每个子集只有一条规则,其性能最高。
线性查找算法按照按优先级降序排列分类规则链表,一个数据包顺序地与每个规则进行比较直到找到第一个匹配的规则。
由于规则已经事先按照优先级降序排列,所以第一个匹配的规则即为最佳匹配规则。
包分类阶段的空间复杂度为O(N),时间复杂度为O(N)。
包分类的时间随着规则数目的增加呈线性增加,适用于规则数目比较少的情况。
几何区域划分算法,主要思想根据规则代表的区域,对规则集进行分割储存查找时,判断数据包代表的点落入的子空间范围,逐步收拢得到最佳匹配规则。
典型算法有:智能层次切割(Hierarchical IntelligentCuttings,Hicuts) 算法和多决策树HyperCuts算法。
HiCuts(Hierarchical Intelligent Cuttings)算法由学者Gupta和Mckeown提出,切割(Cutting)的概念来源于从几何学角度观察包分类问题。
该算法适于范围类型的规则,将其它字段统一转化成范围。
HiCuts采用了一棵决策树作为快速查找的数据结构,其内部结点包含适当的分类导向信息,但不存储任何规则,其叶结点(或外部结点)存储一个小型的规则子集。
算法结合了决策树搜索和线性查找两种分类方式,采用多级空间分解,每级分解在一个维度上进行,把规则库分为各个叶子结点内的小规则集。
当一个IP包进来时,沿着树的某一分支遍历到树的叶子,将该IP包和叶子结点中少量的规则线性匹配。
Hicuts算法的优点是占用内存空间小,规则集更新容易,直接支持范围匹配,缺点是预处理时间较长,分类速度比一些快速包分类算法低。
HyperCuts算法由Singh、Baboescu、Varghese和Wang等学者提出。
HyperCut 以HiCuts算法为基础上,做了一些改进,通过多重切割多维空间,最小化决策树的高度,同样也限制叶结点上规则最大数目。
由于等分切割,HypcrCuts对子空间的编码简单而有效,译码简单,这使得多重切割没有大幅增加数据结构所占用内存。
HyperCuts算法对Hicuts算法的改进,包括:HyperCuts通过增加一个参数,使决策树中间结点可以同时基于多维进行分割。
Hicuts形成的决策树叶子结点上重复的规则较多,HyperCuts通过把一些通用规则(比如通配规则,前缀较短的规则)从分类规则库中独立出来,存放在根结点中。
HyperCuts在叶结点所存储规则列表中仍进行线性查找。
理论上,该算法时间和空间复杂度与HiCuts算法属于同一个数量级。
HyperCuts决策树比HiCuts决策树更低,然而内部结点信息更多,需要位数也更多,这可能增加一个内部结点访问内存的次数,故一次多重切割的维数和份数受存储器位宽限制。
HyperCuts算法也支持增量更新,支持以中等速度进行随机更新,最坏情况下,需要重构决策树.四、算法描述这里只做算法的描述,具体代码见附件包分类根据IP数据的包头字段分类,IP数据包为网络层信息传输的载体,拥有固定长度20字节的首部。
同时IP数据报还封装了上一层的TCP/UDP报文段得的首部,包括源端口、目的端口等信息。
规则库f中的每条规则规则Rule由分类器(filter)、优先级(priority)、动作(action)组成。
分类器可以用经典的五元组表示(目的地址,源地址,协议,目的端口,源端口)即(DA,SA,PR,DP,SP)。
当一条IP数据报进入路由器要经过路由器转发时,数据报会解析出一个关键字P,若P也是由5个字段组成P(d1,d2,d3,d4,d5),那么数据包与规则的匹配问题就是P 的五元组每个分量d跟filter的分量匹配寻找路由器处理动作action的过程。
typedef struct{unsi gned long DA ;unsi gned long SA ;int PR ;unsi gned DP ;unsi gned SP ;}filter , *Filter;线性包分类算法:规则库中的规则用一条单链表的形式组织,按照优先级Rule.priority将单链表非升序排列。
包头解析关键字P在链表中从头结点开始顺序匹配,第一个与之匹配的规则就是最佳匹配。
typedef struct rule{fliter fliters;int priority ;int action ;struct rule *next ;} Rule ;Hicuts算法Hicuts算法结合了决策树搜索和线性查找两种分类方式,采用多级空间分解,每级分解在一个维度上进行,把规则库分为各个叶子结点内的小规则集。
Hicuts 算法构建了一颗决策树,其内部结点包含适当的分类导向信息,但是不包含任何规则,规则都是存储在叶子结点中。
概括地描述d维HiCuts算法如下。
每个内部结点v,代表几何查找空间的一个分区。
例如根结点代表完整的d维空间,根据其中一维可将v个结点空间分割成更小子空间,每个子空间为v结点的每个子结点所表示。