三菱MR-J3-40B伺服放大器应用实例
S7-200系列PLC控制三菱MR-J3伺服的实现

S7-200系列PLC控制三菱MR-J3伺服的实现本文介绍了使用S7-200系列PLC和三菱MR-J3伺服实现XA6132铣床的位置控制。
随着科技的发展和人民生活水平的提高,机床的加工精度和生产效率要求越来越高。
因此,老旧设备需要进行升级改造,以实现精确的位置和速度控制。
铣床的主轴采用普通电机,进给轴采用伺服电机控制。
本文将详细介绍硬件配置和连接方式。
硬件配置方面,本文选用了三菱FR-J3伺服放大器和HF-SP三菱伺服电机作为伺服控制器,具有高响应性、高精度定位、高水平自动调谐等优点。
同时,为了综合考虑性价比和性能,本文选用了性价比高的三菱MR-J3伺服放大器和HF-SP502伺服电机。
在PLC方面,本文选择了西门子S7-200系列的PLC,具有运行速度快、运行稳定、价格较低等优点。
为了实现位置控制,本文采用了集电极开路方式的控制模式,并选择了S7-224XPsi CN XXX型号的PLC。
在人机界面方面,本文选用了MD204LV4文本显示器作为小型人机界面,能够跟S7-200系列PLC通讯并且价格便宜。
硬件连接方面,本文详细介绍了主电路的连接方式。
伺服的脉冲输入端输入24V低电平的脉冲,因此,本文选择了24V低电平输出、具有速度控制、位置控制、占空比控制的PLC。
通过这些硬件的连接,可以实现铣床的精确位置和速度控制。
总之,本文介绍了使用S7-200系列PLC和三菱MR-J3伺服实现铣床位置控制的方法,详细介绍了硬件配置和连接方式。
这些方法可以帮助老旧设备进行升级改造,提高机床的加工精度和生产效率。
本文介绍了铣床控制系统中主轴电机、伺服轴和PLC的电路连接、通讯线的选择以及参数设置和PLC程序设计。
主轴电机采用普通电机,通过接触器进行控制,离合器控制主轴的抱紧与松开,用于换刀时将主轴抱紧。
伺服轴采用伺服控制,24伏电源给PLC、伺服、离合器及文本显示器提供电源,其中文本显示器和PLC共用一个24伏电源。
三菱电机 MELSERVO-J3系列直线伺服放大器 电机 说明书

最大速度 2m/s
持续(额定)推力 50N 75N 100N 150N 225N
L M-U 2 S A 0-2 4 0-□ ( 次级侧: 磁体)
符号 A B
宽度 ( 标称尺寸) 62mm 82mm
符号 240 300 420
长度 ( 标称尺寸) 240mm 300mm 420mm
LM-U2(大推力)系列 LM-U2P2B -4 0 □-□ ( 初级侧: 线圈)
LM-H2P3C-72M-1SS0
MR-J3-350B-RJ004U507
LM-H2P3D-96M-1SS0
MR-J3-500B-RJ004U508
LM-FP2B-06M-1SS0
MR-J3-200B-RJ004U518 (用于自冷型) MR-J3-200B-RJ004U519 (用于液冷型)
LM-FP2D-12M-1SS0 LM-FS20-480-1SS0, LM-FS20-576-1SS0
5 可用于对生态环境友好的清洁场合
清洁程度
等级7 等级6 等级5 等级4
[ 测量结果超过了限制值] 滚珠丝杠 驱动系统 直线伺服系统
0
0.5
1.0
1.5
2.0
速度(m/s)
可用于清洁的环境中。由于取消了滚珠 丝杠传动机构,因此不存在来自润滑油 (脂)污染的问题。
采用了直接驱动,消除了传动装置中的 间隙,因此即使在高速中也能安静平滑 的运行。
LM-F系列
LM-FP4D-24M-1SS0 LM-FP4F-36M-1SS0
LM-FS40-480-1SS0, LM-FS40-576-1SS0
MR-J3-700B-RJ004U526 (用于自冷型) MR-J3-700B-RJ004U527 (用于液冷型) MR-J3-11KB-RJ004U528 (用于自冷型) MR-J3-11KB-RJ004U529 (用于液冷型)
MR-J3-A系列伺服放大器培训教程

交流伺服进阶课程
—MR-J3-A系列伺服放大器
1
AC
————
AC
——
AC
————
2
1.1 AC
AC AC
3
1.2.1
4
1.2.1 总 c
5
C件速/C般三
C件速/C般三=fc1/fc=例f0*近/fc*60
例c
pulse
fc
pps
例c1
pulse
fc1
例f
pulse
lo
mm/pulse
例f0
pulse/rev lc
mm/pulse
49
例c0
pulse/rev C件速
6.42
1
131072p/r 200khz
20000 mm/min
/
回
400 mm
t总
0.157 s
t0
1.5 s
tf
2.3 s
31
4.1 AC
32
4.1 AC
33
4.3
34
4.4
?
例A01 例C01 例C02 例C03 例C05~例C11 例C37 例C12
1.2.1
1 2)
0.4kw 0.4kw 11kw
3
11kw
d
分代B配 e
6
1.2.2
•
瞬时运转区域 连续运转区域
7
1.2.2
•
8
1.3.1
•
位置环
电流环
9 速度环
1.3.1
齿=配/密
MR-J3-T调试总结

MR-J3-TT伺服电机调试总结1、伺服基本参数设定1)驱动器站号设置:如下图拨动驱动器上站号拨码开关,给其分配正确的站号:2)通讯波特率设置:如下图拨动开关进行设置,项目采用2档。
3)驱动器所占站数设置:项目伺服采用两站,将SW1拨到右侧。
4)通过SETUP221E通过软件,对驱动器进行参数设定,需设定参数如下:基本设定参数PA:PA01指令系统选择:0.绝对指令系统1.增量指令系统,选择0;PA03位置检测系统选择:0.不使用1.使用绝对位置检测系统,选择1;PA04 AOP1,选择1;PA05进给范围及凸轮发生器比率选择,根据机械手行程调节;PA06,PA07电子齿轮,PA06为分子,PA07为分母,PA06/PA07的范围为1/10到2000,如下图,主要通过电子齿轮调节机械位移与电机位移一致,方便程序数据的写入。
PA08 增益调整模式选择;PA09 自动调整的反应时间,当机械结构齿轮噪音较大时,减小该设定值;PA10 设定RXn1(位置到达)和RXnC(移动完毕)信号输出的范围,在定位精度要求高的场合,减小该设定值;PA11 正转力矩限制,为最大力矩的百分比,根据机械设计者要求减小;PA12 反转力矩限制,为最大力矩的百分比,根据机械设计者要求减小;PA14 电机旋转方向选择;PB 增益/滤波参数(参数暂都不考虑修改)PC 扩展设置参数PC02 原点回归方式选择,选择2;PC03 原点回归方向选择PC04 原点回归速度选择PC05 滑行速度选择,探测到近点狗信号后滑行速度PC07原点回归位置值的设定PC11 粗略范围设定,影响RXn2(rough match)PC12 JOG速度设定PC31-32 软件正极限PC33-34 软件负极限PD 扩展设置参数PD01 调试时可以强制一些信号ONPD03 自动/手动选择PD04 Point Table选择PD06 输入信号选择(CN6-2),默认值002B PD07 输入信号选择(CN6-3),默认值000APD08 输入信号选择(CN6-4),默认值000BPD09输出信号选择(CN6-14),默认值0002 PD10输出信号选择(CN6-15),默认值0003 PD11输出信号选择(CN6-16),默认值0024 PD12 需修改PD14需修改PD242、伺服基本运动功能1)原点回归(OPR):具体方式有如下:0: Dog type1: Count type2: Data setting type3: Stopper type4: Home position ignorance (Servo-on position as home position) 5: Dog type rear end reference6: Count type front end reference7: Dog cradle type8: Dog type first Z-phase reference9: Dog type front end referenceA: Dogless Z-phase reference选择方式对应参数为PC02,根据设定值不同选择不同的原点回归方式,设置原点回归方向参数为PC03,设置近点狗信号极性为PD16。
三菱MR-JE-B系列伺服放大器的功能

三菱MR-JE-B系列伺服放大器的功能[模型适用控制]实现了接近理想模型的高响应、稳定控制。
2自由度型模型适用控制,可以单独设定对指令的响应和对外部干扰的响应。
并且,可以将该功能设为无效。
[位置控制模式] 该伺服放大器作为位置控制伺服使用。
[速度控制模式] 该伺服放大器作为速度控制伺服使用。
[转矩控制模式] 该伺服放大器作为转矩控制伺服使用。
[高分辨率编码器]MELSERVO-JE系列支持的旋转式伺服电机的编码器使用的是131072pulses/rev高分辨率编码器。
[绝对位置检测系统]只需进行一次原点设定,此后无需每次接通电源时都进行原点复位操作。
[增益切换功能] 不仅可以切换旋转中和停止时的增益,还可以在运行中使用输入软元件进行增益的切换。
[高级振动抑制控制Ⅱ] 抑制机械臂部前端的振动或残留振动的功能。
[机械共振控制滤波器] 通过降低特定频率的增益来抑制机械系统共振的滤波器功能(陷波滤波器)。
[轴共振控制滤波器]伺服电机加载负载时,由于伺服电机驱动时轴转动产生的共振,可能会发生高频率的机械振动。
轴共振抑制滤波器是抑制该振动的滤波器。
[自适应性滤波器Ⅱ] 检测出伺服放大器的机械共振后自动设定滤波器特性,抑制机械振动的功能。
[低通滤波器] 提高伺服系统的响应性,会对高频率共振有抑制效果。
[机械分析功能]仅通过连接安装有MR Configurator2的计算机与伺服放大器,就可以分析机械的频率特性。
使用该功能时,需要MR Configurator2。
[鲁棒滤波器] 当因辊轮进给轴等负载惯量较大而不能提高响应性时,可以提高对干扰的响应。
[微振动抑制控制] 在伺服电机停止时,抑制±1脉冲的振动。
[自动调谐] 即使加载在伺服电机轴上的负载变化,也能将伺服放大器的增益自动调整到最佳。
[再生选件] 在因发生的再生功率较大,而伺服放大器的内置再生电阻器的再生能力不足时使用。
[报警历史清除] 清除报警历史。
三菱MR-JE-B伺服手册

三菱 通用 AC伺服SSCNETⅢ/H接口型号MR-JE-_B伺服放大器技术资料集使用前请务必阅读。
在安装、运行、维护及检查前,请务必熟读本技术资料集、使用手册及相关资料,以便正确使用。
请在熟读机器的相关知识、安全信息及注意事项的所有内容后进行使用。
本技术资料集中,分为“危险”与“注意”两类安全注意事项。
危险 操作错误时,可能引起危险,造成死亡或重伤。
注意 操作错误时,可能引起危险,造成中度伤害、轻度伤害或财产损失。
此外,即使注意事项中记载的内容,有时也有造成严重后果的可能性。
两者所记均为重要内容,请务必遵守。
禁止及强制图表的表示内容如下所示。
表示禁止(严禁采取的行为)。
比如“严禁烟火”为。
表示强制(必须采取的行为)。
比如需要接地为。
在本技术资料集中,对不会造成财产损失的注意事项及其它功能等的注意事项作为“要点”进行区分。
仔细阅读本手册后请妥善保管,以便使用者可以随时取阅。
1.防止触电危险因为有触电的危险,所以请在关闭电源并经过15分钟以上,请确认充电指示灯熄灭后再进行接线作业或检查。
而且,确认充电指示灯是否熄灭时,请务必在伺服放大器的正面进行。
伺服放大器及伺服电机必须确保接地良好。
接线作业或检查应由专业技术人员进行。
伺服放大器及伺服电机请在安装后再接线。
否则会造成触电。
请勿用湿手操作开关。
否则会造成触电。
请勿损伤电缆、对其施加过大应力、在其上放置重物或挤压等。
否则会造成触电。
为了防止触电,请务必将伺服放大器的保护接地(PE)端子(带有符号的端子)连接到控制柜的保护接地(PE)上。
使用漏电断路器(RCD)时,请选用B型。
为避免触电,请在电源端子的连接部进行绝缘处理。
2.防止火灾注意请将伺服放大器、伺服电机、再生电阻安装在不可燃物上。
直接安装在可燃物上或安装在靠近可燃物的地方,可能会造成冒烟及火灾。
在电源和伺服放大器的电源(L1・L2・L3)间请务必连接电磁接触器,在伺服放大器的电源侧形成可以切断电源的结构。
三菱伺服MR-MR-E-A伺服放大器使用手册

MR-E- A
环境 周围 温度 周围 湿度 空气 标高
振动
运行 保存 运行 保存
条件
伺服放大器
伺服电机
0℃~+55℃(无冰冻)
0℃~+40℃(无冰冻)
-20℃~+65℃(无冰冻) -15℃~+70℃(无冰冻)
AC230V
项目 电源
伺服放大器 MR-E-□
电压/频率
允许电压波动
允许频率波动 方式 动力断路器 保护功能
位置 控制 模式
速度 控制 模式 构造 环境
最大输入脉冲 频率 指令脉冲频率 (电子齿轮) 定位结束宽度 设置 误差过大 转矩限制 速度控制范围 速度波动率
转矩限制
13.1.1 项 No16 参数 No20 参数 No21 参数 No43~47 参 数 3.4.1 项(5) No28 参数 6.2 节 6.6 节
6.7 节
6.8 节 No17 参数 13.1.4 项 10.2.1 项
伺服放大器
MR-E-10A MR-E-20A MR-E-40A MR-E-70A MR-E-100A MR-E-2000A
LZ
LZ
LZ
20
O
LZR
LZR
LZR
21
O
OP
OP
OP
22
I
PG PG/-
23
I
PP PP/-
24
I
NG NG/-
25
I
NP NP/-
26
注 1.I:输入信号,O:输出信号 2.P:位置控制模式,S:速度控制模式,P/S:位置/速度控制切换模式
简称
SON LSP LSN CR SP1 SP2 PC ST1 ST2 TL RES EMG LOP PP NP PG NG TLC VLC
三菱电机MR-J4全闭环控制的连接
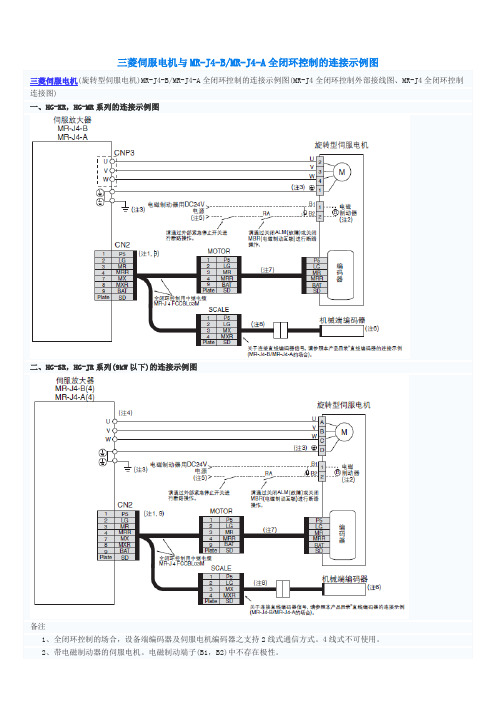
三菱伺服电机(旋转型伺服电机)MR-J4-B/MR-J4-A全闭环控制的连接示例图(MR-J4全闭环控制外部接线图、MR-J4全闭环控制连接图)
一、HG-KR,HG-MR系列的连接示例图
二、HG-SR,HG-JR系列(9kW以下)的连接示例图
5、不可将接口用DC24V电源兼用作电磁制动器用电源,请务必为其配置专用品。
6、关于直线编码器,请参照MR-J4伺服驱动&电机用户手册目录中目录的3.直线电机“直线编码器一览”。
有关使用旋转编码器的全闭环功能,请参照各伺服放大器技术资料集。7、三菱提供Fra bibliotek套的编码器电缆。
8、根据设备端编码器不同,所需编码器电缆也各不相同,请参照各技术资料集。
五、HG-RR、HG-UR系列的连接示例图
备注
1、在全闭环控制下,设备端编码器以及伺服电机编码器仅支持2线式的通信方式。无法使用4线式。
2、带电磁制动器的伺服电机。电磁制动端子(B1,B2)中不存在极性。HG-UR202B~HG-UR502B的电磁制动器接头与伺服电
机电源接头不同。此外,根据伺服电机容量的不同,引脚编号也有所不同。
有关使用旋转编码器的全闭环控制的详细信息,请参考各伺服电机的技术资料集。
6、三菱提供配套的编码器电缆。
7、根据设备端编码器的不同,所需要的编码器电缆也有所不同,请参考各技术资料集。
8、请组合使用外设动态制动(选件)。如果不连接外设动态制动,则在紧急停止时伺服电机
不会停止而是进入到自由运行状态从而导致碰撞事故。
2、带电磁制动器的伺服电机。电磁制动端子(B1,B2)中不存在极性。
3、请通过控制柜的保护接地(PE)端子,转接伺服放大器的保护接地(PE)端子进行接地。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三菱MR-J3-40B伺服放大器应用实例
本人设计一套空间曲线自动焊接设备时用到了三菱MR-J3-40B伺服放大器,现将设计与使用心德与大家分享如下。
本空间曲线焊接设备控制系统包括三菱Q系列CPU、输入模块、输出模块、QD75MH4定位模块、人机界面和3个MR-J3-40B伺服放大器及电机。
三菱MR-J3-40B伺服放大器使用主要包括电气接线、外围开关设定和参数程序设定调试等三部分。
1 电气接线
三菱MR-J3-40B伺服放大器及电机电气连接图如图1所示。
图1 MR-J3-40B伺服放大器及电机电气连接图三个伺服放大器主电路为AC220V供电,控制电路用SSCNETIII光纤通信总线电缆菊花型连接。
通过SSCNETIII电缆可以最大限度地节省配线,两站之间的最大连接距离可达50米。
MR-J3-40B伺服放大器与HF-KP43伺服电机之间接线
如图2所示,伺服电机HF-KP43
与伺服放大器MR-J3-40B编码器接口针脚号及接线方式如图3所示。
图2 伺服与电机之间动力线接线图
图3 伺服与电机之间编码器接线图
根据上述方法连接好伺服放大器及电机的线缆后伺服放大器如图4所示。
图4 接好线后的伺服放大器
2 外围开关设置
MR-J3-40B伺服放大器外围开关设定:正常运行时,拔码开关SW2均需拔在Down。
根据伺服放大器所处位置及位置模块的定义,SW1选择伺服放大器所对应的轴:SW1=0时对应第一轴,SW1=1时对应第二轴,以此类推,SW1=15时对应第十六轴。
本实例中回转伺服SW1=0,升降伺服SW1=1,伸缩伺服SW1=2。
如图5所示。
本系统采用绝对位置定位,所以伺服放大器需配绝对位置记忆的电池,伺服放大器的CN4接口接电池,电池如图6所示。
图5 伺服放大器外围开关
图6 MR-J3-40B伺服放大器绝对位置记忆电池
3 参数程序设定调试
伺服放大器外围接线完成并外围开关设定好之后,就可以接通伺服放大器电源,点亮伺服放大器,此时有两种方法可以设定伺服放大的的参数,一种是通过CN5口用电脑将设定好的参数下载到伺服放大器中,另一种方式是在GX-Works2中的通过编程的方式进行参数设定后下载到Q系列PLC中,再通过QD75MH4模块的SSCNETIII光纤通信总线控制伺服放大器。
本例是采用后一种方式。
参数部分设定画面及部分程序如图7、8、9、10所示。
图7 参数设定画面
图8 伺服参数设定画面
图9 轴定位数据设定画面
图10 部分程序梯形图
将GX-Works2中编好的程序下载到Q系列PLC中,然后调试程序及动作,调试心德总结如下:
1、MR-J3-40B伺服放大器内部主要分为整流模块和控制模块,整流模块可以通
过万用表量通断的方法判断是否有损坏或故障,具体方法如下:用指针万用表量P、N分别对电源输入的L1、L2、L3和电源输出的U、V、W的阻值(如
没有指针万用表也可以用数字万用表代替),P黑表笔对U、V、W红表笔的电阻约445
Ω,P黑表笔对L1、L2、L3红表笔的电阻值无限大,N红表笔对U、V、W黑表笔的电阻值约445Ω,N红表笔对L1、L2、L3黑表笔的电阻值约530Ω)。
2、定位模块QD75MH4、伺服放大器MR-J3-40B、伺服电机HF-KP43连接好通电
后,伺服电机不能正常转矩保持,用手旋转电机轴,电机轴会来回振动,此时,首先检查伺服电机与伺服驱动器之间的U、V、W接线是否完全正确,再检查编码器接线,如果都没有问题,可以通过增大伺服参数中自动调谐响应性的值来增大保持转矩。
3、HF-KP43伺服电机在与伺服驱动器连接时或得电一段时间断电后,手动旋转
电机轴会感觉有点发卡,长时间断电后会恢复正常,所以一般情况下不要判断为伺服电机有问题。
4、MR-J3-40B伺服放大器用绝对位置定位第一次接通电源,会报绝对位置丢失
(25)错误,报警可以通过切断电源并再次接通电源而解除,报警解除后再次设定原点位置。
5、将地址1-600的运行模式改为轨迹,实现1-600-1-600…的循环,循环过程
中实时改变1-600定位地址中的值,以满足绝对定位时多圈焊接,但注意定位地址值有一固定范围,不能超过。
6、可以通过参数中每转的移动量来调试电机转一转机械执行机构运行的距离。
7、可以通过GX-Works2中工具→智能功能模块用工具→QD75型定位模块中的
定位监视及定位测试进行伺服测试和运行监视(调试过程中,用定位数据定位时,600个地址中有两个定位方式选错,运行时总是出现异常反转,检测程序及参数没有发现错误,如此折腾了两天,后来通过定位监视中看出有两个定位方式错选为增量方式)。
系统一些相关图片如下:
PLC系统
三个MR-J3-40B伺服放大器
HF-KP43伺服电机
HF-KP43B带制动伺服电机
三个伺服电机
系统调试中
系统电控箱如有侵权请联系告知删除,感谢你们的配合!。