三菱伺服增益调整方法及参数设置_V2
三菱数控伺服驱动参数设定与调整
机械与设备Machine &Equipment1引言数控机床伺服驱动参数调整的好坏,直接影响到机床的加工精度和性能。
很多数控机床在出厂前,都进行过伺服驱动参数基本设定,能满足一般精度的加工要求。
但在动态性能要求高的模具加工中,由于伺服驱动参数没有进行最佳调整,造成电气系统与机械特性匹配不合理,导致加工中出现质量问题。
例如,铣球面光洁度差、加工圆弧呈椭圆、加工面在象限切换处出现刀痕等等。
根据三菱数控系统的特点,笔者总结了伺服驱动参数调整要领及伺服驱动参数设定与调整方法。
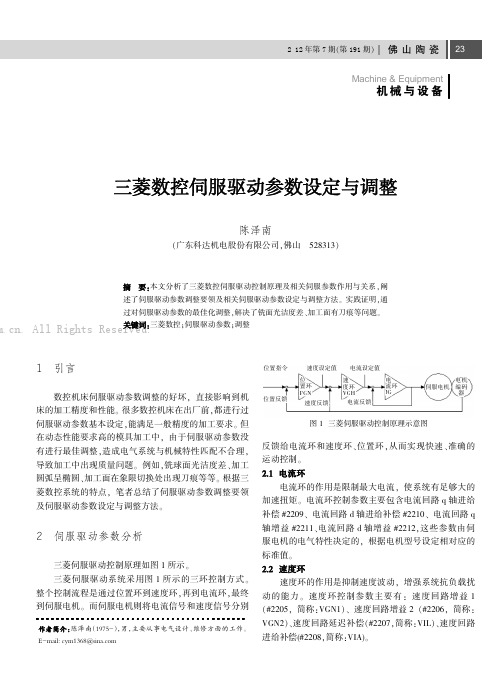
2伺服驱动参数分析三菱伺服驱动控制原理如图1所示。
三菱伺服驱动系统采用图1所示的三环控制方式。
整个控制流程是通过位置环到速度环,再到电流环,最终到伺服电机。
而伺服电机则将电流信号和速度信号分别反馈给电流环和速度环、位置环,从而实现快速、准确的运动控制。
电流环的作用是限制最大电流,使系统有足够大的加速扭矩。
电流环控制参数主要包含电流回路q 轴进给补偿#2209、电流回路d 轴进给补偿#2210、电流回路q 轴增益#2211、电流回路d 轴增益#2212,这些参数由伺服电机的电气特性决定的,根据电机型号设定相对应的标准值。
速度环的作用是抑制速度波动,增强系统抗负载扰动的能力。
速度环控制参数主要有:速度回路增益1(#2205,简称:VGN1)、速度回路增益2(#2206,简称:VGN2)、速度回路延迟补偿(#2207,简称:VIL)、速度回路进给补偿(#2208,简称:VIA)。
陈泽南(广东科达机电股份有限公司,佛山528313)本文分析了三菱数控伺服驱动控制原理及相关伺服参数作用与关系,阐述了伺服驱动参数调整要领及相关伺服驱动参数设定与调整方法。
实践证明,通过对伺服驱动参数的最佳化调整,解决了铣面光洁度差、加工面有刀痕等问题。
三菱数控;伺服驱动参数;调整陈泽南(1975-),男,主要从事电气设计、维修方面的工作。
E-mail:cym1368@图1三菱伺服驱动控制原理示意图位置指令位置环PGN速度环VGH电流环IG伺服电机电机编码器速度设定值电流设定值位置反馈速度反馈电流反馈. All Rights Reserved.参数号简称参数名称设定比设定实例说明#2203#2204#2257PGN1PGN2SHGC 位置环增益1位置环增益2SHG 控制增益18/362360140267016033861873810222547125281必须以3个参数的组合进行设定。
伺服驱动器增益参数设置
1.手动调整增益参数调整速度比例增益KVP值。
当伺服系统安装完后,必须调整参数,使系统稳定旋转。
首先调整速度比例增益KVP值.调整之前必须把积分增益KVI及微分增益KVD调整至零,然后将KVP值渐渐加大;同时观察伺服电机停止时足否产生振荡,并且以手动方式调整KVP参数,观察旋转速度是否明显忽快忽慢.KVP 值加大到产生以上现象时,必须将KVP值往回调小,使振荡消除、旋转速度稳定。
此时的KVP值即初步确定的参数值。
如有必要,经KⅥ和KVD调整后,可再作反复修正以达到理想值。
调整积分增益KⅥ值。
将积分增益KVI值渐渐加大,使积分效应渐渐产生。
由前述对积分控制的介绍可看出,KVP值配合积分效应增加到临界值后将产生振荡而不稳定,如同KVP值一样,将KVI值往回调小,使振荡消除、旋转速度稳定。
此时的KVI值即初步确定的参数值。
调整微分增益KVD值。
微分增益主要目的是使速度旋转平稳,降低超调量。
因此,将KVD值渐渐加大可改善速度稳定性。
调整位置比例增益KPP值。
如果KPP值调整过大,伺服电机定位时将发生电机定位超调量过大,造成不稳定现象。
此时,必须调小KPP值,降低超调量及避开不稳定区;但也不能调整太小,使定位效率降低。
因此,调整时应小心配合。
2.自动调整增益参数现代伺服驱动器均已微计算机化,大部分提供自动增益调整(autotuning)的功能,可应付多数负载状况。
在参数调整时,可先使用自动参数调整功能,必要时再手动调整。
事实上,自动增益调整也有选项设置,一般将控制响应分为几个等级,如高响应、中响应、低响应,用户可依据实际需求进行设置。
三菱伺服驱动器参数都设置什么啊详细点谢谢

三菱伺服驱动器参数都设置什么啊详细点谢谢软件基本设置:⑴双击SETUP154C图标——设置——系统设定——机种选择“MR——E——A”;——波特率选择“9600”——串口选择“COM3这是看你自己的计算机口了”——有站号——确定。
⑵点站号设定:选00站。
⑶点击参数——进行“参数设定、调整、变更清单显示、详细信息显示”里——点击“参数设定”——参数一览表“批量读取、核对、批量写入、变更清单、详细信息、初期设定、终止”。
⑷参数写入操作步骤:修改表里相应参数值后——回车——点“写入”。
注意:有*好的参数伺服要停电后5S再启。
软件调试运行功能(点动运行、定位运行、无电机运行、程序运行):⑴试运行:①点动运行操作:试运行——点动运行——电机转速3000r/min注意设定时不要超过3000转——加减速时间常数1000ms——点正转停止或反转停止即可。
②定位运行操作:试运行——定位运行——电机转速200r/min注意设定时不要超过3000转——加减速时间常数1000ms——移动量9310720pules——点正转停止或反转停止即可。
③程序运行操作:试运行——程序运行——点“编辑”——在“程序运行”里点“编辑”——出现“程序运行—编辑”栏,在右边大空白栏里输入以下程序如下:TIMS(3):运行程序3次;SPN(1000):进给转速1000r/min;STC(500):伺服到达额定转速时间500ms;MOV(100000):正转给移动脉冲距离100000PULES;TIM(3) :等待下一步操作时间3秒;SPN(1000):进给转速1000r/min;STC(500) :伺服到达额定转速时间500ms;MOV(-100000) :正转给移动脉冲距离100000PULES;STOP:停止;按“确定”——反悔程序运行界面——点“启动”这时电机按你编制的程序要求运行。
三菱伺服驱动器一键式调整操作流程

三菱伺服驱动器一键式调整操作流程三菱伺服放大器在投入正式使用前,最好都应该进行三菱伺服调整,以使三菱伺服放大器及伺服电机的性能能与连接机械的特性更好地匹配。
否则,在设备调试或使用过程中将可能发生机械振动、抖动、异响,如以下情况:三菱伺服放大器MR-JE系列及MR-J4系列都具有一键式调整功能(由于翻译原因可能又称为“一触式调整”),通过一键式调整,可以简单地完成伺服的调整。
但是在进行一键式调整之前需要进行一些准备工作,主要是让伺服电机循环地来回正反转。
up主刚开始接触这些产品的时候,就觉得为了进行一键式调整,特地去写让伺服电机循环来回正反转的程序还真不是一件容易的事情呢。
所以,接下来要介绍的方法是如何不通过程序使电机来回正反转。
另外,本文档介绍的方法需使用三菱伺服调整软件MR-Configurator2。
■调整前准备工作一键式调整需要在伺服电机运行中进行调整,因此,在进行调整期间,需要使伺服电机进行正反转反复运行。
可以先使用“测试运行”功能使伺服电机进行定位运行。
■各系列伺服放大器进入测试运行模式的方法:◎JE-A进入测试运行模式的方法(在伺服本体上操作):◎JE-B进入测试运行模式的方法:将参数PC05设置为0010,然后写入到伺服放大器,断电重启。
◎J4-A进入测试运行模式的方法(在伺服本体上操作):◎J4-B进入测试运行模式的方法:打开伺服放大器上方显示盖板,将拨码SW2的左边第一位向上拨,然后断电复位。
■进行测试运行使用软件MR-Configurator2,通过“菜单栏”-“测试运行”-“定位运行”打开以下窗口:设置完成后,点击“正转”,使电机运行。
■一键式调整通过“菜单栏”-“调整”-“一键式调整”打开以下窗口点击开始后,系统开始一键式调整,出现以下画面,整个调整过程大概几分钟。
调整过程中可能会出现伺服电机轻微啸响,属于正常情况。
调整完成后会出现以下画面,选择“是”。
接下来会弹出如下窗口,在右下方点击更新。
三菱伺服调整教程VerC.PPT

SV046
SV033,Bit4,5 SV033,Bit 4
SV033,bit5至7 MDS-C1/R
无 无 MDS-B MDS-C1/R
速度反馈滤波器
SV017,Bit 3
SV027,Bit F 自动设定
无
SV033,Bit 8-F 滤波器灵敏度 SV027,Bit C-D 滤波器灵敏度
MDS-C1/R
伺服调整教程
伺服调整
振动抑制(9)
其它共振点的检测与设定:继续用手轮移动伺服轴,第二
共振点的检测方法与第一共振点检测方法相同。如还有振动产
生,则需设置第二共振点 设置陷波器2频率:MDS-C1/R SV046:滤波深度SV033(bit5-7) 继续用手轮移动伺服轴,检测是否有其它的振动。如果有 高频振动存在可启动陷波滤波器3进行抑制,设SV033的bit4=1。
Ver.C
三菱电机自动化(上海)有限公司CNC技术部
伺服调整教程
伺服调整
振动抑制(8)
滤波深度 0 设定频率 281 滤波深度 4 设定频率 150 滤波深度 8
根据计算出的共振频率值查表得到要设定的参数值。
例:根据前页测得的频率371,查相对应驱动器-频率滤波深度表
设定频率 2250
1125
750 563
Ver.C
三菱电机自动化(上海)有限公司CNC技术部
伺服调整教程
伺服调整
振动抑制(3)
频率范围 设定频率 SV038 深度补偿设定 驱动类型
陷波滤波器
陷波滤波器1 陷波滤波器2 陷波滤波器3 100Hz至2250Hz SV033,bit1至3 MDS-C1/B/R
100Hz至2250Hz
750Hz至 2250Hz 1125Hz 2250Hz
三菱伺服器的调试方法

三菱伺服器的调试方法三菱伺服器的调试方法(一)三菱伺服调试是一个很重要也很繁琐的工作,需要懂得的调试方法要很多,梦翔宇科技公司技术部为大家整理的一些非常实用的常见调试方法。
三菱伺服器伺服电机常见的调试方法一、基本接线湛江市鸿瑞杰电气有限公司地址:湛江市南油南调路商业街南侧10016号(湛江变频器维修中心)主电源输入采用~220V ,从L1、L3接入(实际使用应参照操作手册);控制电源输入r 、t 也可直接接~220V;电机接线见操作手册第22、23页,编码器接线见操作手册,切勿接错。
二、试机步骤1.JOG 试机功能三菱伺服仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET ’键,然后连续按‘MODE ’键直至数码显示为‘AF -AcL ’,然后按上、下键至‘AF-JoG ’;按‘SET ’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy ’; 按住‘<’键直至显示‘SrV-on ’; 按住‘^’键电机反时针旋转,按‘V ’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET ’键结束。
2. 三菱伺服内部速度控制方式COM +(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV -ON (29脚)接COM-; 参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM, 并重新上电)调节参数No.53, 即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.三菱伺服位置控制方式COM +(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV -ON (29脚)接COM-;PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V );PLUS2(4脚)接脉冲信号,SIGN (6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS (4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
伺服驱动器参数设置方法
伺服驱动器参数设置方法(总2页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除伺服驱动器参数设置方法在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。
1.位置比例增益:设定位置环调节器的比例增益。
设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。
但数值太大可能会引起振荡或超调。
参数数值由具体的伺服系统型号和负载情况确定。
2.位置前馈增益:设定位置环的前馈增益。
设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。
不需要很高的响应特性时,本参数通常设为0表示范围:0~100%3.速度比例增益:设定速度调节器的比例增益。
设置值越大,增益越高,刚度越大。
参数数值根据具体的伺服驱动系统型号和负载值情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较大的值。
4.速度积分时间常数:设定速度调节器的积分时间常数。
设置值越小,积分速度越快。
参数数值根据具体的伺服驱动系统型号和负载情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较小的值。
5.速度反馈滤波因子:设定速度反馈低通滤波器特性。
数值越大,截止频率越低,电机产生的噪音越小。
如果负载惯量很大,可以适当减小设定值。
数值太大,造成响应变慢,可能会引起振荡。
数值越小,截止频率越高,速度反馈响应越快。
三菱MR-J2S伺服调试说明

A
105HZ
B
130HZ
C
160HZ
D
200HZ
E
240HZ
高响应
F
300HZ
自动增益调整和机床响应速度的调整方法参见下一章
6
三菱 J2S 数字交流伺服调试说明书
注 2:参数符号前带“*”的参数,改变数值后,需关电源,再 开电源才能有效。
(详细请参见三菱 J2S 伺服驱动说明书)
5.三菱 J2S 伺服驱动器的参数表:
三菱 J2S 伺服驱动器和凯恩帝数控系统相配时,只需设定以下 参数(见参数表);其余参数,一般情况下,不用修改。
参数表
TE1
L1 L2 L3 U V W
TE2
L11
L21
P
C
PE
D
伺服电机
编码器
MR-J2S-200A(1.5KW )以上 伺服驱动器
至数控系统
CN1A CN1B
至电气控制电路
CN2
编码器反馈电缆
三相200V  ̄ 220V 单相200V  ̄ 220V
L11 L21 编码器
3.通电时的检查 1) 确认三相主电路输入电压在 200V-220V 范围内,单相主电路输入
电压在 200V-220V 范围内。 建议用户选用 380V/200V 的三相伺服变压器。
2)确认接地可靠。
4.三菱 J2S 伺服驱动器的参数设定方法
三菱 J2S 伺服驱动器修改参数的操作方法,如下: 1) 按“MODE”按钮,可切换显示以下 6 种方式, 按“M O D E ” 键 状态显示 诊断显示 报警 基本参数 扩展参数 1 扩展参数 2
益 1)的数值(此值作为 N0.6 参数和 N0.36 参数最大范围的数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020三菱伺服增益调整方法及参数设置
参数设置基于三菱MR-J系列伺服
01.序文
02.自动调整模式
03响应性设定目录
03.响应性设定
content 04.手动调整模式
三菱伺服增益调整方法及参数设置
伺服放大器内置有实时自动调整功能,能实时地推断机械特性(负载惯量比并根据推断的结果自动设定最优的增益值利这个功能惯量比),并根据推断的结果自动设定最优的增益值。
利用这个功能可以容易地调整伺服放大器的增益。
三菱伺服增益调整方法及参数设置
(1) 自动调整模式1
伺服放大器在出厂状态下设定为自动调整模式1。
在此模式下,伺服放大器实时推断机械的负载惯量比,自动设定最优的增益。
通过自动调整模式1自动调整的参数如下表所示。
三菱伺服增益调整方法及参数设置
(2) 自动调整模式2
自动调整模式2在自动调整模式1下不能进行正常的增益调整时使用。
此模式下由于不能进行负载惯量比的推断,所以请设定正确的负载惯量比(参数No.PB06)的值。
通过自动调整模式2自动调整的参数如下表所示。
三菱伺服增益调整方法及参数设置
(3) 调整步骤
①使伺服电机加减速运行,负载惯量比推断机构会根据伺服电机的电流和电机速
度实时推断负载惯量比。
推断的结果被写入参数No.PB06(对伺服电机负载惯
量比)。
这个结果可在伺服放大器设置软件的状态显示画面下确认。
②在已经知道负载惯量比的值和不能很好地进行推断时,设定为“自动调整模式
2”(参数No.PA08:0002),使负载惯量比的推断停止,请手动设定负载惯量
比(参数No.PB06)。
三菱伺服增益调整方法及参数设置
(3) 调整步骤
③通过被设定的负载惯量比(参数No.PB06)的值和响应性(参数No.PA09),根据
内部的增益表,自动设定最适合的增益。
④电源接通后,每隔60分钟将自动调整的结果写入EEP-ROM中。
电源接通时,
已经保存在EEP-ROM中的各增益值将作为自动调整的初始值。
三菱伺服增益调整方法及参数设置
出厂时设定由于自动调整功能出厂时被设为有效,因此
只要运行伺服电机就能自动地根据机械状况设定最优的
增益值。
只需根据需要,改变响应性的设定值就可以完成调整
成调整。
(调整步骤如图所示)
三菱伺服增益调整方法及参数设置
(4)自动调整模式下的响应性设定
设定统性(参数)性设定,统令跟设定伺服系统整体的响应性No.PA09)。
响应性设定的越大,系统对指令的跟踪性能越好,定位整定时间越短。
但是如果设定的过大机械系统会发生振动。
所以应在不会发生振动的范围内设定希望的响应性。
三菱伺服增益调整方法及参数设置
手动模式
自动调整不能满足时,可以手动调整全部增益。
(1)速度控制的场合
用于增益调整的参数如下所示。
三菱伺服增益调整方法及参数设置
调整顺序
三菱伺服增益调整方法及参数设置
调整内容
①速度环增益(VG2:参数No.PB09):这个参数决定速度环的响应性。
增大设定值
会提高系统的响应性,然而过大的设定值容易导致机械系统发生振动。
②速度积分补偿(VIC:参数No.PB10):为消除系统对指令的静态误差,速度控制环
应设为比例积分控制。
这时用速度积分补偿(VIC)对积分时间常数进行设定。
设定值太大会使响应性变差。
但在负载惯量比较大或机械系统中有振动因素的场合,
如果这个值设定的过小,机械系统也容易发生振动。
③模型控制增益(PG1:参数No.PB07):决定对于位置指令的响应性的参数。
增大模
型控制增益,对位置指令的跟踪性变好,但设的太大在整定时容易发生超调。
三菱伺服增益调整方法及参数设置
(2) 位置控制的场合
增益调整使用的参数如下所示。
三菱伺服增益调整方法及参数设置
(b) 调整顺序
三菱伺服增益调整方法及参数设置
(c)调整内容
①速度控制增益(VG2:参数No.PB09):这个参数决定速度环的响应性。
增大此
值将提高响应性,但设定值过大。
容易导致机械系统振动。
②速度积分补偿(VIC:参数No.PB10):为消除系统对指令的静态误差,速度控
()
制环应设为比例积分控制。
这时用速度积分补偿(VIC)对积分时间常数进行设
定。
设定值太大会使响应性变差。
但在负载惯量比较大或机械系统中有振动因
素的场合,如果这个值设定的过小,机械系统也容易发生振动。
三菱伺服增益调整方法及参数设置
(c)调整内容
③位置环增益(PG2:参数No.PB08):该参数决定了位置控制环对负载变化的响
应性。
增大位置控制增益对负载变化变小,但太大机械系统容易产生振动。
④模型环增益(PG1:参数No.PB07):该参数决定对位置指令的响应性。
增大模
型控制增益可以提高对位置指令的跟踪性,但太大时在整定时容易发生超调。
2020感谢您的关注!。