工具坐标系
工具坐标系的含义

工具坐标系的含义
工具坐标系是在工程学和制造领域中经常使用的一个重要概念。
所谓工具坐标系,是指在机械加工等工作中,用来描述工作件或机床上工具位置的一种坐标系。
在实际操作中,我们通常会选择适当的参考点,确定工具坐标系的原点,然后定义三个相互垂直的坐标轴,分别表示空间中的X、Y、Z 方向。
工具坐标系的建立对于准确定位和精确加工有着至关重要的作用。
通过定义适当的工具坐标系,我们可以准确描述工件的位置和形状,从而确定加工路径、加工顺序等关键参数。
当我们需要在不同的工作件上进行相同的加工时,只需简单地进行坐标系的变换即可,极大地提高了工作效率和精度。
在现代制造业中,工具坐标系的概念得到了广泛的应用。
诸如数控加工中心、机器人加工等高精度加工领域都需要通过设定工具坐标系来完成加工任务。
工具坐标系的应用不仅使加工过程更加精准、高效,还为自动化加工提供了基础。
总的来说,工具坐标系是现代制造业中不可或缺的一部分,它能够帮助我们精确描述工件位置、确定加工路径,并提高加工效率和精度。
通过合理应用工具坐标系,我们能够更好地实现精密加工,提高产品质量,推动工业制造的发展。
工具坐标系建立的方法

工具坐标系建立的方法
1.标记法建立工具坐标系:安装工器具,观察工具搬移方向与工件的关系,考虑工具头的相关参数(如径向距离等),确定工具坐标系。
2.传感器法建立工具坐标系:针对一些数控加工设备,可借助传感器进行直接测量。
通过测量生成工具放置在设备上的位置和角度参数,建立工具坐标系。
3.计算法建立工具坐标系:通过数学模型计算建立工具坐标系。
该方法需要具备丰富的数学基础和编程技能。
4.标靶法建立工具坐标系:建立一个代表基准点或基准平面的标靶,通过测量工具与标靶的距离和角度参数得出工具坐标系的位置和方向。
六点法定义工具坐标系的步骤

六点法定义工具坐标系的步骤一、引言在工程领域中,工具坐标系是一种基本的坐标系,用于定义工具或工件在机床上的位置和姿态。
通过建立工具坐标系,可以准确描述机床中工具的位置、方向和姿态,从而实现精确的加工和定位。
本文将介绍以六点法定义工具坐标系的步骤,以帮助读者更好地理解和应用这一方法。
二、确定基准点确定基准点是定义工具坐标系的第一步。
基准点是工具坐标系的原点,通常选择机床上的一个固定点作为基准点。
在选择基准点时,需要考虑其稳定性和易于测量的特点。
三、确定X轴方向确定X轴方向是定义工具坐标系的第二步。
X轴是工具坐标系的一个重要方向,它通常与机床上的一个固定轴线平行。
在确定X轴方向时,可以选择机床上的一个固定轴线,如工作台的移动方向。
四、确定Z轴方向确定Z轴方向是定义工具坐标系的第三步。
Z轴是工具坐标系的另一个重要方向,它垂直于X轴和Y轴。
在确定Z轴方向时,可以选择机床上的一个固定轴线,如主轴的旋转轴线。
五、确定Y轴方向确定Y轴方向是定义工具坐标系的第四步。
Y轴是工具坐标系的剩余方向,它与X轴和Z轴垂直。
在确定Y轴方向时,可以选择机床上的一个固定轴线,如机床的进给方向。
六、确定坐标正负方向确定坐标正负方向是定义工具坐标系的最后一步。
在确定坐标正负方向时,需要考虑工具坐标系与机床坐标系之间的转换关系。
通常情况下,X轴正方向指向机床坐标系的正方向,Y轴正方向与机床坐标系的正方向相同,而Z轴正方向则与机床坐标系的负方向相反。
通过以上六个步骤,就可以完整地定义一个工具坐标系。
在实际应用中,可以通过测量和计算来确定工具坐标系的各个参数,如基准点的坐标和坐标轴的方向。
定义好工具坐标系后,就可以根据需要进行加工和定位,实现精确的工艺要求。
总结通过以上六点法定义工具坐标系的步骤,可以准确地描述工具或工件在机床上的位置和姿态。
这一方法在工程领域中得到广泛应用,对于实现精确的加工和定位非常重要。
在实际应用中,需要仔细选择基准点和确定坐标轴的方向,以确保工具坐标系的准确性和稳定性。
机器人工具坐标系的含义
机器人工具坐标系的含义机器人工具坐标系是机器人领域中的一个重要概念,它是描述机器人工作空间中任意点位置的数学框架。
在机器人操作和控制中,了解机器人工具坐标系的含义对于确保机器人的精准执行任务至关重要。
什么是机器人工具坐标系机器人工具坐标系是机器人工作空间中与机器人工具相关的坐标系。
它定义了机器人末端执行器(例如夹具、工具等)相对于机器人基坐标系的位置和方向。
通过描述工具坐标系,可以确定机器人末端执行器的运动和姿势。
工作空间和工具坐标系关系机器人的工作空间是机器人能够到达的区域范围,对于不同类型的机器人来说,工作空间大小和形状可能会有所不同。
在工作空间中,机器人工具坐标系确定了工具相对于机器人本体的位置和姿态,从而使机器人能够准确地执行任务。
机器人工具坐标系的重要性机器人工具坐标系的准确定义对于机器人的自动化操作至关重要。
通过精确描述工具坐标系,机器人可以准确执行各种任务,包括装配、焊接、搬运等。
同时,工具坐标系的正确定义还可以降低机器人执行任务时的错误率,提高生产效率。
工具坐标系的确定方法确定工具坐标系的方法通常包括使用传感器进行标定和校准,以确保工具坐标系与机器人基坐标系的精准对齐。
通过使用准确的标定方法,可以确保机器人在执行任务时能够准确地感知和控制工具的位置和姿态,从而实现高效的自动化操作。
结论机器人工具坐标系是机器人自动化操作中至关重要的概念,它确定了机器人末端执行器相对于机器人本体的位置和姿态。
通过精确定义和标定工具坐标系,可以确保机器人在执行任务时能够准确地感知和控制工具的运动,从而提高生产效率和质量。
深入了解机器人工具坐标系的含义和应用,对于机器人技术的发展和应用具有重要意义。
工具坐标系——精选推荐
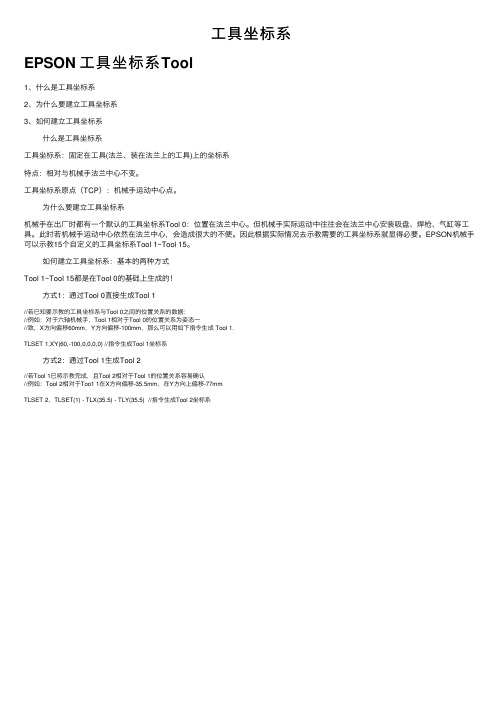
⼯具坐标系EPSON ⼯具坐标系Tool1、什么是⼯具坐标系2、为什么要建⽴⼯具坐标系3、如何建⽴⼯具坐标系什么是⼯具坐标系⼯具坐标系:固定在⼯具(法兰、装在法兰上的⼯具)上的坐标系特点:相对与机械⼿法兰中⼼不变。
⼯具坐标系原点(TCP):机械⼿运动中⼼点。
为什么要建⽴⼯具坐标系机械⼿在出⼚时都有⼀个默认的⼯具坐标系Tool 0:位置在法兰中⼼。
但机械⼿实际运动中往往会在法兰中⼼安装吸盘、焊枪、⽓缸等⼯具。
此时若机械⼿运动中⼼依然在法兰中⼼,会造成很⼤的不便。
因此根据实际情况去⽰教需要的⼯具坐标系就显得必要。
EPSON机械⼿可以⽰教15个⾃定义的⼯具坐标系Tool 1~Tool 15。
如何建⽴⼯具坐标系:基本的两种⽅式Tool 1~Tool 15都是在Tool 0的基础上⽣成的!⽅式1:通过Tool 0直接⽣成Tool 1//若已知要⽰教的⼯具坐标系与Tool 0之间的位置关系的数据://例如:对于六轴机械⼿,Tool 1相对于Tool 0的位置关系为姿态⼀//致,X⽅向偏移60mm,Y⽅向偏移-100mm,那么可以⽤如下指令⽣成 Tool 1.TLSET 1,XY(60,-100,0,0,0,0) //指令⽣成Tool 1坐标系⽅式2:通过Tool 1⽣成Tool 2//若Tool 1已将⽰教完成,且Tool 2相对于Tool 1的位置关系容易确认//例如:Tool 2相对于Too1 1在X⽅向偏移-35.5mm,在Y⽅向上偏移-77mmTLSET 2,TLSET(1) - TLX(35.5) - TLY(35.5) //指令⽣成Tool 2坐标系。
工业机器人建立工具坐标系的方法
工业机器人建立工具坐标系的方法概述工业机器人是自动化生产中的重要设备,其功能十分强大。
在进行静态或动态任务时,往往需要对工具进行定位和控制。
建立工具坐标系是实现这一目标的关键步骤。
本文将详细介绍工业机器人建立工具坐标系的方法,以及在实际应用中的注意事项。
什么是工具坐标系工具坐标系是工业机器人中用于描述工具相对于机器人末端执行器或末端执行器相对于机器人手腕的位置和姿态的坐标系统。
它在机器人执行复杂任务时发挥着至关重要的作用。
工具坐标系的建立方法工具坐标系的建立方法有多种,下面将介绍几种常用的方法。
1. 手动示教法手动示教法是最简单直接的建立工具坐标系的方法之一。
具体步骤如下: 1. 将工具固定在机器人末端执行器上。
2. 通过操纵机器人手柄将工具移动到所需位置和姿态。
3. 在机器人控制系统中记录工具的位置和姿态。
4. 完成示教后,系统将自动计算出工具坐标系。
2. 三点触摸法三点触摸法是一种使用特定工具和工件进行触摸的方法。
具体步骤如下: 1. 将特定的触摸工具安装在机器人末端执行器上。
2. 通过机器人控制系统移动机器人,使触摸工具触碰到工件上的三个点。
3. 在机器人控制系统中记录触摸点的位置和姿态。
4. 完成三点触摸后,系统将自动计算出工具坐标系。
3. 摄像机视觉法摄像机视觉法是一种使用摄像机和图像处理算法的方法。
具体步骤如下: 1. 在机器人末端执行器上安装摄像机设备。
2. 预先设置好摄像机的视野范围和参数。
3. 将工具移动到摄像机视野范围内。
4. 利用图像处理算法,识别出工具的位置和姿态。
5. 在机器人控制系统中记录识别出的位置和姿态。
6. 完成摄像机视觉后,系统将自动计算出工具坐标系。
工具坐标系的应用注意事项在实际应用过程中,建立工具坐标系时需要注意以下几点:1. 工具坐标系的稳定性工具坐标系的稳定性对于机器人执行精确任务至关重要。
在建立工具坐标系之前,需要确保工具的固定方式稳定可靠,避免在使用过程中产生移动或摆动。
abb机器人工具坐标系建立的步骤

abb机器人工具坐标系建立的步骤一、什么是ABB机器人工具坐标系ABB机器人工具坐标系是机器人使用的一种坐标系,用于描述机器人末端执行器(工具)的位置和姿态。
它是相对于机器人末端工具而言的,通过建立工具坐标系,可以方便地对机器人进行编程和控制。
二、建立机器人工具坐标系的步骤1. 确定参考点:首先需要确定一个参考点作为建立工具坐标系的基准点。
这个参考点可以是机器人基座的某一点,也可以是工件上的某一点,根据实际情况选择合适的参考点。
2. 定义坐标轴:在确定参考点后,需要定义三个坐标轴,分别为X 轴、Y轴和Z轴。
X轴通常与工具的末端执行器方向一致,Y轴与X 轴垂直且在同一平面内,Z轴与X、Y轴构成右手坐标系。
3. 定义工具坐标系原点:在确定坐标轴后,需要确定工具坐标系的原点位置。
原点通常与参考点重合,标志着工具坐标系的原点。
4. 确定工具坐标系的姿态:除了位置信息外,工具坐标系还包括姿态信息,即工具的旋转状态。
可以通过定义一个参考面来确定姿态,该参考面通常与工具表面平行。
5. 建立工具坐标系:根据以上确定的位置和姿态信息,可以建立工具坐标系。
工具坐标系可以用一个三维坐标系表示,以原点和坐标轴为基准进行描述。
6. 校准和调整:建立工具坐标系后,需要对其进行校准和调整,以确保其准确性。
可以通过机器人的示教器或专门的校准工具进行调整,使得工具坐标系与实际工具位置一致。
7. 验证和测试:建立完工具坐标系后,需要进行验证和测试,以确保其正确性和可用性。
可以通过运行一些示例程序或特定任务来验证工具坐标系的准确性和稳定性。
8. 应用和调整:一旦工具坐标系建立成功并验证通过,就可以应用于机器人的编程和控制中。
在实际应用中,可能需要根据不同的任务和工件进行调整和优化,以达到更好的效果和精度。
三、总结ABB机器人工具坐标系的建立是机器人编程和控制的基础,通过确定参考点、定义坐标轴、定义原点和姿态等步骤,可以建立起一个准确的工具坐标系。
工具坐标系

内训资料工具坐标系1概念工具坐标系是把机器人腕部法兰盘所握工具的有效方向定为Z 轴,把坐标定义在工具尖端点,所以工具坐标的方向随腕部的移动而发生变化。
工具坐标的移动,以工具的有效方向为基准,与机器人的位置、姿势无关,所以进行相对于工件不改变工具姿势的平行移动操作时最为适宜。
建立了工具坐标系后,机器人的控制点也转移到了工具的尖端点上,这样示教时可以利用控制点不变的操作方便地调整工具姿态,并可使插补运算时轨迹更为精确。
所以,不管是什么机型的机器人,用于什么用途,只要安装的工具有个尖端,在示教程序前务必要准确地建立工具坐标系。
2.1位置数据 内训资料2显示画面及内容选择主菜单〔机器人〕,选择〔工具〕。
工具坐标系包含有三部分的内容:1 位置数据2 姿态数据3 重量信息2.1位置数据位置数据是指工具尖端点在法兰盘坐标系下的坐标值。
位置数据的创建方法有两种。
1 直接输入法(不推荐使用)如果已知工具的具体尺寸,可直接输入具体数值。
2 工具校验(常用)进行工具校验,需以控制点为基准示教5个不同的姿态(TC1至 5)。
根据这5个数据自动算出工具尺寸。
应把各点的姿态设定为任意方向的姿态。
若采用偏向某一方向的姿态,可能出现精度不准的情况。
内训资料2.2 姿态数据打开工具文件后,选择下拉菜单〔实用工具〕,选择〔校验〕。
Array2.2 姿态数据姿态数据是指表现机器人的法兰盘坐标与工具坐标关系的角度数据。
把法兰盘坐标转至与工具坐标一致时所需角度作为输入值。
面对箭头的逆时针为正方向。
以 Rz Æ Ry Æ Rx的顺序输入。
例如,工具如图所示,输入 Rz=180, Ry=90, Rx=02.3 重量信息 内训资料2.3 重量信息重量信息,是指法兰盘上安装的工具的总重量、重心位置、重心位置回转惯性矩。
这些信息都登录在工具文件中。
重量 : W (单位:kg)设定安装的工具的总重量。
重心位置 : xg, yg, zg (单位 : mm)被安装的工具的整体重心位置,以其在法兰盘坐标上的位置设定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工具坐标系点数据是由直角坐标系为基准的工具(Tool)坐标系中心位置及姿势所表示的。
位置用位置数据(X 、Y 、Z ),姿势用姿势数据(U 、V 、W )指定。
除了机器人固有的Tool 0 坐标系外,用户可自定义1~15 共15个Tool 坐标系。
机器人默认的Tool 0坐标系根据机器人类型分别如下定义。
水平多关节机器人水平多关节机器人((4轴机器人轴机器人))的Tool 0坐标系坐标系的定义的定义第4轴(旋转轴)的中心为原点,把第4轴旋转到0度角度时与机器人直角坐标系平行的坐标轴为坐标轴的坐标系为Tool 0坐标系。
(参考下图)。
Tool 0坐标系是固定在第四 关节(旋转关节)的,所以第四关节时Tool 0坐标系也同时旋转。
垂直垂直多关节机器人多关节机器人多关节机器人((6轴机器人轴机器人))的Tool 0坐标系坐标系的定义的定义桌上型时,把所有关节移动到0度位置时第6关节的法兰面中心为原点,垂直上方向为X 轴,机器人直角坐标的X 轴方向为Y 轴,对第6关节法兰面垂直的方向为Z 轴的坐标系为Tool 0坐标系(请参考下图)。
Tool 0坐标系是固定在第6关节的,所以机器人姿势变化时Tool 0坐标系也相应的移动。
吊顶型和挂壁型时的Tool 0坐标系请参考下图。
用户自定义工具用户自定义工具((Tool )坐标系的应用1) 视觉定位中的Tool 应用应用。
用视觉定位来补正工件的角度时如果安装在旋转轴(第4轴)上的吸嘴或夹具的中心 (Tool 中心)与Tool 0坐标系不一致,通常需要根据角度偏移值和Tool 中心的偏移值 经过复杂的三角函数计算才能准确的抓取工件。
这时事先把吸嘴中心或夹具中心校准为自定义Tool 坐标系,就无需任何计算可准确抓 取工件。
2) 快速搬运工件时多Tool 坐标系的应用用一个吸嘴或夹具搬运工件时有时因机器人速度限制无法达到短循环时间的要求,这时 增加几个吸嘴或夹具同时抓取多个工件搬运可减短10%-20%的循环时间,根据情况有 时甚至减短30%-40%的循环时间。
每个吸嘴或夹具校准为独立的Tool 坐标系,可简单实现。
3) 点胶等经常更换Tool 时的应用时的应用。
在点胶项目中因胶针容易堵塞经常要更换,一般情况下每次更换胶头或胶桶后需要重新 校准点胶的位置,如果使用了自定义Tool 的功能,每当更换胶头或胶桶时只需重新校 准胶头的Tool 即可继续准确的点胶。
Tool 的定义定义方法方法准确定义机器人夹爪或吸嘴的Tool 是非常重要的。
根据Tool 的定义机器人通过夹爪或吸嘴取得位置数据,位置数据的全部都与Tool0不 相关,只跟夹爪或吸嘴有关。
使用SPEL +语言定义Tool 时请使用TLSET 指令。
Tool 的定义方法有以下几种。
使用机器人管理器的工具向导定义Tool Tool可以使用机器人管理器的工具向导定义Tool 。
使用工具向导按照以下步骤操作。
(1) 打开机器人管理器(2) 点击左边列表中的工具(3) 点击工具向导按钮(4) 按照工具向导的提示定义Tool 。
Tool Tool的手动计算方法的手动计算方法的手动计算方法NOTE使用以下计算Tool的方法时,不能在释放轴的状态下(SFREE状态下)计算,换句话说不能用手推动机器人。
使用步进示教窗口步进移动机器人。
Tool 的计算请按照以下步骤进行。
(1) 请把U 轴转动到0º。
(2) 步进示教窗口中的Tool设置为0(TOOL0)。
(3) 步进机器人,请把夹爪或吸嘴对准基准点(对的越准越好,对准的准确度直接影响Tool 的校准精度),此时U 轴的角度要保持0º。
(4) 现在位置的X坐标和Y坐标记入X1和Y1。
(5) 步进U轴到180º的位置。
(6) 步进机器人,请把夹爪或吸嘴对准基准点(对的越准越好,对准的准确度直接影响Tool的校准精度),此时U轴的角度要保持180º。
(7) 现在位置的X坐标和Y坐标记入X2和Y2。
(8) 使用以下公式计算Tool的偏移量。
xTool = (X2 - X1) / 2yTool = (Y2 - Y1) / 2(9) 在机器人管理器的工具窗口中输入偏移量,或在命令窗口中执行以下指令来定义Tool。
TLSET 1, XY(xTool, yTool, 0, 0)(10) 测试Tool的设置结果。
选择刚才用以上步骤定义的Tool。
举例设置为Tool1 。
然后步进机器人,请把夹爪或吸嘴对准基准点。
之后步进U轴,此时夹爪或吸嘴是对准基准点的情况下旋转不会有偏移。
使用向上的固定相机计算Tool偏移量的方法Function中首先执行定位Tool中心用的序列。
然后进行Tool偏移量的计算。
Function CalcToolBoolean foundReal x, y, u ,x0, y0, u0,xTool, yTool, rTool, thetaTool 0VRun findTipVGet findTip.tip.RobotXYU, found, x, y, uIf found Then' Get the TOOL 0 positionx0 = CX(P*) ; y0 = CY(P*) ; u0 = CU(P*)' Calculate initial tool offsets' X and Y distance from tip found with vision' to center of U axisxTool = x - x0 ; yTool = y - y0' Calculate angle at initial offsetstheta = Atan2(xTool, yTool)' Calculate angle of tool when U is at zero degreestheta = theta - DegToRad(u0)' Calculate tool radiusrTool = Sqr(xTool * xTool + yTool * yTool)' Calculate final tool offsetsxTool = Cos(theta) * rTool ; yTool = Sin(theta) * rTool' Set the toolTLSet 1, XY(xTool, yTool, 0, 0)EndIfFend抓取抓取基板的基板的Tool 计算方法在这个例子中Vision Guide 5.0用于机器人抓取需要放置的基板后计算此基板的Tool。
此时需要一个向上的相机一台。
校准相机之后需要示教放置位置。
放置位置的示教方法如下(1) 用机器人抓取基板。
(2) 为了计算Tool1请执行一次子程序CalBoardTool 。
(3) 请切换至Tool1。
(4) 请步进移动基板。
(5) 请示教基板放置位置。
F unction CalcBoardTool As BooleanBoolean foundReal fidX, fidY, fidU, rReal robX, robY, robUReal x, y, thetaReal toolX1, toolY1, toolUReal toolX2, toolY2CalcBoardTool = FALSEJump Fid1CamPos ' Locate fiducial 1 over camera robX = CX(Fid1CamPos)robY = CY(Fid1CamPos)robU = CU(Fid1CamPos)VRun SearchFid1VGet SearchFid1.Corr01.RobotXYU, found, fidX, fidY, fidU If found Thenx = fidX - robXy = fidY - robYtheta = Atan2(x, y) - DegToRad(robU)r = Sqr(x ** 2 + y ** 2)toolX1 = Cos(theta) * rtoolY1 = Sin(theta) * rElse 'target not foundExit FunctionEndIfJump Fid2CamPos ' Locate fiducial 2 over camera robX = CX(Fid2CamPos)robY = CY(Fid2CamPos)robU = CU(Fid2CamPos)VRun SearchFid2VGet SearchFid2.Corr01.RobotXYU, found, fidX, fidY, fidU If found Thenx = fidX - robXy = fidY - robYtheta = Atan2(x, y) - DegToRad(robU)r = Sqr(x ** 2 + y ** 2)toolX2 = Cos(theta) * rtoolY2 = Sin(theta) * rElse 'target not foundExit FunctionEndIfx = (toolX1 + toolX2) / 2y = (toolY1 + toolY2) / 2theta = Atan2(toolX1 - toolX2, toolY1 - toolY2) toolU = RadToDeg(theta)TlSet XY(1, x, y, 0, toolU)CalcBoardTool = TRUEFend。