反铲挖掘机工作装置设计D
反铲挖掘机工作装置设计
机械设计说明书设计题目:反铲单斗液压挖掘机工作装置设计*****学号:********指导老师:冯*09工程机械2班目录一.机械原理设计任务书 (4)§1.1设计题目简介 (4)§1.2设计任务 (4)二.单斗液压挖掘机结构简图 (6)三.设计中小型液压挖掘机结构参数一览表(参照下图) (8)§3.1单斗液压挖掘机结构几何参数详表 (8)§3.2斗容量为0.25 m3 的小型单斗液压挖掘机结构详细参数 (9)四.确定下列所给满足要求的结构参数 (12)§4.1确定长度与角度结构参数 (12)§4.2斗形参数的选择 (15)§4.3最大挖掘深度、停机面最大挖掘半径、最大卸载高度、最大挖掘高度的计算 (16)§4.3.1最大挖掘深度 (16)§4.3.2最大挖掘半径 (17)§4.3.3最大卸载高度 (17)五.动臂液压缸、斗杆液压缸、铲斗液压缸运动参数确定 (19)§5.1动臂液压缸 (19)§5.2斗杆液压缸 (19)§5.3铲斗液压缸 (20)六.机构自由度分析 (21)七.仿真 (22)八.机构搭建图 (23)九.参考文献: (25)十.心得和体会 (24)完成日期:年月日指导教师一.机械原理设计任务书学生姓名舒康班级09工机2班学号20097588设计题目:反铲液压挖掘机工作装置设计§1.1设计题目简介反铲式是我们见过最常见的,向后向下,强制切土。
可以用于停机作业面以下的挖掘,基本作业方式有:沟端挖掘、沟侧挖掘、直线挖掘、曲线挖掘、保持一定角度挖掘、超深沟挖掘和沟坡挖掘等。
反铲装置是液压挖掘机重要的工作装置,是一种适用于成批或中小批量生产的、可以改变动作程序的自动搬运和操作设备,它可用于操作环境恶劣,劳动强度大和操作单调频繁的生产场合。
设计数据与要求题号铲斗容量挖掘深度挖掘高度挖掘半径卸载高度铲斗挖掘力B 0.38 m3 4.1m 7.35 m 6.77 m 4.95 m 54.86KN§1.2设计任务1、绘制挖掘机工作机构的运动简图,确定机构的自由度,对其驱动油缸在几种工况下的运动绘制运动线图;2、根据所提供的工作参数,对挖掘机工作机构进行尺度综合,确定工作机构各个杆件的长度;3、用软件SOLIDWORKS对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
挖掘装载机工作装置结构设计论文
目录第一部分:系统开发建议书..........................共5页第二部分:WZ45.40装载工作装置设计.. (40)摘要:第一章:整机概述 (1)第一节:绪论 (1)第二节:国内外发展现状 (2)第三节:挖掘装载机发展特点 (5)第二章:铲斗设计······································.7 第三章:挖掘装载机工作装置结构设计·····················.10一、确定动臂长度、形状与车架的铰接位置 (11)二、连杆机构设计·······································.15三、转斗油缸与摇臂的铰接点以及下拉杆与机架铰接点的确定” (16)四、举升油缸与动臂和机架的铰接点 (17)五、铲斗举升平动分析及最大卸载高度、最小卸载距离的确定.................................................l 8 第四章:工作装置的受力分析............................21 第五章:工作装置的运动仿真. (32)第六章:工艺分析......................................33 第七章:工作装置的限位机构..............................35 第八章:设计心得及实习体会.............................37 第九章:附录............................................38 第三部分:翻译材料 (13)页系统开发建议书1.产品用途及使用范围:轮式装载机是一种用途广泛的施工机械,广泛应用于建筑公路铁路水电港口矿山及国防工程中,对加快工程建设速度减轻劳动强度提高工程质量降低工程成本都发挥这重要作用。
敞开式盾构反铲挖掘装置PPT课件
它有转动支座(1)、伸缩套筒 (2)、铲斗装置(3)、动臂油缸 (4)、斗杆油缸(5)、铲斗油缸 (6)和转动油缸(7)组成。
其主要工作原理:斗杆油缸设 置 在伸缩套筒的内腔中,带动伸缩套 筒 前后伸缩以实现铲斗装置的前后运 动;动臂油缸位于伸缩套筒的后方, 该第1动4页臂/共2油2页缸 伸 缩 带 动 伸 缩 套 筒 上 下
第3页/共22页
3.下面介绍几种常用盾构的优缺点: (1)敞开式--对盾构要求低,可实现国产化;出土 效率 高;可形成多种断面形式;漂石、砂卵石等对挖掘影响 较小。 缺点:不适用于复杂地形。
(2)泥水式--对底层扰动小、沉降小;适于搞地下 水压、 底隧道的施工;适于大直径化和高速化施工;适用土质 范围
• 简介
• 反铲式挖掘装置在国内外的发展现状
• 设计中的关键技术及存在的问题
• 设计方案
第1页/共22页
简介
1. 盾构机,全名叫做盾构隧道掘进机,是一种隧道掘 进的
专用工程机械。 盾构机的基本工作原理就是一个圆柱体的钢组件沿 隧洞
轴线边向前推进边对土壤进行挖掘。该圆柱体组件的壳 体即
护盾,它对挖掘出的还未衬砌的隧洞段起着临时文撑的 作
第8页/共22页
铰接式反铲是单斗液压挖掘机最常用的结构型式,动 臂、
斗杆和铲斗等主要部件彼此铰接。动臂是反铲的主要部 件, 整体式动臂,其优点是结构简单,质量轻而刚度大。缺
其点结是构更有换整的体工式作和装置组少合,式通两用种性。较差。如图1所示
图1 反铲 1—斗杆油缸;2—动臂; 3—油管;4—动臂油缸; 5—铲斗;6—斗齿;7—侧 齿;8—连杆;9—摇杆; 10—铲斗油缸;11—斗杆
第10页/共22页
设计中的关键技术及存在的问题
机械原理课程设计-反铲挖掘机工作装置设计
机械原理课程设计-反铲 挖掘机工作装置设计
本课程设计将介绍反铲挖掘机的工作原理、机构组成以及主要工作装置设计。
反铲挖掘机工作原理简介
反铲挖掘机通过液压系统和机械传动实现挖掘作业,同时具备铲平作业功能。
反铲挖掘机机构组成
主要由底盘、驾驶室、 工作装置和液压系统 等组成。
底盘负责提供稳定的 移动和支撑力。
驾驶室提供操作环境 和安全保护。
工作装置包括挖斗、 铲斗和偏航机构等。
挖掘机挖掘原理
1
工作装置下压
挖掘机通过下压工作装置使挖斗牢固地
拉杆伸展
2
插入土壤。
拉杆伸展带动挖斗前进,同时切削土壤。
3
挖斗升起
挖斗升起提起土壤,并倾倒至一侧。
挖掘机液压系统介绍
1 工作原理
液压系统通过液压油的流动实现工作装置的控制。
2 比例控制
采用比例控制技术,灵活调节工作装置的运动速度。
3 液压发动机和泵
液压发动机和泵负责提供动力和油压。
液压回路设计
单泵系统
采用简单的单泵回路,实现挖掘 机工作装置的协调运动。
液压阀
合理配置液压阀,实现工作装置 的灵活控制。
液压泵
选用高性能液压泵,确保系统的 稳定运行。
挖掘机的使用场景介绍
建筑工地
挖掘机广泛应用于建筑工地的 基础工程和土方工程。
矿山开采
挖掘机有助于矿山的矿石开采 和岩石挖掘。
道路施工
挖掘机可用于道路的开挖、平 整和修复。
反铲挖掘机的使用场景介绍
建筑工地
反铲挖掘机可用于建筑工地的地 基处理和建筑物拆除。
矿山开采
反铲挖掘机适用于矿山的土石方 开采和矿石装载。
道路施工
单斗液压挖掘机反铲工作装置设计计算ppt课件
本标准适用于已投入商业运行的火力 发电厂 纯凝式 汽轮发 电机组 和供热 汽轮发 电机组 的技术 经济指 标的统 计和评 价。燃 机机组 、余热 锅炉以 及联合 循环机 组可参 照本标 准执行 ,并增 补指标 。
本标准适用于已投入商业运行的火力 发电厂 纯凝式 汽轮发 电机组 和供热 汽轮发 电机组 的技术 经济指 标的统 计和评 价。燃 机机组 、余热 锅炉以 及联合 循环机 组可参 照本标 准执行 ,并增 补指标 。
本标准适用于已投入商业运行的火力 发电厂 纯凝式 汽轮发 电机组 和供热 汽轮发 电机组 的技术 经济指 标的统 计和评 价。燃 机机组 、余热 锅炉以 及联合 循环机 组可参 照本标 准执行 ,并增 补指标 。
本标准适用于已投入商业运行的火力 发电厂 纯凝式 汽轮发 电机组 和供热 汽轮发 电机组 的技术 经济指 标的统 计和评 价。燃 机机组 、余热 锅炉以 及联合 循环机 组可参 照本标 准执行 ,并增 补指标 。
本标准适用于已投入商业运行的火力 发电厂 纯凝式 汽轮发 电机组 和供热 汽轮发 电机组 的技术 经济指 标的统 计和评 价。燃 机机组 、余热 锅炉以 及联合 循环机 组可参 照本标 准执行 ,并增 补指标 。
本标准适用于已投入商业运行的火力 发电厂 纯凝式 汽轮发 电机组 和供热 汽轮发 电机组 的技术 经济指 标的统 计和评 价。燃 机机组 、余热 锅炉以 及联合 循环机 组可参 照本标 准执行 ,并增 补指标 。
本标准适用于已投入商业运行的火力 发电厂 纯凝式 汽轮发 电机组 和供热 汽轮发 电机组 的技术 经济指 标的统 计和评 价。燃 机机组 、余热 锅炉以 及联合 循环机 组可参 照本标 准执行 ,并增 补指标 。
本标准适用于已投入商业运行的火力 发电厂 纯凝式 汽轮发 电机组 和供热 汽轮发 电机组 的技术 经济指 标的统 计和评 价。燃 机机组 、余热 锅炉以 及联合 循环机 组可参 照本标 准执行 ,并增 补指标 。
单斗反铲挖掘机运动分析、作业参数计算、运动仿真、运动包络图绘制。
反铲挖掘机工作装置设计说明书目录1. 设计任务 (1)2. 工作装置主要部件的参数设计 (1)2.1 反铲工作装置结构方案的确定 (1)2.1.1 确定动臂结构形式和动臂油缸的布置方案 (2)2.1.2 确定斗杆和斗杆油缸的布置 (2)2.1.3 确定铲斗连杆机构的结构形式 (2)2.2 铲斗结构参数的确定 (2)2.3 动臂机构设计 (3)2.3.1 动臂机构设计的主要内容 (3)2.3.2 具体的设计步骤 (3)2.4 斗杆机构的设计 (7)2.4.1 反铲斗杆机构设计的主要内容 (7)2.4.2 斗杆具体设计步骤 (7)2.5 反铲铲斗连杆机构的设计 (8)3. 反铲工作装置的运动分析及坐标计算 (9)3.1 符号约定与坐标系的建立 (9)3.2 反铲工作装置工况的选定 (10)3.3 回转平台的运动分析及坐标计算 (10)3.4 动臂的运动分析及坐标计算 (11)3.5 斗杆的运动分析及坐标计算 (12)3.6 连杆及铲斗的运动分析及坐标计算 (14)4. 反铲工作装置作业参数计算 (16)4.1 最大挖掘深度1h 计算 (16)4.2最大挖掘高度2h 计算 (17)r计算 (17)4.3最大挖掘半径1r (17)4.4 停机面上的最大挖掘半径h (18)4.5 最大卸载高度34.6 最大垂直挖掘深度4h (18)4.7 水平底面为2.5m时的最大挖掘深度5h (19)4.8 计算结果对比 (19)5. 某工况下铰点K、Q的受力分析 (20)5.1 工况选定 (20)5.2 铰点K、Q的受力分析 (20)6. 工作装置主要部件的三维建模 (22)6.1 零部件的三维建模 (22)6.2 整体三维模型 (25)7. 包络图的绘制 (25)7.1 ADAMS软件简介 (25)7.2 Solidworks模型导入ADAMS步骤 (26)7.3反铲工作装置的ADAMS挖掘包络图绘制步骤 (26)反铲挖掘机工作装置设计说明书1. 设计任务1)设计一款反铲挖掘机的工作装置,完成其工作装置的参数设计;2)选定某个工况,进行工作装置的运动分析并且完成该工况下的铰接点坐标计算;3)反铲工作装置的主要作业参数计算;4)选定某个工况,完成该工况下某几个铰接点的受力分析;5)运用三维建模软件,完成工作装置的三维建模工作;6)运动动力学仿真软件ADAMS,画出工作装置的挖掘包络图。
挖掘机工作装置
机械原理设计任务书学生姓名_________ 班级________ 学号20127462设计题目:挖掘机工作装置机构设计一、设计题目简介单斗挖掘机是一种重要的工程机械,广泛应用于房屋建筑、筑路工程、水利建设、农林开发、港口建设、国防工事等的土石方施工和矿山采掘工业中,对减轻繁重的体力劳动、保证工程质量、加快建设速度、提高劳动生产率起着十分巨大的作用。
随着国家经济建设的不断发展,单斗挖掘机的需求量将逐年大幅度增长,其在国民经济建设中的作用将越來越显著。
反铲装置作为单斗挖掘机工作装置的一种主要形式,在工程实践中占有重要地位。
反铲装置的各组成部分有各种不同的外形,要根据设计要求选用适合的结构并对其作运动分析。
然后,在满足机构运动要求的基础上对各机构参数进行理论计算,确定各机构尺寸参数,确定挖掘机反铲装置的基本轮廓。
挖掘阻力和挖掘力是衡量挖掘机性能参数的重要性能指标,对其分析计算至关要。
挖掘阻力主要与挖掘对象及自身尺寸参数有关,而挖掘力则受众多条件限制,危险工况的分析是关键点。
在挖掘力分析基础上,可对各杆件狡接点进行力的分析计算,并进行机构设计的合理性分析。
二、设计数据与要求该型挖掘机工作装置,由两节臂,一挖斗组成,停机面最大挖掘半径(nmi):9850;最大挖掘深度(nuii):6710:最大挖掘高度(nmi):9840,液压缸驱动。
三、设计任务1、提出可能的运动控制方案,绘制方案的机构简图,计算工作装置的自由度,进行方案分析评比,从中选取最适合挖掘机工作装置的机构;2、根据所确定的机构方案进行杆及运动副的尺寸计算,要有计算过程(图解法也必须有作图步骤),并根据所计算尺寸依据国家相关标准提出油缸的布置及其运动要求;3、在机械基础实验室应用机构综合实验装置验证设计方案的可行性。
4、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
液压反铲装置
机械原理课程设计-------项目规划报告题目:设计人:指导老师:机械原理课程设计——大挖掘力、大角度、新型液压反铲装置(一)反铲装置的一般结构反铲装置是中小型液压挖掘机最主要的工作装置。
(1)结构方案(一)动臂及斗杆的结构形式动臂是工作装置中的主要构件,斗杆的结构型式往往取决于动臂的结构型式。
反铲动臂可分为整体式和组合式两类。
整体式动臂有直动臂和弯动臂两种。
直动臂构造简单、轻巧、布置紧凑,主要用于悬挂式挖掘机,如图2—1所示。
采用整体式弯动臂有利于得到较大的挖掘深度,它是专用反铲装置的常见形式(图2—2)。
整体式弯动臂在弯曲处的结构形状和强度值得注意,图2—3所示三节弯动臂有利于降低弯曲处的应力集中。
图2-3三节弯动臂近年来悬挂式挖掘机上出现了小弯臂的结构形式(图2—4),是直动臂的改良,动臂的箱形结构可以不用开口,动臂和斗杆油缸及管路的布置也比较方便。
整体式动臂结构简单、价廉,刚度相同时结构重量较组合式动臀轻。
它的缺点是替换工作装置较少,通用性较差。
为了扩大机械通用性,提高其利用率。
往往需要配备几套完全不通用的工作装置。
一般说,长期用于作业条件相似的反铲采用整体动臂结构比较合适。
组合式动臂一般都为弯臂形式。
其组合方式有两类,一类用辅助连扦(或按压缸)连接,另一类用螺栓连接。
图2—4悬挂式小弯臂连杆或液压缸铰接方案,如图2—5所示,其上、下动臂之间夹角可以借助辅助连杆或液压缸调节。
因中a为液压缸(或连杆)布置在动臂前下方的形式,b为连杆(或液压缸)布置在下动臂后上方的形式。
采用辅助液压缸来代替连杆,在作业过程中可随时进行大幅度、无级地调整上、下动锈夹角,从而提高机械的工作性能。
特别在用抓斗或反铲挖掘窄而深的基坑时,采用此方案容易得到较长距离的垂直挖掘轨迹因此可以提高挖掘质量和生产率。
由于辅助液压缸受力较大,液压缸缸径也要求较大,与其它工作液压缸缸径不易统一,在系统结构和操作上部比较复杂,实际使用中不如辅助拉杆普遍。
反铲式挖掘机的设计
[键入公司名称]机械设计原理大作业反铲挖掘机工作装置设计A[键入作者姓名][选取日期]专业:城轨一班姓名:王波学号:20116531指导教师:温亚莲目录第一章:绪论 (1)1.1:设计题目及简介 (1)1.2:反铲式挖掘机简介 (2)第二章:挖掘机机械原理 (3)2.1:计算挖掘机的自由度 (3)2.2:挖掘机工作原理 (3)2.3:几个特殊位置的确定 (4)2.3.1:最大挖掘深度1H (5)2.3.2:最大挖掘高度2H (5)2.3.3:最大卸载高度3H (5)2.3.4:最大挖掘半径R (6)2.4:工作装置参数的确定 (6)2.4.1:铲斗各参数的确定 (8)2.4.2:铲斗其他参数的确定 (9)2.5:动臂机构参数的确定 (9)2.5.1:1 与A 点坐标的确定 (9)2.5.2:l 1和l 2的计算 (9)2.5.3:l 41和l 42的计算 (10)2.6:斗杆机构参数的计算 (10)2.7:铲斗机构的参数选择 (11)2.7.1:转角范围 (11)2.7.2铲斗机构其它基本参数的计算 (11)第三章 (13)3.1:心得体会 (13)第一章:绪论1.1:设计题目及简介设计题目:反铲液压挖掘机工作装置设计A反铲式是我们见过最常见的,向后向下,强制切土。
可以用于停机作业面以下的挖掘,基本作业方式有:沟端挖掘、沟侧挖掘、直线挖掘、曲线挖掘、保持一定角度挖掘、超深沟挖掘和沟坡挖掘等。
反铲装置是液压挖掘机重要的工作装置,是一种适用于成批或中小批量生产的、可以改变动作程序的自动搬运和操作设备,它可用于操作环境恶劣,劳动强度大和操作单调频繁的生产场合图1.1:挖掘机设计数据与要求设计任务1、绘制挖掘机工作机构的运动简图,确定机构的自由度,对其驱动油缸在几种工况下的运动绘制运动线图;2、根据所提供的工作参数,对挖掘机工作机构进行尺度综合,确定工作机构各个杆件的长度;3、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
液压挖掘机反铲工作装置设计
毕业设计(论文)题目:液压挖掘机反铲工作装置设计学院:航空制造工程学院专业名称:机械设计制造及其自动化班级学号: 08031717学生姓名:指导教师:二O一二年六月1液压挖掘机反铲装置设计液压挖掘机是一种重要的工程机械,它的广泛应用对于减轻劳动量,保证工程质量,加快工程进度,提高劳动生产率起了巨大的作用。
反铲工作装置由动臂,斗杆,动臂液压缸,斗杆液压缸和铲斗液压缸组成。
本文根据液压挖掘机反铲装置的结构特点和工作原理,对其各主要机构进行了运动学分析。
并在此基础上,根据设计说明书的设计要求,结合各机构的工作特点和设计要求,在对各机构分析计算的同时,结合构件已知尺寸参数,算出各机构中构件的其它参数,为各构件的结构设计提供数据支撑。
挖掘力是衡量挖掘机挖掘能力的重要参数。
挖掘力是由各液压缸中的油液压力提供的,是主动力。
最大挖掘力的实现受诸多因素的制约,它是工作装置各铰点受力分析的基础。
挖掘阻力不仅与铲斗的尺寸形状有关,还与挖掘对象有关,是两者的综合反映。
关键词: 液压挖掘机 反铲装置 运动分析 参数设计 力学分析指导老师签名:The Design for Backhoe Equipmentof the Hydraulic ExcavatorStudent name : Dong Chen xi Class: 080317Supervisor: Xing PuAbstract: Hydraulic excavator is an important engineering machinery. Its wide application played a tremendous role to reducing the volume of labor and to ensuring project quality and to accelerating progress and to increasing productivity. Backhoe working devices is made up of a moving arm and a fighting pole and shovel and a hydraulic tank of moving arm and a hydraulic tank of fighting pole and a hydraulic tank of shovel.Based on the hydraulic excavator backhoe device characteristics and the structure of principle , to all the major institutions of the kinematic analysis . On this basis , in accordance with the design specification design requirements , with the bodies of the characteristics and design requirements , in terms of the various agencies at the same time , combining elements of known size parameters , calculated in the component agencies of other parameters , for various components , The shape of design data support.Mining is a measure of the ability of excavators digging the important parameters. Mining is done by the hydraulic cylinder of the pressure on the oil , is initiative , the largest excavation of the realization by many factors , it is also working device to hinge point Analysis of the foundation . Mining resistance not only reflect the size of bucket shape , but also with the excavation of the object , is a comprehensive reflection of the two.Keyword:hydraulic excavator backhoe device motion analysis design parameters mechanicalSignature of Supervisor:2目录1 前言1.1 课题背景及目的 (1)1.2 国内外研究状况 (1)1.3 论文构成及研究内容 (3)2 挖掘机工作装置的总体设计2.1 工作装置构成 (4)2.2 动臂及斗杆的结构形式 (5)2.3 动臂油缸与铲斗油缸的布置 (6)2.4 铲斗与铲斗油缸的连接方式 (6)2.5 铲斗的结构选择 (7)2.6 原始几何参数的确定 (8)3 挖掘机的工作装置详细的机构运动学分析3.1 动臂运动分析 (11)3.2 斗杆的运动分析 (12)3.3 铲斗的运动分析 (13)3.3.1铲斗的传动比 (13)3.3.2最大卸载高度 (15)3.3.3最大挖掘半径 (16)4 工作装置各部分的基本尺寸计算和验证4.1 铲斗各参数的确定 (17)4.1.1铲斗结构形状的设计及基本要求 (17)4.1.2铲斗主要参数的确定 (17)4.2 动臂机构参数的确定 (18)4.3 斗杆机构基本参数的选择 (20)4.4 铲斗机构基本参数的选择 (21)4.4.1转角范围 (21)4.4.2铲斗机构其它基本参数的计算 (21)5 工作装置结构设计5.1 挖掘阻力分析 (23)5.1.1转斗挖掘阻力计算 (23)5.1.2斗杆挖掘阻力计算 (24)5.2 斗杆的结构设计 (25)5.2.1斗杆的受力分析 (25)5.2.2结构尺寸的计算 (30)5.3 动臂结构设计 (32)5.3.1第一工况位置 (33)15.3.2第二工况位置 (36)5.3.3内力图和弯矩图的求解 (39)5.4 铲斗的设计 (43)5.4.1铲斗斗形尺寸的设计 (43)5.4.2铲斗斗齿的结构计算 (44)5.5 挖掘机工作装置油缸推力 (44)5.5.1铲斗油缸推力 (44)5.5.2斗杆油缸推力 (45)5.5.3动臂油缸推力 (45)5.6 销轴与衬套的设计 (46)5.6.1销轴的设计 (46)5.6.2销轴用螺栓的设计 (46)5.6.3衬套的设计 (46)6 结论参考文献 (48)致谢 (49)附录:三维建模,装配截图 (50)2液压挖掘机反铲装置设计1前言1.1课题背景及目的液压挖掘机是一种重要的工程机械,广泛应用于工业与民用建筑、交通运输、水利电气工程、农田改造、矿山采掘以及现代化军事工程等行业的机械化施工中,对减轻繁重的体力劳动、保证工程质量、加快建设速度、提高劳动生产率起着十分巨大的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西南交通大学峨眉校区机械原理课程设计机械原理课程设计设计说明书设计题目:反铲单斗液压挖掘机工作装置设计院系: 机械工程系专业: 机械制造工艺及设备学号: 20107215学生姓名: 顾永锋指导教师: 冯建日期: 2012年11月一、机械原理设计任务书学生姓名:顾永锋班级: 机制二班学号:20107215 设计题目:反铲液压挖掘机工作装置设计1、设计题目简介反铲式是我们见过最常见的,向后向下,强制切土。
可以用于停机作业面以下的挖掘,基本作业方式有:沟端挖掘、沟侧挖掘、直线挖掘、曲线挖掘、保持一定角度挖掘、超深沟挖掘和沟坡挖掘等。
反铲装置是液压挖掘机重要的工作装置,是一种适用于成批或中小批量生产的、可以改变动作程序的自动搬运和操作设备,它可用于操作环境恶劣,劳动强度大和操作单调频繁的生产场合。
2、设计数据与要求3、设计任务3.1、绘制挖掘机工作机构的运动简图,确定机构的自由度,对其驱动油缸在几种工况下的运动绘制运动线图;3.2、根据所提供的工作参数,对挖掘机工作机构进行尺度综合,确定工作机构各个杆件的长度;3.3、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
3.4、编写设计计算说明书,其中应包括设计思路、计算及运动模型建立过程以及效果分析等。
3.5、在机械基础实验室应用机构综合实验装置验证设计方案的可行性。
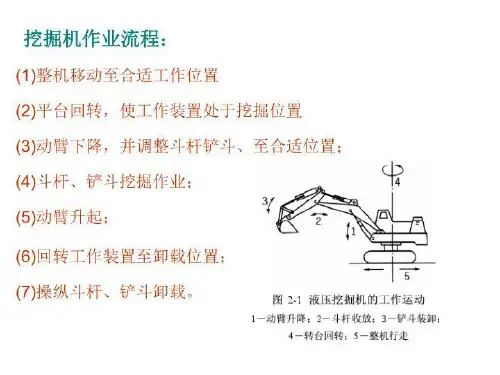
完成日期:年月日指导教师二、单斗液压挖掘机结构简图及简单分析2.1 工作装置构成液压挖掘机工作装置基本组成及传动示意图,反铲工作装置由铲斗、连杆、斗杆、动臂、相应的三组液压缸等组成,液压挖掘机的工作装置组图如图2-1所示。
1-斗杆油缸;2- 动臂; 3-油管; 4-动臂油缸; 5-铲斗; 6-斗齿; 7-侧板;8-连杆; 9-曲柄: 10-铲斗油缸; 11-斗杆.图2-1 工作装置组成图2.2 动臂与动臂油缸的布置动臂油缸一般布置在动臂的前下方,下端与回转平台铰接,支承点设在转台回转中心之前并稍高于转台平面,这样的布置有利于反铲的挖掘深度。
油自由式活塞杆端部与动臂的铰点设在动臂箱体的中间,这样虽然削弱了动臂的结构强度,但不影响以、动臂的下降幅度。
并且布置中,动臂油缸在动臂的两侧各装一只,这样的双臂在结构上起到加强盘作用,以弥补前面的不足,具体结构如图2-2所示。
1-动臂 2-动臂油缸图2-2铲斗连接布置图动臂油缸斗杆油缸2.3 铲斗与铲斗油缸的连接方式本方案中采用六连杆的布置方式,相比四连杆布置方式而言在相同的铲斗油缸行程下能得到较大的铲斗转角,改善了机构的传动特性。
该布置1杆与2杆的铰接位置虽然使铲斗的转角减少但保证能得到足够的铲斗平均挖掘力。
如图2-3所示。
1-斗杆 2-连杆机构 3铲斗图2-3 铲斗连接布置图铲斗油缸三.最大挖掘深度、停机面最大挖掘半径、最大卸载高度、最大挖掘高度的计算挖掘包络图3.1最大挖掘深度挖掘机处于最深挖掘位置处,铲斗挖掘,铲斗在发挥最大挖掘力位置进行挖掘。
此位置出现在动臂油缸全缩,即动臂位置最低处,此时斗杆与斗杆油缸铰接点、斗杆与铲斗铰接点及铲斗齿尖在同一直线上且垂直于挖掘面,如图2.2-2所示。
该位置处,铲斗中物料较多,土壤阻力较大,大臂、斗杆与铲斗的受力都很大,同时该位置也是用于只算斗杆与铲斗的危险情况的典型受力位置。
因而,此位置也是整个动力学分析中较为重要的一个状态。
图3-2 第II工况图3-3 第III工况32min 21132max 1sin min l l l y l l y H C F --+=--=α=5710)sin(y 32112011=----+l l i l C αα最大挖掘半径实体示意模型3.2最大挖掘半径挖掘机处于停机面最大挖掘半径处,铲斗挖掘,铲斗在发挥最大挖掘力位置进行挖掘,在挖掘机的设计规范中,最大挖掘半径是评价挖掘能力的主要标准之一,它决定挖掘机的挖掘范围。
该位置出现在斗杆油缸全缩,铲斗齿尖、斗杆与铲斗铰接点及斗杆与斗杆油缸铰接点这三点处于同一直线上,且大臂油缸缩进使铲斗处于地面上,如图5.2-1所示。
在该位置处,在挖掘的过程中也将受到很大的土壤阻力。
因此考虑此位置的受力与冲击将是动力学分析和强度检验的一项重要内容。
当斗杆液压缸全缩,铲斗液压缸处于适当位置使QV 转到CQ 的延长线上,CV 水平时得到最大挖掘半径:1max 403040V C X R X l l l ==+=+ V C Y Y =最大挖掘半径时的工况是水平面最大挖掘半径工况下C 、V 连线绕C 点转到水平面而成的。
通过两者的几何关系,我们可计算得到:1max R =8.9图3-2 最大挖掘半径实体示意模型3.3最大挖掘高度最大挖掘高度当动臂油缸全伸,斗杆油缸全缩以及铲斗油缸全缩时斗齿尖距离基准地面的距离。
8930sin 3332=++=φl l H H最大挖掘高度实体示意模型3.4最大卸载高度当动臂液压缸全伸,斗杆液压缸全缩,铲斗液压缸处于适当位置使QV 连线处于垂直状态时得到最大卸载高度为:1max2min()3721328CFN QFN FCQ απαααπ=∠-∠--∠=+--故Q 点坐标为:237cos Q F X X l α=+⨯ 237sin Q F Y Y l α=+⨯ 式中:max 121cos F C X X l α=+⨯max 121cos F C Y X l α=+⨯因此V 点坐标为: V Q X X = max 3V V Q Y Y Y l ==-V Y 就是最大卸载高度2max H =5.98四.机器各部件分析及参数确定3.1斗形参数设计(1)对铲斗机构设计要求:a)★保证铲斗液压缸有在铲斗转角的特定长范围有足够的挖掘力;★保证铲斗液压缸有足够的闭锁力矩;★保证铲斗油缸有足够的回摆力矩;★保证铲斗的摆角范围;★保证铲斗机构在铲斗的整个转角范围内不发生干涉现象、不出现死点和连杆机构几何特征被破坏等几何不相容现象。
★铲杆油缸的伸缩比不宜过大b)铲斗机构的载荷分析与对应转角:按理论分析将铲斗挖掘切削形状有四种,按此规律,对铲斗在相应转角处所应发挥的挖掘力大致应符合以下规律:★当F、Q、V三点一线时,其能发挥的挖掘力不低于最大挖掘力的70%-80%;★当铲斗从F、Q、V三点一线继续转动在25°-35°范围时应能发挥最大挖掘力。
c)铲斗的主要参数:斗容量q、平均斗寛B、转斗挖掘半径R和转都挖掘装满转角2ϕ(2) 铲斗设计:表2-2 铲斗参数表由公式[]220.5(2sin 2)s q R B K ϕϕ=-可得:R =1.57m 取24230.28l k l ==铲斗实体模型1.机身设计机身平面结构3. 斗杆机构参数设计a )对斗杆机构的要求:★保证斗杆液压缸有足够的挖掘力; ★保证斗杆液压缸有足够的闭锁力矩; ★保证斗杆液压缸有足够的回摆力矩; ★保证斗杆的摆角范围(105°-125°);★斗杆油缸的伸缩比不宜过大(一般在1.6-1.7范围内)。
b )斗杆机构的选择步骤第一步:2max φ= 105°和2λ= 1.6;第二步:考虑油缸的伸缩速度并参考同类机型定斗杆油缸缸径和活塞杆直径;第三步:按以下公式初步确定9l ;[]max 22392max 2()G F l l l e F +===0.74式中 max G F -----斗杆挖掘力2F -------斗杆油缸推力第四步:求斗杆油缸最短长度1min L 和D 、F 之间的距离8L : 初步假定202z e e =得:[]2max922min 22sin2 1.701l L φλ==-[]28 2.397l ==第五步:参考同类机型并根据结构情况初选斗杆结构角度EQF 和DFZ斗杆参数表斗杆结构参数斗杆实体模型4. 动臂机构参数设计(1)动臂机构的铰点位置选择依据和范围动臂弯角1α=140° 动臂转折处得长度比 3ZF BFk ZC BC =≈=1.2 11α=45° 1λ=1.6 40ze k e ==1.3 []25min0.5~0.60.66l L ==[]27min1.2~1.52.311l L == (2)动臂机构参数选择步骤已知条件:作业尺寸要求即最大挖掘高度,最大挖掘半径和最大卸料高度等;第一步: 根据底盘和转台结构初步确定动臂油缸得下铰点A 的位置坐标; 第二步: 参考样机根据比拟法初选铲斗结构参数、动臂与斗杆得长度比1k 和动臂油缸的伸缩比1λ;初选动臂弯角1α和 动臂转折处的长度比3k 初选角度11α和力臂比4k ,其范围参照前述或样机;根据机构运动特性初选与动臂与斗杆的最大夹角即参数max 160~180CFQ ∠=︒根据结构情况初选 BCZ ∠(参考样机)。
第三步: 按近似计算公式计算动臂和都干长度;斗杆长度:[]213211R l l k -=+ 动臂长度:[]2112l k l =第四步: 由三角形CZF 中的几何关系求41l 、42l 和39α第五步: 根据最大挖掘高度和最大挖掘深度时的几何关系求ACB ∠的最大、最小值1max θ、1min θ和5l ;并进一步求得长度比ρ和σ第六步: 计算1min L , 1max L 和7L 。
第七步:考虑油缸的伸缩速度参考同类机型初选动臂油缸的缸径和活塞杆直。
C动臂结构参数动臂膀实体模型5.连杆机构设计ArrayK连杆结构连杆实体模型五.机构自由度分析计算机构自由度:H L P P n F --=23活动构件数n =11,单铰数13个,复铰1个,所以,L P =15,H P =0,由上面公式可得自由度F =3×11—2×15=3六.三维建模及运动仿真位移速度加速度力。