挖掘机工作装置的简单设计方法
挖掘机工作装置控制系统的模块化设计
中图 分 类号 : U4 1 5 . 51
文 献标 志码 : B
文章 编 号 : 1 0 0 0 -0 3 3 X( 2 0 1 3 ) 0 3 - 0 0 7 6 -0 3
0 引 言
模 块 化 设 计 是 在 对 一 定 范 围 内 的 不 同 产 品 进 行 功 能 分析和 分解 的基 础 上 。 划 分并 设计 、 生 产 出一 系 列通 用模 块 或 标准 模块 , 然 后从 这 些模 块 中选 取 相 应 的模 块 , 并 补
置 组成 不 同 类型 的控 制 系统 , 完成 不 同的控 制 功 能 。 满 足 工 程 机械 不 同 的作 业需 求 。控 制 系统 模块 化 组 合 可 以快 控 制 系统 主 要原 理 为 :由系统 控 制单 元采 集控 制 信
速 地 扩 展 系 统 的 控 制 功 能 ,在 现 有 的 技 术 基 础 上 开 发 新 号 ,通 过 逻 辑 运 算 输 出 到 挖 掘 装 置 液 压 系 统 的 电磁 阀 和
t he devel opm ent per i od and cut t he cost .
【 关键 词 】 挖掘 机 ; 模 块 化设 计 ; 控 制 系统 ; 优 化
【 K e y wo r d s】e x c a v a t o r ; mo d u l a r d e s i g n ; c o n t r o l s y s t e m; o p t i mi z a t i o n
挖掘机工作装置的简单设计方法
挖掘机工作装置的简单设计方法天津理工学院 付 丽 天津人才考评中心 周立君天津理工学院 陈锡栋 摘 要:介绍了复数矢量三角形法的原理,用这种方法对单斗液压挖掘机进行位置分析和速度分析,提出了用速度分析的方法计算挖掘力,为该类机械的C AD设计提供了简单的设计方法。
关键词:液压挖掘机;复数矢量三角形法;位置分析;挖掘力的计算Abstract:A simple C AD method for operation mechanism in single-bucket hydraulic excavator is presented.C omplex number vector triangle method is applied to analyzing the position and speed,and the excavating force is w orked out based on the obtained speed.K eyw ords:hydraulic excavator;complex number vector triangle method;position analysis;excavating force calculation 单斗液压挖掘机的工作装置,主要由动臂、斗柄、铲斗和3个液压缸组成,进行工作装置设计时要精确地确定各部件的长度、弯曲角度、各铰支点的位置等许多参数。
设计中各参数要多次预选并进行试运算,通过设计获得理想的挖斗作业范围和合理的力学结构。
在机构学中这是运动分析问题。
由杆的几何参数计算出机构中有关杆的位置、速度、加速度、角速度、角加速度,势必要进行冗长的公式推导。
作者介绍的复数矢量三角形法可避免公式推导,用计算机很方便地计算出机构中任一杆的所有参数。
1 复数矢量三角形法图1所示的矢量三角形的矢量关系为A1+A2=A3每个矢量都有模长a i和幅角Φi,上式可以写为a1e jΦ1+a2e jΦ2=a3e jΦ3(1)图1 复数矢量三角形将其展开为虚实2部分,整理可得a1cosΦ1+a2cosΦ2=a3cosΦ3a1sinΦ1+a2sinΦ2=a3sinΦ3(2)该方程共有6个参数,即a1、a2、a3和Φ1、Φ2、Φ3。
正铲液压挖掘机工作装置尺寸设计与验证方法
图1 正铲液压挖掘机工作装置1.正铲液压挖掘机工作装置设计根据给定的工作参数,如表1(以下单位均m)。
表1 工作参数设计参数铲斗容量挖掘深度挖掘高度挖掘半径卸载高度 4 3.29.529.067.91为了方便工作装置的计算,现把工作装置简化为图2,并建立了以水平地面为横坐标,回转中心线为纵坐标的坐标系,各个绞点符号分别由A、B、C、D、E、G、H、I、J表示,θ1、θ2、θ3分别表示动臂相对水平面的转角,动臂和斗杆的夹角,斗杆和铲斗之间的夹角。
得到液压正铲挖掘机工作装置机构简图。
如图2所示。
1.1 比拟法确定工作装置部分尺寸比拟法:是借助于已有的大型液压正铲挖掘机的设计数据,以相似理论为基础,确定要设计的尺寸。
相似原理是通过对样机进行放大或缩小以及模型试验来确定实物结构参数、系列化产品的理图2 机构简图线型参数比例关系:31YLL=斗容量参数比例关系:Y=1qq已知美国某公司的挖掘机的整机质量为63 t,备有前卸式容量q为3.8 m)铲斗,通过比拟法可以求解出11qqmm设计机斗容量设计机斗容量样机机质量设计机质量=图3 极限位置关系222max 2max ()arccos[]2gi A ab bg ab bgL L R L X L L θ+−−−=××max R 为最大挖掘半径取9.06 m 代入解得θ2m a x =115 °。
同理可以根据最小挖掘半径求出θ2M I N =43 ° L 2 m i n =2.392、L 2 max =4.00根据最大挖掘高度求得L AGM A X =7.19、θ1M A X =82.3 °根据最大挖掘深度求得θ1M A X =64.9 °2.由水平推压力确定L BE 的尺寸假设挖掘机的工况作业为水平推压,及铲斗斗底紧贴地面沿停机面向前运动。
首先隔离斗杆和铲斗,如图图4 挖掘机受水平推压力对F点取力矩建立平衡方程:F 2e 2+F’3e’3=F a r 2图5 挖掘机转配图如图,根据以上所计算得到的尺寸值在Sol idworks建立三维装配图模型,并附上适当的转动和移动副,通过鼠标移动挖掘机的各个部件位置即可大致检测出设计的工作尺寸是否合理。
轮式挖掘机工作装置及液压系统设计
摘要挖掘机在国民经济建设的许多行业被广泛地采用, 如在工业与民用建筑、交通运输、水利电气工程、农田改造、矿山采掘以及现代化军事工程等等行业的机械化施工。
对于此,我们也应该针对一定的工况范围来设计出最适合工作的挖掘机种类及型号。
因此,挖掘机的设计是很重要的。
我选的设计机型为轮胎式挖掘机,主要设计其中的工作装置及液压系统部分。
工作装置作为挖掘机的重要组成部分,对其研究和控制是对整机开发的基础。
工作装置选择反铲式,对其进行运动学分析并用比例法和经验公式计算选择出工作装置各部分的基本尺寸。
挖掘机的发展与液压技术密不可分,二者相互促进。
液压系统设计力求做到设计出的系统重量轻、体积小、效率高、工作可靠、结构简单、操作和维护保养方便、经济性好。
本设计突出适应性,结合生产实际多举实例,又翻查国内外有关挖掘机工作装置和液压技术方面的书籍,在实例和理论中通过比较分析来设计选用布置合理及工作效率高的工作装置和良好性能的液压系统。
关键词:挖掘机;工作装置;液压系统张瑞:轮式挖掘机工作装置及液压系统设计AbstractExcavators in national economic construction is widely used in many sectors, such as in industrial and civil construction, transportation, water conservancy electrical engineering,farmla- nd transformation, mining and extractive industries modern military engineering, and so on the mechanized construction. For this, we should also address the status of certain workers to design the most appropriate work types and models of excavators. Therefore, the excavator design is very important.I voted for the tire excavator as the design models, and mainly design the work device and the hydraulic system part. Excavators working device as an important part of excavator, the research and control for it is the basis for the development of the whole machine. The work device choice backhoe type, carries on the cinematic analysis and to it chooses the work with the ratio method and the empirical formula computation to install various part of basic size. The excavator development and the hydraulic pressure technology are inseparable, the two promote mutually. The hydraulic system design endeavor achieves the system weight which designs light, the volume small, the efficiency high, the work reliable, the structure simple, the operation and the maintenance convenient, the efficiency is good.This design prominent compatibility, with progress of production much gives the example actually, also peruses the domestic and foreign related excavator work device and the hydraulic pressure technology aspect books, designs in the example and in the theory through the comparative analysis selects the arrangement reasonable and the working efficiency high work device and the good performance hydraulic system.Key word: Excavator; Work device; Hydraulic system2前言轮胎式液压挖掘机是一种应用广泛的多功能的建设施工机械,并作为工程机械的主力机种。
WY70履带式液压挖掘机工作装置机构设计
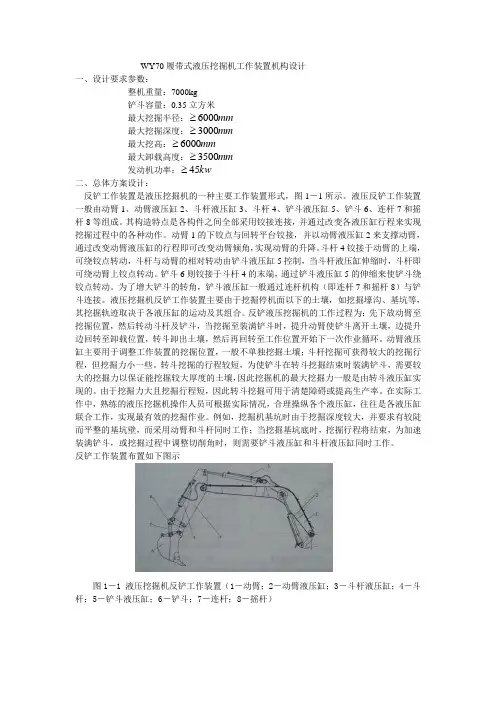
WY70履带式液压挖掘机工作装置机构设计一、设计要求参数:整机重量:7000kg铲斗容量:0.35立方米最大挖掘半径:mm 6000≥最大挖掘深度:mm 3000≥最大挖高:mm 6000≥最大卸载高度:mm 3500≥发动机功率:kw 45≥二、总体方案设计:反铲工作装置是液压挖掘机的一种主要工作装置形式,图1-1所示。
液压反铲工作装置 一般由动臂1、动臂液压缸2、斗杆液压缸3、斗杆4、铲斗液压缸5、铲斗6、连杆7和摇杆8等组成。
其构造特点是各构件之间全部采用铰接连接,并通过改变各液压缸行程来实现挖掘过程中的各种动作。
动臂1的下铰点与回转平台铰接,并以动臂液压缸2来支撑动臂,通过改变动臂液压缸的行程即可改变动臂倾角,实现动臂的升降。
斗杆4铰接于动臂的上端,可绕铰点转动,斗杆与动臂的相对转动由铲斗液压缸5控制,当斗杆液压缸伸缩时,斗杆即可绕动臂上铰点转动。
铲斗6则铰接于斗杆4的末端,通过铲斗液压缸5的伸缩来使铲斗绕铰点转动。
为了增大铲斗的转角,铲斗液压缸一般通过连杆机构(即连杆7和摇杆8)与铲斗连接。
液压挖掘机反铲工作装置主要由于挖掘停机面以下的土壤,如挖掘壕沟、基坑等,其挖掘轨迹取决于各液压缸的运动及其组合。
反铲液压挖掘机的工作过程为:先下放动臂至挖掘位置,然后转动斗杆及铲斗,当挖掘至装满铲斗时,提升动臂使铲斗离开土壤,边提升边回转至卸载位置,转斗卸出土壤,然后再回转至工作位置开始下一次作业循环。
动臂液压缸主要用于调整工作装置的挖掘位置,一般不单独挖掘土壤;斗杆挖掘可获得较大的挖掘行程,但挖掘力小一些。
转斗挖掘的行程较短,为使铲斗在转斗挖掘结束时装满铲斗,需要较大的挖掘力以保证能挖掘较大厚度的土壤,因此挖掘机的最大挖掘力一般是由转斗液压缸实现的。
由于挖掘力大且挖掘行程短,因此转斗挖掘可用于清楚障碍或提高生产率。
在实际工作中,熟练的液压挖掘机操作人员可根据实际情况,合理操纵各个液压缸,往往是各液压缸联合工作,实现最有效的挖掘作业。
正铲挖掘机工作装置机械课程设计
—斗杆挖掘力 到B点的距离
—齿尖纵向阻力 到B点的距离
—齿尖纵向阻力 到A点的距离
—动臂挖掘力 到A点的距离
所以动臂挖掘力 取 。
动臂油缸与动臂最大夹角 ,斗杆油缸与动臂最大夹角
取H=0.45 B=0.3 h=0.43 b=0.28
由上面斗杆的计算可知拉压应力和剪切应力较小,主要计算弯曲应力,在这不再计算。
6
轴承选用滑动轴承,材料选择铅青铜 ,轴承宽径比选1。在F处用一个轴承受力最大为227KN
根据公式 得:
由ห้องสมุดไป่ตู้径比选1,则 ,向大取整得
则尺寸强度满足。
轴的直径选取为 材料为40Cr, 。
第三章
1
用solidworks进行三维建模,建了个零件的三维模型和总体装配图。还用solidworks进行重要零件的有限元分析。
最大挖掘深度:
2440mm
最大挖掘半径:
8260mm
动臂长度:
3950mm
动臂转动角度:
斗杆长度:
2600mm
斗杆转动角度:
铲斗长度:
1760mm
铲斗转动角度:
斗杆挖掘力(ISO):
243kN
铲斗挖掘力(ISO):
230kN
主油路系统工作压力:
27.4Mpa
最大牵引力:
294KN
2
正铲挖掘机的工作装置如下图所示,主要由1-动臂、2-斗杆、3-铲斗、4-动臂油缸、5-斗杆油缸和6-铲斗油缸组成,其他组成有连接处的轴承和轴等。
最大拉应力为:
最大剪切应力为:
斗杆材料的选择:
选取Q235碳素结构钢,查机械工程材料表7-2可知:
所以强度满足。
当工作装置处于最大挖掘半径时,铲斗齿尖D无横向阻力,如下图所示。
挖掘机工作装置设计课程设计
教
研
室
意
见
同意
教研室主任(专业负责人)签字:
2013年1月12日
说明:一式两份,一份装订入学生毕业设计(论文)内,一份交学院(直属系)。
摘 要
本次课程设计题目是15t单斗液压挖掘机反铲工作装置。主要方法是应用比拟法和解析法,对工作装置机构的几何参数和各铰点位置进行初选,然后对动臂缸在典型工况下的举升力、液压缸闭锁力进行验算,对铲斗缸和斗杆缸及相应的整机的理论挖掘力进行了计算;对动臂,斗杆,铲斗连杆进行受力分析,了解其受力情况。在满足工作范围的和挖掘动力的前提下,绘制了挖掘包络图。
太原科技大学
课程设计说明书
15t履带悬挂式液压挖掘机反铲工作装置设计
姓 名
学 院机械工程学院
专 业机械设计制造及其自动化
年 级
指导教师
2013年01月14日
太原科技大学课程设计任务书
学院(直属系): 机械工程学院 时间:2012 年12月25日
学生姓名
指导教师
设计(论文)题目
15t履带悬挂式液压挖掘机反铲工作装置设计
图2-1 反铲机构自身几何参数的计算简图
表2.1 反铲机构自身几何参数
参数分类
机构参数组成
铲斗
斗杆
动臂
机体
符号意义
原始参数
L3=QV=1200,L13=MK=400L14=MN=400,L24=QK=400
L=KV=1330,
L2=FQ=2480,L9=EF=588
L10=FG=884,L11=EG=1187
作为工程机械的学生,认真完成好课程设计,有助于对专业课程的理论知识的总结和理解,并锻炼学生对工程实际复杂问题的观察、分析和判断能力。
毕业设计(论文)-小型液压挖掘机挖掘工作装置设计[管理资料]
小型液压挖掘机挖掘工作装置设计摘要挖掘机广泛的应用于建筑行业,排水灌溉,采矿,清除障碍和露天开矿等各种场合。
它对减轻繁重的体力劳动,保证工程的质量,加快建设的速度,提高劳动的生产率起到了巨大的作用。
随着液压传动的技术在工程机械上广泛应用,单斗液压挖掘机也有了迅速的发展。
液压挖掘机具有质量轻、体积小、结构紧凑、挖掘力大、操纵轻便,以及易实现无级变速和自动控制等一系列的优点。
为了能满足不同的作业要求,其工作装置也有很多类型。
例如:正铲,反铲,牵引绳,塔式等。
在上述的工作装置中,反铲挖掘机应用的最为广泛,因而合理设计工作装置具有十分重要的意义。
本论文主要对由动臂、斗杆、铲斗、连杆机构等组成的小型液压挖掘机工作装置进行设计。
具体内容包括以下的五部分: 挖掘机工作装置的总体设计;挖掘机的工作装置详细的机构运动学分析;工作装置各部分的基本尺寸的计算和验证;工作装置主要部件的结构设计。
通过静强度与动强度分析,得出了工作装置在静载荷下结构是安全的。
并利用同类机械的的参数做相应的调试,得出一套较合理的参数,为后续的工作打好了基础。
关键词:挖掘机;液压;动臂;斗杆;铲斗THE DESIGN OF WORKING DEVICE OF SMALLHYDRAULIC EXCA VATORABSTRACTExcavators are widely used in all branches of constructions, to drain and irrigate land, extract useful minerals, the removal of obstacle and the open-cast excavation of coal and ore. They play a tremendous role in relieving labor force, ensuring project quality, accelerating the speed of construction and improving the labor productivity.With the great development of hydraulic technology, the single buckethydraulic excavator has been improving greatly. The hydraulic excavator is provided a great many advantages,such as light weight, small volume, compact structure, powerful dig force, easy operate, continuous variable velocity, automatic controls and so order to meet the different requirements, the working device also has many types. For example: dipper shovel, pull shovel,dragline, jib crane, tower crane and so the above work device, backhoe excavator is used most widely, so the rational design of work device is of great significance.In this paper, mainly by the boom, bucket rod, bucket, excavator linkage component of small hydraulic excavator working device design. It includes thefollowing several parts:the overall design of excavator work device; excavator working device detailed kinematics analysis; the basic size calculation and verification of each part of Working device ; Through the static strength and dynamic strength analysis, the device under static loading structure is safe. Use the same mechanical parameters of the commissioning, to derive a set of reasonable parameters, for the follow-up work to lay a good foundation.KeyWord: Excavator; Hydraulic; Movable arm,Dipper,Bucket目录1 绪论 (1)课题设计的背景和意义 (1)挖掘机的行业现状 (1)挖掘机技术发展趋势 (2)工程机械的前景展望 (3)2 小型液压挖掘机反铲工作装置结构方案设计 (3)引言 (3)液压挖掘机的工作原理与基本组成分析 (3)反铲工作装置的结构设计方案分析 (5)反铲工作装置的结构形式及结构特点 (5)本章小结 (7)3 小型液压挖掘机反铲工作装置参数设计 (7)工作装置的设计原则与参数说明 (7)反铲工作装置的设计原则 (7)机构自身的几何参数设计 (8)反铲工作装置几何参数的设计计算 (8)铲斗机构主要参数的设计计算过程 (8)动臂结构参数的计算过程 (9) (13)铲斗机构及铲斗液压缸主要参数的设计过程 (15)动臂液压缸的设计计算 (18)液压系统闭锁压力的确定分析 (20)4 反铲工作装置的载荷分析计算 (21)工况分析以及确定不利工况 (21)第一种工况位置下动臂和斗杆受力分析计算 (24)第二种工况位置下动臂和斗杆受力分析计算 (28)第三种工况位置下动臂和斗杆受力分析计算 (32)斗杆内力图分析 (37)动臂内力图分析 (38)5 挖掘机工作装置截面尺寸的设计与校核 (40)工作装置斗杆截面尺寸的设计与校核 (41)斗杆的强度校核 (41)斗杆稳定性校核 (42)铰座挤压强度校核 (42)动臂截面尺寸设计与校核 (43)动臂强度校核 (44)动臂稳定性校核 (46)铰座的挤压强度校核 (46)6 结论 (58)参考文献 (59)致谢 (50)1 绪论课题设计的背景和意义总所周知,我国是一个发展中的国家,在其广阔的土地上正在进行着大规模经济建设,这就需要很多土石方施工机械为建设服务,而我们知道液压挖掘机是一类最重要的土石方的施工机械。
挖掘机行走装置设计
液压挖掘机行走装置设计第一章设计原则及方案的选择1.1 行走装置设计原则单斗液压挖掘机的行走装置是整机的支撑部分,其作用是用来承受机械的自重及工作装置挖掘时的反力,使挖掘机稳定的支撑在地面上工作。
同时又使挖掘机能在工作时作场内运动及转移工地时作运输性(轮式行走装置)运行。
因而,设计单斗液压挖掘机的行走装置时应尽量满足以下要求:1、单斗液压挖掘机应有较大的牵引力,使挖掘机在湿软的地面或高低不平的地面上行走时具有良好的越野性能,并有较强的爬坡能力和转弯能力:2、在不增高行走装置的总高度的前提下应使行走装置具有较大的离地间隙,使挖掘机在不平地面上行走具有良好的通过性能:3、要降低挖掘机的接地比压或使其具有较大的支撑面积,以提高挖掘机的稳定性:4、挖掘机在斜坡下行时不发生超速溜坡现象,挖掘时不发生下滑,提高工作时的安全可靠性:5、挖掘机的行走装置外形尺寸应符合道路运输的要求。
轮胎式行走装置与履带式相比,最大的优点是机动性好,运行速度快(通常达到20KM/h)。
如将传动箱脱档后由牵引车拖运作长距离运输时,速度可达60KM/h。
轮胎式行走装置的缺点是接地比压较大(150~500KPa)爬坡能力较小(通常不超过65%)。
挖掘时需用专门的支腿支撑使机身稳定。
目前轮胎式行走装置基本上只用在斗容量1m3以下的挖掘机中。
单斗液压挖掘机的行走装置按照传动方式可分为液压式和机械式两类。
选择行走装置的形式时,应根据工作地点的土壤条件、工作量、运输距离及使用条件等决定。
图1.1 挖掘机样机图1.2轮胎式挖掘机行走装置的结构形式轮胎式液压挖掘机形式很多,有装在标准汽车地盘上的液压挖掘机,也有装在轮胎式拖拉机地盘上的悬挂式液压挖掘机。
这些挖掘机的斗容量斗较小,工作装置回转角度受一定的限制。
若斗容量稍大、工作性能要求较高的轮胎式挖掘机斗具有专业的轮胎地盘行走装置。
专用轮胎地盘的行走装置式根据挖掘机的工况、行驶要求等因素合理设计的行走装置,挖掘机的作业及行驶操作均在驾驶室内进行,因此,操作方便,灵活可靠。
挖掘机工作装置的设计
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊三、履带式液压挖掘机工作装置设计图3.1 工作装置总体结构图工作装置的设计要满足任务书的要求以及结构上的合理,根据要求确定其结构方案,进而确定其各部件的尺寸以及铰点位置,最后还应对其作业尺寸和工作臂的强度以及挖掘力的大小进行校核,确保其满足要求。
一、确定工作装置的几何尺寸工作装置是液压挖掘机的重要组成部分之一,一般包括:动臂、斗杆、铲斗、连杆以及油缸等。
要使各参数合理协调,同时,要确保工作装置的作业尺寸能满足任务书的要求。
1.斗形参数的选择选择斗形参数时,一般考虑以下两个因素:(1)、转斗挖掘时尽量使挖掘阻力小些;(2)、转斗挖掘时尽量降低其挖掘能容量。
铲斗的四个主要参数为斗容量q,平均斗宽B,转斗挖掘半径R和转斗挖据装满转角2ϕ。
R、B及2ϕ与q之间有以下几何关系:┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊21(2sin2)2sq R B kϕϕ=-当q一定时最大挖掘阻力1maxW及转斗挖掘能容量E随着R的增大而下降。
但B和R大到一定程度,综合反映到2ϕ<90°后,1maxW和E下降渐缓,且B的增大,使附加载荷引起的对工作装置的扭矩和水平转矩随之增大全面考虑。
可取2ϕ=90°~100°,若2ϕ>100°则1maxW太大;若2ϕ<90°则B或R太大。
在q≦0.25m³时R和B对1maxW的影响差不多。
从能量的观点看,不论q如何,B对E的影响远远大于R,设计时应兼顾1maxW和E两方面,希望两者都小些,因此R和B两值不宜相差悬殊。
综合考虑,选取:2ϕ=98°,B=1.25,s k=1.25依据公式21(2sin2)2sq R B kϕϕ=-计算确定R=1.33m。
2.动臂及油缸铰点的布置11α及5l取值对挖掘机性能有影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
- - 图 $ 中的 ’(、 *+、 +- 、 .- 以及 %(、 %.、 %0 等均为假想的辅助线,但在进行运算时视为真 实杆进行运算。 %(、 %+、 %.、 %0 等几条辅助线 是进行表 $ 中前 3 个三角形运算以后,用来计算 0 点在 1%2 坐标系中的坐标参数所设置的。由最后
万方数据 — !& —
图 %& 挖斗尖点工作位置图
4 ! ( + 0 . "2
!" 速度分析与挖掘力计算
矢量三角形法可以方便地计算出所有三角形中 每个杆的速度( 沿杆长方向长度变化率) 、角速度 以及加速度和角加速度。由功率平衡原理有 ! " "" ’ ! # "# 则 & ! # ’ ! " "" # "# 式中& !" — — —工作液压缸压力 & & & !# — — —挖斗尖的挖掘力 & & & "" — — —工作液压缸活塞杆的运行速度 & & & "# — — —挖斗尖的线速度 若设 "" ’ " ,则在数值上 ! # ’ ! " # "# 可见,只要计算出挖斗尖的速度,即可方便地 计算出挖掘力的大小。挖掘力通常是由挖斗液压缸 工作时所产生的。在进行速度分析时,设液压缸 )" 和 )# 的工作速度为零,液压缸 )% 的工作速度 为 " ,通过 速 度 分 析 可 得 出 杆 $% 的 角 速 度 ! $% , 用 $% 表示其杆长,则挖斗尖点 $ 的线速度 " $ 为: " $ ’ ! $% * $% (+) 若计算液压缸 )# 单独工作时挖斗尖点产生的 挖掘力,由于液压缸 )% 视为静止不动,所以此时 , 点至 $ 点之间的杆相对位置都是不变的,$ 点是 绕 , 点转动的,在计算出 &’ 杆的角速度 ! &’ 和 &’ 杆的长度之后,就可参照式( + ) 计算出 $ 点的速 度,进而计算出挖掘力。同理也可计算液压缸 )" 万方数据 & #224 ( "" ) 《 起重运输机械》 (()
ห้องสมุดไป่ตู้
./ 复数矢量三角形法
图 A 所示的矢量三角形的矢量关系为 !A B !C D !@ 每个矢量都有模长 ! " 和幅角 ! " ,上式可以写 为 ! A * # !A B ! C * # !C D ! @ * # ! @ (A)
图 A! 复数矢量三角形
将其展开为虚实 C 部分,整理可得
万方数据 ! CKKF ( AA ) 《 起重运输机械》
表 !" 液压缸工作速度为 # ,挖斗尖点 的速度和铲斗挖掘力( 部分数值) 序 号 " # % 动臂液压 缸主动 #!/ 22#"" #!/ +%#00 #(/ 22"(+ #!/ !!.2. #"/ #2#0" #0/ #2+00 #0/ %!"!4 #+/ .+2+( #(/ +%"4% #"/ %!44" 斗柄液压 缸主动 3 "#/ +02+ 3 "#/ !!%(+ 3 ""/ .###% 3 "2/ !(%!4 3 !/ #2"#+( 3 (/ %("(+4 3 (/ #40((" 3 !/ .%4%4" 3 !/ #!0240 3 #/ !00.#. 铲斗液压 缸主动 3 %/ "!+00! 3 %/ 2#(#.0 3 %/ 4.2%.! 3 !/ 2.((2% 3 %+/ 2!%2( 3 %/ "!+00! 3 %/ 2#(#.+ 3 %/ 4.2%.! 3 !/ 2.((2" 3 %+/ 2!#.4 铲斗挖掘力 - * ./ 0 1 # %!0"/ 4#+ %+%+/ "!" %#42/ #4! "0.!/ (00 %2"/ %4+ %!0"/ 4#+ %4((/ 20( %#42/ #4! "0.!/ (.! %2"/ %!((
! ? ? ! ? ! ? ! ? ? ! ? ! ? !
注:! 表示已知, ?表示未知
程的运算,每个方程组均有 $ 个未知数,均可写出 计算式,把 & 组计算式分别编制成计算机子程序, 矢量三角形共有 !$ 个计算机子程序供编制计算机 程序时调用,采用 ’()*+ 语言编制子程 序,第 ! 类三角形的位置、速度、加速度子程序编号分别为 !!%% 、$!%% 、"!%% ,第 $ 类三角形子程序的编号为 !$%% 、$$%% 、"$%% ,其余类推。
! ! 单斗液压挖掘机的工作装置,主要由动臂、斗 柄、铲斗和 @ 个液压缸组成,进行工作装置设计时 要精确地确定各部件的长度、弯曲角度、各铰支点 的位置等许多参数。设计中各参数要多次预选并进 行试运算,通过设计获得理想的挖斗作业范围和合 理的力学结构。在机构学中这是运动分析问题。由 杆的几何参数计算出机构中有关杆的位置、速度、 加速度、角速度、角加速度,势必要进行冗长的公 式推导。作者介绍的复数矢量三角形法可避免公式 推导,用计算机很方便地计算出机构中任一杆的所 有参数。
单独工作时 $ 点所具有的挖掘力。 进行速度分析时,% 个液压缸只能有 " 个具有 运动速度,另外的 # 个处于速度为零的状态,所以 在进行 " 个完整的位置分析和速度分析的时候,只 指定其中 " 个液压缸工作,然后再指定第 # 个液压 缸工作,共需 % 次运算,最后将数据统一打印出 来。表 % 所列出的是计算出来的部分数值。
$%、%&、$& 的杆长;$% 的幅角 ’&、&( 的杆长和幅角 ’(、()、’) 的杆长;’( 的幅角 *(、(+ 的杆长和幅角 *+、+,、*, 的杆长;*+ 的幅角 +,、,- 的杆长和幅角 .-、+- 的杆长和幅角 .-、-/、./ 的杆长;.- 的幅角 ./、/0 的杆长和幅角 %&、&( 的杆长和幅角 %(、(+ 的杆长和幅角 %+、+. 的杆长和幅角 %.、.0 的杆长和幅角
挖掘机工作装置的简单设计方法
天津理工学院! 付! 丽! 天津人才考评中心! 周立君 天津理工学院! 陈锡栋
! ! 摘! 要:介绍了复数矢量三角形法的原理,用这种方法对单斗液压挖掘机进行位置分析和速度分析,提出 了用速度分析的方法计算挖掘力,为该类机械的 "#$ 设计提供了简单的设计方法。 关键词:液压挖掘机;复数矢量三角形法;位置分析;挖掘力的计算 !"#$%&’$:# %&’()* "#$ ’*+,-. /-0 -(*01+&-2 ’*3,12&%’ &2 %&24)* 5 6738*+ ,9.017)&3 *:31;1+-0 &% (0*%*2+*.< "-’= ()*: 27’6*0 ;*3+-0 +0&124)* ’*+,-. &% 1(()&*. +- 121)9>&24 +,* (-%&+&-2 12. %(**., 12. +,* *:31;1+&24 /-03* &% ?-08*. -7+ 61%*. -2 +,* -6+1&2*. %(**.< ()*+,%-#:,9.017)&3 *:31;1+-0;3-’()*: 27’6*0 ;*3+-0 +0&124)* ’*+,-.;(-%&+&-2 121)9%&%;*:31;1+&24 /-03* 31)37= )1+&-2
图 $- 单斗液压挖掘机工作机构矢量三角形划分图
单斗液压挖掘机工作装置的每个杆的长短、角 表 #" 矢量三角形划分表
已知条件 求解 %& 和 $& 的幅角 ’( 的杆长和幅角 () 和 ’) 的幅角 *+ 的杆长和幅角 +, 和 *, 的幅角 +- 的杆长和幅角 .- 的杆长和幅角 -/ 和 ./ 的幅角 .0 的杆长和幅角 %( 的杆长和幅角 %+ 的杆长和幅角 %. 的杆长和幅角 %0 的杆长和幅角
一个三角形计算得出 %0 的杆长 !" 和幅角 !" ,就 可用下式计算出 4 点的坐标参数,即 0 3 / !" 567!" (0) 0 4 / !" 789!" ’! 、’$ 、’" " 个液压缸是主动元件,作位置分
{
《 起重运输机械》 - $%%# ( !! )
析时,每个液压缸在全行程中均分 ! 个位置进行计 算,按这样计算可以得到 "#! 个 $ 点的坐标参数。 图 % 是计算机显示的挖斗尖点位置图,可以清楚地 看出工作装置的作业范围。设计时调整各杆长度和 角度等参数,可以直观地模拟运行效果,同时还可 以得出最大挖掘深度、最大装载高度、最大挖掘半 径以及动臂摆角、斗杆摆角、铲斗摆角、动臂力臂 等参数。
#" 位置分析
度、铰支点、位置都直接影响到整机作业范围、挖
序号 ! $ " # 0 1 2 & 3 !% !! !$ !" 三角形 $%& ’&( ’() *(+ *+, +,.+.-/ ./0 %&( %(+ %+. %.0 矢量关系 类型 !" . "# / !# $# . #% / $% $% . %& / $& ’% . %( / ’( ’( . () / ’) () . )* / (* +( . (* / +* +* . *, / +, +, . ,- / +"# . #% / "% "% . %( / "( "( . (+ / "+ "+ . +- / "第$ 类 第! 类 第$ 类 第! 类 第$ 类 第! 类 第! 类 第$ 类 第! 类 第! 类 第! 类 第! 类 第! 类