AMR出版社期刊格式
普通期刊论文格式要求

普通期刊论文格式要求时间:2010-07-07 11:46 来源:本站整理点击:737次一、论文篇幅:30004500字,论文必须包含200字左右的中、英文摘要及3-4个关键词。
二、论文格式:(一)题目、署名及层次格式、文字、字数要求:1、文稿采用A4幅面word文档;中文标题为三号黑体,如有副标题,另起一行,字体为四号宋体;正文为小四号仿宋一、论文篇幅:3000—4500字,论文必须包含200字左右的中、英文摘要及3-4个关键词。
二、论文格式:(一)题目、署名及层次格式、文字、字数要求:1、文稿采用A4幅面word文档;中文标题为三号黑体,如有副标题,另起一行,字体为四号宋体;正文为小四号仿宋体;英文字体为Times New Roman,标题字号为三号,字母全部大写;如有副标题,另起一行,首字母大写,正文为小四号字体;文稿应加注页码。
2、题目居中,作者署名(五号、仿宋体)及单位信息(五号、仿宋体)标在题目下,(当作者单位不同时,应用1、2……标识区别)。
需做作者简介时,可在当页下方划一条横线,在横线下加说明。
3、摘要和关键词(五号、黑体)写在题目后、正文前,摘要和关键词的内容部分为五号仿宋体。
如下图所示:数字城市化进程王**1 杨**2 张**1(1.****大学,北京100001;2.****研究院,天津300001)摘要:*****************************************************************关键词:*** *** ***4、论文的层次,统一要求采用:1 *******1.1 *******1.1.1 *******1.1.1.1******* (占一行或接排。
当接排时,标题后要加标点。
一级标题采用四号黑体,二级标题采用小四号黑体,三级标题采用小四号宋体加粗)(二)文稿和图稿其它要求:1、正确阐述技术内容。
名词术语应符合国家有关标准、规范。
Advanced-Materials-Research-(AMR)英文全文格式说明-参考文献格式

縮■后用AWW间 名A,者 •,均开作后个姓害Z M旦區前 名,用其 与. 名WP 者开 姓姓廉隔者—邻个d作聶一沁期刊名 卷号年份期号起蛤贝码所有实词首 字母均大写多卷标注格式:\ ok 12-18这个垃圾期刊的格式很操蛋,参考文献格式我根本看不懂,找了好久终于找到了介绍。
在最后部分。
EI 收录的期刊Advaneed Materials Research论文的格式要求中文版详解,方便中国人使用,若想此刊投稿,值得收藏。
Fig. 1, Fig. 2, ”表示,Fig.和后面的数字间加1空格,数字后面与文字之间加2个空格。
注意图的质量。
如要节省版面,可以一行中并排放置多个图片。
5. 公式的格式及其引用5.1所有公式及文中的复杂符号,均用公式编辑器输入,不要用文本框或图形输入。
5.2公式单独成段,左缩进5mm 段前12磅,段后0磅;公式编号用('数字)”表示,排在右端,两端对齐;正文中引用公式时,用Eq.1, Eq.2 ”表示。
例:c2 = a2 + b2. (1) 6. 参考文献格式及引用格式6.1参考文献按引用的先后, 在正文的有关处用[1],[2,3]标明(请勿用上标标注), 这些数字与文末的参考文献相对应。
6.2参考文献的编号与内容用制表符 Tab 隔开,字体及大小与正文相同,行间距为单倍距,格式为悬挂缩进 0.8cm 。
6.3参考文献中作者,名在前用简写,姓在后用全称,有多个作者时,作者与作者之 间用逗号分开,最后一个作者与前面的作者之间用and 相连(如玉娇龙,王处一,李静就写为:J.L. Yu, C.Y. Wang and J. Li )。
6.4参考文献中如果不是英文文献, 请在参考文献后用英文注明语种, 女口:(In Chinese )。
6.5几种常见参考文献的格式编排规范:(a )期刊类:(作者:刊名,卷(年)No.期号,p.起始页码.),刊名的所有实词首 字母大写。
期刊发表时间标注格式
期刊发表时间标注格式在学术界,期刊发表时间标注格式是非常重要的,它能够准确地反映出一篇文章的学术价值和研究成果的时效性。
正确的时间标注格式不仅可以帮助读者了解到文章的发表时间,还可以帮助学者们在引用他人的研究成果时,准确地引用文章的发表时间,从而维护学术界的严谨性和公正性。
本文将介绍期刊发表时间的标注格式,帮助大家准确地标注文章的发表时间。
首先,我们来看一下期刊发表时间的基本格式。
一般来说,期刊发表时间的标注格式包括年、月和日三个部分。
例如,一个完整的标注格式可能是“年-月-日”。
在一些学术期刊中,发表时间可能只标注年份,而不标注具体的月份和日期。
在这种情况下,我们可以使用“年”来表示发表时间。
另外,有些期刊还会标注文章的在线发表时间,这种情况下我们需要在标注格式中加上“在线发表时间”或者“网上发表时间”的说明,以示区分。
其次,我们需要注意的是,在进行期刊发表时间标注时,要尽量使用标准的时间格式,避免出现错误。
一般来说,我们可以使用阿拉伯数字来表示年、月和日,例如“2022-05-20”。
在标注月份时,可以使用英文缩写来表示,例如“May”,这样可以避免出现歧义。
另外,对于一些特殊的发表时间,比如在某一年内发表了多篇文章的情况,我们可以使用字母来表示顺序,例如“2022a”、“2022b”等,以示区分。
最后,我们需要注意的是,标注格式中的发表时间应该尽量准确地反映出文章的实际发表时间。
在一些情况下,由于期刊的印刷和发行时间等原因,文章的实际发表时间可能会有所滞后,这时我们需要标注清楚文章的实际发表时间,以免给读者造成误解。
另外,对于一些在线发表的文章,我们还需要标注清楚文章的在线发表时间,以便读者了解到文章的最新动态。
综上所述,期刊发表时间标注格式是非常重要的,它能够准确地反映出文章的发表时间,帮助读者了解到文章的时效性和学术价值。
在进行标注时,我们需要注意使用标准的时间格式,避免出现错误,并尽量准确地反映出文章的实际发表时间。
发表期刊论文格式要求
1.1 二级标题(5号宋加粗,左齐) 正文
1.1.1 三级标题(5号宋,左齐) (1)公式要求 公式编辑器中需定义的主要参数依次为:10.5, 6, 4.5。 公
式编号右齐,单倍行距,公式变量用斜体,矢量、张量为斜体 加黑;三角函数、双曲函数、对数、特殊函数的符号、圆周 率、自然对数底e、虚数单位i、j、微分符号d等均排正体。
说明:排版格式仅供参考,如果作者排版困难,不必排2栏,可将重点放 在满足文摘、文献及图表要求上。
第一次出现的公式符号需说明,如 (1)
式中:为接触面法线与作用力的交角。
(2)表格要求 表格采用三线表形式, 上下线为1磅, 次线为0.5磅, 表中字 号为6号宋体,中、英文表名字号如表1,2。物理量应注明国 际标准单位。
方法
等效支撑 计算 薄壳有限 元计算 实测
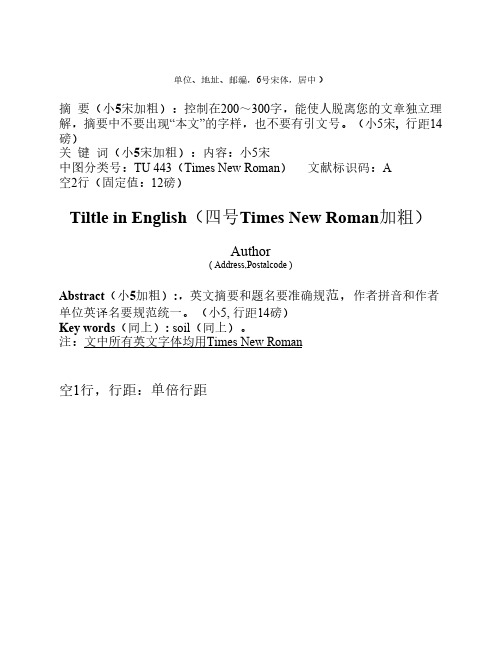
表1 中文表名(小5号宋体加粗,居中)
Tiltle in English(四号Times New Roman加粗)
Author
( Address,Postalcode )
Abstract(小5加粗):,英文摘要和题名要准确规范,作者拼音和作者 单位英译名要规范统一。(小5, 行距14磅)
Key words(同上): soil(同上)。 注:文中所有英文字体均用Times New Roman
名, 时间(年). 国际. 国家标准规范: [5] 著者. 规范编号 规范名称[S]. 出版地:出版者,年份
注意:英文参考文献列全所有作者,英文期附例:
参 考 文献
[1] MATLOCK H S. Correlation for design of laterally loaded pile in soft clay[C]//Proceedings of 2nd Offshore Technology
期刊稿件体例和编加规范
期刊稿件体例和编加规范期刊稿件体例1. 稿件正文统一采用宋体(英文用Times New Roman),五号字体,1.5倍行距,标题用三号宋体,摘要及关键词用楷体。
2. 正文层次标题应简短明确(以不超过15个字为宜),标题末不用标点符号。
标题分级序号请依据以下规则:中文:一、(一)、1.、1)、(1)英文:1 .、1)、(1)、A.、a.3. 各级标题均黑体。
第一级标题顶格(不缩进),其他级标题缩格排版。
4. 文中的表格名称统一为:表1,表2等(非表一、表二)。
表格如有标题,标题及表1/表2等置于表格上方,加粗,居中排。
5. 通栏表的正确使用(关于此项,排版公司和质检任老师说法不一,最好的方法就是避免通栏表出现在页面的中间,或移上或移下为宜)注:a) 、b)、c)、d)为加有表格的文字排版格式。
例子:a) c)b) d)6. 表示范畴的,如“1—10名同学”,统一用一字线。
7. “/”左右不空格。
8. sb, sth后面不要点。
9. 参考文献词条最后以起始页码结尾的,省略小点。
页码间用一字线。
10. 参考文献每个词条不缺项,出版地不作省略项。
11. 论文集不标页码。
论文集如果是一个作者用(Ed.),如果是两个或两个以上用(Eds.)。
12. 参考文献作者为两个及以上的,在正文中用顿号隔开,最后一个作者前加“和”,而不是“&”,在参考文献内作者间用逗号隔开,最后一个作者名前加&。
13. 参考文献按照字母顺序排序。
14. 文后的参考文献词条与文中夹注需一一对应,避免多词条或少词条的情况,并保证作者名、时间等的一致性。
具体可参见已出版期刊样书。
15.特别注意课标的两个参考文献:①中华人民共和国教育部. 2001. 全日制义务教育普通高级中学英语课程标准(实验稿)[S]. 北京:北京师范大学出版社.②中华人民共和国教育部. 2003. 普通高中英语课程标准(实验)[S]. 北京:人民教育出版社.16. “例如”之后如跟的是一句话,用冒号,不用逗号。
中华麻醉学杂志排版格式
中华麻醉学杂志排版格式
中华麻醉学杂志的排版格式要求如下:
1. 文章应分为引言、方法、结果和讨论等部分,以便于读者阅读。
2. 文章应尽量控制在3000\~5000字之间。
3. 文章不需要写标题,只需从引言部分开始写正文。
4. 正文应使用宋体或者Arial字体,字号为12号,行间距为倍。
5. 段落之间应留有适当的空行,以便于区分不同部分。
6. 中文文题一般不宜超过20个汉字,英文文题应与中文文题含义一致。
以上格式要求仅供参考,如需了解更多格式要求,可以查阅中华麻醉学杂志官网或咨询编辑部工作人员。
K系列EI会议带有着ISSN刊号

K系列EI会议带有着ISSN刊号K1:【期刊刊号ISSN: 1867-5662】 EI出版物全称:《International Conference on Computer Science and Education 》 出版社:德国Springer 出版社,德国施普林格(Springer)是世界上著名的科技出版集团,国内知名⼤学的图书馆都提供其数据库系统。
杂志刊号ISSN: 1867-5662。
格式:单栏格式。
6个页码。
【EI源刊:AISC杂志!】 截稿时间: 10⽉31⽇。
只剩下最后的不到⼀个⽉的时间!机会难得!抢上末班车!快速检索! 会议时间:2012年3⽉ 18-19⽇ 会议邮寄:2012年3⽉ 20⽇从德国寄出。
稿件类型:通吃所有的专业⽂章(含科学、技术、天⽂地理、教育、⽂科等)。
信息、教育、科技、经济、管理等所有门类的⽂章,写作建议:将专业和计算机、信息化、教育等结合起来。
特点:快速检索,但名额有限!发⼀篇少⼀篇! K2:【期刊刊号ISSN:1865-0929】 EI出版物全称:《International Conference on Computer technology and Education》 出版社:德国Springer 出版社,德国施普林格(Springer)是世界上著名的科技出版集团,国内知名⼤学的图书馆都提供其数据库系统。
杂志刊号ISSN:1865-0929。
格式:单栏格式。
6个页码。
【EI源刊:CCIS 杂志!】 截稿时间: 10⽉31⽇。
只剩下最后的不到⼀个⽉的时间!机会难得!抢上末班车!快速检索! 会议时间:2012年4⽉ 22-23⽇ 会议邮寄:2012年4⽉ 25⽇从德国寄出。
稿件类型:通吃所有的专业⽂章(含科学、技术、天⽂地理、教育、⽂科等)。
信息、教育、科技、经济、管理等所有门类的⽂章,写作建议:将专业和计算机、信息化、教育等结合起来。
特点:快速检索,但名额有限!发⼀篇少⼀篇! K3:【期刊刊号ISSN: 1022-6680】 EI出版物全称:《International Conference on Advanced Material Research》 出版社:瑞⼠TTP出版社 截稿时间:2011年10⽉30⽇ 会议时间: 2012年1⽉7-8⽇ 会议邮寄:2012年1⽉20⽇从瑞⼠寄出。
AMR音频编码器概述及文件格式分析

AMR音频编码器概述及文件格式分析全称Adaptive Multi-Rate,自适应多速率编码,主要用于移动设备的音频,压缩比比较大,但相对其他的压缩格式质量比较差,由于多用于人声,通话,效果还是很不错的。
AMR-WB应用于EDGE、3G可充分体现其优势。
足够的传输带宽保证AMR-WB可采用从6.6kb/s到23.85kb/s共九种编一、分类1. AMR: 又称为AMR-NB,相对于下面的WB而言,语音带宽范围:300-3400Hz,8KHz抽样2. AMR-WB:AMR Wide Band,语音带宽范围: 50-7000Hz , 16KHz 抽样“AMR-WB”全称为“Adaptive Multi-rate - Wideband”,即“自适应多速率宽带编码”,采样频率为16kHz,是一种同时被国际标准化组织ITU-T和3GPP采用的宽带语音编码标准,也称为G722.2标准。
AMR-WB提供语音带宽范围达到50~7000Hz,用户可主观感受到话音比以前更加自然、舒适和易于分辨。
与之作比较,现在GSM用的EFR(Enhanced Full Rate,增强型全速率编码)采样频率为8kHz,语音带宽为200~3400Hz。
AMR-WB应用于窄带GSM(全速信道16k,GMSK)的优势在于其可采用从6.6kb/s,8.85kb/s和12.65kb/s三种编码,当网络繁忙时C/I恶化,编码器可以自动调整编码模式,从而增强QoS。
在这种应用中,AMR-WB抗扰度优于AMR-NB。
AMR-WB应用于EDGE、3G可充分体现其优势。
足够的传输带宽保证AMR-WB可采用从6.6kb/s到23.85kb/s共九种编码,语音质量超越PSTN固定电话。
二、编码方式1. AMR-NB:10 - - TDMA-EFR SID11 - - PDC-EFR SID12-14 - - For future use15 - - No Data (No transmission/No reception) 2. AMR-WB:Frame Type Index ModeIndicationModeRequestFrame content (AMR-WB mode,comfort noise, or other)0 0 0 AMR-WB 6.60 kbit/s1 1 1 AMR-WB 8.85 kbit/s2 2 2 AMR-WB 12.65 kbit/s3 3 3 AMR-WB 14.25 kbit/s4 4 4 AMR-WB 15.85 kbit/s5 5 5 AMR-WB 18.25 kbit/s6 6 6 AMR-WB 19.85 kbit/s7 7 7 AMR-WB 23.05 kbit/s8 8 8 AMR-WB 23.85 kbit/s9 - - AMR-WB SID (Comfort Noise Frame)10-13 - - For future use14 - - speech lost15 - - No Data (No transmission/Noreception)- -二、AMR 帧格式:AMR 有两种类型的帧格式:AMR IF1 和 AMR IF21. AMR IF1:IF1 的帧格式如下图所示:FrameType, Mode Indication, Mode Request 对应上面两个表格里的数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Research on the Optimal Design of Soccer Robot based on theMechanical AnalysisMenghai Liang1, a, Li Gang2, b1Department of Electrical Engineering and Automation, Luoyang Institute of Science andTechnology, Luoyang, 471023, China2Department of Electrical Engineering and Automation, Luoyang Institute of Science andTechnology, Luoyang, 471023, Chinaa email: lylglg@,b email:kli20112012@Keywords: Soccer Robot; Mechanical Analysis; Optimal DesignAbstract. According to the problem that the intelligence is not high of the soccer robot, using the mechanical theory as a guide, making some mechanical analyses and calculations on the pressure and transmutation states of chip kick mechanics, and conducting optimal design too, then making the structure of chip kick mechanics more and more rationalization. Experiments show that the new soccer robot controller features a quick response and high servo rigidity, and provide a kind of method for improving and perfecting the soccer robot control system, at the same time, filling the needs of producing.IntroductionRobot World Cup [1][2] is a form of football, through the competition to test new technologies in order to promote artificial intelligence, robotics and development projects of related areas; meanwhile, it also provides a broad platform to the robot hardware, software technology research. Robot soccer game is put forward in recent years of multi-agent system development platform, and it is a typical multi-agent robotic System. Soccer robot design has become the artificial intelligence and robotics research in the one of the hotspots field [3].Soccer robot control system [4] [5] as an executive structure control system, the quality of its performance largely determines the outcome of the game; it directly affects the accuracy and flexibility of the robot motion, and the reliability of the whole system [6]. Because of the intelligence of soccer robot be designed at home and abroad is often not high, It can not meet the needs of the robot control system [7]. Therefore, the development of a high-performance control system has become an urgent desire [8].The control system working environment is dynamic, and the other parties of the robots move are often unpredictable. This requires the robot can not only control their players accurately, but also can actively control and track the ball [9]. The mobile robot design and manufacture technology, motor drive control, sensors and the requirements of the artificial intelligence are very high. Many researchers have been committed to perfect and improve the performance of the robot [10].In this paper a new optimal design of soccer robot control system which is based on mechanical analyses and calculations on the pressure and transmutation states of chip kick mechanics, this new control system with high precision for speed control and high dynamic quality.Design of the Chip Kick MechanicsAt present the main means is low click type and the lever type, low click type is on the bottom of the ball through attack the ball flew over obstacles, this method is able to pick the ball’s advantages and makes the energy loss in institutions least, the shortcoming is the ball high requirement of the shape of the electromagnetic valve [11]. Therefore, the development of a high-performance control system of soccer robot has become an urgent desire for soccer robot fans.With the continuous development of robot technology, the team at home and abroad with the basic function can play football and in gradually to pick the ball function development. Pick the ball design break through the traditional 2 d game model, this makes robot can directly hit the opponent ball and don't have to go around, this simplified decision-making, increase attack and breakthrough are quite useful. But because of the limits of the robots, how to make robots in the limited space in both playing and picking the ball is a big test of the structure design.Pick the ball mainly uses in the robot a throw-in, pass the ball and goalkeeper big foot clearance[12]. According to the rules and regulations, the robot can't longer than 0.016m, and then according to the movement method, pick the ball’s length and height demand for: Throw in ball. Rules defenders to leave at kick-off 0.5m, but it has to pick the ball out and shoot above 20°. Pass a similar to shoot angle of goalkeeper clearance, but distance is not so strict requirements. Because the others can close to our robot, so pick the ball out shoot the bigger angle the better, and the farther the distance the better. According to the demand of the game, according to its own tactics making soccer robots pick the ball institutions put forward the following requirements, pick the ball maximum height of 0.035m, pick the ball the furthest distance 3 m, pick the ball out of the shot more than 38° angle.It is known that the cue ball between pick the ball rod have large enough frictional force, and the role of the electromagnet only a few milliseconds process, so we can assume that between the ball and pick the ball device without relative motion, at this time, pick cue ball and a ngle α turn after pick cue separation. Pick in the cue ball club, the fulcrum and the ball contact point and ball center composed of triangle relations can export:22sin()sin sin l w r R φθθφ+==+ (1) 2πβφθαψ=+++- (2) In the type: l is the fulcrum height; w is picking out the length of club; r is the fulcrum which is to centre distance; R is QiuBanJing. β is Ball shoot out angle. From the laws of rotation we can find: ()()sin cos()c b J F L l m g l h m gr ζαφθαψ=---++++ (3) In the type(3): L stands for pulling force point role of height; m c stands for pick cue quality; h stands for pick cue censored height; m b stands for the ball quality. Request to be tight with the ball club and the friction force ball etc. By kinetic energy theorem we can find:21()(1cos )[sin()sin()]()2k c b c b W m g l h m gr m m v αφθψφθα=--+++-++++ (4) 2max (sin )2v H gβ= (5) 2max sin(2)v S gβ= (6) In the type, W k stands for electromagnet work, which can be used to get the ball injection speed v , when the ball with speed v and Angle β from robot, H max is flight level, S max is fall place distance. Thus, we can get the ball through the calculation of pick out the angle, and pick out the speed, pick the ball and pick the ball high furthest, etc.Institutions Optimization DesignThe ball R =21.6mm, m b =45g. To ensure the cue ball and pick and not run into low contact choose other parts of the cue for w =16mm. From the law of conservation of energy, it is known that the lighter lift stick, the faster the speed at first, consider to pick cue the deformation of stress intensity factor, finally optimization for m c =34g.Since robot have play ball institutions, in order not to decorate with the wheel position conflict, only can pick the ball in play on electromagnetic valve electromagnet institution s. According to the electromagnet diameter and robot’s height, takeL =58mm, h =19mm.According to the above theory formula, let’s take the part of determined and the other institutions into the condition, and let the rest of the adjustable parameters for quantitative analysis of the design. It can be found to pick the ball with the organization of the contact point has a best value. The point of the height and pick the ball institutions can achieve maximum distance, and the position of the ball fulcrum makes the lift distance and the lift height maximization produce different places, so we can't thought set lift ball point to satisfy the high altitude and the maximize the farthest distance at the same time. Electromagnet for height and the distance of the influence is linear, so we should as far as possible to improve the average output power electromagnets. According to the front of the quantitative analysis, set to pick the ball distance as far as the objective function is as follows:2sin(2)max ()[(()(1cos )(sin()sin())]c b k c b F X m g l h m gr W m m gβαφθψφθψα-=--+++-+++-+ (7) Design variable X = [β, l, H ] T . Set constraint conditions: shot out angle 45°<β<90°; Pick the ball institutions fulcrum height 0.049 m<l <0.59m; lift the ball institutions and the ball the contact point high 0m<H <0.049m.The optimization mathematical model belongs to the constraint single-objective nonlinear optimization problems. Choose SUMT penalty function method to get the best value for all variables, this method through the tectonic augmented objective function, and the constraint optimization problem into a series of unconstrained minimization problems, through a series of questions to solve constraint and to get original constrained problems optimal solution. Definition function is:21(,)()[max(0,())]m i i F x a f x a g x ==+∑ (8)The initial plan for x 0=[45,0.049,0]T . After 17 iteration calculation, and get the optimal solution: l =0.043m,H =0.0038m,S max =4.38 m.Test resultsPut the calculations parameters into Matlab ball movement track simulation, the results shown in Figure1 (a). Among them, the longest flight distance is 4.312m, top flight is 1.102m, and the flight time is 0.896s. In physical experiment, with corresponding image processing program acquisition lift the ball a parabolic height and distance data, through the parabolic curve fitting the obtained data see Figure 1 (b) and (c)(a) The theoretical curves (b) chip kick mechanics (c) No chip kick mechanicsFig.1. The experimental resultsThe ability of pick the ball robot has reached theoretical calculation expected. The experiment started with no the institutions, the ball can not very well joint with pick cue, causing pick the ball dynamics change range is very large, and pick the ball height and the average of the theoretical calculation of the distance is smaller than the calculated assumption the height and distance.After the ball add tape loading agencies, institutions force the ball the reverse spin, the ball close to pick the cue, pick the ball transfer fully energy to the ball, pick the ball effect is obvious stable. But it is found that the actual pick the ball after add tape loading agencies less than thetheory calculated average distance.ConclusionBased on the analysis of the mechanical theory as the foundation, designed the soccer robot pick the ball institutions optimal design process, found aim function, select design variables and the corresponding optimization algorithm to optimize a complete set of institutions. At last through the test to get the final performance parameters of the institution. Experiments show that the system has higher accuracy and stability, the new optimize pick the ball have design basic requirements, and achieved good ideal control effect.AcknowledgementIn this paper, the research was sponsored by the Nature Science Foundation of Henan Province (Project No. 201112400450401) and Youth Fund Project of Luoyang Institute of Science and Technology (Project No. 2010QZ16).References[1] Satoshi Kagami,Tomonobu Kitagawa,Koichi Nishiwaki,Tomomichi Sugihara,Masayuki Inaba,Hirochika Inoue. A Fast Dynamically Equilibrated Walking Trajectory Generation Method of Humanoid Robot [J], 2002.[2] HIROKIK, MINORUA, YASUOK, ET al.RoboCup: a challenge problem for AI and robotics. HirokiK. RoboCup-97: Robot Soccer World Cup [C]. Berlin: Springer, 1998.38-43.[3] Zhizhong Yin. Application of FPGA control DC motor servo system [J]. Inner Mongolia Science and Technology and Economy, 2008 177 (23) 101-103.[4] Joerg Christian Wolf, Phil Hall, Paul Robinson, Phil Culverhouse. Bioloid based Humanoid Soccer Robot Design, 2007.[5]Wu Chuan-yu, He Lei-ying, Design and Realization of Instructional RPPR-Robot, Research and Exploration in Laboratory.2007, 26(10)[6] Nishiwaki K,Kagami S. High Frequency Walking Pattern Generation based on Preview Control of ZMP, IEEE International Conference on Robotics and Automation. 2006.[7] Chen Nan and so on. For the field of industrial and highly interconnected, TI launched a new Sitara ARM9 microprocessor. [J]. Global Electronics, 2010 (5) 86-87.[8] Vision Heading Navigation Based on Navigation Curve [A]. Proceedings 2010 International Conference on Intelligent Computing and Integrated Systems[C]. 2010.[9] Chen Nan and so on. For the field of industrial and highly interconnected, TI launched a new Sitara ARM9 microprocessor. [J]. Global Electronics, 2010 (5) 86-87.[10] Jonghoon ZMP Park,Youngil Youm.General ZMP Control for Bipedal Walking. IEEE International Conference on Robotics and Automation. 2007.[11] Chunmei Xu. Mechanical servo system based on fuzzy neural network for complex control [J]. Control Engineering .2010:17 (2):146-148.[12] Zhijun He. LM629-based motor servo control system design [J]. Mechanical design and manufacture .2009 (2) 40-42.。