一种高精度超声波测距系统的设计
基于单片机超声波测距系统的设计和实现
基于单片机超声波测距系统的设计和实现超声波测距系统是利用超声波传播速度较快的特性,通过发射超声波并接收其回波来测量距离的一种常见的测距方式。
在本文中,我们将介绍基于单片机的超声波测距系统的设计和实现。
一、系统设计原理超声波测距系统主要由超声波发射器、超声波接收器、单片机和显示器组成。
其工作原理如下:1.发送超声波信号:超声波发射器通过单片机控制,向外发射超声波信号。
超声波的发射频率通常在40kHz左右,适合在空气中传播。
2.接收回波信号:超声波接收器接收到回波信号后,将信号经过放大和滤波处理后送入单片机。
3.距离计算:单片机通过测量超声波发射和接收的时间差来计算距离。
以声速343m/s为例,超声波的往返时间与距离之间的关系为:距离=时间差×声速/2、通过单片机上的计时器和计数器来测量时间差。
4.数据显示:单片机将计算得到的距离数据通过显示器显示出来,实时展示被测物体与超声波传感器之间的距离。
二、系统设计步骤1.系统硬件设计:选择合适的超声波模块,其具有超声波发射器和接收器功能,并可通过接口与单片机连接。
设计好电源电路以及超声波传感器与单片机之间的连接方式。
2.系统软件设计:根据单片机的型号和编程语言,编写相应的程序。
包括超声波信号的发射和接收控制,计时和计数功能的编程,距离计算和数据显示的实现。
3.硬件连接和调试:将硬件连接好后,对系统进行调试。
包括超声波模块与单片机的连接是否正确,超声波信号的发射和接收是否正常,计时和计数功能是否准确等。
5.优化和改进:根据实际测试结果,对系统进行优化和改进。
如增加滤波和放大电路以提高信号质量,调整超声波模块的发射频率,改进显示方式等。
三、系统实现效果完成以上设计和实施后,我们可以得到一个基于单片机的超声波测距系统。
该系统使用简单,测距精度高,响应速度快,适用于各种距离测量的应用场景。
同时,该系统还可根据具体需求进行各种改进和扩展,如与其他传感器结合使用,增加报警功能等。
基于STM32单片机的高精度超声波测距系统的设计

基于STM32单片机的高精度超声波测距系统的设计一、本文概述超声波测距技术因其非接触、高精度、实时性强等特点,在机器人导航、车辆避障、工业测量等领域得到了广泛应用。
STM32单片机作为一种高性能、低功耗的嵌入式系统核心,为超声波测距系统的设计提供了强大的硬件支持。
本文旨在设计一种基于STM32单片机的高精度超声波测距系统,以满足不同应用场景的需求。
二、超声波测距原理本部分将介绍超声波测距的基本原理,包括超声波的产生、传播、接收以及距离的计算方法。
同时,分析影响超声波测距精度的主要因素,为后续系统设计提供理论基础。
三、系统硬件设计3、1在设计基于STM32单片机的高精度超声波测距系统时,我们遵循了“精确测量、稳定传输、易于扩展”的总体设计思路。
我们选用了STM32系列单片机作为系统的核心控制器,利用其强大的处理能力和丰富的外设接口,实现了对超声波发射和接收的精确控制。
在具体设计中,我们采用了回波测距法,即发射超声波并检测其回波,通过测量发射与接收之间的时间差来计算距离。
这种方法对硬件的精度和稳定性要求很高,因此我们选用了高精度的超声波传感器和计时器,以确保测量结果的准确性。
我们还考虑到了系统的可扩展性。
通过STM32的串口通信功能,我们可以将测量数据上传至计算机或其他设备进行分析和处理,为后续的应用开发提供了便利。
我们还预留了多个IO接口,以便在需要时添加更多的传感器或功能模块。
本系统的设计思路是在保证精度的前提下,实现稳定、可靠的超声波测距功能,并兼顾系统的可扩展性和易用性。
31、1.1随着物联网、机器人技术和自动化控制的快速发展,精确的距离测量技术在各个领域的应用越来越广泛。
超声波测距技术作为一种非接触式的距离测量方式,因其具有测量精度高、稳定性好、成本相对较低等优点,在工业自动化、智能家居、机器人导航、安防监控等领域得到了广泛应用。
STM32单片机作为一款高性价比、低功耗、高性能的嵌入式微控制器,在智能设备开发中占据重要地位。
毕业设计方案超声波测距仪的设计方案

毕业设计方案超声波测距仪的设计方案1. 引言超声波测距仪是一种常用的测量设备,可以通过发送超声波信号并接收回波来测量距离。
本文将介绍一种基于超声波的测距仪设计方案,用于毕业设计项目。
2. 设计目标本设计方案的主要目标是设计一种精确、稳定、成本效益高的超声波测距仪。
具体而言,设计要求如下:- 测距范围:至少10米- 测量精度:在0.5%以内- 响应时间:小于100毫秒- 成本:尽可能低廉- 可靠性:能够在不同环境条件下稳定工作3. 设计原理超声波测距仪的工作原理是利用超声波在空气中传播速度恒定的特性,通过测量超声波的往返时间来计算距离。
一般来说,超声波测距仪由发射模块和接收模块组成。
发射模块:发射模块用于发送超声波信号,通常由脉冲发生器和超声波发射器组成。
脉冲发生器用于产生短暂的高频脉冲信号,驱动超声波发射器将信号转换成超声波信号并发射出去。
接收模块:接收模块用于接收反射回来的超声波信号,并将其转换成电信号。
接收模块一般由超声波接收器和信号处理电路组成。
超声波接收器将接收到的超声波信号转换成电信号,并通过信号处理电路进行放大、滤波和波形整形等处理,得到可用的测量信号。
距离计算:通过测量超声波的往返时间,可以计算出距离。
超声波在空气中的传播速度约为340米/秒,因此距离可以通过距离等于速度乘以时间的公式来计算。
4. 硬件设计硬件设计是实现超声波测距仪的关键。
以下是硬件设计方案的主要组成部分:超声波发射器和接收器:选择适当的超声波发射器和接收器是关键。
一般来说,发射器和接收器的频率应该相同,常见的频率有40kHz和50kHz。
此外,发射器和接收器需要具有相匹配的电特性,以确保信号的传输和接收的准确性。
脉冲发生器:脉冲发生器的设计应考虑到发射模块的需求,需要产生高频、短暂的脉冲信号。
常用的脉冲发生器电路有多谐振荡电路和555定时器电路等。
信号处理电路:接收到的超声波信号需要进行处理,以便得到可用的测量信号。
高精度超声测距系统设计
Science &Technology 。
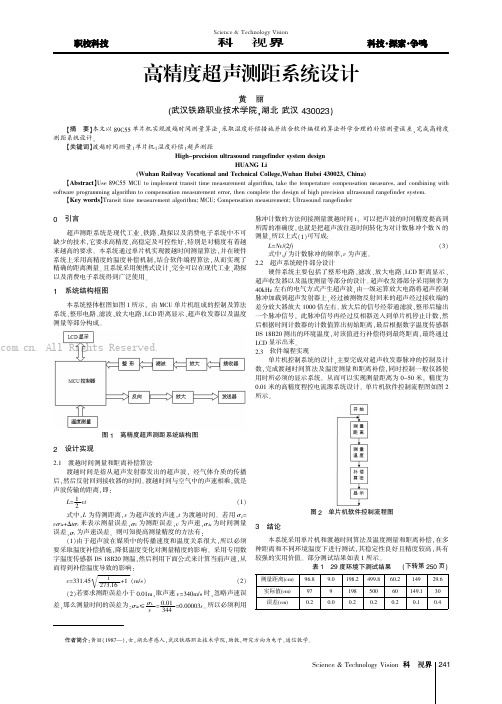
图1高精度超声测距系统结构图
2设计实现
2.1渡越时间测量和距离补偿算法
渡越时间是指从超声发射器发出的超声波,经气体介质的传播后,然后反射回到接收器的时间。
渡越时间与空气中的声速相乘,就是声波传输的距离,即:
L =12
vt (1)式中,L 为待测距离,v 为超声波的声速,t 为渡越时间。
若用σL =vσΔt +Δtσv 来表示测量误差,σL 为测距误差,v 为声速,σΔt 为时间测量误差,σv 为声速误差。
则可知提高测量精度的方法有:
(1)由于超声波在媒质中的传播速度和温度关系很大,所以必须要采取温度补偿措施,降低温度变化对测量精度的影响。
采用专用数字温度传感器DS 18B20测温,然后利用下面公式来计算当前声速,从而得到补偿温度导致的影响:
v =331.45
t 273.16
+1√
(m/s)(2)(2)若要求测距误差小于0.01m,取声速v =340m/s 时,忽略声速误差,那么测量时间的误差为:σ≤σL =0.01=0.00003s 。
所以必须利用
单片机软件控制流程图
本系统采用单片机和渡越时间算法及温度测量和距离补偿种距离和不同环境温度下进行测试,其稳定性良好且精度较高部分测试结果如表1所示29度环境下测试结果
9.0198.2499.81985000.0
0.2
. All Rights Reserved.
多媒体技术将加速舞蹈教学各个方面的进程。
基于单片机控制的超声波测距系统的设计

基于单片机控制的超声波测距系统的设计一、概述。
超声波测距技术是一种广泛应用的测距技术,它能够非常精确地测量物体到传感器的距离。
本文介绍的基于单片机控制的超声波测距系统主要由控制模块、信号处理模块和驱动模块三部分组成。
其中,控制模块主要实现超声波信号的发射与接收,信号处理模块主要实现对测量结果的处理和计算,驱动模块主要实现对LED灯的控制。
二、硬件设计。
1.超声波发射模块:采用 SR04 超声波发射传感器,并通过单片机的PWM 输出控制 SR04 的 trig 引脚实现超声波信号的发射。
2.超声波接收模块:采用SR04超声波接收传感器,通过单片机的外部中断实现对超声波信号的接收。
3.控制模块:采用STM32F103单片机,通过PWM输出控制超声波发射信号,并通过外部中断接收超声波接收信号。
4.信号处理模块:采用MAX232接口芯片,将单片机的串口输出转换成RS232信号,通过串口与上位机进行通信实现测量结果的处理和计算。
5.驱动模块:采用LED灯,通过单片机的GPIO输出控制LED灯的亮灭。
三、软件设计。
1.控制模块:编写程序实现超声波信号的发射与接收。
其中,超声波发射信号的周期为 10us,超声波接收信号的周期为 25ms。
超声波接收信号的处理过程如下:(1)当 trig 引脚置高时,等待 10us。
(2)当 trig 引脚置低时,等待 echo 引脚为高电平,即等待超声波信号的回波。
(3)当 echo 引脚为高电平时,开始计时,直到 echo 引脚为低电平时,停止计时。
(4)根据计时结果计算物体到传感器的距离,将结果通过串口输出。
2.信号处理模块:编写程序实现接收计算结果,并将结果通过串口与上位机进行通信。
具体步骤如下:(1)等待串口接收数据。
(2)当接收到数据时,将数据转换成浮点数格式。
(3)根据测量结果控制LED灯的亮灭。
以上就是基于单片机控制的超声波测距系统的设计。
该系统能够通过精确测量物体到传感器的距离并对测量结果进行处理和计算,能够广泛应用于各种实际场合。
超声波测距设计方案

超声波测距设计方案1. 概述超声波测距是一种利用超声波传感器对目标物体进行距离测量的技术。
它具有非接触、精度高、速度快等优点,广泛应用于工业自动化等领域。
本设计方案旨在实现一个基于Arduino的超声波测距系统,可以测量距离在2cm~400cm之间的目标物体,并将结果显示在液晶屏上,以方便用户观察和使用。
2. 系统组成本系统由硬件和软件两部分组成,硬件系统包括超声波传感器、Arduino主控板、液晶屏、电源等部分;软件系统包括Arduino的程序。
2.1 超声波传感器超声波传感器是本系统中最关键的部分,它通过发射超声波信号并接收回波信号,测量目标物体与传感器的距离。
常用的超声波传感器有HC-SR04、JSN-SR04T等型号,本设计方案使用HC-SR04超声波传感器。
2.2 Arduino主控板Arduino是一种开源的嵌入式系统,具有方便、易用、可扩展等特点,可以实现各种各样的控制任务。
本设计方案使用Arduino UNO主控板,它是一种基于ATmega328P芯片的开发板,具有丰富的接口和较高的性能和稳定性。
2.3 液晶屏液晶屏是显示距离测量结果的部分,本设计方案采用16*2字符型液晶屏,能够显示2行16个字符,显示结果清晰、直观。
2.4 电源本系统采用外接直流电源供电,电压为5V,可以通过USB接口或外部电源插头供电。
3. 系统原理本系统的测距原理基于超声波传感器发射超声波信号并接收回波信号的原理。
当超声波传感器发射超声波信号后,信号会以声速传播在空气中,当遇到目标物体后,部分波信号会被目标物体反射回来,形成回波信号,超声波传感器接收到回波信号后,再通过计算超声波信号的来回时间、声速等参数,便可以计算出目标物体与传感器的距离。
4. 系统设计超声波传感器通过接口连接到Arduino主控板,并需要外接电源,具体接线图如下所示:超声波传感器 VCC -> Arduino 5V液晶屏 RW -> Arduino GND整个系统的软件设计主要包括两部分,一部分是超声波测距的程序,另一部分是液晶屏显示的程序。
超声波测距系统的设计
超声波测距系统的设计引言:一、硬件设计:1.选择传感器:超声波传感器是测距系统的核心部件,通常采用脉冲法进行测量。
在选择传感器时,应考虑工作频率、测量范围、精度和稳定性等参数,并根据实际需求进行选择。
2.驱动电路设计:超声波传感器需要高频信号进行激励,设计驱动电路时需要根据传感器的工作要求来设计合适的电路,保证信号稳定且能够满足传感器的工作需求。
3.接收电路设计:超声波传感器产生的脉冲回波需要经过接收电路进行信号放大和滤波处理,设计接收电路时需要考虑信号放大的增益、滤波器的截止频率以及抗干扰能力等因素。
4.控制板设计:控制板是超声波测距系统中的核心控制器,负责控制测距过程、数据处理以及通信等功能。
在设计控制板时,应根据系统的要求选择合适的微控制器或单片机,并设计合理的电路布局和电源电路。
二、软件编程:1.驱动程序开发:根据传感器的规格书和数据手册,编写相应的驱动程序,实现对超声波传感器的激励和接收。
2.距离计算算法开发:通过测量超声波的往返时间来计算距离,根据声速和时间的关系进行距离计算,并根据实际情况对计算结果进行修正。
3.数据处理和显示:根据实际需求,对测量得到的距离进行处理,并将结果显示在合适的显示设备上,如LCD屏幕或计算机等。
4.数据通信:如果需要将测量结果传输至其他设备或系统,则需要编写相应的数据通信程序,实现数据的传输和接收。
三、系统测试与优化:1.测试传感器性能:测试测距系统的稳定性、精度和灵敏度等性能指标,根据测试结果对系统参数进行优化和调整。
2.系统校准:超声波测距系统可能受到环境温度、湿度和声速等因素的影响,需要进行校准以提高测量精度。
3.系统集成与实际应用:将超声波测距系统与实际应用场景进行集成,进行实际测试和验证。
总结:超声波测距系统的设计包括硬件设计和软件编程两个方面,其中硬件设计主要包括传感器选择、驱动电路设计和接收电路设计等;软件编程主要包括驱动程序开发、距离计算算法开发、数据处理和显示以及数据通信等。
课程设计实验报告-超声波测距仪的设计
超声波测距仪的设计一、设计目的本设计利用超声波传输中距离与时间的关系,采用STC51单片机进行控制和数据处理,设计出能够精确测量两点间距离的超声波测距仪。
同时了解单片机各脚的功能,工作方式,计数/定时,I/O口的相关原理,并稳固学习单片机的相关内容知识。
二、设计要求1.设计一个超声波测距仪,能够用四段数码管准确显示所测距离2.精度小于1CM,测量距离大于200CM三、设计器材元器件数量STC51单片机 1个超声波测距模块URF-04 1个电阻〔1K 200 4.7K〕 3 个晶振〔12MHz〕 1 个共阳极四位数码管 1 个极性电容〔33pF〕 2 个非极性电容〔22uF〕 1 个四、超声波测距系统原理331.45米/秒,由单片机负责计时,单片机使用12.0M晶振,所以此系统的测量精度理论上可以到达毫米级。
超声波测距的算法设计: 超声波在空气中传播速度为每秒钟340米〔15℃时〕。
X2是声波返回的时刻,X1是声波发声的时刻,X2-X1得出的是一个时间差的绝对值,假定X2-X1=0.03S,那么有340m×0.03S=10.2m。
由于在这10.2m 的时间里,超声波发出到遇到返射物返回的距离如下:图1 测距原理超声波测距器的系统框图如下列图所示:图2 系统框图五、设计方案及分析〔包含设计电路图〕4.1硬件电路设计4.1.1 单片机最小系统控制模块设计与比拟方案二:采用STC51单片机控制。
STC51单片机是一种低功耗、高性能CMOS8位微控制器,具有 8KB的系统可编程Flash 存储器。
AT89S52具有以下标准功能: 8k字节Flash,256字节RAM, 32 位I/O 口线,看门狗定时器,2 个数据指针,三个16 位定时器/计数器,一个6向量2级中断结构,全双工串行口,片内晶振及时钟电路,能够满足题目设计的所有要求,而且我们对STC51单片机也比拟熟悉,因此我们选择方案二。
最小系统电路图如图3所示图3 单片机最小系统显示模块设计采用四位共阳极数码管显示,连接电路简单,显示电路连接图如图4所示图4 数码管显示电路超声波测距模块a.本系统采用超声波模块URF04进行测距,该模块使用直流5V供电,理想条件下测距可达500cm,广泛应用于超声波测距领域,模块性能稳定,测度距离精确,盲区〔2cm〕超近。
超声波测距设计毕业设计
超声波测距设计毕业设计一、引言距离测量在许多领域都具有重要的应用,如工业自动化、机器人导航、汽车防撞等。
超声波测距作为一种非接触式的测量方法,具有测量精度高、响应速度快、成本低等优点,因此在实际工程中得到了广泛的应用。
本次毕业设计旨在设计一种基于超声波的测距系统,实现对目标物体距离的准确测量。
二、超声波测距原理超声波是一种频率高于 20kHz 的机械波,其在空气中的传播速度约为 340m/s。
超声波测距的原理是通过发射超声波脉冲,并测量其从发射到接收的时间间隔,然后根据声速和时间间隔计算出目标物体与传感器之间的距离。
假设发射超声波脉冲的时刻为 t1,接收到回波的时刻为 t2,声速为c,距离为 d,则距离 d 可以通过以下公式计算:d = c ×(t2 t1) / 2三、系统硬件设计(一)超声波发射模块超声波发射模块主要由超声波换能器和驱动电路组成。
超声波换能器将电信号转换为超声波信号发射出去,驱动电路则提供足够的功率和电压来驱动换能器工作。
(二)超声波接收模块超声波接收模块主要由超声波换能器、前置放大器、带通滤波器和比较器组成。
换能器将接收到的超声波信号转换为电信号,前置放大器对信号进行放大,带通滤波器去除噪声和干扰,比较器将信号整形为方波信号。
(三)控制与处理模块控制与处理模块采用单片机作为核心,负责控制超声波的发射和接收,测量时间间隔,并计算距离。
同时,单片机还可以将测量结果通过显示模块进行显示,或者通过通信模块与上位机进行通信。
(四)显示模块显示模块用于显示测量结果,可以采用液晶显示屏(LCD)或数码管。
(五)电源模块电源模块为整个系统提供稳定的电源,包括 5V 和 33V 等不同的电压等级。
四、系统软件设计(一)主程序流程系统上电后,首先进行初始化操作,包括单片机的初始化、定时器的初始化、端口的初始化等。
然后进入主循环,不断地发射超声波脉冲,并等待接收回波。
当接收到回波后,计算距离,并进行显示或通信。
基于HC-SR04_模块的高精度超声测距系统
Science and Technology &Innovation ┃科技与创新2023年第17期·57·文章编号:2095-6835(2023)17-0057-03基于HC-SR04模块的高精度超声测距系统王永彬(临沂科技职业学院,山东临沂276000)摘要:研究设计了一种基于HC-SR04超声传感器、单片机和LCD1602液晶模块的超声波测距系统,并利用温度补偿算法和单片机门控触发精确定时中断技术进行测距修正,保证了不同温度环境下超声测距的高精度。
同时把测量结果实时显示在LCD1602液晶屏,并在达到设定安全距离时进行声音提醒报警或驱动执行机构动作,可广泛应用于生产线上的物品位置检测、汽车倒车距离安全提醒等场合。
关键词:超声测距原理;传感器;声速温度修正;液晶显示中图分类号:TP274.5文献标志码:ADOI :10.15913/ki.kjycx.2023.17.016在实际生产和生活中,经常需要对距离(位置)进行测量,以进行距离的直接提示,或者以距离为参量进行其他物理量的计算和控制,比如计算物体的速度。
测量距离的方法有很多种,总体上看有直接测量法(如利用尺子测量)和间接测量法(如激光测距、红外线测距、超声波测距等)2种。
由于超声波波束定向指向性强,在介质中传播时能量损耗比较小[1],特别是在空气、水中传播能达到较远的距离,因而适合利用超声波的这一特性进行距离的测量。
利用超声波测距的特点是测量过程迅速和方便,并且计算简单,测量精度高,因此被大量应用于工业场合,比如汽车的倒车雷达、移动机器人的位置确认等,都是超声波测距方式的典型应用。
1超声波测距原理超声波测距原理是利用超声波换能器的发射装置发出一定频率的超声波,超声波遇到障碍物时就会有反射波反射回来并被接收器接收,利用从发射到接收的往返时间差就可以进行距离测量,这与无线电雷达的测距原理很相似。
具体实现过程是:超声波模块的发射器向要进行测距的特定方向发射超声波,在发射开始的瞬间同步开始计时,如果没有障碍物,超声波在空气中会向前自由传播,当途中碰到障碍物阻挡时则会立即被反射回来,当反射波到达接收器时就立即停止计时操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
器仪 表专 业 , 学士 学位 , 获 副教 授 ; 主要 从 事测控技 术 方面 的研 究。 6 2
PROCES S AUTOM AT ON NS RUM ENTATI I I T ON k3 . e r a y2 1 Vo 3 No 2 F b u r 0 2
一
种高精度超声 波测距 系统 的设计
开 始
了1 个共射极放 大电路 , 以作 为受控 开关使 用。
初始 化
图 2 超 声 波 发 射 电路
F g 2 Ul a o i t n mi i g cr u t i. t snc r s tn i i r a t c
发送 7 0lz 个4 脉冲 t
采
( 南石 油 大学 电气信 息学 院 , 川 成都 西 四
李傻 兰
够 亮
胡 滑
60 4 ) 10 1
60 0 ; 150 中国石 油 集 团工程 设计 有 限 责任公 司西南分公 司 四川 成都 ,
摘
要 :随着控 制技 术研 究的不 断深 入 , 人们 对距 离 的测量要 求越 来 越高 。为 了 实现 对测 量 对 象距 离 的 实 时监 测 , 计 了一 种高 精 设
p itu ,a l a h o rno t swel ste c mmu iain b t e CU n o tc mp tra e i e ne nc t ewe n M o a d h s o u e r mplme td.Th y tm e tr se s ee t n,ra—i aa e s se fau e a e d tci o e t l me d t a q iio n r n miso c u st n a d ta s sin,lw ota d hg c urc . i o c s n ih a c a y Ke wo d y r s! Ditn e me s r me t Ulrs nc MCU La VI sa c a u e n ta o i b EW Hih p e iin g r cso
张
禾, 等
量 , 片 机根 据 距 离 自动 调 整超 声 波 频率 。 单
C 2 16 X 00 A是 日本索尼公 司生产 的彩 电专用 红外 遥控接收器 , 采用 单列 8脚 直插 式 , 小 型封 装 , 超 5V 供 电。当超声波接收探 头接 收到超 声波 信号 时 , 压迫 压 电晶片作振动 , 机械能 转化 成 电信 号 。红外 线检 将
0 引言
超声波在传输过程 中具有 不易受 干扰 、 能量消耗
送和接收声波的双重作用 。超声波传感器是利用压 电 效应 的原理将电能和超声波相互转 化 。
超声波测距系统组成如图 1 示 。 所
缓慢 、 在介质 中传播 的距离较远等优点 , 因而超声波经
常用 于距 离 的测 量 。 因为超声 波 测距 是 非接 触式 的 , 以它可 以在某些 特定场合 或环 境 比较 恶劣 的情 所 况下使用 。如在低渗气 藏微 流量监 测过程 中 , 需要 实 时对 井径进行测量 。超声波测距是一种非接触式距离 测量 的方法 , 随着虚拟仪器技术 的发展而发展 , 伴 它克 服了传统的测距方 式在井 下恶劣环境距离测量 中存在 的缺陷 。因此 , 结合 虚拟技 术研究超 声波 测距技 术具 有十分重要的现实意义。
2 硬 件 电路
2 1 温 度 检 测 .
超声波测距原理 的表达 式如下 :
波接 收集成 芯 片 C 2 16 X 00 A接到 电信号 后 , 所接 收 对
( )
{=5 61 r 0V 3.4 十0. S 31.T
=
到 的信号进行识别 , 频率 在 3 4 H 左 右 , 芯 若 8~ 0k z 则 片将输 出低 电平 , 否则将输 出高 电平 …。当接收 电路 输 出端产生负脉 冲时 , 片机 IT 端产 生一个 中断请 单 N
速作相应 的处 理 , 并对 最终测 试结果 进行校正 。
2 2 发 射 电路 设 计 .
超声波发射 电路 主要 由 5 5振荡器和 1 5 个共 发射 极放大 电路 构成 , 图 2所示 。5 5定 时 器为 一 多用 如 5 途模数混合集成 电路 , 本设计 利用 该特 点构 造 了多谐 振荡器 , 它能产生频率 为 4 H 的波形 。为 了提 高测 0k z 量精度 和单片机 的计 时精 度 , 5 5振荡器 后面 外加 在 5
3 软 件设 计
系统软件分为单片机软件和计算机软件两个部分 。 单片机软件使用汇编语言进行编写 , 主要实 现时间的测 量和距离 的计算功能 。计算机软件使用 L b IW 的图 aV E 形语言编程 , 实现数据的实时显示、 存储 和打 印等功 能。 主单片机软件程序 主要 由主程序、 温度采 集子程序 、 发 射子程序 、 计算 子程序、 部 中断子程 序和定 时器 中断 外 子程序组成 。主程序流程如 图4所示。
式中: 为超声波在 空气 中的传播 速度 , 0℃ 时 为 3 1 / 、5℃ 时 为 3 7 m s T为环 境 湿 度 。由此 可 3 s2 m 4 / ; 见, 声速 与温度有着密切关 系。实 际应用 中 , 如果 温度 变化不大且无特殊要求 , 可认 为声速基本不 变 , 否则必 须进行 温度补偿 。温度测 量主要采用测温 电路来实 ]
1 超 声测 距原理 及 系统组成
超声波是指 频率 高 于 2 H 的机 械波 。为 了将 0k z 超声波作 为 检 测 手段 , 须 产 生 超 生波 和 接 收 超声 必
波 。完成这种功能 的装置 就是超声 波传感 器 , 习惯
上称为超声波换能器或超声波探头 。超声波传感器分
为发送 器和接 收器 , 但一个超 声波传 感器也 可具 有发
ut snci ajs da tm t al ae nteds ne yuigL b E , h n t n fe li aadsly aas rg , lr n lao i s dut uo ai l b sdo it c.B s aVIW tef ci so a—medt i a ,d t t a e aam a d r e c y h a n u o r t p o
sse h sb e ein d wih te C8 51 st ec r. Co sd rn h mp c ftmpeau eo h l a o i eo iy,t y tm rc se ytm a e n d sg e t h 0 F a h oe n ie igt ei a to e rt r n te ut s n cv lct r hes se p o e s s te s u d v lct n a c r a c t h e e au e c a g s,a d ma e orcin o h n lts e ut. I d iin,te fe u n y o h o n eo iy i c o d n e wih t e tmp r tr h n e n k sc re to n te f a e trs ls n a dto i h rq e c f
中图分 类号 :T 2 P3
文献标 志码 :A
Absr c : Aln t h h ru h g ig rs ac n c nrltc n lg ta t o gwiht eto o g on e e r ho o to e h oo y,t efn t n l e ur me t f sa c a u e n r h u ci a q ie n so tn eme s r me tae muc ih r o r di h hg e .
将单片机的数据传输到计算机端 , 而且 能实现计算机对
单片机的控 制。由于计算机 的 串口是 R 一 2电平 , S2 3 而 单片机的串口是 m 电平 , 因此 , 要实现通信 , 两者之间 必须有一个 电平转换 电路 。本系统使用 的 串行通 信芯 片为 M X 22 在保持 R . 2 A 32 , S2 协议输出电平 的前提下 , 3 MA 32 X 22可确保 10ki s 2 t 的数据传输速率。 b/
求信号 , 单片机 响应外部 中断请求 , 执行外部 中断服务
子程序 , 读取 时间差 , 计算距离 。
2 4 串 口通 信 .
串口通信对单片机而言意义重大 , 其不但可 以实现
现, 设计 中采 用 铠装 L 3 M 5实 现 。温 度传 感器 将 测
得 的数据送人单 片机 , 片机 就会 根据 温度变 化对 声 单
籍
堡 皇 单 坚丝
篓
统
图 1 系 统 组 成 框 图
Fi 1 Blc a r m fs se c mp sto g. o k dig a o y tm o o iin
整个测距系统 以单 片机 为核心 , 系统开始 工作时 ,
由单片机发出一个控制信号去触发发射 电路 , 使发射 电
一
种 高精度超声波测距 系统的设计
张
Hale Waihona Puke 禾, 等 一种 高 精 度 超 声 波 测距 系统 的设 计
De in o gh Pr cso ta o i s a c e s r g S s em sg f Hi e ii n Ul s n c Dit n e M a u i y t r n
路起振 , 发生器产生振荡波 。电能的振荡波通过换能器 转变成机械能 的超声波 , 当超声波到达被测 目标时发生 反射 , 换能器根据压 电原理将超声波信号转换 为电能信 号 。信号经放大滤波 电路处理 , J 送至单片机 系统进行 时间的测量和距离 的计算 。单片机系统与计算 机之 间 进行 串口通 信 , Lb IW 软件程序对 计算机 接收 到 由 aVE 的数据进行处理 , 实现数据的实时显示 、 存储 、 报警 和打 印等功能 。为实现高精度测量 , 考虑温度对超声波 速