基于COSMOSMotion的3-PRRU并联机器人运动仿真
3-PRR并联机器人机构运动学建模与分析
3-PRR并联机器人机构运动学建模与分析
陈修龙;陈天祥;李跃文;蒙昭如
【期刊名称】《山东科技大学学报(自然科学版)》
【年(卷),期】2018(037)005
【摘要】对3-PRR并联机器人机构的运动学建模和运动特性进行分析研究.建立了机构的位置、速度、加速度运动学正解及反解的数学模型,得出特定轨迹下驱动杆的杆长、速度和加速度的变化曲线,利用ADAMS仿真验证了运动学建模的正确性;分析了机构在不同姿态下的工作空间;推导出机构的雅克比矩阵,据此分析了不同姿态下机构的条件数、最小奇异值、可操作性等特性.
【总页数】9页(P79-87)
【作者】陈修龙;陈天祥;李跃文;蒙昭如
【作者单位】山东科技大学机械电子工程学院,山东青岛266590;山东科技大学机械电子工程学院,山东青岛266590;山东科技大学机械电子工程学院,山东青岛266590;青岛大学数据科学与软件工程学院,山东青岛266071
【正文语种】中文
【相关文献】
1.新型3-PRRS 并联机构的位置正反解分析 [J], 郭宗和;杜晴晴;杨启志
2.新型3-PRRS并联机构动力学分析与控制策略 [J], 李瑞先;杜晴晴
3.平面3-RRR和3-PRR柔性并联机器人弹性动力学分析 [J], 张清华;张宪民
4.3-PPRR并联分拣机器人机构的运动学建模与仿真 [J], 王锦煜;马雪梅;陈安军
5.新型3-PRRS 农业并联机器人运动学及工作空间分析 [J], 杜晴晴;郭宗和;牛桂平
因版权原因,仅展示原文概要,查看原文内容请购买。
基于SolidWorks下cosmosmotion六自由度焊接机器人三维运动模拟

基于SolidWorks下cosmosmotion六自由度焊接机器人
三维运动模拟
侯祥明;张立祥
【期刊名称】《煤矿机械》
【年(卷),期】2007(28)9
【摘要】以六自由度机器人三维运动仿真为背景,介绍了利用SolidWorks下cosmosmotion实现机械手运动模拟的有效实体方法,重点分析了六自由度机器人的三维建模和建模后运动轨迹规划的实现。
对于一般的机械运动模拟系统,该实例具有一般普遍性。
【总页数】3页(P95-97)
【关键词】SolidWorks;cosmosmotion;三维运动模拟:轨迹规划
【作者】侯祥明;张立祥
【作者单位】安徽理工大学
【正文语种】中文
【中图分类】TP39
【相关文献】
1.基于ADAMS的六自由度焊接机器人运动学分析及仿真 [J], 余晓流;刘进福;汪丽芳;王伟;王殿君;孙丹
2.MATLAB环境下六自由度焊接机器人运动学逆解及优化 [J], 王战中;杨长建;刘超颖;赵赛;杜启鑫;熊蒙
3.基于虚拟样机的六自由度弧焊接串联机器人的运动仿真 [J], 曲令晋;王兴举;刘伟
4.基于MATLAB的六自由度焊接机器人的运动学仿真与轨迹规划 [J], 邢红辉;王保升;洪磊;左健民;石朗春
5.基于SolidWorks和ANSYS Workbench的六自由度焊接机器人的建模与优化设计 [J], 袁安富;陈成
因版权原因,仅展示原文概要,查看原文内容请购买。
3-RRRT并联机器人的动力学建模与仿真
3-RRRT并联机器人的动力学建模与仿真
李海刚;赵新华;徐鹏
【期刊名称】《天津理工大学学报》
【年(卷),期】2009(25)1
【摘要】本文简要介绍了一般并联机器人的特点,分析了3-RRRT并联机器人的构造,运用UG和ADAMS软件,建立了3-RRRT并联机器人的实体模型、运动学与动力学模型.并进行了仿真,最终得到机器人运动中各关节的角速度与力矩值.
【总页数】2页(P20-21)
【作者】李海刚;赵新华;徐鹏
【作者单位】天津理工大学机械工程学院,天津300384;天津理工大学机械工程学院,天津300384;天津理工大学机械工程学院,天津300384
【正文语种】中文
【中图分类】TP24
【相关文献】
1.3-RRRT并联机器人正向动力学仿真 [J], 刘延斌;韩秀英;薛玉君;贾现召
2.3-RRRT并联机器人运动仿真的SimMechanics实现 [J], 汪汇
3.基于牛顿-欧拉递推法的3-RRRT并联机器人动力学建模及仿真 [J], 姜园;赵新华;杨玉维;秦帅华
4.3-RRRT并联机器人动力学建模及其正向求解 [J], 刘延斌;贾现召;赵新华
5.3-RRRT并联机器人传动性能分析及运动仿真 [J], 徐鹏;赵新华;李海刚
因版权原因,仅展示原文概要,查看原文内容请购买。
可变换3PRS并联机构的运动学及动力学仿真研究
2 运动学分析
2.1 逆向运动学分析
可变换3-PRS并联机构具有3个自由度,因此,并联 机构的位姿独立参数有3个,在该并联机构中,其逆向 运动学就是给定末端执行器的位姿zT、α和β,求解驱 动滑块位置H1、H2和H3。欧拉角(Euler)是用来唯一 地确定定点转动明体位置的三个一组独立角参量,在并 联机构中,我们可以用欧拉角和动坐标系原点位置来描 述该机构动平台的位姿。这里设动坐标系OT=xyz绕定坐 标系O-XYZ的X轴、Y轴、Z轴的的旋转角度分别为α、
(1.河南理工大学 机械与动力工程学院,焦作 454003;2.河南理工大学 财经学院,焦作 454003)
摘 要:以可变换3-PRS并联机构为研究对象,概述了该并联机构的结构形式,分析了该并联机构的逆
向运动学和正向运动学。利用动力学仿真软件ADAMS建立了该并联机构的仿真模型,并进行
了该并联机构的正向运动学、逆向运动学和动力学仿真分析,获得了该并联机构的运动学和
收稿日期:2018-04-29 基金项目:国家自然科学基金项目(U1304525);河南省科技厅科技攻关项目(172102310664);河南省高校基本科研
业务费专项资金资助项目(NSFRF170913);河南理工大学博士基金(B2018-18) 作者简介:孙付伟(1981 -),男,河南商丘人,讲师,博士,主要从事机械工程及并联机器人技术教学与研究工作。
随着工业技术的发展,并联机构的应用越来越广 泛,相比于串联机构,并联机构具有运结构紧凑、运动 惯性小、误差累计小、承载力大等有点[1,2]。以Stewart 为基础的6自由度并联机构已经广泛应用于航空航天和 工业生产中,近年来,少自由度并联机构或混联机构在 工业生产中的应用也越来越多,而它所具有的运动的特 性也成为学者的研究热点[3~6]。与串联机构类似,并联 机构也存在者正向运动与逆向运动的求解计算问题,需 要建立相应的数学模型,这也是对少自由度并联机构的 误差分析、动力学分析等问题解决的基础[7~9]。ADAMS (Automatic Dynamic Analysis of Mechanical Systems) 是世界上应用最广的一种机械系统动力学仿真分析软 件,它能够实现仿真分析复杂机械系统的运动学和动力 学性能,仅需几个小时就可以知道各种设计方案的样机 是如何工作的,大大提高了工作效率[10,11]。本文以一种
毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]
![毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]](https://img.taocdn.com/s3/m/3ad4a49648d7c1c709a145a5.png)
毕业设计(论文)题目:空间3-RPS并联机构的运动分析与仿真题目类型:论文型学院:机电工程学院专业:机械工程及自动化年级:级学号:学生姓名:指导教师:日期: 2010-6-11摘要3-PRS并联机构是空间三自由度机构,该机构具有支链数目少、结构对称、驱动器易于布置、承载能力大、易于实现动平台大姿态角运动等特点,目前已在工程中得到成功应用。
本文基于空间机构学理论,对3-RPS并联机构进行了相关的运动学分析。
在对机构结构分析的基础上,对机构的输出位姿参数进行了解耦分析,得到了机构输出参数间的解耦关系式;用解析法推导了机构的位置反解方程;用数值法实现了机构的位置正解;依据驱动副行程、铰链转角、连杆尺寸干涉等限制因素确立约束条件,利用极限边界搜索算法搜索了3-PRS并联机构的工作空间,分析了该机构工作空间的特点,并进行了工作空间体积计算。
最后基于ADAMS软件平台,建立了3-RPS并联机构的三维实体简化模型,对3-RPS并联机构的运动进行了仿真。
本文的研究为3-RPS并联机构的结构设计与应用提供了参考。
关键词:3-PRS并联机构;位置正解;位置反解;工作空间;运动仿真ABSTRACT3-PRS parallel mechanism is a three degrees of freedom of space agencies, the agency has a small number of branched-chain, structural symmetry, the drive is easy layout, carrying capacity, easy to implement a large moving platform attitude angle motion and other characteristics, has been successfully applied in engineering . Based on the theory of space agencies, on the 3-RPS parallel mechanism was related to kinematics analysis. In the analysis of the structure, based on the position and orientation of the body of the output parameters of the decoupling analysis, the decoupling of the output parameters of the relationship; analytic method derived by inverse position equations institutions; achieved by numerical methods body forward position; based driver Vice trip, hinge angle, rod size interference and other constraints set constraints, using the limit boundary search algorithm for searching for the 3-PRS parallel mechanism of the working space, analysis of the sector space characteristics, and a working space of volume. Finally, based on ADAMS software platform, the establishment of the 3-RPS parallel mechanism of three-dimensional solid simplified model of 3-RPS parallel mechanism of the movement is simulated. This study for the 3-RPS parallel mechanism structure provides a reference design and application.Key word: 3-PRS parallel mechanism; forward position;inverse position;workspace ;motion simulation.目录摘要IIABSTRACT III前言VII第1章绪论1课题研究的意义 1并联机构简介 2并联机构的国内外发展现状 3少自由度机构介绍 6少自由度的研究意义 6少自由度并联机构的研究现状 (6)本文主要研究内容7第2章并联机构的组成原理及运动学分析 (9)引言9并联机构自由度分析9并联机构的组成原理10并联机构的研究内容11运动学分析11工作空间分析12本章小结13第3章3-PRS并联机构位置分析14引言14空间3-RPS并联机构14机构组成143-RPS并联平台机构的位姿描述 (15)3-RPS并联平台机构位姿解耦 (19)3-RPS并联平台机构的位姿反解203-RPS并联平台机构的位置正解23本章小结:25第4章3-RPS并联机构的工作空间分析 (26)引言263-RPS并联平台机构的工作空间分析 (26)机构的运动学约束263-RPS并联机构工作空间边界的确定 (28)工作空间分析算例29工作空间体积的计算方法29本章小结30第5章3-RPS并联机构的仿真与应用 313-RPS并联机构的的三维建模31ADAMS软件介绍313-RPS并联机构的建模313-RPS并联机构的运动仿真323-RPS并联机构的应用34本章小结37总结与体会38谢辞39参考文献40前言机构的发明与发展同人类的生产、生活息息相关,它促进着生产力的发展、生产工具的改进和人类生活水平的不断提高。
基于COSMOSMotion与MATLAB的机器人运动学仿真
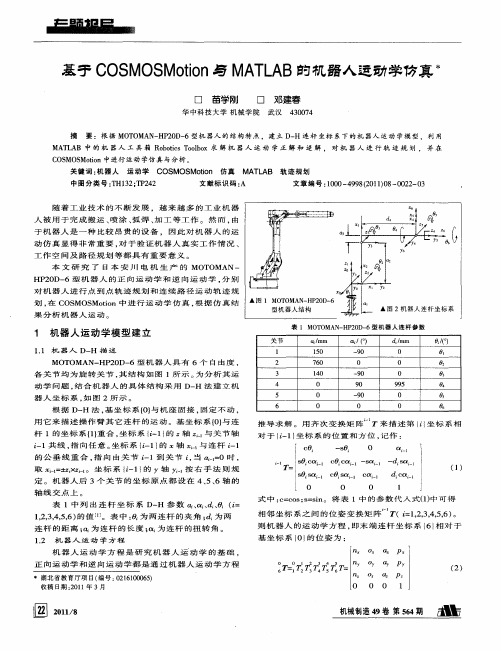
随 着 工 业 技 术 的 不 断 发 展 .越 来 越 多 的 工 业 机 器 人 被用 于完 成搬 运 、 涂 、 焊 、 工 等工 作 。然 而 , 喷 弧 加 由 于 机 器 人 是 一 种 比 较 昂 贵 的设 备 。 因 此 对 机 器 人 的 运 动 仿真 显得 非 常重 要 , 于验 证机 器 人 真实 工作 情况 、 对 工 作空 间及 路径 规 划等都 具 有重要 意 义 。 本 文 研 究 了 日本 安 川 I电 机 生 产 的 M0T OMAN— HP 0 6型 机 器 人 的 正 向 运 动 学 和 逆 向 运 动 学 , 别 2 D一 分 对 机 器 人 进 行 点 到 点 轨 迹 规 划 和 连 续 路 径 运 动 轨 迹 规 划 , COS 在 MOS t n 中 进 行 运 动 学 仿 真 , 据 仿 真 结 Moi o 根
0
.
P a Py y P:
0
一
_ 一 3 4 5 l 2
。
r4
( 2)
0
0 O
1
2)1 8 1 / 1
机械制造 4 卷 第 54 9 6 期
0 0
d 3/ l (0
一
0
l
式 中 : ̄ o ;= i 。 将 表 1中 的 参 数 代 入 式 () 可 得 e e s s sn 1中
123456 的 值 [ 表 中 : 为 两 连 杆 的 夹 角 ; 两 ,,,,, ) 。 d为 连 杆 的 距 离 ;4 连 杆 的 长 度 ; 为 连 杆 的 扭 转 角 。 o为
机 器人 运 动 学 方 程是 研 究 机 器人 运 动 学 的基 础 . 正 向 运 动 学 和 逆 向 运 动 学 都 是 通 过 机 器 人 运 动 学 方 程
基于符号运算的3-PRS并联机器人速度运动学分析

基于符号运算的3-PRS并联机器人速度运动学分析康件丽;陈国强;赵俊伟【期刊名称】《机床与液压》【年(卷),期】2014(000)021【摘要】在3-PRS并联机器人设计与控制过程中,求解其输入与末端位姿之间速度及加速度的传递关系是工作重点,但该解析表达式比较复杂。
通过直接采用对时间求导数的方法,得到3-PRS并联机器人速度运动学的解析表达式。
针对推导复杂的问题,利用MATLAB提供的符号推导函数,直接求得输入输出间速度与加速度关系表达式中矩阵的解析表达式;用替换函数将变量替换为具体的数值得到最终的数值解。
给出了具体计算程序,最后用算例验证了该方法的可行性及程序的有效性。
结果表明:采用MATLAB的符号推导功能,可以方便地用解析法及数值法对3-PRS的速度运动学进行研究。
%The transmission relationship of velocities and accelerations between the input parameter and end orientation of manip-ulator is one key task in design and control process of 3-PRS parallel robot,but the analytic expression is rather complex. The velocity kinematics analytic expression of 3-PRS parallel robot was gotten through directly using the method of differentiating with respect to time. Aiming at complexity problem of derivation,the analytic expression of matrixes in the expression of transmission relationship of velocities and accelerations between input and output was gotten directly using the symbolic derivation function provided in MATLAB. The final numerical solution was gotten by replacing all the variables with actual values by using replacingfunction. The detailed calcu-lation program was presented,and the feasibility of the method and the effectiveness of the program were verified through computing ex-amples finally. The result shows that using the symbolic derivation computation functions of MATLAB can facilitate study on velocity ki-nematics of 3-PRS parallel robot using analytic and numerical method.【总页数】5页(P28-32)【作者】康件丽;陈国强;赵俊伟【作者单位】河南理工大学,河南焦作454003;河南理工大学,河南焦作454003;河南理工大学,河南焦作454003【正文语种】中文【中图分类】TP242.2【相关文献】1.基于虚拟样机的倾斜导轨式3-PRS并联机器人的设计与分析 [J], 黄秀琴;潘晨2.基于蒙特卡洛方法的3-PRS并联机器人误差分析 [J], 康件丽;陈国强;赵俊伟3.3-PRS并联机器人惯量耦合特性研究 [J], 王冬;吴军;王立平;刘辛军4.3-PRS并联机构运动学分析 [J], 夏广岚;胡晓平;赵国福;李兵5.3-PRS并联机器人概念设计与运动特性研究 [J], 汤腾飞;张俊因版权原因,仅展示原文概要,查看原文内容请购买。
新型球面3rrr并联机器人的构建及其性能
结构设计
01
结构设计
新型球面3rrr并联机器人采用独特的三环三杆结构,具有高刚度、高精
度和良好的动态性能。通过优化设计,实现了轻量化、紧凑化的结构特
点,便于搬运和安装。
02
运动学分析
基于并联机器人运动学理论,对新型球面3rrr并联机器人的运动学特性
进行了详细分析。通过建立运动学模型,对其工作空间、奇异性、运动
新型球面3rrr并联机器人的构 建及其性能
汇报人: 2024-01-03
目录
• 新型球面3rrr并联机器人简介 • 新型球面3rrr并联机器人的构
建 • 新型球面3rrr并联机器人的性
能
目录
• 新型球面3rrr并联机器人的优 势与局限性
• 新型球面3rrr并联机器人在实 际应用中的案例
01
新型球面3rrr并联机器人简介
材料加工
根据结构设计的要求,对所选材料进行精密加工,确保各部件的尺寸和形位公 差符合设计要求。对于关键承重部件,采用先进的热处理工艺以提高其机械性 能。
制造工艺
制造工艺
采用先进的数控加工中心进行精密加工,确保各部件的制造 精度。关键承重部件采用焊接工艺进行组装,以提高整体结 构的稳定性。在装配过程中,采用高精度测量仪器进行检测 ,确保机器人的装配精度。
汽车工业
可以用于汽车车身焊接、零部 件装配等生产线上,提高生产 效率和产品质量。
医疗器械
由于其高精度和高稳定性的特 点,可以用于手术机器人、康 复机器人等领域,提高医疗服 务的水平。
其他领域
新型球面3rrr并联机器人还可以 应用于智能制造、物流运输、 服务等领域,具有广泛的应用 前景。
02
新型球面3rrr并联机器人的构建
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3自由度 [ P S类 并 联机 器人 , 括 3RP ,- R ,- P P] 包 - S 3P S 3P S等构 型[ , 2 除具 备 少 自由度 并 联机 构 的特 性 ] 外 , 具有 非 常适合 工程 应用 的 l移动 、 动 的 3自由度 特 点 , 还 2转 已在 各 个 领域 得 到 了广 泛 应 用 。如微 动 机
机构 进行 结构 优化 都有 十分 重要 的意 义 。
本文 以结 构简单 、 伴 随运 动的新 型 3自由度 3P U 并联 机器 人一] 无 - RR 为研究 对象 , 建立 机 构数 学模 型 , 通过 S l Wok 软 件构 建虚 拟样机 , 用 运 动 学分 析 软件 C S oi r s d 采 O MOS t n进 行运 动 轨 迹 仿 真 , Moi o 有效 验 证 机构 位置 反解 的正 确性 , 以后 的机构 学分 析 和结 构优化 提供 了参 考依 据 。 为
和 结 构 优 化 提供 了参 考 依 据 。
关 键 词 :并联 机 器人 ;位 置 反 解 ;虚 拟 样机 ; ( M(S t n C) S )Moi o 中图分类号 : TH12 1 文 献 标 识 码 :A
0 引 言
并联机构具有高精度 、 高刚度 、 承载能力大和运动反解简单等特点 , 成为机器人 学者的研究热点u 。 自由度小 ] 于 6的少 自由度并联机构 , 因其驱动部件少 、 结构简单 、 控制成本低等特点 , 近年来引起相关学者 的高度关注 。
个 U 铰 中心点 共线 , 过改 变各 分支 中移 动副 P的移 动量 , 实 现 动平 台在 空 间一 定 范 围 内不 同位 置 和姿 通 来
态 的变化 。
收稿 日期 :2 1 — 0 — 2 00 3 9 基 金 项 目:国 家 自然 科 学 基 金 (0 0 1 7 ; 江 省 自然 科 学 基金 ( 0 0 3 ) 5 9 5 6 )浙 R19 l 4 作 者 简介 :张 铁 牛 ( 9 5 )男 。 北 邯 郸 人 , 士研 究 生 , 18 一 , 河 硕 主要 从 事并 联 机 器 人 理 论 和 技 术 研 究 。
的运 动控制 。但 只凭 借计 算数 据很 难直 观地 判 断机 构动平 台的位置 和姿 态 , 机构 的奇异 位形 、 结构 干涉 等 问
题 。因此 , 过建立 虚 拟样机 , 机构进 行 运动仿 真 , 通 对 从而 验 证数 学 模 型 的正 确性 , 视 化 工作 空 间 , 可 以及 对
浙 江理 工 大学 学报 , 2 第 7卷 , 6期 ,0 0年 l 第 21 1月
J u n l fZh ja g S i c ie st o r a ein c Te h Unv r iy o
Vo . 7 I2 ,No 6 . ,NO . 2 1 V 00
文 章 编 号 :17 —8 1(0 0 6 0 8 4 6 3 3 5 2 1 )0 —8 5 0
器人 _ 、 动模 拟装 置_ 、 术机 器人 l 等 , 其 是 在 机 床 行业 的应 用 , 3运 ] 4手 ] 5 尤 比较 典 型 的有 西 班 牙 F to i 司 arnk公 研 制 的 H5 工机 床[ 和德 国 D c n lge 司研 发 的五轴 卧式 加工 中心 [ 等 。对 于E P S类 并联 机构 加 6 STeh oo i公 7 ] P]
1 3P R . R U并 联 机 构
3P RU 并联 机器 人是 一个 移动 、 R 两转 动 3自由度 并 联机 构 , 由动 平 台 、 平 台 以及 连 接 动 平 台和 定平 定
台 的分支 等组 成 。3条 P U 分 支 , 构完 全相 同 , 呈 “ ” 形 分布 , 中 3个 分支 中与 动平 台相 连 的 3 RR 结 并 丁 字 其
基 于 C M S oi OS O M t n的 3P R o 一 R U并 联 机 器 人 运 动 仿 真
张铁 牛 ,陆 中 平 陈 巧 红 , ,李 秦 川 ,武传 宇 胡 旭 东 ,
(.浙 江 理 工 大 学浙 江 省 现 代 纺 织装 备 技 术 重 点 实验 室 ,杭 州 30 1 ; 1 10 8 2 .杭 州娃 哈 哈 集 团 有 限 公 司精 密 机械 制 造 公 司 , 州 3 0 1 ) 杭 10 8
的理 论研究 , 括位 置正 反解 _ 、 作空 间 ]奇异 位形 l] 包 8工 ] 。、 l 和机 构优 化口 _ 方 面 , 断 出现 新 的研究成 果 。 ( ) l 等 不 位置反 解是 并联 机 构运 动学研 究 的基础 , 映 了输入 输 出之 间的非线 性 映射关 系 , 反 直接影 响对 并联 机构
86 8
浙
江
理
工
大
学
学
报
21 0 0年
第 2 卷 7
2 机构 数 学 模 型
3P RU机 构简 图如 图 1所示 。△ -R A A A。为定 平 台 , 定 坐 标 使
系 0{ Y } , , 固结 于定平 台的 A 中点 处 ; A o O 方 向, A (一 T沿 A 有 ) O 一口 j沿 O 方 向 , A3 A2 ; , A3 O 一 , A。L A2 O _AI 。3个移动输 人 d 垂 直 于定平 台 , 使动坐 标系 P{ , ∞} U , 固定于 动平 台 A 。的中心 C , C CC 。 由机构 自由度 可 知 , 。点 被 限 制 在 轴 上 运 动 , 其 坐 标 为 ( 、 、 C 设 0 0
摘
要 :为 实 现 3P R 并 联 机 器人 运 动 的 可视 化 , 用并 联 机 器人 机 构 学理 论 , 立 了 3P R 机 构 的位 置 -R U 应 建 -R U
反 解 方 程 , 而得 出 了并联 机 构 工 具 末 端 的 运 动 方 程 , 用 S l W ok 进 运 oi d rs建 立 了 3P RU 并联 机 构 的 虚 拟 样 机 , 利 -R 并 用集成的 C S O MOS t n软 件 对 机 构 进 行 了运 动 仿 真 , 真 结 果 验 证 了理 论 分 析 的 正 确 性 , 为后 续 的 轨 迹 规 划 Moi o 仿 并