机电控制作业 开关磁阻电机及matlab仿真
基于Matlab的开关磁阻电机控制系统仿真建模研究

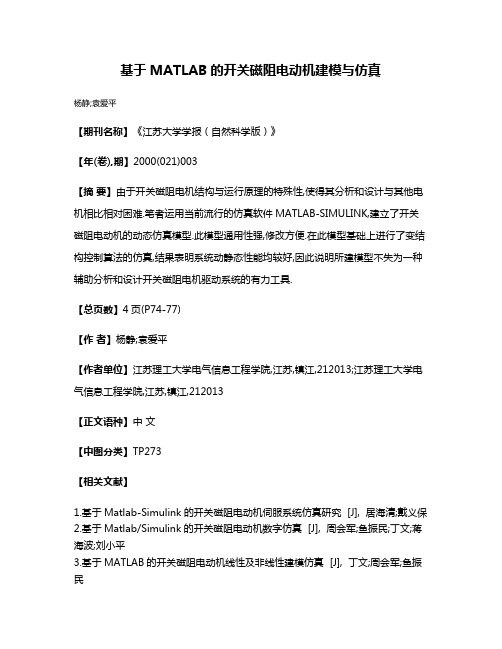
Reference speed
Speed controller io*
PI controller
Current co n tro l l e r
speed
p o si ti o n
Current controller
Angle sel e cti on Angle selection
i a,i b,i c
1 SRM 的数学模型
6/4 三相 SRM 是一个高阶、非线性、强耦合的多变量 系统,绕组电流的非正弦与铁心磁通密度的高饱和是 SRM 运行的两大特点[7]。为了便于分析,假定:
·1016·
系统仿真学报
Vol. 17 No. 4 Apr. 2005
(1) 三相绕组对称,每相的两个线圈作正向串联,忽略
效性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:开关磁阻电机 (SRM);仿真建模;Matlab;角位置控制 (APC);电流斩波控制 (CCC)
文章编号:1004-731X (2005) 04-1015-07
中图分类号:TM352
文献标识码:A
Study on Modeling and Simulation of Switched Reluctance Motor Control System Based on Matlab
2.2 速度控制模块
为实现 SRM 性能的快速预测与优化设计,本文在分析 SRM 数学模型的基础上,借助于 Matlab 强大的仿真建模能 力,利用 Simulink 中内含的功能元件,提出了一种基于 Matlab/Simulink 建立 SRM 控制系统仿真模型的新方法,有 效克服了现有 SRM 建模方法存在的不足。其基本思想是: 将 SRM 电 机 控 制 系 统 的 功 能 单 元 模 块 化 , 在 Matlab/Simulink 中建立独立的功能模块:SRM 本体模块、 速度控制模块、电流控制模块、转角选择模块、参数计算 模块等,将这些功能模块进行有机整合,即可搭建出 SRM 控制系统整体设计的仿真模型。其中,速度环中采用 PI 控 制 , 电 流 环 中 将 角 位 置 控 制 ( APC ) 与 电 流 斩 波 控 制 (CCC)相结合,以保证电机高速、低速运行时都有理想 的控制性能。该方法思路清晰,实现便捷,效果理想,仿 真结果证明了该种建模方法的快速性和有效性。
基于MATLAB的开关磁阻电动/发电系统的建模与仿真

动汽车的电动/ 回馈制动系统和航空领域 中的起
动/ 发电系统 。 由于开关磁阻电机 ( R 但 S 电机 ) 磁
路的非线性 , 在运行期间其绕组电感不是常数 , 而是电流和转子位置角的复杂函数, 难以用解析 式来表达 , 因此在研究S R电机 电动/ 发电系统 的 控制方法时, 建立一个能很好反映系统实际工况 的非线形模型是十分必要的【 】 。 0
化阶段 是十分方便 和直观的。 本文 首先 对s I 中的相关模块 建立开关磁 阻电机 电动 / 电系统 的非线性 仿真模 型。 发 该模 型具 有仿真便 捷 , 结 果直观等 特点 。 利用该模 型对一 台三相 l/结构样 机进 28 行了仿 真 , 仿真结 果证 明了该模 型 的有效 性 。 该模 型 为 今后优化开 关磁 阻电机 的控制策略提供了依据 。 关键词 : 开关磁 阻电机 电动/ 发电系统 仿真建模
M o o / ne a o y t m s d o t rGe r t rS s e Ba e n MATL AB
Zha g i Zh g  ̄h n n Le an ua g
Be i a tn ies y inJ oo gUnv ri j i t
摘
要: 基于 开关磁 阻电机 的数学模 型 , 利用MA 。 T
g n r t rs se e e a o y t m M o e i g a d smu a i n d l n i lt n o
开关磁阻 电机电动/ 电系统容错性 强 、 发 控
制灵活、 方便 实现 四象限运行, 非常适合作为 电
() 1 主开关元件和续流二极管开通 、 关断无 过渡过程 , 管压降为零 :
基于MATLAB的开关磁阻电机的噪声问题仿真研究的开题报告

基于MATLAB的开关磁阻电机的噪声问题仿真研究的开题报告一、研究背景及意义开关磁阻电机是一种新型的电机,它具有结构简单、无刷、低噪声、高效率等优点。
尤其是在噪声方面,开关磁阻电机较传统电机(如感应电机、永磁同步电机等)具有更低的噪声水平,成为新能源汽车、家电等领域的研究热点。
因此,开展开关磁阻电机的噪声研究对推动新能源领域的应用具有重要意义。
在开关磁阻电机的研究中,噪声问题一直是一个难点。
目前,在实际应用中发现,开关磁阻电机的噪声问题比较严重,需要进行深入的研究。
而研究开关磁阻电机的噪声问题,需要从其运行机理、噪声来源、噪声管控等方面进行探讨。
二、研究目标本研究基于MATLAB,通过仿真分析开关磁阻电机的运行过程,在此基础上探讨该类型电机的噪声问题,并提出有效的噪声管控方案,以实现电机的低噪声运行。
三、研究内容1.分析开关磁阻电机的运行过程,建立相应的数学模型;2.利用MATLAB软件对电机的运行过程进行仿真分析,探讨电机噪声来源;3.对电机的噪声进行定量评估,建立完整的噪声管控体系;4.评估噪声管控方案的有效性,提出实践指导建议。
四、研究方法与技术路线1.理论研究:阅读相关文献,深入掌握开关磁阻电机的运行原理、噪声来源等基本知识;2.数学建模:利用基本理论知识,建立开关磁阻电机的数学模型;3.仿真分析:基于MATLAB平台,进行电机的运行仿真分析,探讨电机噪声产生原因及机理;4.噪声管控:建立电机噪声管控方案,对其有效性进行评估;5.实践建议:针对实际应用中遇到的问题,提出相关解决方案和建议。
五、研究进度安排第一阶段(1-2个月):对开关磁阻电机及其噪声问题进行文献调研,深入了解相关背景知识。
第二阶段(2-3个月):基于开关磁阻电机的运行原理建立相应的数学模型,利用MATLAB进行仿真分析,探讨噪声问题的来源及机理。
第三阶段(2-3个月):建立电机噪声管控体系,对管控方案进行评估,提出实践建议。
基于MATLAB的开关磁阻电动机控制仿真

2004 年第 4 期 (总第 121 期) 2004 年 11 月 15 日 出 版
( EXPLOSION -
PROO F
EL ECTR IC MACHIN E)
防爆电机
L (θ,i) =
L min
L min + K (θ- θ2) L min + K (θ- θ2) i1/ i
采用电流斩波控制 ,开通角 θon固定为 0°,关 断角θoff固定在 θr/ 2 (θr 为电机转子周期角) , 电 机运行时 ,当电流超出设定限值时 ,功率变换器主 开关被强迫关断 ,当电流下降一段时间 ,低于限值 后再导通 。通过设置不同的电流斩波限可得到相 应的系统机械特性[5 ] 。
5 系统仿真
1. 电动机负载过大或被卡住 2. 电源未能全部接通 3. 电压过低 4. 对于小型电动机 ,润滑脂硬 或装配太紧
1. 电源线与接地线搞错 2. 电动机绕组受潮 ,绝缘严重 老化 3. 引出线与接线盒接地
处 理 方 法
1. 检查设备 、排除故障 2. 更换熔断器的熔体 ;紧固接线柱松动的螺钉 ;用万用表检查 电源线的断线或假接故障 ,然后修复 3. 如果 △联结电动机误接成 Y 联结 ,应改回 △联结 ,电源电压 太低时 ,应调整供电电源 ;电源线压降太大造成电压过低时 ,应 改成粗电缆 4. 选择合适的润滑脂 ,提高装配质量
关键词 开关磁阻电动机 模型 PWM 仿真
Controlling Simulation of Switched Reluctance Motor Based on MATLAB Xiao Fang
Abstract The const ruction and operation principle of t he Switched reluctance mo2 tor is special , so analysis and st udy of it is more difficult t han ot her motors. The quasi2 linear simulation model of t he switched reluctance motor is established by MA TLAB2 SIMUL IN K. The simulation of PWM cont rolling algorit hm is carried out on t he basis of it . The rest ult shows t hat bot h t he dynamic and static performances of t he system are very good.
基于MATLAB的开关磁阻电动机建模与仿真
基于MATLAB的开关磁阻电动机建模与仿真
杨静;袁爱平
【期刊名称】《江苏大学学报(自然科学版)》
【年(卷),期】2000(021)003
【摘要】由于开关磁阻电机结构与运行原理的特殊性,使得其分析和设计与其他电机相比相对困难.笔者运用当前流行的仿真软件MATLAB-SIMULINK,建立了开关磁阻电动机的动态仿真模型.此模型通用性强,修改方便.在此模型基础上进行了变结构控制算法的仿真,结果表明系统动静态性能均较好,因此说明所建模型不失为一种辅助分析和设计开关磁阻电机驱动系统的有力工具.
【总页数】4页(P74-77)
【作者】杨静;袁爱平
【作者单位】江苏理工大学电气信息工程学院,江苏,镇江,212013;江苏理工大学电气信息工程学院,江苏,镇江,212013
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于Matlab-Simulink的开关磁阻电动机伺服系统仿真研究 [J], 居海清;戴义保
2.基于Matlab/Simulink的开关磁阻电动机数字仿真 [J], 周会军;鱼振民;丁文;蒋海波;刘小平
3.基于MATLAB的开关磁阻电动机线性及非线性建模仿真 [J], 丁文;周会军;鱼振民
4.基于Matlab的开关磁阻电动机驱动系统非线性建模仿真 [J], 嵇丽丽;陈昊
5.基于MATLAB/Simulink的开关磁阻电动机调速系统的建模与仿真 [J], 王巧花;叶平
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MATLAB的开关磁阻电机非线性建模仿真

D事/I器耀
以 以 以 以 以
o≥、帮褪 v,煺锄
图3
Fig.3
磁链/电流/转子位置角关系图
ReIationship of flux linkage,current and rotOr position
一g
N)、墩寺毒
f,s
图5
A相磁链、电流、转矩仿真波形
Flux Hnkage,current and torque 0f
万方数据
・68・
电力系统及其自动化学报
2006年2月
哕为相绕组的磁链。当排除了饱和和互感的影响, SRM的相磁链是转子位置和相电流的函数,每一 相的磁链可由线性方程(2)得到
缈(口,J)=L(曰)J (2)
彬(,,咿)+Ⅳ(9,口)≥妒J
(5)
由于SRM的双凸极结构,其磁场能量是变化 的,因此产生转矩。由能量函数对转子位置的偏微 分可获得电机转矩r为
current
analysis and designing of
Key words:switched reluctance
contr01(CCC);simulation;nonlinear
1
前言
开关磁阻电机(SRM)具有结构简单、成本低、
各单元模块化,再将这些模块有机结合,即可搭建 出开关磁阻电机系统的非线性模型。因此本文所建 立的模型可以扩展成任意相开关磁阻电机系统的 仿真模型,为分析和设计开关磁阻电机控制系统提 供了有效的手段。
on】Ⅵatlab/Simulink
on
environment[J].IEEE
Electronic
ห้องสมุดไป่ตู้
Trans
Aerospace
基于MATLAB 的开关磁阻发电机非线性建模与仿真

基于MATLAB的开关磁阻发电机非线性建模与仿真胡鹏,杨玉岗,高奇(辽宁工程技术大学电气与控制工程学院, 葫芦岛125105;)摘要:基于开关磁阻电机的非线性数学模型,利用Matlab/Simulink中的相关模块建立开关磁阻电机发电系统的非线性仿真模型。
利用该模型对一台三相12/8结构样机进行了仿真,仿真结果证明了该模型的有效性。
首先采用传统的PID控制建模,后设计了带有修正因子的模糊PID控制器,提高了系统的稳定性,改善了动态性能。
仿真试验表明开关磁阻发电系统能够稳定地发出电压为220V的直流电。
关键词: 开关磁阻发电机;模糊控制;仿真;非线性电感;Study on Nonlinear modeling and Simulation of The Switched Reluctance Generator Using Matlab softwareHu Peng, Yang Yu Gang,Gao Qi(Liaoning Technology University; College of Electrical and Control; Hulu dao 125105; China)Abstract:Based on the mathematical model of switched reluctance motor,a nonlinear modeling of switched reluctance generator is built up using relative blocks of Matlab/Simulink. A 3-phase 12/8 structure prototype SRM is simulated using the proposed mode1. the effectiveness of the model is demonstrated by the simulation result.Firstly,the traditional PID is used for this model,then designing the fuzzy controller with the correction factor adds to the PID model, This improves the system stability and dynamic performance. The simulation showed that SRG power generating system can stabilized issue the voltage of 220 VDC.Key words: switched reluctance motor;fuzzy control;simulation;nonlinear inductance;1 引言21世纪将进入风能发展的高速阶段,风力发电作为不受地域限制、可持续开发、不污染环境的理想能量来源从1978至今的二十五年中,得到了大力开发,并不断向多元化,设备大型化、实用化、高效化,成本的低廉化方向发展。
开关磁阻电机matlab程序设计

开关磁阻电机设计程序%开关磁阻电机设计程序%%电机给定数据:功率7.5KW,电源电压380V,额定转速1500r/min,额定效率0.88,%调速范围200——2000r/min,4相8/6极结构。
%clear allformat short e%1.功率,转速PN=7.5*10^3;n=1500;%2.相数q=4;%3.定子极数、转子极数Ns=8;Nr=6;%4.绕组端电压(单位V)U=280;%5.主要尺寸选择,电磁功率eta=0.88;Pem=PN*((1+eta)/(2*eta));%6.细长比lambda=1.2;%7.电磁负荷初选值A1=28000;Bdelta1=0.4;%8.转子外径Daki=0.5;km=0.8;Da=6.1/(Bdelta1*A1)*(ki/km)*(Pem/n)/(1.05*lambda);Da=Da^(1/3);%9.铁芯叠长la=0.1355;%10.定子外径Ds=0.21;%11.气隙g=0.0004;%12.定转子极弧betas=21*pi/180;betar=23*pi/180;%13.定转子极宽bps=(Da+2*g)*sin(betas/2);bpr=Da*sin(betar/2);%14.第二气隙,设%%%%%%%%%%%% 此处可以输入数值 %%%%%%%%%%%%%%%%%%%例如:gi=input('输入第二气隙gi=')gi=0.01615;%15.定转轭高hcs=1.3*bps/2;hcr=1.4*bpr/2;%16.轴径。
%%%%%%%%%%%% 此处可以输入数值 %%%%%%%%%%Di=0.05;%17.定子槽深ds=(Ds-Da-2*g-2*hcs)/2;%19.有效铁芯长度kFe=0.93;lFe=kFe*la;%20.转子极距taur=pi*Da/Nr;%21.控制参数。
开通脚,关断角,导通角thetaon=0;thetau=0;thetaoff=(1/2)*(2*pi/Nr-betar)+thetau;thetahr=thetaoff;thetac=thetaoff-thetaon;%22.每相绕组串联匝数,取Bps=1.6T,重新校验BdeltaBps=1.6;ldelta=1.05*la;Bdelta=0.805*bps*Bps/taur;Nph=3.04*Nr*U*thetac/(n*Bdelta*Da*ldelta);%%%%%%%%%%%% 此处可以输入数值 %%%%%%%%%%%23.磁化曲线计算,选择DR510-50硅钢片冲片,delta=0.0005,计算机计算得:%不对齐位置电感Lu=0.00918; %%%%%%%%%%%% 此处可以输入数值 %%%%%%%%%%%25.额定电磁转矩omega=2*pi*n/60;Tem=Pem/omega;%26.额定电磁转矩Tem所需的理想方波电流幅值Ims%在图6-17中,取Ims=28A时,W1=13.61J,Ims=28;W1=13.61;Tem1=Ns*Nr*W1/4/pi; %%%%%%%%%%%% 此处可以输入数值 %%%%%%%%%%%27.绕组电流有效值I=Ims/(2^(1/2));%28.实际电流峰值ki=0.5;im=I/ki;%29.定子极间窗口面积SW=(1/2)*(pi/Ns)*((Ds/2-hcs)^2-(Da/2+g)^2)-bps*ds/2;%30.导线规格、导线截面积Sa和槽满率ks%预取电流密度J1=5A/mm^2,J1=5;Sa1=I/J1;Sa=3.94; %%%%%%%%%%%%%%%%%%%%此处可以输入数值%%%%%%%%%%%每槽导体净截面积SCu=Nph*Sa/2;%槽满率ks=SCu/SW;%31.电流密度J=5; %%%%%%%%%%%%%%%%%%%%此处可以输入数值%%%%%%%%%%%32.绕组平均匝长lavbw=(Da+2*g)*sin(pi/Ns)-bps/2;a=bps+bw;b=la+2*5*10^(-3)+bw;r=5*10^(-3)+bw/2;lav=2*la+2*(bps-2*5*10^(-3))+2*pi*r;%33.每相绕组导线总长l=Nph*lav;%34.每相绕组电阻Rp=0.0217*l/Sa;%参数计算%35.铜重GCu=q*Sa*l*10^(3)*8.9*10^(-6);%36.定子铁芯体积VSFe=((1/2)*(pi/Ns)*((Ds/2)^2-(Ds/2-hcs)^2)+bps*ds)*2*Ns*lFe;%37.转子铁芯体积VRFe=((1/2)*(pi/Nr)*((Di/2+hcr)^2-(Di/2)^2)+bpr*(gi-g)/2)*2*Nr*lF e;%38.铁芯重GFe=(VSFe+VRFe)*10^(9)*7.8*10^(-6);%39.电负荷Dsi=Da+2*g;A=q*Nph*I/(pi*Dsi);%40.铜耗PCu=q*I^2*Rp;%41.电机利用系数TN=PN/(2*n*pi/60);K=TN/(Da^2*la);。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
开关磁阻电机一、概述开关磁阻电动机结构简单、可靠性高、恒转矩、恒功率而且调速性能好(覆盖功率范围10W~5MW的各种高、低速驱动调速系统)、价格便宜、鲁棒性好等优点引起了各国电气传动界的广泛重视,由其构成的调速系统兼有直流传动和普通交流传动的优点,是继变频调速系统、无刷直流电动机调速系统的最新一代无级调速系统。
这种新型调速系统使开关磁阻电机存在许多潜在的领域,在各种需要调速和高效率的场合均能得到广泛使用。
开关磁组电机调速系统之所以能在现代调速系统中异军突起,主要是因为它卓越的系统性能,主要表现在:(1) 电动机结构简单、成本低、可用于高速运转。
(2)功率电路简单可靠。
(3)系统可靠性高。
(4)起动转矩大,起动电流低。
典型产品的数据是:起动电流为额定电流的15%时,获得起动转矩为100%的额定转矩;起动电流为额定电流的30%时,起动转矩叮达其额定转矩的250%。
(5)适用于频繁起停及正反向转换运行。
(6)可控参数多,调速性能好。
控制开关磁阻电动机的主要运行参数和常用方法至少有四种:相导通角、相关断角、相电流幅值、相绕组电压。
(7)效率高,损耗小。
以3kw SRD为例,其系统效率在很宽范围内都是在87%以上,这是其它一些调速系统不容易达到的。
(8)可通过机和电的统一协调设计满足各种特殊使用要求。
二、开关磁阻电动机的结构图1-1开关磁阻电机结构图典型的三相开关磁阻电动机的结构如图1-1所示。
其定子和转子均为凸极结构,图示电机的定子有8个极,转子有6个极。
定子极上套有集中线圈,两个空间位置相对的极上的线圈顺向串联构成一相绕组,图2-1中只画出了A相绕组;转子由硅钢片叠压而成,转子上无绕组。
该电机则称三相8/6极开关磁阻电动机。
在结构形式及工作原理上,开关磁阻电动机与大步距反应式步进电机并无差别;但在控制方式上步进电机应归属于他控式变频,而开关磁阻电动机则归属于自控式变频;在应用上步进电机都用作“控制电机”而开关磁阻电机则是拖动用电机,因此电机设计时所追求的目标不同而使电机的设计参数不同。
与反应式步进电动机相似,开关磁阻电动机是双凸极可变磁阻电动机。
图1-1给出了以8/6极开关磁阻电机为例的结构原理图,图中仅给出了一相的绕组及外围功率开关电路,从这个结构原理图中可以清晰的看到,开关磁阻电动机是双凸极结构,其转子上没有任何形式的绕组,也无永磁体,而定子上只有简单的集中绕组,其中径向相对的两个绕组构成一相。
电动机每一相中流过的电流是由外围功率开关电路中的开关根据转子位置的变化,进行相应的通断而获得的。
图1-1中给出的开关磁阻电动机是四相的,通常情况下开关磁阻电动机可以设计成多种不同相数的结构,如两相、三相、四相或更多相,当相数增加时其结构将变得更复杂,相应的外围电路所使用的器件也相应增加。
开关磁阻电动机极数的设计也有多种形式,但是定、转子极数和相数要遵循一定的关系。
即定子极数应为相数的2倍或2的整数倍;而转子极数应不等于定子极数且一般转子极数少于定子极数但都是偶数极[2]。
由于开关磁阻电动机相数与极数的设计,低于三相的电动机没有自起动能力,对于有自启动、四象限运行要求的驱动场合,应选用表1-1所对应的定、转子极数组合方案。
3015 3.21表2-1 开关磁阻电动机各种方案三、开关磁阻电机的工作原理开关磁阻电机的工作原理遵循磁磁阻最小原理,即磁通总是要沿着磁阻最小路径闭合。
因此,它的结构原则是转子旋转时磁路的磁阻要有尽可能大的变化。
所以开关磁阻电动机采用凸极定子和凸极转子的双凸极结构,并且定转子极数不同。
如图1-1,当A相绕组通电时,因磁通总要沿着磁阻最小的路径闭合,将力图使转子转动最终使转子1、3极和定子A、A'极对齐,A相断电、B相通电时,则B相电流产生的磁吸力要吸引转子2、4极,使转子逆时针转动,最终使转子θ=机械角。
再使B相断电、C 2、4极与定子B、B'对齐,转子在空间转过30相通电,转子又将逆时针转过30,一个通电周期使转子在空间转过了一个齿距。
电机若按A-C-B-A的顺序通电,则反方向旋转。
电流的方向不影响上述的动作过程。
为保证开关磁阻电动机能连续旋转,当A 相吸合时,B 相的定、转子极轴线应错开1/m 个转子极距,m 为电机相数,若电机极对数为p ,定子极数2s N mp =,则转子极数应为p m N r /)1(2 =。
根据这个规律,可得到各种不同相数、不同极数的开关磁阻电机,常用的有:三相6/4极,三相6/8极,四相8/6极,四相8/10极,三相12/8极等。
当电机定子每相绕组的通电频率为f 时,每个电周期转子转过一个转子极距,每秒钟转过f 个转子极距,即每秒转过r f N 转。
电动机的转速与绕组通电频率的关系为60rfn N =四、 开关磁阻电动机的主电路开关磁阻电动机的主电路有多种形式,具有代表性的3种电路结构如图1-2所示,图中只画出了其中的一相电路。
图a)是不对称半桥电路,1VT 、2VT 导通时,绕组所加电压为正dU ,关断其中一只主元件零电压续流时,绕组所加电压为零;1、2同时关断,绕组电流通过1、2续流时,绕组电压为负d ,它可以方便地实现前面分析中所提的各种控制方案,是开关磁阻电动机最具典型也是用得最多的主电路形式。
图b)是单电源双绕组结构形式,每相有完全耦合的通电绕组及续流绕组,1VT 导通时,A 相通电绕组电压为d U+,1VT 关断后,磁场储能由其耦合线圈使1VD 导通而续流,相当于绕组电压为dU -。
这种方案缺点很多,已极少采用。
图c)是双电源单绕组,双电源一般靠电解电容分裂电源得到,1VT 导通时,A 相绕组电压为2d U +,能量由上电源提供;1VT 关断后,1VD续流,A 相绕组电压为2d U -,能量回馈回下电源。
为使上下电源工作对称,电机应采用偶数相,这种方案的优点是元件数量少(但元件总伏安容量与a 图同),电机的引出线少,缺点是无法实现零电压续流。
五、开关磁阻电机的系统原理图根据前面的控制原理,可得到开关磁阻电动机调速系统的系统原理图如图1-3所示。
图中控制模式选择框是前面控制策略的总体现,它根据速度信号确定控制模式――CCC 或APC ,在CCC 方式时,on θ、off θ不变,即令逻辑控制单元按自控式变频的固有模式确定各相的通断时刻,转矩指令T *即可直接作为电流指令i *输出;在APC 方式时,把电流指令i *抬得很高,斩波不会出现,由转矩指令T *的增、减来决定on θ、off θ的指令值on θ*、off θ*,由on θ*、off θ*修正逻辑控制框所确定的通、断时刻。
在CCC 控制方式时,实际电流的控制由PWM 斩波实现,PWM 的方法有多种,电流跟踪法(滞环比较)是最常用的办法,用电流跟踪法时,则不需要电流调节器ACR ,也可采用其它的PWM 方法,如三角波与直流电平比较的方法。
斩波控制时,由逻辑控制框决定通断的大周期,由PWM 框确定真正通断的斩波时刻,经“逻辑与”后输出。
开关磁阻电动机的各相是独立控制、独立驱动的,电机的每相一般要引出二个端子,使电机的引线较多。
电流比较与PWM 环节也是各相独立进行,因此,开关磁阻电机可以缺相运行。
开关磁阻电动机的转矩脉动大,相应措施跟不上时就使噪音大,这也是由其工作原理所决定了的缺点。
总之,开关磁阻电动机有不少其它系统所不具备的优点,特别是高效率区宽,高速运行区域宽等,也有许多目前还让人不满意的缺点,这也正说明它还正在发展之中。
六、matlab动态仿真1、SRM的simulink模型2、SRM模块介绍1)电机模型及参数设置Switched Reluctance Motor2)反馈环节内环:电流反馈,电流参考值设置为200A;外环:角度反馈,开通角40º,关断角75º3)功率转换器功率变换器是直流电源和SRM的接口,起着将电能分配到SRM绕组中的作用,同时接受控制器的控制。
由于SRM遵循“最小磁阻原理”工作,因此只需要单极性供电的功率变换器。
功率变换器应能迅速从电源接受电能,又能迅速向电源回馈能量。
4)输出输出显示:输出磁通Flux,电流I,转矩Te,角速度w3、运动过程曲线分析1)空载(a)、低速阶段磁通:三种颜色表示三个开关过程。
可以看出,在前一相开关将要关断的是时候,接通后一项开关。
磁通一直处于上升状态。
相电流:转速小,采用的是斩波控制,把电流最大值控制在200A.转矩:θddLiTe221=,只有当绕组电感随转子位置角而增大时,给绕组通电才能产生正向电动转矩。
转速:因为负载转矩为0,电机处于加速状态,但速度很小。
(b)、高速阶段2 )带负载转矩在相电流为理想平顶波的情况下,SR 电机平均电磁转矩Tav 的解析式 :在θon 和θoff 不变时,绕组电流随外加电压的增大而增大,随转速的升高而减小;通过调整开关角和关断角也可以影响绕组电流,从而就间接地使电动机的电磁转矩增大。
当SR 电动机运行在电流值很小的情况下,磁路不饱和,电磁转矩与电流平方成正比;当运行在饱和情况下,电磁转矩与电流的一次方成正比。
这个结论可以作为制定控制策略的依据。
负载转矩TL=55N.m ,电流斩波的最高转速提高,稳定运行时的转速降低。
3) θon 一定时,增大θoff)21)((2minmax 2min 2222L L L U N m T off on off S r av -----Ω=θθθθθθπ电流斩波的最高转速提高在θon 一定时,增大θoff ,平均转矩也相应增大。
但导通角θc= θoff - θon 有一个最佳值,超过此值, θc 增大,平均转矩反而减小。
4)θoff一定时,减小θon开通角越小,电流幅值越大,续流时间越长。
θon 是控制转矩的重要参数:W一定时,若开通角θon较小,相电流直线上升时间较长,从而增大电流,提高转矩。