《计算机科学》面向外骨骼机器人人机交互的步态数据获取系统及识别模型_高增桂
基于粒子群优化-支持向量机方法的下肢肌电信号步态识别

基于粒子群优化-支持向量机方法的下肢肌电信号步态识别高发荣;王佳佳;席旭刚;佘青山;罗志增【摘要】为提高下肢表面肌电信号步态识别的准确性和实时性,该文提出一种基于粒子群优化(PSO)算法优化支持向量机(SVM)的模式识别方法.首先对消噪后的肌电信号提取积分肌电值和方差作为特征样本,然后利用PSO算法优化SVM的惩罚参数和核函数参数,最后利用步态动作的肌电信号样本数据对构造的SVM分类器进行训练、测试.实验结果表明PSO-SVM分类器对下肢正常行走5个步态的识别率,明显高于未经参数优化的SVM分类器,优化后平均识别率达到97.8%,并兼顾了分类的准确性和自适应性.【期刊名称】《电子与信息学报》【年(卷),期】2015(037)005【总页数】6页(P1154-1159)【关键词】模式识别;步态分析;肌电信号;粒子群优化;支持向量机【作者】高发荣;王佳佳;席旭刚;佘青山;罗志增【作者单位】杭州电子科技大学智能控制与机器人研究所杭州 310018;杭州电子科技大学智能控制与机器人研究所杭州 310018;杭州电子科技大学智能控制与机器人研究所杭州 310018;杭州电子科技大学智能控制与机器人研究所杭州310018;杭州电子科技大学智能控制与机器人研究所杭州 310018【正文语种】中文【中图分类】TP391.4;TP24人体步态是指人行走时所表现出的肢体动作与姿态,正常行走步态具有协调性、均衡性和周期性特点。
在一个步态周期内,根据足底与地面的接触情况,可将步态分为支撑相(足触地)和摆动相(足离地)。
每个相位又可再细分成若干阶段[1]。
步态运动主要依靠腿部肌肉协调驱动下肢肌肉-骨骼系统来完成,而肌电信号(ElectroM yoGraphy, EMG)是由肌肉收缩时所产生的动作电位序列,它与肌肉的活动状态和运动的功能状态之间存在着关联性,不同肢体动作间的差异可通过肌电信号的特征来体现。
对这些特征的研究,有助于进行步态的识别和分析,这在运动科学、行为科学和康复医学工程等领域尤为重要。
人工智能在高校教育教学中的应用与研究

黑龙江科学HEILONGJIANG SCIENCE第12卷第7期2021年4月Vol. 12Apr. 2021人工智能在高校教育教学中的应用与研究陆世尧(南京城市职业学院,南京211200)摘要:对人工智能在高校教育教学中的应用进行研究。
介绍了人工智能在教育教学中的应用及优势:可实现教育资源的整合,提 供了各业务信息化平台的数据抽取,对学生实验实训环节进行指导和分析,增强了学生个人体验性和课题娱乐性,降低了学习成本,不用完全依赖于教师指导,提升自主学习能力的同时也降低了教师的工作量。
分析了人工智能三项关键技术,即智能识别技 术、学习分析技术及虚拟现实技术在教育教学中发挥的重要作用。
还阐述了人工智能在高校教育教学中的应用场景。
通过融合创新及优化教育服务的供给方式来深化教学模式变革,将成为人工智能在高校教育教学应用中的未来。
关键词:人工智能;高校;教育教学中图分类号:G434 文献标志码:B 文章编号:1674 -8646(2021)07 -0049 -03Application and Research of Artificial Intelligence in Educationand Teaching in Colleges and UniversitiesLu Shiyao(Nanjing City Vocational College , Nanjing 211200, China)Abstract : The research explores the application of artificial intelligence in university education teaching , and introduces the application and advantages of artificial intelligence in education and teaching ・ It can achieve the integration ofeducation resource , and provide data extraction of all business informatization platform ・ The research guides andanalyzes experimental training of students , to strengthen the individual experience and project entertainment , and reduce learning cost. Students don 51 completely rely on teacher , s guidance ・ So the autonomous learning ability of students canbe improved , and teacher ' s workload can be reduced ・ The research analyzes the important function of three keytechnological items of artificial intelligence in education and teaching ・ The three items include intelligent identification , learning analysis and virtual reality technology. The research expounds the application scenarios of artificial intelligence in teaching of colleges and universities. The teaching model reform of the supply pattern of integration innovation andoptimization teaching service will become the future direction of the application of artificial intelligence in education ofcolleges and universities.Key words : Artificial intelligence ; College and university ; Education and teaching通过人工智能提高人才培养质量和学生素养,满足个性化教学需求是人工智能在教育教学中的研究方向,高校也期望通过人工智能的先进技术助力于教育 教学改革,实现智慧化教学。
人工智能之知识图谱

图表目录图1知识工程发展历程 (3)图2 Knowledge Graph知识图谱 (9)图3知识图谱细分领域学者选取流程图 (10)图4基于离散符号的知识表示与基于连续向量的知识表示 (11)图5知识表示与建模领域全球知名学者分布图 (13)图6知识表示与建模领域全球知名学者国家分布统计 (13)图7知识表示与建模领域中国知名学者分布图 (14)图8知识表示与建模领域各国知名学者迁徙图 (14)图9知识表示与建模领域全球知名学者h-index分布图 (15)图10知识获取领域全球知名学者分布图 (23)图11知识获取领域全球知名学者分布统计 (23)图12知识获取领域中国知名学者分布图 (23)图13知识获取领域各国知名学者迁徙图 (24)图14知识获取领域全球知名学者h-index分布图 (24)图15 语义集成的常见流程 (29)图16知识融合领域全球知名学者分布图 (31)图17知识融合领域全球知名学者分布统计 (31)图18知识融合领域中国知名学者分布图 (31)图19知识融合领域各国知名学者迁徙图 (32)图20知识融合领域全球知名学者h-index分布图 (32)图21知识查询与推理领域全球知名学者分布图 (39)图22知识查询与推理领域全球知名学者分布统计 (39)图23知识查询与推理领域中国知名学者分布图 (39)图24知识表示与推理领域各国知名学者迁徙图 (40)图25知识查询与推理领域全球知名学者h-index分布图 (40)图26知识应用领域全球知名学者分布图 (46)图27知识应用领域全球知名学者分布统计 (46)图28知识应用领域中国知名学者分布图 (47)图29知识应用领域各国知名学者迁徙图 (47)图30知识应用领域全球知名学者h-index分布图 (48)图31行业知识图谱应用 (68)图32电商图谱Schema (69)图33大英博物院语义搜索 (70)图34异常关联挖掘 (70)图35最终控制人分析 (71)图36企业社交图谱 (71)图37智能问答 (72)图38生物医疗 (72)图39知识图谱领域近期热度 (75)图40知识图谱领域全局热度 (75)表1知识图谱领域顶级学术会议列表 (10)表2 知识图谱引用量前十论文 (56)表3常识知识库型指示图 (67)摘要知识图谱(Knowledge Graph)是人工智能重要分支知识工程在大数据环境中的成功应用,知识图谱与大数据和深度学习一起,成为推动互联网和人工智能发展的核心驱动力之一。
人工智能赋能学科拔尖人才继续教育创新模式研究
人工智能赋能学科拔尖人才继续教育创新模式研究目录一、内容概览 (2)1.1 研究背景与意义 (2)1.2 国内外研究现状综述 (4)1.3 研究内容与方法 (5)二、人工智能赋能学科拔尖人才继续教育创新模式的理论基础 (6)2.1 人工智能发展概述 (7)2.2 终身学习理念及其在教育中的应用 (9)2.3 赋能理论在继续教育中的应用 (10)三、人工智能赋能学科拔尖人才继续教育创新模式构建 (12)3.1 创新模式构建的原则与目标 (13)3.2 创新模式的主要构成要素 (14)3.3 创新模式的实施步骤 (16)四、人工智能赋能学科拔尖人才继续教育创新模式的实证研究 (17)4.1 实证研究设计 (18)4.2 实证研究过程与数据收集 (19)4.3 实证研究结果与分析 (20)五、人工智能赋能学科拔尖人才继续教育创新模式的评价与优化 (22)5.1 创新模式的评价指标体系构建 (23)5.2 创新模式的评价方法选择 (24)5.3 创新模式的优化策略探讨 (25)六、结论与展望 (27)6.1 研究结论总结 (28)6.2 研究不足与局限 (29)6.3 对未来研究的展望 (29)一、内容概览随着人工智能技术的快速发展,教育领域也逐渐受到了其影响。
为了更好地培养和选拔学科拔尖人才,本研究旨在探讨人工智能在继续教育创新模式中的应用,以期为我国高等教育发展提供有益的借鉴和启示。
本研究将对当前国内外人工智能在继续教育领域的应用现状进行梳理,分析其优势和不足,为后续研究提供理论依据。
通过对学科拔尖人才的需求分析,明确人工智能在继续教育创新模式中的关键作用和应用方向。
结合实际案例,探讨人工智能在继续教育创新模式中的实践策略和方法,包括课程设计、教学资源开发、学习评价等方面。
本研究将对人工智能赋能学科拔尖人才继续教育创新模式的实施效果进行评估,为进一步推广和完善该模式提供参考。
通过本研究的开展,有望为我国高等教育机构在培养学科拔尖人才方面提供新的思路和方法,同时也有助于推动我国继续教育事业的发展。
四足机器人运动及稳定控制关键技术综述
四足机器人运动及稳定控制关键技术综述目录一、内容概览 (2)1. 四足机器人概述 (3)2. 研究背景与意义 (4)3. 研究现状和发展趋势 (5)二、四足机器人运动原理及结构 (7)1. 四足机器人运动原理 (8)1.1 动力学模型建立 (9)1.2 运动规划与控制策略 (10)2. 四足机器人结构组成 (11)2.1 主体结构 (13)2.2 关节与驱动系统 (14)2.3 感知与控制系统 (17)三、四足机器人运动控制关键技术 (19)1. 运动规划算法研究 (20)1.1 基于模型预测控制的运动规划算法 (21)1.2 基于优化算法的运动规划策略 (22)2. 稳定性控制策略研究 (23)2.1 静态稳定性控制策略 (25)2.2 动态稳定性控制策略 (26)3. 路径规划与轨迹跟踪控制技术研究 (27)3.1 路径规划算法研究 (28)3.2 轨迹跟踪控制策略设计 (29)四、四足机器人稳定控制实现方法 (31)1. 基于传感器反馈的稳定控制方法 (32)1.1 传感器类型与布局设计 (34)1.2 传感器数据采集与处理技术研究 (35)2. 基于优化算法的稳定控制方法应用探讨 (37)一、内容概览四足机器人运动机制:阐述四足机器人的基本运动模式,包括行走、奔跑、跳跃等,以及不同运动模式之间的转换机制。
稳定性分析:探讨四足机器人在运动过程中的稳定性问题,包括静态稳定性和动态稳定性,以及影响稳定性的因素。
运动控制关键技术:详细介绍四足机器人运动控制的关键技术,包括运动规划、轨迹跟踪、力控制等,以及这些技术在实现机器人稳定运动中的应用。
传感器与感知技术:介绍四足机器人运动及稳定控制中涉及的传感器与感知技术,包括惯性测量单元(IMU)、激光雷达、视觉传感器等,以及这些技术在机器人运动控制中的作用。
控制算法与策略:探讨四足机器人运动及稳定控制中常用的控制算法与策略,包括基于模型的控制、智能控制方法等,以及这些算法在实际应用中的效果。
“人工智能+ 新工科”背景下计科专业实践教学改革新探
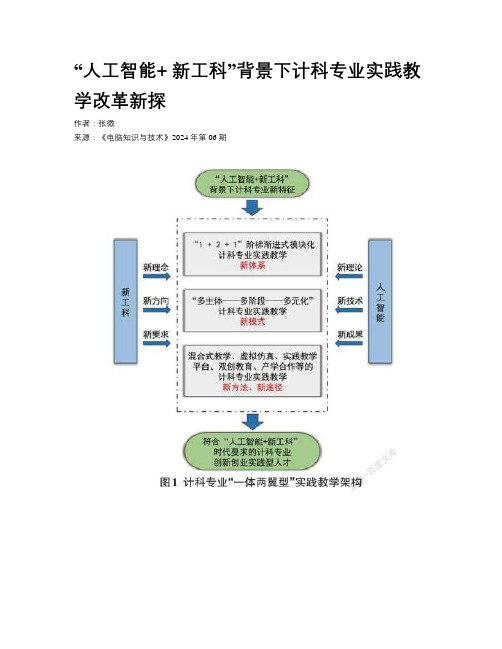
“人工智能+ 新工科”背景下计科专业实践教学改革新探作者:***来源:《电脑知识与技术》2024年第06期摘要:面对“人工智能+ 新工科”時代更加注重学生实践能力提高的新要求,针对计算机科学与技术(简称“计科”)专业实践教学中学生工程实践能力较为薄弱,实践教学内容难以适应技术更新要求,实践教学方式单一,产学合作不足的现状和问题,需要采取实践教学改革新策略,打破传统计科专业实践教学体系及人才培养模式,对现有实践教学课程体系、教学模式、教学方法、途径等进行调整与优化,构建基于“人工智能+ 新工科”的一体两翼型实践教学架构,以提高计科专业学生的工程实践能力和综合素质,培养创新创业实践型计科专业人才,适应新时代企业和社会发展的需要。
关键词:人工智能;新工科;计科专业;实践教学;教学改革中图分类号:G642 文献标识码:A文章编号:1009-3044(2024)06-0140-030 引言近年来,以深度学习为代表的“人工智能”技术迅猛发展,大幅度跨越了科学研究与实际应用之间的鸿沟,相关技术已经融入社会各个领域,以云计算、大数据、区块链、物联网、机器学习和神经网络为技术基础的智能时代已经到来[1]。
相对于传统工科而言,在新科技革命和产业变革背景下,新工科专业应运而生,标志着我国工程教育发展新思维、新方式下的重大战略转变,深刻地影响着高校计算机科学与技术专业实践教学与人才培养[2-4]。
计算机科学与技术(简称“计科”)专业多年来一直处于高速发展的轨道中,是社会需求量非常大的一级学科本科专业,实践性极强,工程实践能力和综合素质要求非常高。
计科专业创新创业实践型人才的培养是高等教育的发展方向和重要目标。
面对“人工智能+ 新工科”时代对计科专业提出的新要求,将“人工智能”新理论、新技术、新成果与“新工科”建设全面深度融合,探索计科专业实践教学新模式,优化传统实践教学内容与方法,推动新工科创新型实践教学模式的建设与发展,培养计科专业领域创新创业实践型人才,既是高校人才培养的重要目标,也是企业对人才素质的现实要求;既是适应新时代中国经济建设和经济转型,实现国家发展战略目标的迫切要求,更是国家富强和民族复兴的必然要求。
步态骨骼模型的协同表示识别方法
步态骨骼模型的协同表示识别方法关桂珍;杨天奇【期刊名称】《计算机科学与探索》【年(卷),期】2018(012)001【摘要】针对目前步态识别中极易受到服饰和携带物等影响的难题,提出一种基于Kinect获取骨骼模型的步态识别新方法.对步态3D骨骼模型提取人体总质心,并与在步态周期中富有运动特征的人体四肢分质心的活动信息结合,分别得到动态与静态特征.动态特征可看作是周期信号,使用小波分解和带高斯滤波的离散傅里叶变换进行频谱处理,消除了外界干扰并增强了特征之间的差异性.通过动态时间规整算法把步态骨骼特征投影到相异空间,用协同表示进行匹配和归一化加权融合,最后根据最近邻算法进行分类识别.实验证明,该方法与稀疏表示识别算法相比得到了较为理想的识别效果,为步态识别在身份认证的应用领域提供了可靠的理论基础.%Aiming at the problem of the influence which is easily caused by clothing and carrying object on existing gait recognition, this paper proposes a novel skeleton model-based method for gait recognition using Kinect. The center of mass of 3D gait skeleton model is obtained and combined with the activity information of the body limbs which have rich movement characteristics in the gait cycle to form the dynamic and static features respectively. Regarded as a periodic signal,the spectrum of dynamic features is analyzed by wavelet transform and discrete Fourier transform with Gaussian filter.This processing can eliminate the effect of external interference and enhance the difference among features.After projectinginto dissimilarity space via dynamic time warping and matching by collaborative representation classification,the gait features are normalized,weighted and fused.Finally,the nearest neighbor algorithm is adopted to pared with sparse representation recognition,the experimental results show that the proposed method can improve recognition effect and provide reliable theoretical basis for gait recognition in the field of identity authentication.【总页数】10页(P143-152)【作者】关桂珍;杨天奇【作者单位】暨南大学信息科学技术学院,广州510632;暨南大学信息科学技术学院,广州510632【正文语种】中文【中图分类】TP391【相关文献】1.基于比例归一化阈值的外骨骼步态识别方法 [J], 宋鹏;莫新民;邓亚萍;王晶;韦祖拔2.基于核协同表示的步态识别 [J], 李占利;孙卓;崔磊磊;袁鹏瑞3.小波特征和协同表示的步态识别研究 [J], 王鹏峰;程铭;4.小波特征和协同表示的步态识别研究 [J], 王鹏峰;程铭;5.基于SEF-GHEI及协同表示的步态识别研究 [J], 徐守坤;邱亮;石林;李宁因版权原因,仅展示原文概要,查看原文内容请购买。
面向CIMS的人机交互模型

面向CIMS的人机交互模型
杜清秀
【期刊名称】《微型机与应用》
【年(卷),期】1994(000)011
【摘要】人机交互这个新方向的国内外的发展概况和研究内容,重点讨论了各种人机交互模型,并在此基础上提出了面向CIMS的人机交互概念模型。
【总页数】3页(P19-20,23)
【作者】杜清秀
【作者单位】无
【正文语种】中文
【中图分类】TH166
【相关文献】
1.CIM—OSA DM:CIMS环境下面向对象的语义关联数据模型 [J], 古新生;顾学春
2.面向战场的多通道人机交互模型 [J], 李昌岭;李伟华
3.面向过程人机交互战略决策支持系统模型研究 [J], 王恒;白光晗
4.面向外骨骼机器人人机交互的步态数据获取系统及识别模型 [J], 高增桂;孙守迁;张克俊;佘铎淳;杨钟亮
5.CIM—OSADM:计算机集成制造(CIM):环境下面向对象的语义关联数据模型 [J], 古新生
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第41卷 第10期2014年10月计算机科学Computer ScienceVol.41No.10Oct 2014到稿日期:2013-07-01 返修日期:2013-09-06 本文受国家自然科学基金项目:基于云模型的音乐情感表示与识别算法研究(61303137),基于基因表达式编程的动漫情感化配乐技术研究(61070075),基于嵌套随机集的产品意象认知模型研究(61003147),生物启发设计中产品创意造型生成机制及其演化模型研究(51305077),广东省产学研项目基于人体行为模型的智能助行机器人研究与开发(00411420124671038)资助。
高增桂(1986-),男,博士生,主要研究方向为人机接口、应用人机工程;孙守迁(1963-),男,博士,教授,主要研究方向为计算机辅助设计、人机共生装备;张克俊(1978-),男,博士,助理研究员,主要研究方向为进化计算、机器学习,E-mail:channy@zju.edu.cn(通信作者);佘铎淳(1987-),男,硕士,主要研究方向为人机交互;杨钟亮(1982-),男,博士,讲师,主要研究方向为体感交互、生物启发设计等。
面向外骨骼机器人人机交互的步态数据获取系统及识别模型高增桂1 孙守迁1 张克俊1 佘铎淳1 杨钟亮2(浙江大学计算机科学与技术学院 杭州310027)1 (东华大学机械工程学院 上海201620)2摘 要 外骨骼机器人人机交互是当前的研究热点,通常需要获取人体相关运动信息作为控制信号源。
为了采集人体步态数据,研究了生理信号与关节运动之间的关联机制,设计了一种步态数据获取系统,其利用鞋内薄膜压力传感器和关节角度传感器组成测试设备,成功采集了15组健康男子在3km/h、4km/h和5km/h 3种速率下自然行走的步态数据。
提出采用基因表达式编程建立膝关节运动识别模型,并使用所采集的步态数据进行训练和验证。
结果显示,利用此模型可有效进行关节运动的识别和预测,验证了本系统作为外骨骼人机接口的可行性。
关键词 人机交互,人机接口,步态分析,基因表达式编程,外骨骼中图法分类号 TP23 文献标识码 A DOI 10.11896/j.issn.1002-137X.2014.10.009 Gait Data System and Joint Movement Recognition Model for Human-exoskeleton InteractionGAO Zeng-gui 1 SUN Shou-qian1 ZHANG Ke-jun1 SHE Duo-chun1 YANG Zhong-liang2(School of Computer Science and Technology,Zhejiang University,Hangzhou 310027,China)1(College of Mechanical Engineering,Donghua University,Shanghai 201620,China)2 Abstract Human-machine interaction plays a great role in control of exoskeletons,and usually it is required to obtainthe relevant information about body motion as control signal sources.In order to collect human gait data and find the as-sociation between the physiological signals and the joint movement mechanism,we designed a Gait Data AcquisitionSystem(GDS)which consists of eight thin-film pressure sensors and a joint angle sensor.After gait experiments,we ob-tained 15groups of gait data of health male objects with natural walking under three rates in 3km/h,4km/h and 5km/h.We also proposed establishment of recognition model of the knee joint motion using GEP.The gait data was used totrain and validate the recognition model.The result shows that the model can effectively identify and predict knee jointmotion and the GDS is feasible as a human-machine interface in exoskeletons.Keywords Human-computer interaction,Human-machine interface,Gait analysis,GEP,Exoskeleton 1 引言外骨骼机器人是一种以人为主、机械为辅的穿戴式人机一体化[1]装备,它巧妙地结合人的智能和机器的力量来完成仅靠人体自身无法单独完成的任务,不仅扩展了人体感官,也增强了人体机能。
由于外骨骼机器人与人体运动相平行,因此其控制要点是与使用者之间的运动适配性。
为了获得和谐自然的人机交互,通常将使用者置于控制环路以形成闭环的反馈控制回路[2]。
人机接口是实现人与外骨骼通信的方式,它通过采集人体生理信息,获得人体运动意图,帮助外骨骼制定有效的控制策略[3]。
对下肢外骨骼而言,人机接口的功能是分析和预测人体步态数据。
步态是人类步行的综合特征,包括中枢命令、身体平衡和协调控制,涉及肢体肌肉和关节的协同运动。
其中,骨骼是运动的杠杆,关节用于运动的联系,神经系统用于控制,肌肉收缩作为动力,从而实现下肢的行走运动[4]。
典型步态是连续的周期运动,包含许多复杂的生理信息,步态分析旨在检测和分析这一过程中的运动轨迹、接触力信息、肌电信号等生理参数变化规律并应用于医学、生物工程等领域[5]。
随着计算机科学的发展,步态分析和识别研究取得了长足进步,常用的方法是基于视觉的步态分析及利用生理信号测量的分析等。
基于视觉的步态分析主要用于临床诊断以及身份识别,而对外骨骼机器人的控制通常采用生理信号测量方法。
脑机接口(Brain-Machine Interface,BMI)是当前智能控制领域的研究热点[6],其局限在于难以反映人的无意识行为。
利用表面肌电信号(sEMG)分析技术提取反映运动意愿·24·的有效特征,已经应用于人工假肢及外骨骼控制策略[7,8]。
吴剑锋[9]等利用简约支持向量机分类算法对起立、平地行走以及上下楼梯等4个日常下肢动作进行了识别。
文献[10]中,EMG作为控制信号源成功研制出HAL-3外骨骼助力机器人。
相对于肌电信号,压力信号具有直观、获取简便等特点,因此常用于外骨骼系统中步态数据的测量和分析[3,11,12]。
应用压力信号进行步态分析主要以地面反射压力(GRF)和鞋内压力(IP)为对象。
正常步态周期的GRF具有明显的对称双峰特征,是生物力学研究的重要指标,而IP不受压力垫限制,对步态干扰小,近年来逐渐受到研究者重视[13]。
Savelberg[14]使用人工神经网络对IP及GRF进行建模,8个不同区域的足部压力作为多层感知器的输入,该模型扩展了GRF的计算方法,也是本文工作的理论依据之一,但是该模型对人体位姿预测较为局限;Xavier Tortolero[15]等利用足底压力中心(Center Of Pressure,COP)预测从站立到跨步动作是否发生,但这一预测仅限于步态周期的某一阶段;KuanZhang[16]等设计了一种便携式设备用于测量和记录GRF信息,并应用人工神经网络识别人体一段时间内的运动类型和强度;郑成闻[17]设计了一套基于柔性双足的足底压力分布信息获取系统来对人体运动中足底压力分布信息变化进行定性分析,完成了基于足底压力分布的步态识别并细分步态相位周期以适应控制需要,该系统并未涉及足底压力以外的定量生理数据,无法完成足底压力与关节运动之间的精确建模。
现有研究多采用足底压力数据对步态相位或运动类型进行识别,但对于足底压力与关节运动之间的关联机制尚不明确。
为建立外骨骼机器人人机接口和步态预测模型,本文设计了一套基于足底压力和膝关节角度测量的步态数据获取系统(GDS),利用该系统成功采集了人体在3种不同速度下自然行走的步态数据,最后采用基因表达式编程建立膝关节运动识别模型。
2 方法2.1 基因表达式编程(GEP)GEP是由葡萄牙生物学家Ferreira于20世纪末在遗传算法和遗传编程的基础上提出的[18]。
目前,GEP已成功应用于数学、物理、化学、生物、计算机、微电子、电信、军工、经济等领域,并取得了丰硕的成果。
本文将利用GEP构建常规步态下膝关节角度预测模型,该模型框架如图1所示。
图1 基于GEP的膝关节运动预测模型2.2 人体步态数据获取系统(GDS)GDS目标信息包括人体足底压力信息及膝关节角度信息,人体运动信息由数据采集卡进行采集并传输到上位机,由上位机对人体运动信息进行分析及划分步态相位,通过判断穿戴者运动意图并将处理分析后所产生的控制信号输送到执行机构,来实现人体运动信息对外骨骼机器人的控制。
实验系统框架图如图2所示。
图2 GDS框架图在GDS框架图中,数据采集卡为国产MPS-010602多功能USB数据采集卡,其价格低廉,具有16路单端模拟信号采集、4路模拟信号输出、8路数字信号输入和输出。
足底压力传感器采用Flexiforce PS-02压阻型传感器,它是由美国Tekscan公司生产的一种电阻元件,其厚度仅为0.127mm,电导率与负载之间呈高度的线性关系,可以满足体积、量程、滞后性能等设计要求,并且薄膜材质对各种形状的适应性强,可以很好地置于鞋底与足底接触的部分而不会产生信号的误差或干扰。
Flexiforce PS-02是电阻式压力敏感元件,随着敏感单元所受压力增大,电导值增大,电阻值下降。
因此设计调理电路将Flexiforce PS-02的电阻信号变化转换为电压信号变化,并且提供信号的增益功能。