大学物理C第11章资料
大学物理学C基本内容

《大学物理学C 》课程基本内容第一章 质点的运动1.直角坐标系、极坐标系、自然坐标系※2.质点运动的描述:位置矢量r、位移矢量r ∆=)()(t r t t r -∆+、运动方程)(t r r =。
在直角坐标系中,k t z j t y i t x t r)()()()(++=速度:t r v d d=; 加速度:22d d d d t rt v a ==在直角坐标系中,速度k v j v i v v z y x ++=,加速度k a j a i a a z y x++=自然坐标系中,速度 τ v v ==τ t s d d ,加速度t n a a a +==n rv t v2d d +τ 在极坐标系中,角量的描述:角速度t d d θω=,角加速度22d d d d tt θωα==3.运动学的两类基本问题:第一类问题:已知运动方程求速度、加速度等。
此类问题的基本解法是根据各量定义求导数。
第二类问题:已知速度函数(或加速度函数)及初始条件求运动方程。
此类问题的基本解法是根据各量之间的关系求积分。
例如据txv d d =,可写出积分式⎰x d =⎰t v d .由此求出运动方程)(t x x =。
4.相对运动:位移:t u r r ∆+'∆=∆ ,速度:u v v +'=,加速度:0a a a+'=第七章 气体动理论1.对“物质的微观模型”的认识;对“理想气体”的理解。
※2.理想气体的压强公式23132v n p k ρε==,其中221v m k =ε※理想气体物态方程:RT MmpV = 或 nkT p =理解压强与微观什么有关,即压强的物理含义是什么.※3.理想气体分子的平均平动动能与温度的关系:kT k 23=ε 理解温度与微观什么有关,即温度的物理含义。
※4.能量均分定理:气体处于平衡态时,分子每个自由度上的平均能量均为2kT概念:自由度※理想气体内能公式:RT iM m E 2=5.麦克斯韦气体分子速率分布律 ※麦克斯韦气体分子速率分布函数:定义:v NN v f d d 1)(=函数:22232π2π4)(v v v kTm e kT m f -⎪⎭⎫⎝⎛=以及v v f NNd )(d =;v v Nf N d )(d =;⎰21d )(v v v v Nf ;⎰21d )(v v v v f 等表示的物理含义。
大学物理讲义(第11章振动学基础)第一节
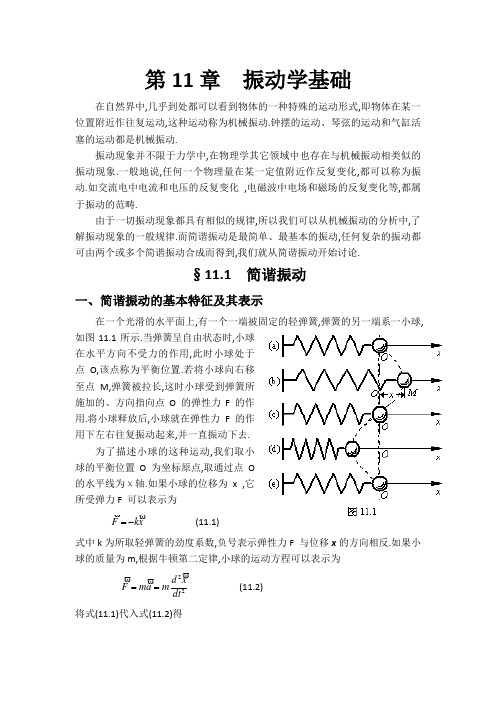
第11章 振动学基础在自然界中,几乎到处都可以看到物体的一种特殊的运动形式,即物体在某一位置附近作往复运动,这种运动称为机械振动.钟摆的运动、琴弦的运动和气缸活塞的运动都是机械振动.振动现象并不限于力学中,在物理学其它领域中也存在与机械振动相类似的振动现象.一般地说,任何一个物理量在某一定值附近作反复变化,都可以称为振动.如交流电中电流和电压的反复变化 ,电磁波中电场和磁场的反复变化等,都属于振动的范畴.由于一切振动现象都具有相似的规律,所以我们可以从机械振动的分析中,了解振动现象的一般规律.而简谐振动是最简单、最基本的振动,任何复杂的振动都可由两个或多个简谐振动合成而得到,我们就从简谐振动开始讨论.§11.1 简谐振动一、简谐振动的基本特征及其表示在一个光滑的水平面上,有一个一端被固定的轻弹簧,弹簧的另一端系一小球,如图11.1所示.当弹簧呈自由状态时,小球在水平方向不受力的作用,此时小球处于点O,该点称为平衡位置.若将小球向右移至点M,弹簧被拉长,这时小球受到弹簧所施加的、方向指向点O 的弹性力F 的作用.将小球释放后,小球就在弹性力 F 的作用下左右往复振动起来,并一直振动下去.为了描述小球的这种运动,我们取小球的平衡位置O 为坐标原点,取通过点O的水平线为χ轴.如果小球的位移为x ,它所受弹力F 可以表示为x k F (11.1)式中k 为所取轻弹簧的劲度系数,负号表示弹性力F 与位移x 的方向相反.如果小球的质量为m,根据牛顿第二定律,小球的运动方程可以表示为22dtx d m a m F (11.2) 将式(11.1)代入式(11.2)得kx dtx d m 22或者改写为 )(mk x dt x d 22220 (11.3) 式 (11.3) 是小球的运动方程.这个方程显示了小球受力的基本特征,即在运动过程中,小球所受力的大小与它的位移的大小成正比,而力的方向与位移的方向相反.具有这种性质的力称为线性回复力.由运动方程可以解得小球在振动过程中的位移 x 与时间 t 的关系.式(11.3)的解可以写为以下两种形式))sin()cos( t A x t A x 或 (11.5)式中 A 和φ都是积分常量,在振动中它们都具有明确的物理意义,对此我们以后再做讨论.式(11.5)的两式在物理上具有同样的意义,以后我们只取前一形式.上面我们分析了由轻弹簧和小球所组成的振动系统作无摩檫振动的例子,这样的振动系统称为弹簧振子.弹簧振子的振动是典型的简谐振动,它表明了简谐振动的基本特征.从分析中可以看出,物体只要在形如F =-k x 的线性回复力的作用下运动,其位移必定满足微分方程式 (11.3),而这个方程的解就一定是时间的余弦(或正弦)函数.简谐振动的这些基本特征在机械运动范围内是等价的,其中的任何一项都可以作为判断物体是否是作简谐振动的依据.但是,由于振动的概念已经扩展到了物理学的各个领域,任何一个物理量在某定值附近作往复变化的过程,都属于振动,于是我们可对简谐振动作如下的普遍定义:任何物理量x 的变化规律若满足方程0222 x dtx d m , 并且ω是决定于系统自身的常量,则该物理量的变化过程就是简谐振动.二、描述简谐振动的特征量振幅、周期(或频率)和相位是描述简谐振动的三个重要物理量,若知道了某简谐振动的这三个量,该简谐振动就完全被确定了,所以这三个量称为描述简谐振动的特征量.1.振幅振动物体离开平衡位置的最大距离称为振幅.在简谐振动)cos( t A x中,A 就是振幅.在国际单位制中,振幅的单位是米(m).2.周期振动物体完成一次全振动所用的时间,称为周期 ,常用T 表示;在1秒时间内完成全振动的次数,称为频率 ,常用ν表示;振动物体在2π秒内完成全振动的次数,称为角频率 ,就是式(11.5)中的ω.显然角频率ω、频率ν和周期T 三者的关系为TT 221, (11.7) 在国际单位制中,周期T 、频率ν和角频率ω的单位分别是秒 (s)、赫兹 (Hz)和弧度/ 秒 (rad /s).3.相位和初相位式(11.5)中 t 的称为简谐振动的相位 ,单位是弧度 (rad) .在振幅一定、角频率已知的情况下,振动物体在任意时刻的运动状态(位置和速度)完全取决于相位 t .这从下面的分析中会看得更清楚.将式(11.5)两边对时间求一阶导数,可以得到物体振动的速度).()sin(811 t A dtdx (11.8) 由式(11.5)和式(11.8) 两式可以看出,在振幅 A 和角频率ω已知的情况下,振动物体的位置和速度完全由相位所决定.我们已经知道,位置和速度是表示一个质点在任意时刻运动状态的充分而必要的两个物理量.相位中的φ称为初相位,在振幅A 和角频率ω已知的情况下,振动物体在初始时刻的运动状态完全取决于初相位φ.在式(11.5)和式(11.8)中令 ,则分别成为下面的形式sin cos A A x 00 (11.9) 分别是振动物体在初始时刻的位移和速度,这两个量表示了振动物体在初始时刻的运动状态,也就是振动物体的初始条件.振幅 A 和初相位φ,在数学上它们是在求解微分方程(11.3)时引入的两个积分常量,而在物理上,它们是由振动系统的初时状态所决定的两个描述简谐振动的特征量,这是因为由初始条件(11-9)可以求得)arctan(0022020x x A (11.10) 三、简谐振动的矢量图解法和复数解法简谐振动可以用一个旋转矢量来描绘.在坐标系O —xy 中,以O 为始端画一矢量A ,末端为 M 点,如图11.2 所示.若矢量A 以匀角速度ω绕坐标原点O 作逆时针方向转动时,则矢量末端 M 在 x 轴上的投影点P 就在 x 轴上于点O 两侧往复运动.如果在t = 0 时刻,矢量A 与 x 轴的夹角为φ,那么这时投影点P 相对于坐标原点O 的位移可以表示为cos A x式中A 为矢量 A 的长度.在任意时刻t,矢量 A 与 x 轴的夹角变为 t ,则投影点P 相对于坐标原点O 的位移为 )cos( t A x所以,当矢量A 绕其始点(即坐标原点)以匀角速度ω旋转时,其末端在x 轴上的投影点的运动,必定是简谐振动.图11.2(b)所描绘的曲线,是点P 的位移与时间的关系曲线,称为简谐振动曲线.以上是用一个旋转矢量末端在一条轴线上的投影点的运动来表示简谐振动,这种方法称为简谐振动的矢量图解法.这种方法以后在电学和光学中都要用到.简谐量x 还可以用复数来代表.若把一个复数表示为)sin()cos(~)( t iA t A Ae x t i (11.11) 显然,简谐量x 就是这个复数x ~的实部,并且简谐量的振幅与复数的模相对应,简谐量的相位与复数的幅角相对应.若要对多个简谐量进行某种运算,可以对代表这些简谐量的复数进行相同的运算,在运算过程中,实部和虚部、模和幅角总是分别运算而不会相混,所得的复数的实部就是这些简谐量进行该运算的最后结果.因此,简谐量的复数表示法也是常用的方法.例如,求振动速度和加速度,可以用复数进行运算.取位移的复数形式为)(~t i Ae x 振动速度的复数则为)(~~ t i Ae i dtx d 取速度复数的实部,就是振动速度的真正表示式)sin()]sin()cos(Re[ t A t A i t A i 2用同样的方法可以计算振动加速度)()(~~ t i Ae i dtx d a 222 加速度的真正表示式为)cos(])Re[()( t A Ae i a t i 22由上面的计算可见,用复数来代表简谐量,运算过程也是十分简便的.例题11.1有一劲度系数为 32.0Nm -1的轻弹簧,放置在光滑的水平面上,其一端被固定,另一端系一质量为 500g 的物体.将物体沿弹簧长度方向拉伸至距平衡位置10.0cm 处,然后将物体由静止释放,物体将在水平面上沿一条直线作简谐振动.分别写出振动的位移、速度和加速度与时间的关系.解:设物体沿 x 轴作简谐振动,并取平衡位置为坐标原点.在初始时刻 t =0,物体所在的位置在最大位移处,所以振幅为A = 10.0cm = 0.100 m振动角频率为1s rad 0085032 ..m k 如果把振动写为一般形式,即 x =Acos(ωt +φ),当t=0时,物体处于最大位移处,x =A,那么必定有cos φ=1.所以初相位φ=0.这样我们就可以写出位移与时间的关系为x = 0.100cos(8.00 t) m .速度和加速度的最大值分别为1s m 80 .A m 12s m 46 .A a m速度和加速度与时间的关系分别为1s m 0088000 t .sin . 2s m 008406 t a .cos .例题11.2已知某简谐振动的振动曲线如图11.3所示,试写出该振动的位移与时间的关系.解:任何简谐振动都可以表示为x =Acos(ωt +φ)关键是要从振动曲线求得振幅 A 、角频率ω、和初相位φ.振幅 A 可以从振动曲线上得到.最大位移的点 P 所对应的位移的大小就是振幅A = 4.0×10-2m .我们已经分析过,振动的初相位是由初始条件决定的,所以应该根据初始时刻的位移和速度来确定φ .t = 0 时的位移和速度分别由以下两式表示sin ,cos A A x 00从振动曲线上可以得到21210/cos / x ,再由振动曲线在 t = 0 附近的状况可知, 00 ,同时因为A 和ω都大于零,必定有sin φ<0 ,这样我们就可以确定,在t=0时旋转矢量是处于第四象限内,故取初相位为3/最后求角频率ω.从振动曲线可以看到,在t =1s 时,位移x =0,代入下式)/cos(.310042 t x233100402//)/cos(. 可得:因为ω>0,所以上式只能取正.所以1s rad 6523 这样,我们可以将该简谐振动具体地写为m 36510042)cos(. t x 四、简谐振动的能量从机械运动的观点看,在振动过程中,若振动系统不受外力和非保守内力的作用,则其动能和势能的总和是恒定的.现在我们以弹簧振子为例,研究简谐振动中能量的转化和守恒问题.弹簧振子的位移和速度分别由下式给出)sin(),cos( t A t A x在任意时刻,系统的动能为)(sin t A m m E k 22222121 (11.12)除了动能以外,振动系统还具有势能.对于弹簧振子来说,系统的势能就是弹力势能,并可表示为)(cos t kA kx E p 2222121 (11.13) 由式(11.12)和式(11.13)可见,弹簧振子的动能和势能都随时间作周期性变化.当位移最大时,速度为零,动能也为零,而势能达到最大值221kA ;当在平衡位置时,势能为零,而速度为最大值,所以动能达到最大值2221A m . 弹簧振子的总能量为动能和势能之和,即)(cos )(sin t kA t A m E E E p k 222222121 因为ω2=k/m,所以上式可化为2222121kA A m E (11.14) 由上式可见,尽管在振动中弹簧振子的动能和势能都在随时间作周期性变化,但总能量是恒定不变的,并与振幅的平方成正比.22222212121x A kA kx m E 由 (11.15) 上式明确地表示了弹簧振子中物体的速度与位移的关系.在平衡位置处,x=0,速度为最大;在最大位移处,x=±A ,速度为零.例题11.3一长度为l 的无弹性细线,一端被固定在A 点,另一端悬挂一质量为m 、体积很小的物体.静止时,细线沿竖直方向,物体处于点O,这是振动系统的平衡位置,如图11.4所示.若将物体移离平衡位置,使细线与竖直方向夹一小角度θ,然后将物体由静止释放,物体就在平衡位置附近往复摆动起来.这种装置称为单摆.证明单摆的振动是简谐振动,并分析其能量.解:我们选择小物体相对平衡位置O 的角位移θ为描述单摆位置的变量,并规定物体处于平衡位置右方,θ为正,处于平衡位置左方,θ为负.小物体受到两个力的作用,一个是重力mg,另一个是细线的张力 f .沿着物体运动的弧形路径,将重力mg 分解成大小为mgcos θ的径向分量和大小为 mgsin θ的切向分量.其中径向分量mgcos θ与细线的张力 f 一起为物体的运动提供向心力,而切向分量是作用于物体的回复力,使物体返回平衡位置,其作用与弹簧振子的弹性力一样.因此,单摆的振动方程为mg mg dtd ml 很小sin 22 (1) )(lg dt d 22220即 (2) 显然,单摆的振动方程(2)与弹簧振子的振动方程完全相似,只是用变量θ代替了变量x.所以单摆的角位移θ与时间t 的关系必定可以写成余弦函数的形式 )cos( t 0式中积分常量0 为单摆的振幅,φ为初相位.这就证明了,在摆角很小时单摆的振动是简谐振动.单摆系统的机械能包括两部分,一部分是小物体运动的动能)(sin )( t ml l m m E k 2220222212121 另一部分是系统的势能,即单摆与地球所组成的系统的重力势能)cos ( 1mgl mgh E p式中h 是当角位移为θ时物体相对平衡位置上升的高度.可将cos θ展开为!!!cos 6421642 因为θ很小,我们可以只取上式的前两项.所以可以化为)(cos t mgl mgl E p 22022121 可见,单摆系统的动能和势能都是时间的周期函数.单摆系统的总能量等于其动能和势能之和,即)(cos )(sin t mgl t ml E E E p k 220222022121 因为ω2=g/l ,所以上式可以化为2020222121 mgl ml E 上式表示,尽管在简谐振动过程中,单摆系统的动能和势能都随时间作周期性变化,但总能量是恒定不变的,并与振幅的平方成正比.作业(P97):4、7、9、11、14。
大学物理第十一章

体积模量 :
p
p 0, V 0; p 0, V 0
返回 退出
§11-4 波的能量 波的强度
一、波的能量
平面简谐波
y( x, t )
Acos[(t
x) u
0 ]
考虑介质中体积元为V质量为m (m=V )的质元。
可以证明
Ek
Ep
1 2
A22 (V
) sin
2[(t
x) u
0 ]
体积元的总机械能
返回 退出
四、介质的形变及其模量
1. 线变
正应力: F/S 线应变: l/l
F E l
FS
F
S
l
l
弹性模量 :E
l+l
2. 切变
F
F G 切变角:
S
S
切变模量: G
返回 退出
3. 体变
p
压强为p时,体积为V;
压强为p+Δp时,体积为V+ΔV。 p V V p 体应变: V/V
p Κ V V
π
0.0021
5
x 10
3
0.1103 sin 5πx (m)
返回 退出
例11-3 一横波沿一弦线传播。设已知t =0时的波形曲 线如图中的虚线所示。波速 u=12 m/s,求:(1)振幅; (2)波长;(3)波的周期;(4)弦上任一质点的最大速率; (5)图中a、b两点的相位差;(6)3T/4时的波形曲线。
纵波:质点的振动方向和波动的传播方向相平行。 波形特征:存在相间的稀疏和稠密区域, 如声波。
返回 退出
弹簧中的纵波
返回 退出
三、波阵面和波(射)线
波阵面:振动相位相同的点所构成的面。 波前:最前面的那个波阵面。 波线:表示波的传播方向的有向线段。
大学物理第十一章

解:音叉尖端的振动机械能为
E 1 1 m 2 A2 m(2 ) 2 A2 2 2
1 0.05 (2 480) 2 (1.0 103 ) 2 2
0.227(J)
上页 下页 返回 帮助
11-1 黑体辐射 普朗克量子假设 第十一章 量子物理基础
eU0 Ek max B C
•上页 •下页 •返回 •帮助
11-2 光的量子性 2.截止频率(红限) 0
第十一章 量子物理基础
图中直线在频率坐标轴上的截距 0 ,称为截止频率(或红 限),它是使某种金属产生光电效应的入射光的最小频率.
几种纯金属的截止频率 金属 铯 截止频率 0 / 1014 Hz 4.55 钠 锌 银 铂
y
v0 0
碰撞前 电子
y
x
光子
x
电子 碰撞后
p h
光子动量大小
根据相对论理论 电子的质量
m
m0
1 2 / c2
•上页 •下页 •返回 •帮助
11-2 光的量子性
由能量守恒得
第十一章 量子物理基础
m0c2 h 0 mc2 h
mc (
2
hc
平方得
0 hc 2 hc 2 h2c 2 hc hc 2 4 2 4 m c ( ) ( ) 2 2( )m0c 2 m0 c 0 0 0
5.辐射能量 T 温度下的黑体在单位时间内从单位面积上辐射的 能量即等于波长分布曲线下的 面积。
M (T )
M 0 (T ) M (T )d
0
大学物理-第十一章静磁学C
例11-24 图示为三种不同的磁介
质的B~H关系曲线,其中虚线表示 B
a
的是B=oH的关系。a、b、c各代
表哪一类磁介质的B~H关系曲线:
b
a代表铁磁质 的B~H关系曲线。
c
b代表顺磁质 的B~H关系曲线。
H
c代表抗磁质 的B~H关系曲线。
抗磁质和顺磁质的B和H间是线性关系, 相对磁导率r
与1相差不大。在一般性(精度要求不高)的问题中,可
χmH
其中m叫磁介质的磁化率。
由:
H
B
M
μo
得: B 0 (H M ) 0 (1 m )H
可证明1+m=r相对磁导率, or= 磁导率, 则
B μ0 μr H μH
21
磁场强度
真正有物理意义的, 对磁场中的运动电荷或 电流有力的作用的是B而不是H, 磁学中H仅 是一个辅助量, 相当于电学中的D,由于历史
M
dL
I
dt
dL Mdt
dL垂直于磁矩和磁场构成的平面,在虚线的圆周上, 绕磁场转动。
7
因此抗磁质中
B
B0
B
B0
这是抗磁性的重要表现。
(2)顺磁质:
pm Δpm pm 0 称为取向磁化。
分子的固有磁矩pm产生的附加磁场B´的方向总是 与外磁场Bo的方向相同, 因此顺磁质中
求解思路
选高斯面
(2)由
求 (3)由
(2)由
D dS
s
q0
(S内)
求
D E
D
(3)由
0 r
H dl l
I o内
H
B 0rH 求 B
求E
24
大学物理C11

y1 A cos t y 2 A c o s ( t )
y 3 A c o s ( t 2 )
A 1 A 2 A3
s N 在 P 点 的 振 动 : y N A c o s [ t ( N 1 ) ] A N
条纹分布
四、光栅分辨本领
恰能分辨的2条谱线:1 , 2 平均波长: 1 2
2
波长差: 2 1
设2条谱线: , 的 k级 主 极 大 :
R
--光栅色分辨本领
d s in k ( )
2
分辨本领: R kN
2N
N 491 2
光栅最小宽度: L N d 1.16mm
0.6nm
干涉和衍射的区别: 多缝干涉: 缝宽较大:
缝宽较小:
演示
相邻两缝到P点的光程差: d s in
2 d s in
P
当 2k 即 d s in k 时
s1
P点振动加强
s2
(a b ) s in k
--明纹:主明纹(主极大)
s3
k 0, 1,2,
s1在 P点 的 振 动 : s2在 P点 的 振 动 :
2)若透镜焦距为f,主明纹位置:
x k f tan k
2)主明纹位置只取决于d,f
与N无关
演示
例:
o
6000 A
的光垂直入射到光栅上
测 得 第 一 级 衍 射 角: a rcs in 0 .1 第 4,6级 缺 级
大学物理C11-5

人接收1个完整波所用时间:u VR 人单位时间接收的波的个数:u VR
波源
u
人
VR
R
u VR
u VR
u /
u VR
u
b、人远离波源
R
u
VR
u VR
u
u
人
波源
VR
演示
二、波源运动VS≠0, 人不动VR=0
S
R
a、波源接近人
S VSTS S’
V u
反射面
R反
u VR u
反
R反 : 人 对 反 射 波 的 接 收 频 率
已知: s 1080 Hz ,Vs 30m / s,VR 65m / s, u 331m / s
求:(1)波源发出的声音波长
u,
(2)每秒到达反射面的波数
(3)反射波速率
(4)反射波波长
u VR u Vs
s
同理:
R
(V R
|| ||
u)
u)
(Vs || u) (VR || u)
说明:
(1)当Vs、VR两者中有一个不等于0,则: R s
=>多普勒效应
(2)
R
u VR u Vs
s
已知: Vs ,VR ,V , u, s 求: R反 ?
解:
入
u u Vs
s
入: 入 射 波 频 率
s
VR
Vs
R'
uV u
入
R': 反射面的接收频率
大学物理第十一章光学第9节 衍射光栅汇总

11-9 衍射光栅
光栅是由大量的等宽等间距的平行狭缝(或反射面)
构成的光学元件。从广义上理解,任何具有空间周期
性的衍射屏都可叫作光栅。
衍射角
L
P
Q
o
f
第十一章 光学
1
物理学
11-9 衍射光栅
第五版
二 光栅衍射条纹的形成
衍射角
b
b'
b b'
光栅常数
(b b')sin
b :透光部分的宽度 b’ :不透光部分的宽度
栅出现最高级次光谱的条件: d·sin90º= kmax紫
d sin k d和k相同时: 越大 越大, 离中央明纹越远
各级明纹为彩色条纹;中央零级明纹中心是白色的; 边缘是彩色条纹(紫在内红在外)
第十一章 光学
13
物理学
第五版
11-9 衍射光栅
例如 二级光谱重叠部分光谱范围
(b b') sin 3紫
k2
b b'
3 7.6105cm 1cm 6500
1.48
1
不4 第三级光谱所能出现的最大波长
' (b b')sin90 b b' 513 nm 绿光
11-9 衍射光栅
(k 0,1,2,)
k 1,
s in k 1
sink
b b'
光栅常数越小,明纹越窄,明纹间相隔 越远.
一定,b b' 减少, k1 k 增大.
入射光波长越大,明纹间相隔越远.
b b' 一定,增大, k 1 k 增大.
第十一章 光学
8
物理学
第五版
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例11-2 在一密闭教室内,一个人呼吸时,如果每呼 出的一口气都在若干时间内均匀地混合到全教室的空 气中,那么另一个人每吸入的一口气中有多少份子是 那个人在那口气中呼出的?设教室内空气的体积为V, 压强为p,温度为T,人们每呼吸一口气的体积约为V1.
温度T :表示物体的冷热程度。
热力学温标 T(K)
温标 摄氏温标 t( c)
华氏温标 tF (F )
T t 273.15
tF
9t 5
32
2. 平衡态与准静态过程
第11章 热力学基础
(1)平衡态: 在没有外界影响的情况下,气体的 状态参量都具有确定的值且不随时 间变化。
(2)准静态过程
平衡态1
p /(1.0105 Pa)
A 2
1
B
0
2 3 V /(1.0 10 3 m3 )
A V2 pdV V1
方法一: 先求得p=p(V); 后代入积分
方法二:功=p-V图中过程曲线与横轴所包围的面积
第11章 热力学基础
微小过程中的功: p
dA
V1 V2
V
dA pdV
若dV>0,则dA>0; 若dV<0,则dA<0; 若dV=0,则dA=0.
(2)功A
第11章 热力学基础
足够缓慢地移动活塞,使气 体经历准静态过程,则移动
微小位移 dl 时 气体对外做功 dA F dl pSdl cos 00 pdV
A V2 pdV V1
(准静态过程) 功是过程量
第11章 热力学基础
练习 如图,一定量的空气,从状态A沿直线AB 变化到状态B,求此过程中气体做的功。(150J)
热力学第一定律实际上是涉及热运动和机 械运动的能量转换及守恒定律。
第一类永动机是不可能制成的。
第一类永动机:系统不断经历状态变化后回到初态 (不消耗内能),不从外界吸热,只对外做功
即:E 0, Q 0, A 0
违反热力学第一定律,所以不可能成功。
(1) 等容过程 (dV=0 V=c )
平衡态2
准静态过程:每一个中间状态都近似为平衡态的过程
第11章 热力学基础
(3)热力学第零定律 同一平衡态的所有热力学系统都有共同的温度。
3. 理想气体的状态方程
pV m RT RT
M
摩尔气体常量 R 8.31J mol1 K 1
混合理想气体的压强:道尔顿分压定律 p=p1+p2+…+pn
热运动 热运动
第11章 热力学基础
2.热力学第一定律
系统从外界吸收热量Q,一部分用来对外作功, 一部分使系统的内能改变。
Q A (E2 E1) A E
第一定律的符号规定
Q
E
A
+ 系统吸热 内能增加 系统对外界做功
系统放热 内能减少 外界对系统做功
微小过程: dQ dE dA
第11章 热力学基础
dA
系统对外界做正功
外界对系统做正功
循环过程的功
思考:是否满足V2>V1的任何过程中均有A>0?
第11章 热力学基础
(3)热量Q 热量也是一过程量。 系统和外界之间由于存在温度差而传递的能量。
E改变 方式
特点
能量转换
做功
与宏观位移相联系
机械
通过非保守力做功实现 运动
热运动
与温差相联系 热传递 通过分子碰撞实现
第11章 热力学基础
第11章 热力学基础
内容: 1. 平衡态 理想气体物态方程 2. 热力学第一定律及其应用 3. 循环过程 卡诺定理 4. 热力学第二定律 5. 熵 熵增加原理
重点:热力学第一定律及其应用
难点:熵、熵增加原理
热力学第一定律的 创始人
第11章 热力学基础
热力学第二定律的 创始人
第11章 热力学基础
热力学能E 是状态函数 热力学能变化ΔE只与始末状态有关,与
所经过的过程无关,可以在初、末态间任选 最简便的过程进行计算。
思考:当理想气体的状态发生改变时, 热力学能一定跟着改变?
做功 热力学能变化方式
热传递
作机械功改变系统 内能的焦耳实验
第11章 热力学基础 作电功改变系统
内能的实验
A V
1850年焦耳首先测定热功当量的实 验。由于砝码的下落带动桨叶旋转, 使得绝热容器内的水温升高。
第11章 热力学基础
等温过程 pV 常量 (玻意尔-马略特定律) 等容过程 p 常量 (盖-吕萨克定律)
T 等压过程 V 常量 (查理定律)
T
理想气体:在任何情况下都遵守以上三个试验定律 和阿伏加德罗定律的气体。
阿伏加德罗定律:在标准状态下,1摩尔任何气体所 占有的体积为22.4升。
第11章 热力学基础
物理量。
几何参量(气体体积) 力学参量(气体压强) 热学参量(气体温度、熵) 化学参量(混合气体各化学组成的质量) 电磁参量 (电场强度、磁场强度)
第11章 热力学基础
体积V: 气体分子无规则运动所能到达的空间。
压强 p: 分子碰撞器壁,容器壁上单位面积所受
到的正压力。
1Pa 1N / m2 1atm 76cmHg 1.013 105 Pa 1工程大气压 9.80665 104 Pa
1. 热力学能、功和热量
(1)热力学能E(热力学系统的能量)
由系统内所有分子的热运动动能和分子间相 互作用势能两部分组成。 E E(T,V )RT
M2
分子自由度
单原子分子 i 3
刚性双原子分子 i 5 刚性多原子分子 i 6
第11章 热力学基础
热力学系统:大量粒子组成的宏观、有限的体系。 与其比邻的环境称为外界.
开放系统:与外界有 质量m、能量E 交换
封闭系统:与外界有 E 交换,无 m 交换
孤立系统:与外界无 E、m 交换
例 开放系统
封闭系统
绝 热
孤立系统
第11章 热力学基础
11.1 平衡态 理想气体物态方程
1. 气体的物态参量 描述热力学系统宏观状态的
第11章 热力学基础
例11-3 一绝热的密闭容器中有一隔板,将容器分成 体积相同的A、B两部分。开始时,A中有一定量的氮 气,压强为p1,温度为T1;B中有一定量的氧气,压 强为p2,温度为T2。抽出隔板后,两种气体互相混合, 求混合理想气体的压强与温度。
第11章 热力学基础
11-2 热力学第一定律及其应用