基于并列选择遗传算法的太阳影子定位方法
《2024年基于太阳阴影轨迹的经纬度估计技术研究》范文

《基于太阳阴影轨迹的经纬度估计技术研究》篇一一、引言近年来,随着科技的进步与人们对空间地理信息的关注,地理定位技术的开发与研究成为了热门话题。
在众多定位技术中,基于太阳阴影轨迹的经纬度估计技术以其独特的原理和特点,吸引了广大科研工作者的注意。
本文将深入探讨基于太阳阴影轨迹的经纬度估计技术的研究现状、方法以及未来发展趋势。
二、研究背景与意义太阳阴影轨迹与地理位置之间存在着密切的关系。
通过分析太阳阴影在不同时间、不同地点的变化规律,可以推算出该地的经纬度信息。
这种技术不仅具有较高的定位精度,而且无需额外的硬件设备,具有广泛的应用前景。
在军事、农业、环保、城市规划等领域,经纬度估计技术都有着重要的应用价值。
三、研究方法与技术原理1. 技术原理基于太阳阴影轨迹的经纬度估计技术主要依赖于太阳运动规律和地球自转原理。
通过分析太阳光线的投射角度和方向,结合地点的地理特征,可以推算出该地的经纬度信息。
2. 研究方法(1)数据采集:收集不同地点、不同时间段的太阳阴影数据,包括阴影的长度、方向等信息。
(2)数据处理:利用专业的软件对收集到的数据进行处理,提取出有用的信息。
(3)算法研究:根据太阳运动规律和地球自转原理,研究出适用于经纬度估计的算法。
(4)实验验证:通过实地实验和模拟实验,对算法进行验证和优化。
四、研究现状与进展目前,基于太阳阴影轨迹的经纬度估计技术已经取得了较大的进展。
许多学者通过深入研究,提出了多种不同的算法,提高了定位精度和效率。
同时,随着计算机技术和传感器技术的不断发展,该技术在数据处理和实时定位方面也有了较大的突破。
然而,该技术仍存在一些问题,如受天气、环境等因素影响较大,需要进一步优化和完善。
五、技术难点与挑战基于太阳阴影轨迹的经纬度估计技术面临的技术难点和挑战主要包括以下几个方面:1. 数据准确性:太阳阴影数据的准确性直接影响到经纬度估计的精度,因此需要采取有效的方法提高数据采集和处理的准确性。
《2024年基于太阳阴影轨迹的经纬度估计技术研究》范文

《基于太阳阴影轨迹的经纬度估计技术研究》篇一一、引言随着科技的发展,全球定位系统(GPS)已成为我们日常生活中不可或缺的一部分。
然而,在某些特殊场景或特定应用中,如无人机的定位、森林探索、探险任务等,依赖传统GPS信号可能会面临困难或误差较大。
因此,我们可以通过基于太阳阴影轨迹的经纬度估计技术作为GPS的一种补充和优化。
该技术基于天文学和地球物理学的原理,通过分析太阳光照射在不同地物上产生的阴影轨迹,进行间接的经纬度计算。
本文将对该技术进行深入的研究与探讨。
二、技术原理基于太阳阴影轨迹的经纬度估计技术,主要是利用太阳与地球的位置关系以及地物阴影的变化规律,通过图像处理和模式识别技术,对太阳阴影轨迹进行测量和分析。
具体原理如下:1. 太阳位置计算:根据天文算法,计算太阳在地球上的位置。
这需要知道当前的日期、时间以及地球的经纬度等参数。
2. 阴影轨迹测量:利用高分辨率相机或传感器,对地面上太阳阴影轨迹进行测量。
这需要选择合适的地点和角度,确保阴影清晰可见且不受其他光源干扰。
3. 图像处理与模式识别:通过图像处理和模式识别技术,对测量得到的阴影轨迹图像进行分析和处理,提取出有用的信息。
4. 经纬度计算:根据太阳位置和阴影轨迹的信息,结合一定的数学模型和算法,进行经纬度计算。
三、技术实现基于太阳阴影轨迹的经纬度估计技术实现主要包含以下几个步骤:1. 硬件设备选择:选择合适的相机或传感器设备,确保其具有高分辨率和良好的图像稳定性。
2. 图像采集:在合适的地点和时间,对太阳阴影轨迹进行图像采集。
3. 图像预处理:对采集到的图像进行预处理,如去噪、增强等操作,以便后续的图像分析和处理。
4. 特征提取:通过图像处理和模式识别技术,提取出太阳阴影轨迹的特征信息,如长度、宽度、形状等。
5. 经纬度计算:结合提取的特征信息和地球的地理信息,通过一定的数学模型和算法进行经纬度计算。
6. 结果输出与验证:将计算得到的经纬度结果进行输出和验证,与实际经纬度进行比较和分析。
《2024年基于太阳阴影轨迹的经纬度估计技术研究》范文

《基于太阳阴影轨迹的经纬度估计技术研究》篇一一、引言随着科技的发展,人们对地理定位和位置估计的需求越来越强烈。
在众多定位技术中,基于太阳阴影轨迹的经纬度估计技术因其独特的原理和实用性受到了广泛关注。
本文将重点研究这一技术,通过对其原理、方法和应用场景的探讨,为相关领域的研究提供参考。
二、太阳阴影轨迹的原理太阳阴影轨迹定位技术利用太阳与地球的相对位置关系,通过测量太阳阴影的轨迹来估计经纬度。
地球自转导致太阳位置随时间变化,进而产生不同的阴影轨迹。
根据这些轨迹的规律,可以推算出观测点的经纬度信息。
三、技术方法与实现1. 数据采集:通过传感器设备采集太阳阴影在不同时间点的轨迹数据。
这些数据应包括时间、光照方向、强度等信息。
2. 数据预处理:对采集到的原始数据进行清洗、筛选和格式化处理,以备后续分析使用。
3. 算法处理:采用数学模型和算法对预处理后的数据进行处理,提取出有用的信息。
这一步骤需要用到地理学、天文学和计算机科学的相关知识。
4. 经纬度估计:根据提取出的信息,结合地理坐标系统和地图数据,估算出观测点的经纬度。
四、技术难点与挑战1. 精确测量:太阳阴影轨迹的测量需要高精度的传感器和设备,以确保数据的准确性。
2. 算法优化:数据处理和经纬度估计需要高效的算法支持,以提高定位速度和精度。
3. 环境因素:天气、光照、地形等因素可能影响太阳阴影轨迹的规律性,需要综合考虑这些因素对定位精度的影响。
4. 数据融合:将多种定位技术融合在一起,提高定位的准确性和可靠性。
五、应用场景与前景1. 户外定位:在无网络或网络信号弱的户外环境中,基于太阳阴影轨迹的定位技术可以提供有效的经纬度估计。
2. 灾害救援:在地震、洪水等灾害发生后,可以通过该技术快速确定救援人员的位置,提高救援效率。
3. 农业应用:在农业领域,该技术可用于农田管理、作物生长监测等方面。
4. 科研领域:在地理学、天文学、气象学等科研领域,该技术可用于观测和研究地球自转、公转等天文现象。
基于数学模型的太阳影子定位问题研究

基于数学模型的太阳影子定位问题研究周千;李文胜【摘要】针对太阳影子的定位问题,通过分析影响影子长度的各个参数,建立了影子变化的数学模型.同时,根据某固定直杆在水平地面上的太阳影子顶点坐标数据,通过建立数学模型确定了直杆所处的地点以及视频拍摄的时间.该模型在实际生活中有着极为广泛的应用,具有一定的实际意义.【期刊名称】《西安航空技术高等专科学校学报》【年(卷),期】2016(034)003【总页数】4页(P76-79)【关键词】太阳影子定位;数学模型;太阳高度角【作者】周千;李文胜【作者单位】西安航空学院理学院,陕西西安 710077;西安航空学院理学院,陕西西安 710077【正文语种】中文【中图分类】O242随着数字视频在生活中的广泛应用,对于所拍摄的视频,在特殊情况下,需要确定视频的拍摄地点和拍摄日期,太阳影子定位技术[1-2]就是通过分析视频中物体的太阳影子变化,确定视频拍摄的地点和日期的一种方法。
本问题源自于2015年全国大学生数学建模竞赛A题。
原问题要求建立影子变化的数学模型,并分析影子长度关于各个参数的变化规律,同时,根据某固定直杆在水平地面上的太阳影子顶点坐标数据,通过建立数学模型确定直杆所处的地点以及视频拍摄的时间。
本文探讨了相关的问题,并给出了相应的数学模型。
假设地球为球体,建立空间直角坐标系如图1所示。
以地球球心为坐标原点,z轴正方向指向N极,xOy坐标平面与赤道面重合,则可得球面方程:如图1所示,纬度φ是指某点与地球球心的连线和地球赤道面所成的线面角;时角t为该天体的赤经(RA)与当地的恒星时(LST)的差值,即当地时间12点时的时角为零,前后增加=15°/h。
不妨将太阳光线看作向量=(-cosδ,0,sinδ),通过点A(x0,y0,z0)作球面的切平面,其法向量。
太阳高度角θ是指太阳光的入射方向和地平面之间的夹角,上图所作切平面即为地平面。
可得太阳高度角公式:太阳赤纬δ,即太阳直射点的纬度,计算公式[3]:由于中国采取的是北京时区的区时作为所在的东八区时间,但北京时间并不是北京(东经116.4°)地方的时间,而是东经120°地方(约为陕西蒲城)的地方时间。
基于数学模型的太阳影子定位问题研究

基于数学模型的太阳影子定位问题研究作者:王者来源:《中国科技博览》2019年第12期[摘要]太阳影子定位技术在许多领域中都应用颇多。
本文针对太阳影子定位问题,通过对影响物体影长的各个参数进行分析计算,建立基于太阳高度角变化的直杆影长变化模型,得到直杆影长与赤纬角,时角等变量的函数关系式并以天安门广场某时段为例,运用控制变量的方法分析影长关于各因素的变化规律并作出直杆影长随时间变化曲线。
最后,本文通过实际测量的方法对模型进行检验,得到模型结果相对实际测量值的误差约为1.732%,模型有较高的精度。
[关键词]太阳影子定位;控制变量;几何分析; MATLAB中图分类号:TP161 文献标识码:A 文章编号:1009-914X(2018)12-0028-03一、模型的建立与求解1.1模型的建立与求解1.1.1名词解释(1)太阳高度角[1]:指太阳入射方向与地面之间的夹角,通常来说某地的太阳高度角是指该地太阳光线与通过该地地表切面的夹角。
(2)太阳赤纬角[2]:指赤道平面与太阳和地球中心的连线之间的夹角。
即太阳直射点的纬度值。
(3)太阳时角:赤道坐标系中,以午圈为起始圈,太阳所在经度圈与起始圈的夹角(向西度量)。
注:具体几何示意图见图2。
(4)格林尼治时间GMT:即格林尼治所在地的标准时间,格林尼治是地球本初子午线的标界处,是世界计算时间和经度的起点。
(GMT+8)h即为北京时间。
1.1.2模型的建立直杆与其在地面上投影的几何关系如图1所示:对于固定于地面某一点的直杆而言,其投影点位置与太阳高度角有关,影子长度有:(1)其中,为直杆长度,为太阳高度角。
地球上某一点的太阳高度角之值取决于此点的纬度,某一确定时刻的太阳赤纬角和太阳时角 [3],其几何关系如图2所示:图1 直杆投影几何示意图图2 赤纬角和时角几何示意图其函数关系如式(2)所示:(2)首先,本文进行太阳赤纬角的推导,赤纬角有:(3)其中:(4)为一年中特定日期表示的角分数,有:(5)其中,为某日期的积日,积日即为日期在年内的序列号,如1月1日的积日为1,以此类推。
2015年全国大学生数学建模竞赛A题
太阳影子定位技术问题的数学模型摘要本文涉及的是太阳影子定位技术问题。
在已知视频中物体的太阳影子变化的情况下,要确定视频的拍摄地点和拍摄日期。
首先,分析了文中四个问题的关系,发现前三个问题的已知条件逐步减少,问题难度依次递进。
第四问则给出一个实际问题,该问题需要转化成数学模型利用前三问的方法求解;随后,建立了L-G模型、MinZ-模型等,并应用非线性最小二乘法、遗传算法等算法对模型求解。
得到基于模型的合理结果。
最后,将第四问的实际问题转化数学模型并求解,进而解决问题。
对于问题一,要解决的问题是杆长与影子长度的关系,根据天文、几何知识,我们建立了模型来刻画问题给出的参数之间联系,如赤纬角模型、时角模型、太阳高度角模型、影子长度模型(L-G模型)等;分析了各参数对影子长度的影响;最后运用MATLAB绘制出具体给定参数下的3米高直杆的影子变化曲线;从曲线可以看出在9:00到15:00这段时间里,影子长度先变短后变长,最短为3.627米,最长为7.182米。
问题二提供了一个关于时间、影子坐标的附件1,杆长未知,为了确定直杆所处的地点,本问建立了MinZ-模型,首先将经度、纬度、杆长离散化,搜索出大概的可行解,然后运用非线性最小二乘算法,选取matlab中的lsqcurvefit命令,以可行解为初值,再运用非线性最小二乘算法,选取MATLAB中的lsqcurvefit命令,在控制残差在10−8之内范围的情况下得到了三个可能地点皆在海南省昌江县内,最小误差的地点为海南省江黎族自治县,北纬19.3025°,东经108.6988°,此时对应直杆高度为2.0219m。
同时,将结果代入问题一的模型进行检验,验证了模型的稳定性和算法的合理性。
问题三沿用问题一的模型和问题二的算法,由于一个已知量变成一个变量,根据算法特点,在增加一个变量的情况下,算法搜索影长差时只需要增加一重循环。
关于附件2数据,残差最小对应的位置为北纬39.8926°,东经79.7438°,具体地点在新疆维吾尔自治区喀什地区巴楚县。
基于遗传算法的太阳影子定位模型及研究

度,进而计算出目标函数值 fi +1, j +1 ,与 fi +1, j +1 进行比较:
fij , f = fi +1, j +1 , Dij , d = Di +1, j +1 ,
D 为网格化的矩阵, d 为优化的经纬度坐标。
fij > fi +1, j +1 fij ≤ fi +1, j +1 fij > fi +1, j +1 fij ≤ fi +1, j +1
其中, φ0 为附件 1 初始经度, t0min 为附件 1 杆影最短时刻。 3.2.2. 基于启发式算法的太阳影子定位模型 根据直杆在水平面上的影子顶点数据推断可能的地点,本文通过确定约束条件,以求解的竿影长和 实际竿影长的相似度作为目标函数,建立基于启发式算法的太阳影子定位模型,具体步骤如下:
70
张慧
太阳光线
直杆 太阳高度角
Figure 1. Sketch map: The sun’s rays, rod and its shadow 图 1. 太阳光线、杆与其影子所成示意图 Table 1. Shadow length changes over time 表 1. 影长随时间变化(数据来自全国大学生型中所使用的符号释义如下:
符号 s l h 符号说明 直杆的影子长度 直杆的高度 太阳高度角 纬度 经度 日数 北京时间
δ φ
N t
3. 模型介绍及实例分析
3.1. 影子长度变化的模型建立
太阳光线照射过杆,使杆、影子与太阳光线形成一直角三角形,如图 1 所示。
Hans Journal of Data Mining 数据挖掘, 2016, 6(1), 68-80 Published Online January 2016 in Hans. /journal/hjdm /10.12677/hjdm.2016.61009
基于太阳影子定位的推算方法
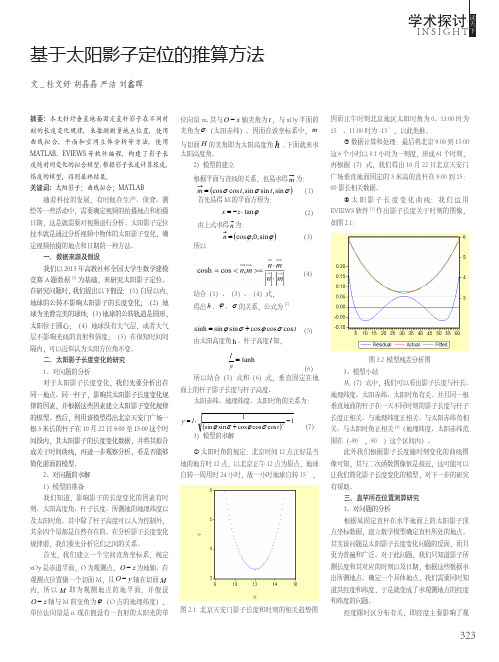
图 2.1 北京天安门影子长度和时刻的相关趋势图
经度跟时区分布有关,即经度主要影响了观
323
INSIGHT
学术探讨
324
读天下
测地的地方时。因此我们可以通过观测地的地方时 的正午时刻与北京正午时刻的时差的计算,从而得 出观测地的经度。相较于经度,纬度更难求。所测 地的地理纬度、太阳赤纬、太阳时角决定了该地的 影子变化规律,并且在上述问题中我们利用了一个 模型来模拟了这种规律。所以在此问题中,我们就 可以通过建立简化的方程与原方程之间的联系来确 定观测地的纬度。 2、对问题的求解 1)模型的准备 - 简化的影子变化函数模型 利用问题一最后得出的 10 月 22 日,北京天 安门处一垂直地面的直杆影子长度在 9:00 到 15:00 这个时间段内随时间变化的函数图像,从直观上 看,其近似于一个二次函数图像,现在我们就利用 EVIEWS 软件做二次函数来拟合它。如图 3.1:
sinh = sin ϕ sin σ + cos ϕ cos σ cos t (5)
由太阳高度角 h 、杆子高度 l 知,
(6) 所以结合(5)式和(6)式,垂直固定在地 面上的杆子影子长度与杆子高度、 太阳赤纬、地理纬度、太阳时角的关系为:
l = tanh y
图 3.2 模型残差分析图 3、模型小结 从(7)式中,我们可以看出影子长度与杆长、 地理纬度、太阳赤纬、太阳时角有关。并且同一根 垂直地面的杆子在一天不同时刻的影子长度与杆子 长度正相关、与地ቤተ መጻሕፍቲ ባይዱ纬度正相关、与太阳赤纬负相 (7) 关、与太阳时角正相关 [4](地理纬度、太阳赤纬范 围在(-90°,90°)这个区间内)。 此外我们根据影子长度随时刻变化的曲线图 像可知,其与二次函数图像很是接近,这可能可以 让我们简化影子长度变化的模型,对下一步的研究 有帮助。 三、直竿所在位置测算研究 1、对问题的分析 根据某固定直杆在水平地面上的太阳影子顶 点坐标数据,建立数学模型确定直杆所处的地点。 其实该问题是太阳影子长度变化问题的反面,而且 更为普遍和广泛。对于此问题,我们只知道影子所 测长度和其对应的时刻以及日期,根据这些数据求 出所测地点。确定一个具体地点,我们需要同时知 道其经度和纬度,于是就变成了求观测地点的经度 和纬度的问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第35卷第1期2017年2月陕西科技太摩摩裉Journal of Shaanxi University of Science & TechnologyVol.35 No.1Feb.2017关文章编号:1000-5811 (2017)01-0193-05基于并列选择遗传算法的太阳影子定位方法于鹏\刘泽锋2,郭改慧\陆金巧\吕杨1(1.陕西科技大学文理学院,陕西西安710021: 2.陕西科技大学机电工程学院,陕西西安710021)摘要:根据“立竿见影”和竿影日照图的原理,提出了一种太阳影子定位方法.首先结合太阳 高度角、太阳赤綷角,以理论影长和实际影长的相关系数最大和其误差平方和最小为目标函数 建立了求太阳影子定位的多目标优化模型,并以测量地的经綷度作为设计变量,运用并行选择 的遗传算法进行求解,实现了对测量地的精准定位.最后通过实例分析,指出与传统的枚举算 法相比,本文采用的遗传算法的求解结果无论在精度还是在收敛速度上都优于传统的枚举算法.关键词:太阳影子定位;多目标优化;并行选择;遗传算法中图分类号:TP391 文献标志码:APositioning method by the shadow of the sun based onparallel selected genetic lgorithmYU Peng1,LIU Ze-feng2,GUO Gai-hui1,LU Jin-qiao1,LV Yang1(1. School of Arts and Sciences,Shaanxi University of Science Technology,Xi^an 710021, China;2. College of Mechanical and Electrical Engineering,Shaanxi University of Science Technology,X i’an 710021,China)Abstract:According to the natural phenomenon that produces a shadow of objects under direct sunlight and the formation principle of stick sunlight shadow chart,the positioning method by the shadow of the sun is bined with relevant knowledge such as solar altitude and declination of sun.The multiple object optimization model,whose objective function is the maximum of correlation coefficient and the minimum of error sum of squares about practical and theoretical shadow7s length,is built.Regarding longitude and latitude of measure area as design variables,the measure area is confirmedwith parallelism selection genetic algorithm.In the analysis of case,compared with enumeration method,there is the truth that,the result by genetic algorithm is more accurate and the solution speed is faster than enumeration method.Key words:positioning by the shadow of the sun;multiple object optimization;parallelism selection;genetic algorithm收稿日期=2016-07-21基金项目:国家自然科学基金项目(11401356)作者简介:于鹏(1981 —),男,宁夏永宁人,讲师,硕士,研究方向:不确定推理•194 •f矣备科技大嗲#裉第35卷〇引言“立竿见影”现象揭示了在某地一根直立的杆,一天之内其影子的长度随太阳位置的变化而变化的自然规律,在这种自然现象中,影长的变化与杆所在的位置有着密切的联系.通过观察一个直杆的影长随时间的变化情况,确定直杆所在的位置,具有积极的科学意义与应用价值.例如在建筑物的采光设计[1]中,可以用竿影日照图的原理来求某地的建筑物投射的影长,进而来确定建筑物的采光条件.再比如在光伏阵列的设计[2]中,可以通过建立地理经纬度与影长的数学模型来求得光伏阵列所在地的遮挡物的影长变化,进而合理设计阵列的排布间距.因此,设计一种简洁实用的算法,来实现太阳影子的定位就显得尤为重要.遗传算法是20世纪70年代兴起的一种全新的仿生优化算法,它是在模拟达尔文生物进化论和孟德尔遗传学理论基础上发展起来的一种概率优化搜索算法.遗传算法一经提出,便引起了广泛的关注[3_8],众多作者根据不同的目的,提出了一系列改进的算法.例如,以解决单目标问题为目的的顺序选择、大变异、自适应等遗传算法,以及以解决多目标问题为目的的权重法、并列选择法、共享函数法等遗传算法[9].如何运用遗传算法来解决太阳影子定位问题,是本文要解决的一个核心问题.在本文中,作者采用逆推的思想,结合太阳高度角、太阳赤纬角,建立了求太阳影子定位的多目标优化模型,并运用并行选择的遗传算法进行求解,实现了对测量地的精准定位.1太阳影子定位问题1.1 设计变量确定求解太阳影子定位问题的最终目的,是希望通过观察未知地点某一天内太阳影子的实际长度,从而确定该地的经、纬度,所以可以选取测量地的经、纬度作为设计变量.由于东西半球昼夜相反,而本文是以东半球为研究对象,所以设计变量的取值范围为:一 90 ^c p^ 90 (1)〇°<0<18〇°(2) 1.2 目标函数的确定实际影长已知,而通过给定经纬度的数值,可得到对应的理论影长,当理论影长接近或等于实际 影长时,此时的经纬度值即为测量地点.为此,以理 论影长和实际影长的接近程度作为优化的目标函 数.由于一天内的影长变化为一个向量,而比较向 量的接近程度可以从其方向(即变化规律)和数值大小两方面比较.衡量变化规律的相似性用相关系 数,相关系数越接近1,则说明两个向量的变化规 律越相似,衡量数值大小选用误差平方和,误差平 方和越小说明两个向量的偏离程度越小.经过上述 分析,建立以下两个目标函数:zi =min(l—R),R=R(S,S )(3)cp^dz2 = min V] (Sz—S z)2(4)i = i式(3)〜(4)中:只为理论影长与实际影长的 相关系数,S为一天中实际影长组成的向量,S'为理论影长.S;为一天中z时刻计算得到的影长,&为一天中z时刻对应的实际影长.1.3 约束条件1.3.1理论影长的计算假设某天某时刻太阳的位置如图1所示,立于 地面上的杆高为H,太阳光线通过杆顶P点,在地 面上形成一个影子点P',影子长度O P为S',太阳 光线与地面的夹角为a.则其满足的数学表达为S =且(5)tana1.3.2太阳高度角的计算太阳高度角是指某地太阳光线与该地作垂直 于地心的地表切线的夹角,它随地方时和太阳赤纬 角的变化而变化.其计算公式[1°]为:sin/? = sin^sina +cos<pcoS(jcost(6)式(6)中:/?为太阳高度角,为当地的纬度,a 为太阳赤纬角^为地方时角,其位置如图2所示.由于太阳光射到地球表面上时,会经过大气第1期于鹏等:基于并列选择遗传算法的太阳影子定位方法•195•层,使太阳光发生折射,折射后的太阳高度角a的计算公式为:■丌(7)由于影响大气层的折射率的因素[11]较多,为了方便计算,取空气折射率来近似代替,^ =1.000 273.1.3. 3地方时角的计算本文以东半球为研究对象,则对应的地方时角 的推导公式为:(12。
—们X A.X 15 °(8)式(8)中:了为北京时间j为当地经度.1.3.4太阳赤纬角的计算太阳赤纬角[12]是地球赤道平面与太阳和地球 中心的连线之间的夹角,赤纟韦角以一^年为周期,在 南北回归线的范围内移动,这成为季节的标志,其 近似的计算公式为:sin c7=0.397 95cos[〇. 985 63/CN—173)](9)式(9)中:N为日数,从1月1日算起,取值范围为 0<N<365.1.3. 5优化模型根据上述的目标函数和约束条件,建立太阳影子定位的优化模型为:zx =min(l—R),R=R(S,S )C fhdz2 =m i n(St—S t)2sin/?=sin^sina+coscpcosacost./ T C n\12-T-(120-…表X 15sinc7 = 0.397 95cos[〇.985 63/CN—173)]一 90 ^cp^ 900 ° 180 °2遗传算法求解太阳影子定位问题2. 1 并行选择的遗传算法并行选择[9]的基本思想是先将群体中的全部 个体按子目标函数的数目均等地划分为一些子群 体,对每个子群体分配一个子目标函数,各个子目 标函数在相应的子群体中独立地进行选择运算,各 自选择出适应度高的个体组成一个新的子群体,然 后再将所有这些新生成的子群体合并成一个完整的群体,在这个群体中进行交叉和变异运算,从而生成下一代的完整群体,如此不断地进行“分割-并列选择-合并”操作,最终可求出多目标优化问题的 Pareto最优解•图3为并列选择的遗传算法示意图.选择标准2.2 算法步骤(1)对设计变量经度、纬度,用格雷码进行编 码,根据每个变量的精度和变化范围确定其对应的编码个数为21.其对应的编码公式[9]为:2 7<C(bj—Uj)X10;i^2J —1(10)式(10)中:[A,~]为变量的取值范围,%为(2) 采用随机的方法产生个体数为100的初种群,且设置最大遗传代数为50,使用遗传代沟为 0. 9;(3) 将种群均匀地分为两部分,其中一部分群以A =min(l—幻为目标函数,另一部分种群(fhd的目标函数为A=r n in f;(& —S:)2,分别采用随f'9 i = \机遍历抽样的方法进行选择计算,选出各部分种群适应度高的个体组成新的子群体;适应度计算函数采用如下的线性函数[13]:P-1/(P)=2-sp +2X(sp -1)X ly(I D 式(11)中:凡为种群的大小,P为根据目标函数的大小所确定的个体在种群的位置,分为选择压力,一^般取1. 7.(4) 对上一步生成的种群,采用单点交叉[方式,如图4所示,生成新的种群,交叉概率取0.7;(5) 为了避免问题过早收敛,对新种群的个进行变异操作,变异概率取〇.01;(6) 由于遗传代沟的存在,为了保证每一代种群个数不变,对种群进行重插入.采用的策略为基于适应度插入方法,用子代代替适应度小的父 代.(7) 判断种群是否达到最大遗传代数,如果未sm71sm•196•f矣备科技大嗲#裉第35卷表1某地4月18日杆的影子坐标数据表北X M y/^S/m图4 单点交叉运算的示意图达到则转向步骤3,否则此时种群中适应度最大的 个体所对应的目标函数值,即为全局最优解.遗传算法的具体工作流程如图5所示.图5 遗传算法的流程图3实例运算与结果分析3.1 实例问题通过测量得到某地在4月18日中从14 : 42 到15 : 42的长度为2 m的直杆在水平地面上的太 阳影子顶点坐标数据如表1所示,其中直杆垂直于 地面,以杆的底端为坐标原点,水平面为平面.给出可能的地点.(以上数据来源于2015年全国大 学生数学建模大赛)14 :■42 1. 036 50.497 3 1. 149 614 :•45 1. 069 90. 502 9 1. 182 214 :t 481.103 80. 508 5 1. 215 314 *■511,13830. 514 2 1. 249 114 s'54 1. 173 20. 519 81.283 214 ^■57 1. 208 70. 525 5 1. 318 015 :【0Q1.244 80.531 1 1. 353 115 :■03 1. 281 50, 536 8 1. 389 415 ::06 1. 318 90. 542 6 1. 426 215 ::09 1. 356 80. 548 3 1. 463 415 ^:121.395 50. 554 1 1. 501 515 :■15 1. 434 90. 559 8 1. 540 215 :■18 1.475 10.563 71.579 915 :【21 1. 516 00.571 51.620 115 :>241.557 70* 577 4 1. 661 315 :■27 1. 600 30. 583 3 1. 703 315 :■30 1. 643 80.589 2 1. 746 215 ^■33 1. 688 20. 595 2L790 115 :>361.733 70. 601 3 1. 835 D15 :【39 1. 780 10.607 4 1. 880 915 s■421.827 7Q.613 51.927 9 3. 2 运算结果本问题在2015年全国大学生数学建模大赛中 采用了枚举法进行求解,在给定经纬度搜索的步长为1度的情形下,最终得到的最优解为:^= 1. 15 X 10—6,% =〇•100 5对应的经纬度为(l〇8°E,17°N),搜索用时4 min.运用上述的并列选择的遗传算法,并使用Mat lab编程,对模型进行求解,由于遗传算法在求解中具有随机性,我们多次运行程序,计算结果如表2所示.表2遗传算法求解结果汇总表次数纬度/(°)经度/(〇)釔1之2118. 76109. 022, 61X10—8 4. 41X10-4217. 13109.05 2. 23X10—8 4. 4X10—3316. 67108.97 2. 13X10—39. 4X10 (3)418. 1710B.63 1. 94X10—« 1.75X10"517. 17109.26 2. 25X10-83, 07X10 —4616, 32105.13 3. 18X10-19‘ 71X10-1717. 41109.24 2. 15X10-8 2. 04X10 —4820.10108.343‘14X10-8 3. 47X10-4917.40108.832, 58X10 —& 1.22X10-10:18, 99108.80 2.62X10s1. 1X10'对计算结果进行分析,最终得到最优解^ =2. 61 X10—8,% =4. 41 X10—4对应的经纬度为(109. 02 °E,18. 76 °N)遗传算法收敛的时间为8 s.3.3 结果分析比较2015年全国大学生数学建模大赛所给的第1期于鹏等:基于并列选择遗传算法的太阳影子定位方法•197 •准确地点(1〇9_5 °E,18.3 °N),本文给出的结果是 比较理想的.当然本文所给结果仍有一定误差,这 主要是由折射率数值的选取和搜索误差造成的.不 过就求解的过程而言,本文所用的方法与枚举算法 相比,求解结果的精度更高,收敛的时间更短.4结论本文针对太阳影子定位问题,建立了多目标优 化模型,并运用并行选择的遗传算法进行求解,最 终通过实例分析,指出应用并行选择遗传算法进行 太阳影子定位问题的求解,不仅收敛速度快,而且 能够避免陷人局部最优化,因此该方法是一种值得 推广的好方法.参考文献[1]郑鹏飞,林大均,刘小羊,等.基于影子轨迹线反求采光效果的技术研究[J].华东理工大学学报(自然科学版),2010,36(3):458-463.[2]张文华,司德亮,徐淑通,等.太阳影子倍率的计算方法及其对光伏阵列布局的影响[J].太阳能,2011(9): 28-31.[3]T a n g K e z o n g»S u n T in g k a i»Y a n g J in g y u. A n im p r o v e d gen e tic a lg o r it h m based o n a n o v e l s e le c tio n s tra te g y fo rn o n lin e a r p r o g r a m-m in g p ro b le m s[J].C o m p u te rs and(上接第192页)[4]李德懿,李宗林.可控模拟口腔环境的改良M l>300恒化器的建立及应用[J].临床口腔医学杂志,2002, 18 (4):243-245.[5]阮士贵.恒化器模型的动力学[J].华中师范大学学报(自然科学版),1997,31 (4): 377-397.[6]孙树林,张瑞娟.具有时滞和脉冲输人的一类双资源和两种微生物恒化器模型的分析[J].系统科学与数学,2012,32(1):111-120.[7]Z h a n g Y J»X iu Z L» C h e n L S. C h a o s in a fo o d c h a in c h e m-o s ta t w i t h p u ls e d in p u t a n d w a s h o u t[J].C h a o s»S o lito n s&- F r a c ta ls«2005,26(1): 159-166.[8]X ia I I X^W o lk o w ic z G S K,W a n g L. T r a n s ie n t o s c illatio n s in d u c e d b y d e la y e d g r o w t h re s p o n s e in th e c h e m o-s t a t[J].J o u r n a l o f M a th e m a tic a l B io lo g y»2005 »50 ( 5 ):489-530.[9]M e n g X Z»Z h a o Q L»C h e n L S. G lo b a l q u a lita tiv e a n a ly s iso f n e w m o n o d ty p e c h e m o s ta t m o d e l w i t h d e la y e d respon se a n d in p u t in p o llu te d e n v iro n m e n t [J ].A p p lie dM a th e m a tic s a n d M e c h a n ic s»2008»29( 1) :75-87.C h e m ic a l E n g in e e r in g»2011»35(4):615-621.[4]刘淳安,王宇平.基于新模型的多目标遗传算法[;!].西安电子科技大学学报(自然科学版),2005,32(2):260-267. [5]于志刚,宋申民,段广仁.遗传算法的机理与收敛性研究[J].控制与决策,2005,20(9): 971-980.[6]D in g W a n fu»G u o R u ife n g»Q in C h e n g g a n g»e t al. A f a u lt-t o le r a n t s c h e d u lin g a lg o r it h m w i t h s o ftw a r e f a u lt t o le rance in h a rd r e a l-tim e s y s te m s [J]. J o u r n a l o f C o m p u te rR e s e a rc h a n d D e v e lo p m e n t,2011,48(4): 691-698.[7]马永杰,云文霞.遗传算法研究进展[J].计算机应用研究,2012,29(4):!201-1206.[8]林基明,班文娇,王俊义,等.基于并行遗传-最大最小蚁群算法的分布式数据库查询优化[J].计算机应用,2016,36(3):675-680.[9]雷英杰,张善文,李续武,等.M A T L A B遗传算法工具箱及其应用[M].西安:西安电子科技大学出版社,2005. [10]王昌名.可照时数和太阳髙度角计算公式的简化证明[J].山东气象,1989(2):46-48.[11]金群锋.大气折射率影响因素的研究[D].杭州:浙江大学,2006:4-5.[12]陈晓勇,郑科科.对建筑日照计算中太阳赤纬角公式的探讨[J].浙江建筑,2011,28(9):6-8.[13]梁昔明,朱灿,颜东煌.基于物种选择的遗传算法求解约束非线性规划问题[J].中南大学学报(自然科学版),2009,40(1):185-189.【责任编辑:蒋亚儒】[10]魏春金,陈兰荪.具时滞增长反应及脉冲输人M o n o d-I l a k l d a n e恒化器模型的分析[J].南京师范大学学报,2008,31(3):6-11.[11]W a n g F Y,P a n g G P,L u Z Y. A n a ly s is o f a B e d d in g to n-D e A n g e lis fo o d c h a in c h e m o s ta t w i t h p e r io d ic a lly v a r y in gd ilu t io n r a t e[J].C h a o s»S o litio n s a n d F r a c t a ls» 2009 » 40(2):1 609-1 615.[12]M ile d E I I, A la in R. P r a c tic a l c o e x is te n c e o f tw o speciesin th e c h e m o s ta t A s lo w-fa s t c h a r a c te r iz a tio n[J]. M a th em a tic a l B io s c ie n c e,2009,218(1):33-39.[13]L a k s h m ik a n th a m V»B a in o v D D»S im e o n o v P S. T h e o r yo f im p u ls iv e d iff e r e n tia l e q u a t io n s[M].S in g a p o re: W o r ldS c ie n tific, 1989.[14]陈兰荪,陈健.非线性生物动力系统[M].北京:科学出版社,1993.[15]K u a n g Y. D e la y d iffe r e n tia l e q u a tio n s w i t h a p p lic a tio nd y n a m ic s[M].C a lif o r n ia: A c a de m ic P re s s I n c, 1993.【责任编辑:陈佳】。