矢量控制原理.ppt
1矢量控制基本原理
1矢量控制基本原理
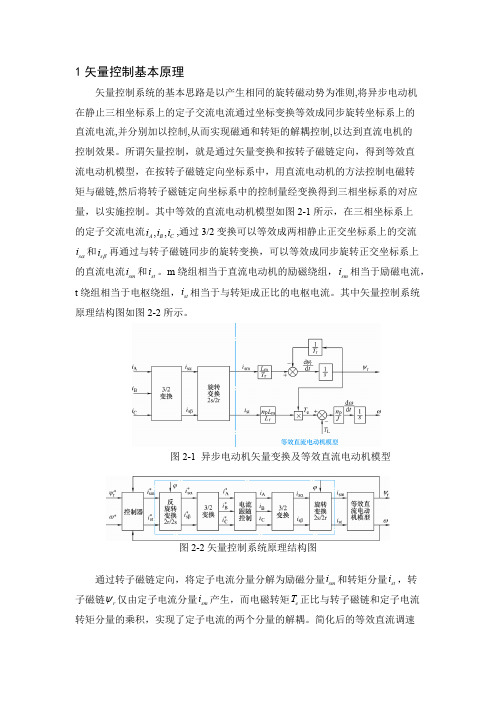
矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
其中等效的直流电动机模型如图2-1所示,在三相坐标系上的定子交流电流,通过3/2变换可以等效成两相静止正交坐标系上的交流,,A B C i i i 和再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上s i αs i β的直流电流和。
m 绕组相当于直流电动机的励磁绕组,相当于励磁电流,sm i st i sm i t 绕组相当于电枢绕组,相当于与转矩成正比的电枢电流。
其中矢量控制系统st i 原理结构图如图2-2所示。
图2-1 异步电动机矢量变换及等效直流电动机模型
图2-2矢量控制系统原理结构图
通过转子磁链定向,将定子电流分量分解为励磁分量和转矩分量,转sm i st i 子磁链仅由定子电流分量产生,而电磁转矩正比与转子磁链和定子电流r ψsm i e T 转矩分量的乘积,实现了定子电流的两个分量的解耦。
简化后的等效直流调速
系统如图2-3所示。
图4-2 带转矩内环和磁链闭环矢量控制系统的电气原理图
MATLAB 系统仿真系统设计
powergui A B
C +-
A
B C。
svpwm空间矢量控制原理课件

SVPWM 空间矢量控制原理课件
简介
什么是 SVPWM?SVPWM 空间矢量控制是一种高级的电力电子调制技术,被 广泛应用于三相无刷直流电机控制中。SVPWM 在控制电机运行速度、转矩和 效率等方面具有显著优势。
SVPWM 的原理主要基于三相电流和电压之间的矢量关系,通过调节矢量的方 向和大小,实现对电机的精确控制。
通过对实验结果的分析,可以评估 SVPWM 技术在不同应用场景下的性能,为 后续的优化和改进提供指导。
结语
SVPWM 技术在电机控制领域具有广阔的应用前景,未来的发展趋势包括更高的控制精度和效率、 更大的适应性和更广泛的应用范围。
学习 SVPWM 的建议包括深入理解空间矢量的概念和原理,掌握计算公式和算法,以及进行实际 的仿真和实验。
SVPWM 控制系统
SVPWM 控制系统框图包括控制器和执行器,其中控制器负责计算占空比,执 行器负责将计算后的占空比转换为电压输出。
控制器的设计涉及到稳定性分析,需要考虑信号延迟、噪声等因素,以确保 系统的可靠性和稳定性。
SVPWM 实验
SVPWM 的实验原理是在实际电机控制系统中,通过控制电流矢量的方向和大 小,控制电机的运行。实验步骤和材料准备需要根据具体实验要求进行调整。
SVPWM 实现
SVPWM 的实现主要基于以下基本公式:U = Udc * (ma * Va + mb * Vb + mc * Vc) / sqrt(3) 这个公式描述了电机电压的计算方式,其中 U 是输出的电压,Udc 是直流电压,ma、mb 和 mc 是 空间矢量区域内的占空比,Va、Vb 和 Vc 是三个空间矢量。 通过计算这些参数,可以确定电机所需的占空比,进而实现精确控制。
矢量控制(FOC)基本原理
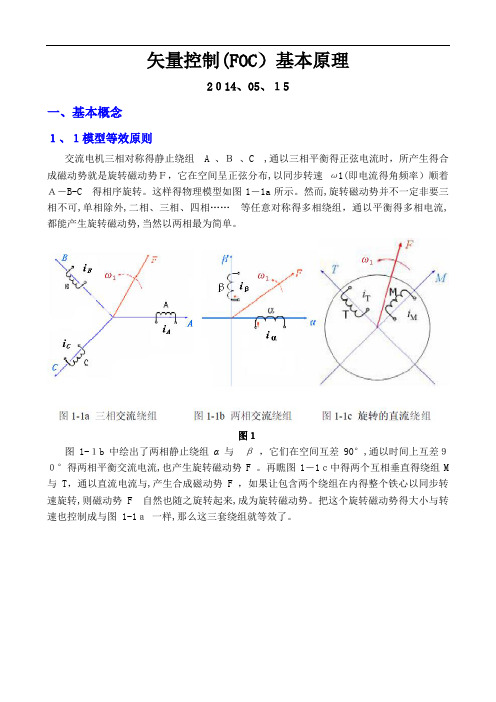
矢量控制(FOC)基本原理2014、05、15一、基本概念1、1模型等效原则交流电机三相对称得静止绕组 A 、B、C ,通以三相平衡得正弦电流时,所产生得合成磁动势就是旋转磁动势F,它在空间呈正弦分布,以同步转速ω1(即电流得角频率)顺着A-B-C 得相序旋转。
这样得物理模型如图1-1a所示。
然而,旋转磁动势并不一定非要三相不可,单相除外,二相、三相、四相……等任意对称得多相绕组,通以平衡得多相电流,都能产生旋转磁动势,当然以两相最为简单。
图1图1-1b中绘出了两相静止绕组α与β,它们在空间互差90°,通以时间上互差90°得两相平衡交流电流,也产生旋转磁动势F 。
再瞧图1-1c中得两个互相垂直得绕组M 与 T,通以直流电流与,产生合成磁动势 F ,如果让包含两个绕组在内得整个铁心以同步转速旋转,则磁动势 F 自然也随之旋转起来,成为旋转磁动势。
把这个旋转磁动势得大小与转速也控制成与图 1-1a一样,那么这三套绕组就等效了。
三相--两相变换(3S/2S变换)在三相静止绕组A、B、C 与两相静止绕组α、β之间得变换,简称3S/2S 变换。
其电流关系为两相—两相旋转变换(2S/2R变换)同步旋转坐标系中(M、T坐标系中)轴向电流分量与α、β坐标系中轴向电流分量得转换关系为1、2矢量控制简介矢量控制就是指“定子三相电流矢量控制”。
矢量控制理论最早为解决三相异步电机得调速问题而提出。
交流矢量得直流标量化可以使三相异步电机获得与直流电机一样优越得调速性能。
将交流矢量变换为两相直流标量得过程见图2。
图2图2得上图为静止坐标系下得定子三相交流矢量图2得中图为静止坐标系下得等效两相交流矢量图2得下图为旋转坐标系下得等效两相直流标量,就是转矩电流,就是励磁电流。
经图2得变换后,定子三相交流矢量变为了旋转得两相直流标量。
进而可以把异步电机瞧作直流电机,分别控制励磁电流与转矩电流。
变换公式即式(1)与式(2)。
电动汽车异步电机矢量控制原理75页PPT

谢谢!
电动汽车异步电机矢量控制原理
21、静念园林好,人间良可辞。 22、步步寻往迹,有处特依依。 23、望云惭高鸟,临木愧游鱼。 24、结庐在人境,而无车马喧;问君 何能尔 ?心远 地自偏 。 25、人生归有道,衣食固其端。
61、奢侈是舒适的,否则就不是奢侈 。——CocoCha nel 62、少而好学,如日出之阳;壮而好学 ,如日 中之光 ;志而 好学, 如炳烛 之光。 ——刘 向 63、三军可夺帅也,匹夫不可夺志也。 ——孔 丘 64、人生就是学校。在那里,与其说好 的教师 是幸福 ,不如 说好的 教师是 不幸。 ——海 贝尔 65、接受挑战,就可以享受胜利的喜悦 。——杰纳勒 尔·乔治·S·巴顿
矢量控制(FOC)基本原理

矢量控制(FOC)基本原理一、基本概念1.1模型等效原则交流电机三相对称的静止绕组 A 、B 、C ,通以三相平衡的正弦电流时,所产生的合成磁动势是旋转磁动势F ,它在空间呈正弦分布,以同步转速ω1(即电流的角频率)顺着 A-B-C 的相序旋转。
这样的物理模型如图1-1a 所示。
然而,旋转磁动势并不一定非要三相不可,单相除外,二相、三相、四相…… 等任意对称的多相绕组,通以平衡的多相电流,都能产生旋转磁动势,当然以两相最为简单。
图1图1-1b 中绘出了两相静止绕组α 和 β ,它们在空间互差90°,通以时间上互差90°的两相平衡交流电流,也产生旋转磁动势F 。
再看图1-1c 中的两个互相垂直的绕组M 和 T ,通以直流电流M i 和T i ,产生合成磁动势F ,如果让包含两个绕组在内的整个铁心以同步转速旋转,则磁动势F 自然也随之旋转起来,成为旋转磁动势。
把这个旋转磁动势的大小和转速也控制成与图 1-1a 一样,那么这三套绕组就等效了。
三相--两相变换(3S/2S 变换)在三相静止绕组A 、B 、C 和两相静止绕组α、β之间的变换,简称3S/2S 变换。
其电流关系为111221022A B C i i i i i αβ⎡⎤⎡⎤--⎢⎥⎡⎤⎢⎥⎢=⎢⎥⎢⎥⎢⎣⎦⎢⎥-⎣⎦⎢⎦⎣() 两相—两相旋转变换(2S/2R 变换) 同步旋转坐标系中(M 、T 坐标系中)轴向电流分量与α、β坐标系中轴向电流分量的转换关系为cos sin 2sin cos M T i i i i αβϕϕϕϕ⎡⎤⎡⎡⎤⎤=⎢⎥⎢⎢⎥⎥-⎦⎣⎦⎣⎣⎦ ()1.2矢量控制简介矢量控制是指“定子三相电流矢量控制”。
矢量控制理论最早为解决三相异步电机的调速问题而提出。
交流矢量的直流标量化可以使三相异步电机获得和直流电机一样优越的调速性能。
将交流矢量变换为两相直流标量的过程见图2。
图2图2的上图为静止坐标系下的定子三相交流矢量图2的中图为静止坐标系下的等效两相交流矢量图2的下图为旋转坐标系下的等效两相直流标量,T i 是转矩电流,M i 是励磁电流。
《矢量控制原理》
《矢量控制原理》矢量控制原理是一种电力电子技术,它使用矢量变换方法来实现对电机转子磁通和转子电流的精确控制。
这种控制方法可以提高电机的运行效率和精确度,使其在各种负载条件下都能稳定运行。
矢量控制原理主要是基于电磁学和电机理论,通过电流和磁场的控制来控制电机的转矩和速度。
其基本原理是通过控制电机定子上的电流分量和频率,产生一个旋转磁场,进而引起电机转子上的电流和磁场,从而形成一个旋转磁力矢量。
这种旋转磁力矢量可以根据实际需求,控制电机的速度、转矩和方向。
矢量控制原理的核心是矢量变换方法。
矢量变换是一种将三相电流或电压转换为以一个旋转矢量表示的方法。
在矢量变换中,三相正弦波电流或电压通过矢量变换公式,转换成旋转矢量的幅值和相位。
这种转换方式可以将三相电流或电压分解成它们的正弦波分量和余弦波分量,从而方便进行数学计算和控制。
在电机控制中,矢量控制原理主要应用在两种形式的控制中:转矩控制和转速控制。
转矩控制是指通过控制电机的定子电流或转子电流,来实现对电机输出转矩的精确控制。
转速控制是指通过控制电机的转子磁通和转子电流,来实现对电机转速的精确控制。
这两种控制方式在实际应用中经常结合使用,以实现对电机的全面控制。
矢量控制原理具有许多优点。
首先,它可以实现对电机的精确控制,使电机在不同负载条件下都能保持稳定的运行。
其次,它能够提高电机的运行效率,减少能量损失。
此外,矢量控制原理还能够实现对电机的快速响应和高动态性能,适应各种控制要求。
然而,矢量控制原理也存在一些局限性。
首先,它在控制电机过程中需要对电机的参数进行准确的测量和估计,才能实现准确的控制。
其次,矢量控制原理通常使用复杂的计算方法和算法,需要较高的计算能力和控制器硬件。
此外,矢量控制原理的实施和调试也需要一定的技术经验和专业知识。
总的来说,矢量控制原理是一种先进的电力电子控制技术,对电机的控制精度和效率有很大的提升。
随着电力电子技术和控制算法的进一步发展,矢量控制原理在电机控制领域的应用前景将更加广阔。
矢量控制系统(FOC)基本原理
矢量控制系统(FOC)基本原理
矢量控制(FOC)基本原理
2022.05.15
duquqiubai1234163.
一、基本概念
1.1模型等效原则
交流电机三相对称的静止绕组A 、B 、C ,通以三相平衡的正弦电流时,所产生的合成磁动势是旋转磁动势 F ,它在空间呈正弦分布,以同步转速ω1(即电流的角频率)顺着A-B-C 的相序旋转。
这样的物理模型如图1-1a 所示。
然而,旋转磁动势并不一定非要三相不可,单相除外,二相、三相、四相…… 等任意对称的多相绕组,通以平衡的多相电流,都能产生旋转磁动势,当然以两相最为简单。
图1
图1-1b 中绘出了两相静止绕组α 和β ,它们在空间互差90°,通以时间上互差90°的两相平衡交流电流,也产生旋转磁动势F 。
再看图1-1c 中的两个互相垂直的绕组M 和T ,通以直流电流M i 和T i ,产生合成磁动势 F ,如果让包含两个绕组在的整个铁心以同步转速旋转,则磁动势 F 自然也随之旋转起来,成为旋转磁动势。
把这个
旋转磁动势的大小和转速也控制成与图1-1a 一样,那么这三套绕组就等效了。
《矢量控制系统》课件

驱动器
驱动器是矢量控制系统中的功率 转换单元,负责将电能传递给电
机。
驱动器采用电力电子器件,如绝 缘栅双极晶体管(IGBT)或硅整 流二极管(SCR),以实现高效
率和高功率密度的能量转换。
驱动器还配备有过电流、过电压 、过热等保护功能,以确保系统
的安全运行。
03
矢量控制系统的性能分析
动态性能分析
人工智能技术还可以用于故障诊断和预测,通过分析历史数 据和实时监测数据,提前发现潜在的故障,并采取相应的预 防措施,确保系统的可靠性和安全性。
分布式矢量控制系统
随着工业自动化的发展,分布式矢量控制系统逐渐成为趋 势。这种系统将多个矢量控制器通过网络连接起来,实现 信息共享和协同控制,提高了整个系统的灵活性和可扩展 性。
在交通领域,矢量控 制系统用于控制电动 车、地铁等轨道交通 工具的牵引系统,提 高车辆的运行效率和 安全性。
在新能源领域,பைடு நூலகம்量 控制系统用于控制风 力发电机、太阳能逆 变器等设备的能源转 换和并网控制,提高 新能源发电的效率和 可靠性。
02
矢量控制系统的组成
控制器
控制器是矢量控制系统的核心,负责 接收指令并计算电机的控制信号。
、降低能耗。
案例三:矢量控制系统在机器人中的应用
总结词
机器人需要高精度、快速响应的运动控 制,矢量控制系统能够满足这些要求, 提高机器人的作业效率和安全性。
VS
详细描述
矢量控制系统在机器人领域的应用广泛, 如工业机器人、服务机器人等。通过矢量 控制技术,机器人能够实现精确的位置、 速度和加速度控制,快速响应各种指令和 环境变化。这有助于提高机器人的作业效 率、增强安全性,并降低能耗,为机器人 技术的发展和应用提供了重要支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
q
电枢绕组
A
ia
励磁绕组
F d
if
ic C
补偿绕组 图6-46 二极直流电机的物理模型 4
(1)交流电机绕组的等效物理模型
B
F
iB
ω1
B
A
iA A
iC
C
C
a)三相交流绕组
5
(2)等效的两相交流电机绕组
ω1 i
i
F
b)两相交流绕组
6
旋转的直流绕组与等效直流电机模型
F
1
T M
it M
T
im
c)旋转的直流绕组
是短路的,则 urd = urq = 0 ,于是,电压方 程可写成
usd Rsisd psd 1sq usq Rsisq psq 1sd 0 Rrird prd (1 )rq 0 Rrirq prq (1 )rd
(6-112)
27
由式(6-103b)中第3,4两式可解出
ird
2 1
2
0 2
iA
iB
(6-94)
14
2
iA iB
3 1
6
0 i
1
iβα
2
(6-95)
按照所采用的条件,电流变换阵也就是 电压变换阵,同时还可证明,它们也是磁 链的变换阵。
15
两相—两相旋转变换(2s/2r变换)
从上图等效的交流电机绕组和直流电机绕 组物理模型的图 b 和图 c 中从两相静止坐标 系到两相旋转坐标系 M、T 变换称作两相— 两相旋转变换,简称 2s/2r 变换,其中 s 表示 静止,r 表示旋转。
24
三相异步电动机在两相坐标系上的 状态方程
1. —r — is 状态方程
由前节式(6-103b)表示dq坐标系上的磁 链方程
sd L s isd L m ird sq L s isq L m irq rd L m isd L r ird rq L m isq L r irq
式中
c os sin C2r/2s sin c os
(6-97)
是两相旋转坐标系变换到两相静止坐标系 的变换阵。
19
对式(6-96)两边都左乘以变换阵的逆 矩阵,即得
iim t c s io n c s s o i n 1 s iiβ α c s o inc s io n iiβ α s
7
• 三相和两相坐标系与绕组磁动势的空间矢量
B
N3iB
60o 60o
N2i
N3iA A
N2iβ
N3iC C
8
设磁动势波形是正弦分布的,当三相总磁 动势与二相总磁动势相等时,两套绕组瞬时
磁动势在 、 轴上的投影都应相等,
N 2 i α N 3 i A N 3 i B c6 o N 0 3 i C s c6 o N 0 3 ( s i A 1 2 i B 1 2 i C ) N 2 iβ N 3 iB s6 in 0 N 3 iC s6 in 0 2 3N 3 (iB iC )
9
写成矩阵形式,得
i iβα
N3 N2
1 0
1 2 3
2
1223iiiACB
(6-89)
10
考虑变换前后总功率不变,在此前提下, 可以证明,匝数比应为
N3 2 N2 3
(6-90)
11
代入式(6-89),得
i
iβα
21 30
1 2 3
2
1223iiiACB
(6-91)
ቤተ መጻሕፍቲ ባይዱ12
三相—两相坐标系的变换矩阵
(6-98)
20
两相静止—两相旋转坐标系的变换矩阵
则两相静止坐标系变换到两相旋转坐标系的 变换阵是
cos sin
C2s/2r sin c os
(6-99)
电压和磁链的旋转变换阵也与电流(磁动势) 旋转变换阵相同。
21
直角坐标/极坐标变换(K/P变换)
令矢量 is 和M
轴的夹角为 s , T
已知 im、it ,求
1
is (Fs)
is 和 s ,就是直
角坐标/极坐标变
it
s
im
M
换,简称K/P变换。
22
显然,其变换式应为
is im2 it2
s
arctan it im
(6-100) (6-101)
23
三相异步电动机在两相坐标系上的 状态方程
作为异步电机控制系统研究和分析基础 的数学模型,过去经常使用矩阵方程,近 来越来越多地采用状态方程的形式,因此 有必要再介绍一下状态方程。为了简单起 见,这里只讨论两相同步旋转dq坐标系上 的状态方程,如果需要其它类型的两相坐 标,只须稍加变换,就可以得到。
令 C3/2 表示从三相坐标系变换到两相坐标系的 变换矩阵,则
C3/ 2
2 1
3 0
1 2 3
2
1 23 2
(6-92)
13
如果三相绕组是Y形联结不带零线, 则有 iA + iB + iC = 0,或 iC = iA iB 。 代入式(6-92)和(6-93)并整理后得
3
i
α
iβ
(6-103b)
25
式(6-104)为任意旋转坐标系上的电 压方程
usd Rsisd p sd dqs sq usq Rsisq p sq dqs sd urd Rrird p rd dqr rq urq Rrirq p rq dqr rd
(6-104)
26
对于同步旋转坐标系, dqs = 1 , dqr = 1 - = s ,又考虑到笼型转子内部
1 Lr
rd
L m isd
irq
1 Lr
rq
L m isq
28
基于动态模型按转子磁链定向的 矢量控制系统
• 矢量控制系统的基本思路 • 按转子磁链定向的矢量控制方程及其解耦
控制目标
• 最大利用风能 • 与电网的匹配(有功、无功、功率因
数) • 最好的电性能(动、静态、稳定性、
谐波)
1
三相异步电动机的物理模型
B uB
b
ub
uc
uC
1
a
ua uA A
C
c
三相异步电动机的物理模型
2
坐标变换的基本思路
从上节分析异步电机数学模型的过程中 可以看出,这个数学模型之所以复杂,关 键是因为有一个复杂的 66 电感矩阵,它 体现了影响磁链和受磁链影响的复杂关系。 因此,要简化数学模型,须从简化磁链关 系入手。
把两个坐标系画在一起,即得下图。
16
两相—两相旋转变换(2s/2r变换)
T
1
iβ
Fs
it
itcos M im
imsin
i it sin
imcos
17
2s/2r变换公式
iαimco sits in
iβims initcos
18
两相旋转—两相静止坐标系的变换矩阵
写成矩阵形式,得
iiβ α c s i o ns cso in s iim t C 2r/2s iim t (6-96)