基于Pro/E的2K—H型周转轮系机构的建模与运动仿真
2K-H差动轮系动力学建模与仿真分析

振动,取逆时针方向为正。 差动轮系传动的纯扭振动力学模型如图 2 所示 (图中未绘出阻尼符号 ):
ψ n —第 n 个行星轮与水平方向的夹角;
图1 2K-H 型差动轮系结构简图
1
动力学模型
差动轮系动力学模型用到如下几个假设 [4]: ( 1 )将系统视为集中参数系统; ( 2 )各行星轮质量、转动惯量相同; ( 3 )忽略齿侧间隙的影响; ( 4) 仅考虑三个中心构件和各个行星轮的扭转
ui —各个旋转件的扭转位移,ui = riθi , 式中 ri ,
图2
2K-H 差动轮系纯扭振动力学模型
图中:
k ju —第 j 个构件的回转支承刚度( j = c, r , s
分别代表行星架、齿圈、太阳轮)
krn — 第 n 个 行 星 轮 与 内 齿 圈 的 时 变 啮 合 刚 度
( n = 1, 2,..., N ,下同)
k sn —第 n 个行星轮与太阳轮的时变啮合刚度;
[6 , 7] [5]
,并根据齿轮转动惯量、扭转角位移、
啮合阻尼计算啮合力大小,如图 3 所示。 图4
2
2K-H差动轮系虚拟样机模型
3、仿真分析
太阳轮驱动转速 700r/min,齿圈驱动转速为 1200r/min , 行星架负载为 800Nm, 仿真步长为 1e-5s, 仿真时间 1s。 各主要部件角速度如图 5所示, 由于啮合刚度的 变化,即使输入转速为恒定值,输出转速仍有波动。 输出转速均值为 1046r/min ,幅值为 23.1r/min 。输出 转速均值与理论计算值( 1047.22r/min )误差为 0.11%,可认为样机建立是正确的。
基于PRO_E的凸轮机构结构设计及其运动仿真分析_毕业设计正文
湖北文理学院毕业设计(论文)正文题目基于PRO/E的凸轮机构结构设计及其运动仿真分析专业机械设计制造及其自动化班级姓名学号指导教师职称┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊基于Pro/E的凸轮机构的结构设计及其运动仿真分析摘要:凸轮机构是机械中一种常用的机构,它结构简单,紧凑,工作可靠,设计方便,利用不同的凸轮轮廓线可以使从动件实现任意给定的复杂运动规律。
同时它兼有传动,导向和控制机构的各种功能和优点。
因此在包装机,纺织机,印刷机,内燃机以及农业机具等具有广泛的运用。
传统的凸轮设计有图解法和解析法,图解法形象直观,结构简单,但是手工作图选取的等分数有限,误差较大,较繁琐。
解析法设计虽然解决了凸轮设计的精度问题,但是要得到完整的凸轮轮廓线需要建立复杂的数学公式,编制复杂的程序,编程和计算工作量大。
总之,传统的运动分析法是一种间断的,静态的分析方法。
本文利用Pro/E强大的三维实体建模功能,建立凸轮机构的装配模型,然后进行运动学分析,仿真凸轮机构的运动情况,最后将所设置的构件的位移,速度,加速度变化情况以表格形式输出,通过修改仿真模型的参数,快速的修改和优化设计方案。
关键词:凸轮机构;Pro/E;三维建模;运动仿真。
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊The cam mechanism based on Pro/E structure design andkinematics simulation analysisAbstract:the cam mechanism is a kind of commonly used mechanical mechanism, it has the advantages of simple structure, compact structure, reliable work, convenient design, using different cam contour line allows the follower to realize any given motion law of complex. At the same time it has the drive, guide and control mechanism of the various features and advantages. So in the packaging machine, textile machine, printing machine, internal combustion engines and agricultural machinery is widely used. The traditional cam design graphic method and analytic method, graphical method is visual, simple structure, but the chart manually selected score is limited, the error is large, complex. Analytic design method solves the problem of precision cam design, but to get the full cam contour line need to build a complex mathematical formula, the preparation of complex procedures, programming and calculation. In short, the traditional motion analysis is a kind of discontinuous, static analysis method. In this paper, using Pro/E powerful3D entity modeling function, establish the cam assembly model, then analyses the kinematics simulation of cam mechanism, motion, the setting member of displacement, velocity, acceleration in form of output, by modifying the parameters of the simulation model, rapid modification and optimization design.Key words: cam mechanism; Pro/E;3D modeling; motion simulation.┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊目录1前言 (1)1.1本课题研究的目的和意义 (1)1.2国内外的研究现状及发展趋势 (2)1.3研究的主要内容、途径和技术线路 (3)2凸轮轮廓线的设计 (4)2.1凸轮机构的分类 (4)2.2从动件的运动规律及选取原则 (4)2.3凸轮轮廓线的设计 (5)2.3.1凸轮轮廓线设计方法的基本原理 (5)2.3.2凸轮轮廓曲线的计算 (5)2.4凸轮机构基本尺寸的确定 (7)2.5滚子半径的选择 (8)3凸轮机构的实体建模与装配 (10)3.1Pro/E软件简介.............................. 错误!未定义书签。
2K—H(A)型行星轮系“模型化”分析
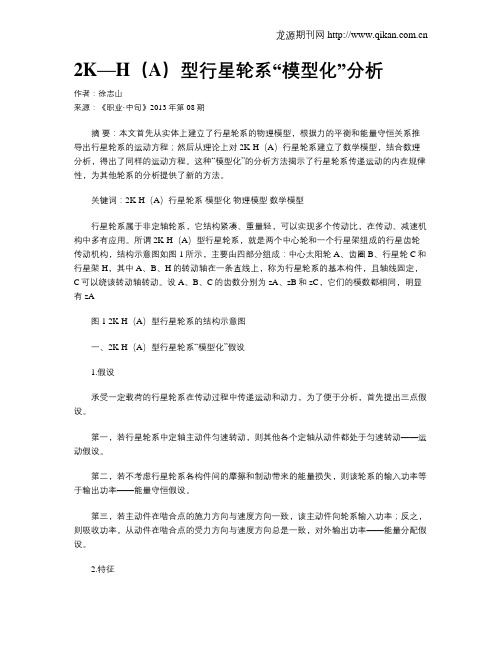
2K—H(A)型行星轮系“模型化”分析作者:徐志山来源:《职业·中旬》2013年第08期摘要:本文首先从实体上建立了行星轮系的物理模型,根据力的平衡和能量守恒关系推导出行星轮系的运动方程;然后从理论上对2K-H(A)行星轮系建立了数学模型,结合数理分析,得出了同样的运动方程。
这种“模型化”的分析方法揭示了行星轮系传递运动的内在规律性,为其他轮系的分析提供了新的方法。
关键词:2K-H(A)行星轮系模型化物理模型数学模型行星轮系属于非定轴轮系,它结构紧凑、重量轻,可以实现多个传动比,在传动、减速机构中多有应用。
所谓2K-H(A)型行星轮系,就是两个中心轮和一个行星架组成的行星齿轮传动机构,结构示意图如图1所示,主要由四部分组成:中心太阳轮A、齿圈B、行星轮C和行星架H,其中A、B、H的转动轴在一条直线上,称为行星轮系的基本构件,且轴线固定,C可以绕该转动轴转动。
设A、B、C的齿数分别为zA、zB和zC,它们的模数都相同,明显有zA图1 2K-H(A)型行星轮系的结构示意图一、2K-H(A)型行星轮系“模型化”假设1.假设承受一定载荷的行星轮系在传动过程中传递运动和动力,为了便于分析,首先提出三点假设。
第一,若行星轮系中定轴主动件匀速转动,则其他各个定轴从动件都处于匀速转动——运动假设。
第二,若不考虑行星轮系各构件间的摩擦和制动带来的能量损失,则该轮系的输入功率等于输出功率——能量守恒假设。
第三,若主动件在啮合点的施力方向与速度方向一致,该主动件向轮系输入功率;反之,则吸收功率。
从动件在啮合点的受力方向与速度方向总是一致,对外输出功率——能量分配假设。
2.特征根据“模型化”假设,2K-H(A)型行星轮系具有如下特征。
第一,若行星轮系某一构件匀速转动,则其他各构件均处于转动平衡。
第二,行星轮系彼此相接触的构件间存在作用力和反作用力关系,且作用点在啮合点或转动中心上。
第三,若行星轮系某一构件在啮合点和转动中心上存在作用力,则它们在同一平面内,且彼此相互平行,并对该构件在这一平面内任意一点力矩的代数和为零。
2K-H行星齿轮传动优化设计数学 建模与解算
2K-H行星齿轮传动优化设计数学建模与解算【摘要】本文针对2K-H行星齿轮传动进行优化设计,通过数学建模和解算方法,提出了一种有效的优化设计方案。
首先介绍了行星齿轮传动的基本原理,然后详细分析了2K-H行星齿轮传动的结构特点。
在数学建模方法部分,提出了如何利用数学模型来优化设计方案。
接着通过解算过程展示了优化设计的具体步骤。
在对设计优化结果进行评价,并总结了研究成果。
展望了未来研究方向,为行星齿轮传动的进一步优化提供了参考。
本研究对于提高行星齿轮传动的性能和效率具有重要意义,为相关领域的研究和发展提供了有益的启示。
【关键词】关键词:行星齿轮传动、2K-H行星齿轮传动、优化设计、数学建模、解算过程、设计评价、研究成果、未来展望。
1. 引言1.1 研究背景在实际应用中,2K-H行星齿轮传动的设计和优化仍然存在一些问题和挑战。
传统的设计方法往往过于依靠经验和试错,难以确保设计的最优性。
通过数学建模和优化设计,可以有效地提高2K-H行星齿轮传动的性能和效率。
本文旨在通过对2K-H行星齿轮传动的数学建模与解算进行深入研究,提出一种优化设计方案,并通过解算过程验证设计结果的有效性。
通过本研究,可以为2K-H行星齿轮传动的设计和应用提供理论基础和技术支撑。
部分将围绕行星齿轮传动的发展历程、2K-H行星齿轮传动的特点和存在的问题进行介绍和分析,为后续的研究工作奠定基础。
1.2 研究目的研究目的是通过对2K-H行星齿轮传动进行优化设计,提高其传动效率和工作性能。
具体目的包括:优化齿轮的结构参数,减小传动系统的摩擦损失和能量损失;提高传动系统的传动精度和稳定性,降低噪声和振动水平;提高传动系统的承载能力和寿命,增强其工作可靠性和耐久性。
通过数学建模和解算分析,寻找最佳的设计方案,使得2K-H行星齿轮传动在实际工程应用中能够发挥最佳效果,满足不同领域和行业的需求。
通过本研究的成果,为行星齿轮传动的设计优化提供新的思路和方法,推动行星齿轮传动技术的发展和应用,为相关领域的工程设计和制造提供技术支持和参考依据。
2K-H行星齿轮传动优化设计数学 建模与解算
2K-H行星齿轮传动优化设计数学建模与解算作者:史素华来源:《中阿科技论坛(中英阿文)》2019年第01期摘要:通过研究2K-H行星轮系的设计要求及分析各种约束条件,以最小体积为目标建立数学模型。
在确定设计变量,建立目标函数后,利用约束变尺度优化算法和Fortran语言编程进行最优化的求解。
关键词:行星齿轮传动;优化设计;m数学建模渐开线行星齿轮传动与普通定轴齿轮传动相比具有承载能力大、体积小、效率高、重量轻、传动比大、噪音小、可靠性高、寿命长、便于维修等优点,广泛应用于小汽车、重型载重汽车、工程车辆和飞机等的传动系中[1]。
研究指出,同一制造精度下,行星传动比起定轴线固定传动,载荷一般沿齿宽分布得较好[2]。
这是由于在行星传动中齿宽对直径的比值一般不超过0.7,而在普通减速器中却达到1.6,在个别情况下,例如在涡轮机减速器中则显著超过此值。
在同样条件下,行星传动的箱体重量比普通定轴齿轮传动的箱体其重量要小好几倍,因为行星传动箱体外廓尺寸比普通定轴齿轮传动的箱体要小得多。
设计行星传动时,正确选择齿轮参数的意义远比设计普通定轴传动的大。
齿轮参数选择不当时,不但可能丧失在外廓尺寸和重量方面的优点,甚至可能得到不利于使用的传动。
按最小体积为目标对行星齿轮机构进行最优化设计,不仅对缩小体积,而且对减小质量、节约材料及降低成本等都是很有实效的,这些对汽车及飞机这一类的产品尤其重要[3]。
现在就以这类产品中常采用的2K-H型行星齿轮机构作优化设计。
一、2K-H行星齿轮设计要求对于2K-H行星齿轮,如右图所示,要设计一个符合条件的行星齿轮传动,需要根据已知条件确定齿轮的几个参数:各齿轮的齿数z,模数m,齿宽b,如果将行星轮的个数也作为设计变量,则有四个参数。
根据机械设计知识,行星齿轮参数需要满足以下两种条件:一是几何设计条件就是在不考虑材料视齿轮为刚体的情况下齿轮正常传动的条件;二是齿轮的强度条件,行星齿轮作为一种机械构件,需要在确定材料的情况下对强度作一定的要求,保证齿轮到达预期寿命[4]。
基于proe的凸轮机构设计和仿真

目录中文摘要 (I)英文摘要 (II)第1章任务与课题条件 (1)1.1任务 (1)1.2课题条件 (1)第2章凸轮机构及PRO/E简介 (2)2.1凸轮机构简介 (2)2.2 PRO/E简介 (7)第3章盘形凸轮创建过程 (10)3.1新建零件 (10)3.2创建拉伸特征 (10)3.3创建方程曲线 (10)3.4创建图形特征 (11)3.5创建可变剖面扫描特征 (12)3.6创建孔特征 (12)第4章其余零件设计 (14)4.1从动杆设计 (14)4.2连杆设计 (14)4.3滑块设计 (15)第5章装配 (16)第6章机构仿真 (17)6.1定义凸轮从动连接机构. (17)6.2添加驱动器 (17)第7章运动分析及结果分析 (20)7.1运行分析 (20)7.2结果回放 (21)7.3结果分析 (22)结论 (25)参考文献 (26)致谢 (27)摘要机械产品的运动分析和仿真在机械产品的设计中是不可缺少的重要环节。
在各类机械的传动结构中,凸轮结构有着广泛的应用,根据凸轮机构的设计原理,提出了在pro/e 中实现凸轮设计及实体造型的方法,并主要利用Pro/e Wildfire的运动学分析模块Mechanism对凸轮机构进行了运动学分析和仿真,这对凸轮机构的优化设计将提供较大的帮助。
本文通过对对心直动尖顶盘型凸轮机构进行运动仿真分析,更加明确了该机构的优缺点,对于该机构的优化设计以及该机构以后的用途将提供指导作用。
关键词:凸轮机构 Pro/E 运动仿真运动分析AbstractSimulation technology in the mechanical products design plays an important role. In some mechanical transmission structures,the cam mechanism is used widely, Introducs the method of cam design and modeling in Pro/E,and mainly expiains the kinematics analysis and the simulasion by using Pro/E Wildfire Mechanism ,it will provide useful help to the optimized design of cam mechanism. This article through to the heart of translational knife-edge plate cam mechanism motion simulation analysis, more clearly the advantages and disadvantages, for the optimal design of the mechanism as well as the agency later use will provide guidance.Key Words:cam mechanism ;Pro/E;motion simulation;motion analysis第1章任务与课题条件1.1 任务为了对凸轮机构进行更好的优化设计以及对凸轮机构以后的应用起指导作用,因此基于pro/e对盘型凸轮机构进行设计与运动仿真,并对速度和加速度进行分析,研究该盘型凸轮机构的运动情况,并对该凸轮机构以后的应用作出预测。
基于PRO_E与ADAMS二级行星齿轮传动系统的动力学研究_张学军_郭俊超
齿轮传动系统的实体模型,以动力学分析软件 ADAMS 为平台建立虚拟样机模型,进行传动系统的运
动学与动力学仿真。仿真得到系统的传动比、输出轴的输出速度以及齿轮之间的径向力与圆周力,
结果与理论计算结果吻合度很高,说明虚拟样机模型的构建合理。仿真结果可对多级行星齿轮减速
器的优化设计和工程分析提供理论依据。
齿轮的参数化建立过程: ①齿轮参数与关系式的 输入: 在 PRO / E 界面主菜单上单击“工具”“参数”,系 统会弹出“参数”对话框。在该对话框中单击“添加” 按钮,依次输入建立齿轮模型所需要的参数名称、值和 说明。在主菜单上单击“工具”“关系”,在“关系”对话 框中输入齿轮的分度圆直径关系、基圆直径关系、齿根 圆直径关系 和 齿 顶 圆 直 径 关 系。② 齿 轮 基 本 圆 的 创 建; ③渐开线的创建; ④拉伸实体; ⑤阵列轮齿; ⑥其它 特征的创建。
4. 2 碰撞过程中碰撞参数的选取
在 ADAMS 的运动仿真过程中,为使齿轮间啮合
力与实际效果更为接近,需要对齿轮件以及齿轮与行
星架间定义碰撞参数。碰撞过程可以认为是一个变结
构的动力学问题,对接触碰撞过程的描述目前主要有
两种: 经典碰撞模型和接触变形模型。经典碰撞模型
不能给出 碰 撞 时 间,无 法 计 算 碰 撞 时 的 冲 击 力。在
( School of Mechanical Engineering of Northeast DianLi University ,Jilin Jilin 132012,China) Abstract: M ulti-stage planetary gear hascomplex structure. Its kinematics and dynamicsperformanceis difficult todetermine. In this paper,tw o-stage planetarygear transmissionfor the study,to determine the correctparametersbetw een thesun gearmeshingplanetarygearw heel andtheuse of3D modeling softw arePRO / Ecreate a physicalmodel ofthe planetarygear system,adynamic analysis softw areADAM Splatformcreate a virtualprototypemodel for thetransmissionof thekinematics and dynamicssimulation. Radial forceobtained by simulationsystemsandperipheral forcetransmission ratio,the output speed of the output shaftand the gearbetw eentheresultsanda highdegree of matchingresults,build a reasonableexplanationvirtualhoodmodel. The simulation resultscan provide the basisfor themulti-stage planetary gear reduceroptimal designandengineering analysis. Key words: tw o-stage planetary gear; virtual prototyping; collision; dynamic simulation
2K-H(A)型行星轮系“模型化”分析

大家谈DISCUSSIONOCCUPATION2013 08186摘 要:本文首先从实体上建立了行星轮系的物理模型,根据力的平衡和能量守恒关系推导出行星轮系的运动方程;然后从理论上对2K-H(A)行星轮系建立了数学模型,结合数理分析,得出了同样的运动方程。
这种“模型化”的分析方法揭示了行星轮系传递运动的内在规律性,为其他轮系的分析提供了新的方法。
关键词:2K-H(A)行星轮系 模型化 物理模型 数学模型2K-H(A)型行星轮系“模型化”分析文/徐志山行星轮系属于非定轴轮系,它结构紧凑、重量轻,可以实现多个传动比,在传动、减速机构中多有应用。
所谓2K-H(A)型行星轮系,就是两个中心轮和一个行星架组成的行星齿轮传动机构,结构示意图如图1所示,主要由四部分组成:中心太阳轮A、齿圈B、行星轮C和行星架H,其中A、B、H的转动轴在一条直线上,称为行星轮系的基本构件,且轴线固定,C可以绕该转动轴转动。
设A、B、C的齿数分别为z A 、z B 和z C ,它们的模数都相同,明显有z A <z B 。
这种机构看起来简单,但传动规律分析起来比较复杂。
对该机构的分析方法有“转化机构法”“速度矢量法”“等效杠杆法”“图论法”等,这些方法分别从不同的侧面对行星轮系传动规律分析进行了有效的尝试,取得了较好的效果,但都不易于直观理解。
“模型化”分析是一种简化分析方法,将2K-H(A)型行星轮系简化为两个模型,即“物理模型”和“数学模型”,通过对模型进行物理分析和数学分析,来揭示行星轮系的传动规律。
图1 2K-H(A)型行星轮系的结构示意图一、2K-H(A)型行星轮系“模型化”假设1.假设承受一定载荷的行星轮系在传动过程中传递运动和动力,为了便于分析,首先提出三点假设。
第一,若行星轮系中定轴主动件匀速转动,则其他各个定轴从动件都处于匀速转动——运动假设。
第二,若不考虑行星轮系各构件间的摩擦和制动带来的能量损失,则该轮系的输入功率等于输出功率——能量守恒假设。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
黄
石
理
工
学
院
学
报
Vo . 6 No 5 12 . 0t c. 2 1 00
J OUR NAL OFHU ANGS N TT E OF T HNO OGY HII S IUT EC L
di1 . 9 9 ji n 1 0 8 4 . 0 0 0 .0 o:0 3 6 /。s . 0 8— 2 5 2 1 . 5 0 5 s
收 稿 日期 :00—0 21 6—1 9 +基 金项 目 : 北 省 机 械 电子 工 程 重 点 学 科 资助 。 湖 作 者简 介 : 肖新 华 ( 99 17 一 ) 男 , 北 阳新 人 , 师 , 士 。 , 湖 讲 硕
M o e e tS m u a i n a d M o ei f v m n i l to n dl ng o
2K — H p i y l e r Tr i s Ba e n Pr /E Ty e Ep c c i G a a n s d o o c
Ke o d P / ; y w r s: m E 2K —H y e e c c c g a r i ; o ei m o e e tsmu ai n t p piy l e rtans m d l i ng; v m n i l to
2 K—H 型 周 转 轮 系 机 构 是 机 械设 备 常 用 的 机构 , 了提 高工作 效 率 , 为 需要 提高 轮 系机构 的工
t n a ay i o e d vc e e r aie s n r/ c a i m mo ue,w ih l i o n ain frt e f rh rd s n, i l s ft e i e w r e lz d u i g P o Me h n s d l o n s h h c ad fu d t o h u t e e i o g p o u t n a d e gn e i g a a y i. r d c o n n i e rn l s i n s
Ab ta t T e s l d lo K —H p p c ci e r r is o r / ¥b i n e s t n y a c smu a s r c : h oi mo e f d 2 t ee iy l g a an n P o E wa u l a d t ti a d d n mi i l - y c t t h ac
对 2 K—H 型 周 转 轮 系 机 构 的零 件 进 行 三 维
实 型 要 用 到 Po E 中 常 用 的 操 作 方 法 , 拉 伸 、 r/ 如 旋
如 测量 、 计算 和干 涉情 况 , 以及 检查 设计 模 型 的曲 面 曲率 和连续 性等 。P E的 机构 运 动 分 析 模块 m/
XI 0 n u A Xi h a
(colf ehn aadEe r c ni en , uns ste f eho g, uns ue4in u cnl y H agh H bi303 c co E n i i h I t t oT i o i
进行静、 动力学仿真分析 , 为进一步的设计 、 制造及工程分析奠定 了基础 。
关 键 词 :m E 2 H型周转 轮系机构 ; ; 动仿 真 P / ;K— 建模 运
中图分类 号 : P 9 . 文 献标 识码 : 文 章编 号 :0 8— 2 5 2 1 ) 5— 0 5— 3 T 3 19 A 10 8 4 ( 0 0 0 0 1 0
P / o r E建 立 2 —H 型 周 转 轮 系 机 构 , 潜 在 的 各 K 对 种设 计问题 进行 预测 , 建造 和实 验前 , 化 设计 在 优
方 案 “。
1 零 件 实 体 模 型 的 建 立
2 —H 型 周 转 轮 系 机 构 有 2个 内 齿 轮 、 K 2个 太 阳轮 、 2个 主 轴 、 1个 支 撑 块 和 1 太 阳 轮 支 架 个
作 速 度 , 速 度 的 提 高 会 对 整 个 设 备 稳 定 产 生 较 但
行测 试 , 并据 此 进 行 优 化 设 计 。 它把 建 立 物理 原 型 的需求 降 到 了最 小 , 增强 了创 造性 , 有 助 于在 并
更 短 的时 间 内提供 优质 的产 品 。
大 的影 响 , 起 振 动 和 降低 运 动 精 度 。本 文 应 用 引
转 、 割 、 工 具 、 角 以及 圆角 等 常用 命 令 。还 切 孔 倒
要 用 到 许 多 特 殊 的 操 作 方 法 , 方 程 式 、 线 绘 如 曲
M cai ehns m具 有 运 动 仿 真 功 能 , 使 机 构 由静 变 能
动, 工程 师可 以对结 构 、 动力 学 和耐用 性 等性 能进
基 于 Po E的 2 r/ K—H 型 周 轮 系 转
机 构 的 建模 与运 动仿 真 半
肖新 华
( 石理 工 学院 机 电工程 学院 , 黄 湖北 黄 石 450 ) 30 3
摘 要 :m E软件建立 2 H型周转轮系机构的实体模型, P/ K— 利用 P0E的机构运动 M cai r / e ls h lm模块 , 对其
组 成 , 图 1—8所 示 。 如
P E是 美 国 T m/ C公 司使用 参 数化特 征造 型技 术 的 C D C M/ A A / A C E集 成 软 件 , 有 零 件 设 计 、 具 装 配 设 计 、 构 分 析 、 动 仿 真 等 功 能。 运 用 结 运
P / 软件 , 计人 员 可 创 建 各 种 类 型 的分 析 , mE 设 例