神经网络模糊非参数模型自适应控制及仿真
神经网络非线性系统辨识与模型参考自适应控制器设计

试论述神经网络系统建模的几种基本方法。
利用BP 网络对以下非线性系统进行辨识。
非线性系统22()(2(1)1)(1)()1()(1)y k y k y k u k y k y k -++=+++-1)首先利用u(k)=sin(2*pi*k/3)+1/3*sin(2*pi*k/6),产生样本点500,输入到上述系统,产生y(k), 用于训练BP 网络;2)网络测试,利用u(k)=sin(2*pi*k/4)+1/5*sin(2*pi*k/7), 产生测试点200,输入到上述系统,产生y(k), 检验BP/RBF 网络建模效果。
3)利用模型参考自适应方法,设计NNMARC 控制器,并对周期为50,幅值为+/- 的方波给定,进行闭环系统跟踪控制仿真,检验控制效果(要求超调<5%)。
要求给出源程序和神经网络结构示意图,计算结果(权值矩阵),动态过程仿真图。
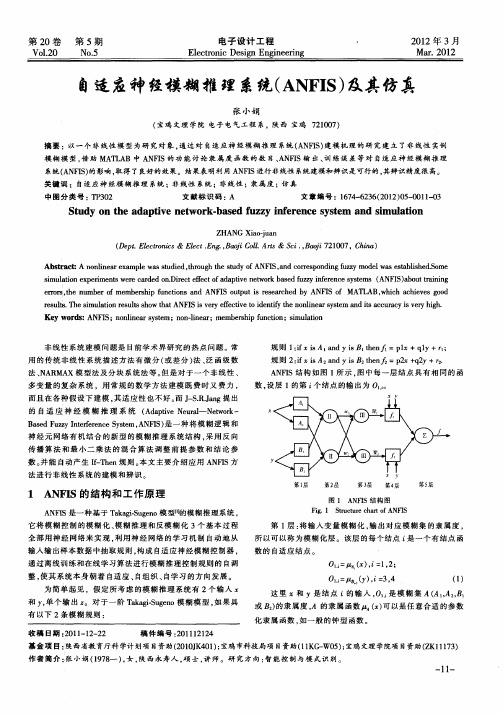
1、系统辨识题目中的非线性系统可以写成下式:22()(2(1)1)(1)()();()1()(1)y k y k y k f u k f y k y k -++=•+•=++- 使用BP 网络对非线性部分()f •进行辨识,网络结构如图所示,各层神经元个数分别为2-8-1,输入数据为y(k-1)和y(k-2),输出数据为y(k)。
图 辨识非线性系统的BP 网络结构使用500组样本进行训练,最终达到设定的的误差,训练过程如图所示图网络训练过程使用200个新的测试点进行测试,得到测试网络输出和误差结果分别如下图,所示。
从图中可以看出,相对训练数据而言,测试数据的辨识误差稍微变大,在±0.06范围内,拟合效果还算不错。
图使用BP网络辨识的测试结果图使用BP网络辨识的测试误差情况clear all;close all;%% 产生训练数据和测试数据U=0; Y=0; T=0;u_1(1)=0; y_1(1)=0; y_2(1)=0;for k=1:1:500 %使用500个样本点训练数据U(k)=sin(2*pi/3*k) + 1/3*sin(2*pi/6*k);T(k)= y_1(k) * (2*y_2(k) + 1) / (1+ y_1(k)^2 + y_2(k)^2); %对应目标值Y(k) = u_1(k) + T(k); %非线性系统输出,用于更新y_1if k<500u_1(k+1) = U(k); y_2(k+1) = y_1(k); y_1(k+1) = Y(k); endendy_1(1)=; y_1(2)=0;y_2(1)=0; y_2(2)=; y_2(3)=0; %为避免组合后出现零向量,加上一个很小的数X=[y_1;y_2];save('traindata','X','T');clearvars -except X T ; %清除其余变量U=0; Y=0; Tc=0;u_1(1)=0; y_1(1)=0; y_2(1)=0;for k=1:1:200 %使用500个样本点训练数据U(k)=sin(2*pi/4*k) + 1/5*sin(2*pi/7*k); %新的测试函数Y(k) = u_1(k) + y_1(k) * (2*y_2(k) + 1) / (1+ y_1(k)^2 + y_2(k)^2); if k<200u_1(k+1) = U(k); y_2(k+1) = y_1(k); y_1(k+1) = Y(k); endendTc=Y; Uc=u_1;y_1(1)=; y_1(2)=0;y_2(1)=0; y_2(2)=; y_2(3)=0; %为避免组合后出现零向量,加上一个很小的数Xc=[y_1;y_2];save('testdata','Xc','Tc','Uc'); %保存测试数据clearvars -except Xc Tc Uc ; %清除其余变量,load traindata; load testdata; %加载训练数据和测试数据%% 网络建立与训练[R,Q]= size(X); [S,~]= size(T); [Sc,Qc]= size(Tc);Hid_num = 8; %隐含层选取8个神经元较合适val_iw =rands(Hid_num,R); %隐含层神经元的初始权值val_b1 =rands(Hid_num,1); %隐含层神经元的初始偏置val_lw =rands(S,Hid_num); %输出层神经元的初始权值val_b2 =rands(S,1); %输出层神经元的初始偏置net=newff(X,T,Hid_num); %建立BP神经网络,使用默认参数 %设置训练次数= 50;%设置mean square error,均方误差,%设置学习速率{1,1}=val_iw; %初始权值和偏置{2,1}=val_lw;{1}=val_b1;{2}=val_b2;[net,tr]=train(net,X,T); %训练网络save('aaa', 'net'); %将训练好的网络保存下来%% 网络测试A=sim(net,X); %测试网络E=T-A; %测试误差error = sumsqr(E)/(S*Q) %测试结果的的MSEA1=sim(net,Xc); %测试网络Yc= A1 + Uc;E1=Tc-Yc; %测试误差error_c = sumsqr(E1)/(Sc*Qc) %测试结果的的MSEfigure(1);plot(Tc,'r');hold on;plot(Yc,'b'); legend('exp','act'); xlabel('test smaple'); ylabel('output') figure(2); plot(E1);xlabel('test sample'); ylabel('error')2、MRAC 控制器被控对象为非线性系统:22()(2(1)1)(1)()();()1()(1)y k y k y k f u k f y k y k -++=•+•=++- 由第一部分对()f •的辨识结果,可知该非线性系统的辨识模型为:(1)[(),(1)]()I p y k N y k y k u k +=-+可知u(k)可以表示为(1)p y k +和(),(1)y k y k -的函数,因此可使用系统的逆模型进行控制器设计。
应用自适应神经模糊推理系统(ANFIS)进行建模与仿真
‘
- f: t t
一 qy+ t
=
+i f it
建 立 起 模 糊 模 型 , 以 此 为 基 础 设 计 模 糊 控 制 系 统 。 但 这 种 并 传 统 的 模 糊 系 统 不 能 自 动 地 将 人 类 专 家 的 知 识 经 验 转 化 为 推理 规 则库 , 乏 有 效 的方法 来 改进 隶 属 函数 以减 少 输 出误 缺 差 或 提 高 性 能 指 标 。 J 一S . .R. ag提 出 的 自适 应 神 经 模 糊 Jn
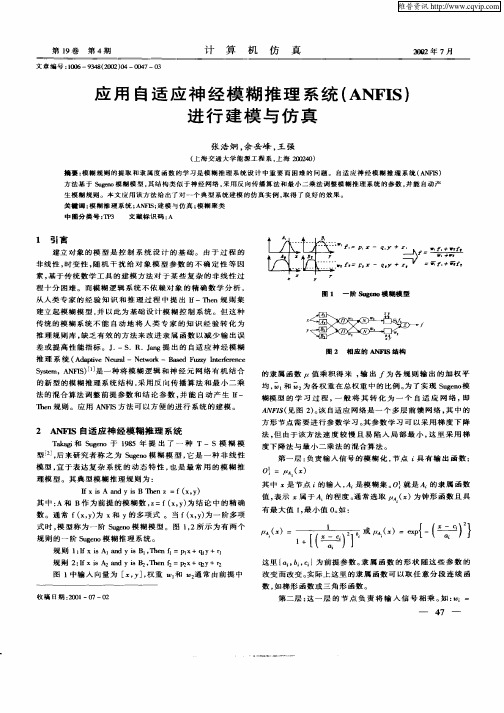
A I ( 图 2 。 自适应 网络 是一 个 多层 前 馈 网 络 , 中 的 NFS 见 )该 其
方 形节 点需 要 进行 参数 学 习 。 参数 学 习 可 以采 用 梯度 下 降 其 法 , 由于该 方法 速 度 较 慢 且 易 陷 入 局 部 最 小 , 里 采 用 梯 但 这 度 下 降法 与最 小二 乘 法 的混合 算法 。 第 一层 : 责输 入信 号 的模 糊 化 , 点 i 有输 出 函数 : 负 节 具
第 l卷 第4 9 期
文 章 编 号 :0 6—9 4 (0 2  ̄ 一0 4 10 3 S 20 ) 0 7—0 3
计
算
机
仿
真
加。 年 7 2 月
应 用 自适 应 神 经 模 糊 推 理 系统 ( ANF S I) 进 行 建 模 与 仿 真
张 浩 炯 , 岳 峰 , 强 余 王
推 理 系 统 ( d p v er — N tok— B sd F z t fr ̄e A at eN ua i l e r w ae uz I e ee ynr l
自适应神经模糊网络算法在控制系统中的应用研究
自适应神经模糊网络算法在控制系统中的应用研究一、绪论自适应神经模糊网络算法(ANFIS)是一种强大的控制方法,它结合了神经网络和模糊逻辑的优点。
ANFIS能够非线性地建模控制系统,同时具有自适应性,能够根据实时反馈来调整其自身的权重和偏置。
因此,ANFIS广泛应用于控制和预测领域,被誉为是一种优秀的控制方法,本文将对ANFIS在控制系统中的应用进行研究和探讨。
二、ANFIS原理ANFIS是一种前向反馈型神经网络,其输入和输出都是模糊变量。
ANFIS的基本结构由五层神经元构成,分别为:输入层:输入层接收控制系统的输入变量,如温度、湿度、气压等。
模糊化层:模糊化层把输入层的变量通过模糊化函数转化成模糊变量。
推理层:推理层通过模糊规则引擎将模糊变量转换成输出变量。
去模糊化层:去模糊化层将模糊输出转化成实际的数字输出。
输出层:输出层将最终结果输出到控制系统中。
三、ANFIS在控制系统中的应用ANFIS广泛应用于控制系统中的各个领域,如温度控制、机器人控制、交通控制等。
本文将以温度控制系统为例进行探讨。
温度控制是一个复杂的过程,温度受到多种因素的影响,如环境温度、工业生产等。
在传统的PID(proportional-integral-derivative)控制系统中,其控制效果容易受到外部因素的影响。
ANFIS因其自适应性能,可以在复杂的环境下进行温度控制。
温度控制系统中,ANFIS的输入变量可以是环境温度、目标温度、加热器功率等。
ANFIS经过模糊化层和推理层的处理,最终输出实际的加热器功率。
ANFIS通过对控制系统的实时反馈进行学习,动态调整权重和偏置,从而达到优化控制的效果,提高温度控制系统的稳定性和精度。
四、ANFIS优势和不足ANFIS的优势在于它采用了模糊逻辑和神经网络的优点,能够非线性地建模控制系统,同时具有自适应性。
ANFIS表现出的优秀性能使其在实际控制系统中得到了广泛的应用。
但是,ANFIS也存在一些不足之处。
基于GA-BP算法模糊神经网络控制器仿真
本课题得到辽宁省教育厅科学研究计划资助(2004D031) - 1 -基于GA-BP 算法模糊神经网络控制器仿真算法模糊神经网络控制器仿真詹习生1,李书臣1,吴杰1,李铁春2(1.辽宁石油化工大学信息工程学院,辽宁抚顺 113001)(2.中油天然气管道华中输气分公司,湖北武汉 430072)E-mail:xisheng519@ 摘 要要:基于模糊逻辑推理与神经网络控制技术融合,设计一种模糊神经网络控制器。
该控制器利用遗传算法(GA)优化隶属度函数,采用误差反向传播学习(BP)算法在线调节神经网络权值,提高了控制器的稳定性,鲁棒性和适应性。
针对一类具有大惯性和大纯滞后并且参数时变的工业过程进行仿真具有工程应用价值,仿真结果验证该控制器的有效性。
关键词:模糊控制;神经网络;GA-BP 算法;仿真中图分类号中图分类号::TP183 TP183 文献标识码文献标识码文献标识码:: A1引言引言模糊系统和神经网络都是对人的智能的一种模拟,它们均可以从给定的系统的输入/输出数据中, 采用并行处理的方式,建立系统的非线性模型[1-2],但是模糊系统和神经网络又各有优缺点,神经网络具有容错能力强以及具备自适应学习的优点,但是神经网络不适于表达基于规则的知识,因此在神经网络进行时,由于不能很好的利用已有的知识,常常只能将初始权值取为零或随机数,从而增加了网络的训练时间或陷于非要求的局部极值,相反,模糊系统是建立在被人容易接受的“if-then ”表达方式上,而且它是建立在专家知识的基础上,但是模糊系统的显著特点是控制精度不高,自适应能力有限,存在稳态误差,可能引起震荡。
本文在充分利用二者的优点的基础上,设计一种模糊神经网络控制器。
目前,广泛研究的神经网络采用的是误差反向传播(BP)算法,它具有简单和可塑的优点,但它是基于梯度的方法,这种方法的收敛速度慢,且常常受局部极小点的困扰。
遗传算法(Genetic Algorithm ,简称GA)[3-4]作为一种基于自然遗传学机理的优化方法,通过随机但有目的搜索机制来寻找全局最优解,为了发挥GA 算法和BP 算法的长去,采用GA-BP 算法优化模糊神经网络控制器参数,提高了控制器的鲁棒性和适应性,仿真结果证实控制器的有效性。
基于RBF模糊神经网络控制器的设计及仿真
基于RBF模糊神经网络控制器的设计及仿真作者:滕利强来源:《科技资讯》 2011年第9期滕利强(河海大学常州校区机电工程学院江苏常州 213022)摘要:本文结合模糊控制和神经网络控制各自的特点,设计了RBF模糊神经网络控制器,并应用到洗衣机的控制中。
最后,在MATLAB中实现了仿真达到了预期的误差精度要求。
关键词:模糊神经网络 RBF神经网络仿真中图分类号:TP319.3 文献标识码:A 文章编号:1672-3791(2011)03(c)-0032-01本文将神经网络与模糊控制相结合,为模糊控制器提供了良好的学习功能,并自动生成模糊控制规则。
通过神经网络实现的模糊控制,对于知识的表达是隐含地分布到整个网络中。
在控制应用时,不必进行复杂的规则搜索和推理,只需要通过高速并行的分布计算就可以输出结果。
1 神经网络的选择及简介目前,在人工神经网络的实际应用中,绝大部分的神经网络模型都采用BP网络及其变化形式,它也是前向网络的核心部分,体现了人工神经网络的精华。
众所周知,BP网络权值的调整采用的是负梯度下降法,这种调节权值的方法有其局限性,即收敛速度慢和局部极小等。
本文将采用逼近能力、分类能力、学习速度和不存在局部极小等方面均优于BP网络的另一种网络——径向基函数网络(Radial Basis Funtion,RBF),来实现与模糊控制的融合。
2 基于模糊神经网络控制器的设计实例下面用洗衣机的控制为例来说明模糊神经控制器的设计过程。
为简化控制过程,用浑浊度及其浑浊度变化率作为控制系统的输入参量,洗涤时间作为系统的输出。
考虑到适当的控制性能需求和程序的简化,定义输入量浑浊度H的模糊词集为{清、较浊、浊、很浊},定义浑浊度变化率HC的模糊词集为{零、小、中、大}。
定义输出变量U的模糊词集为{短、较短、标准、长},输入和输出的论域都定义为[-6,6]。
模糊控制规则是通过总结实际的控制经验而得来的。
洗衣机的模糊控制规则可以归纳为16条,如表1所示。
自适应神经模糊推理系统(ANFIS)及其仿真
Vo .0 1 2 No5 .
电子 设计 工程
Elc r n c De i n E g n e i g e to i sg n i e rn
21 0 2年 3月
Ma . 0 2 r 2 1
自适应神经模糊推理 系 ̄( N I ) A F S 及其仿真
张 小 娟
数 , 层 l的第 i 结 点 的输 出 为 O 设 个 。
s uai x ei e t w r r e n i c e e t f d pie e okb sdfzy nee c s m ( N I ) o t rii i l o e p r ns ee ad do . r t f c o a t t r ae z frn e yt s A FS a u a n m tn m c D e f a vn w u i s e b t n g
e r m , e n mb ro mb rh p f n t n n ro t u e fme es i u c i s a d ANF S o t u s r s ac e y ANF S o MAT AB, h c c iv s g o h o I u p ti e e r h d b I f L w ih a h e tE g,aj C l A t S i ,aj 7 10 , hn ) D p. lc o i r s l .n .B oi o1 r c . s& c .B oi 20 7 C i a
Ab t a t A o l e re a l ssu id, r u h t esu y o s r c : n n i a x mp ewa t d e t o g t d fANF S, n o r s o d n zy mo e a sa l h dS me n h h I a d c re p n i gf z d l se tb i e .o u w s
自适应神经模糊推理系统及其仿真应用
自适应神经模糊推理系统及其仿真应用刘雨刚,耿立明,杨威辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛(125105)摘 要:本文介绍了自适应神经模糊推理系统的结构,以及如何用MATLAB 模糊工具箱提供的ANFIS 应用工具仿真,完成训练模糊神经网络。
关键词:自适应神经模糊推理系统,MATLAB ,模糊神经网络0 引言由Jyh-Shing R.Jang 提出的自适应神经模糊推理系统[1],是一种基于Takagi -Sugeno 模型的模糊推理系统(简称ANFIS )。
研究表明,当输入模糊集采用非梯形/非三角形的隶属函数时,Sugeno 型模糊系统需要的模糊规则及输入的模糊集的个数较少。
1 基于Takagi -Sugeno 模型的自适应神经模糊推理系统所考虑的模糊推理系统有两输入和,单输出f 。
1x 2x 对于零阶T-S 模糊模型,模糊规则的第i 条规则有如下形式:⑴ 后件为恒值:Ri : ),...,2,1( , 221121n i f y Then A x A x If i i i ==是和是⑵ 后件为一阶线性方程:Ri :0,1,2)(j ),( ,...,2,1 ),( , 221102*********是常数是和是=++===ij i i i i i i i a x a x a a x x f ni x x f y Then A x A x If 式中,Ri 表示第i 条规则,Ai 表示模糊子集,即{NL ,NM ,NS ,ZO ,PS ,PM ,PL}={“负大”,“负中”,“负小”,“零”,“正小”,“正中”,“正大”}。
在T-S 模型中,每条规则的结论部分是个线性方程,表示系统局部的线性输入/输出关系,而系统的总输入是所有线性子系统输出的加权平均,可以表示全局的非线性输入输出关系,所以,T-S 模型是一种对非线性系统局部线性化的描述方法,它具有非常重要的研究意义和广泛的应用范围[2]。
基于神经网络模型的自适应控制系统设计及仿真
第一章前言1.1 课题的意义:本毕业设计旨在学习并比较各种自适应控制算法,掌握matlab语言,利用simulink对自适应控制系统模型进行仿真分析。
自适应控制是人们要求越来越高的控制性能和针对被控系统的高度复杂化,高度不确定性的情况下产生的,是人工智能渗入到应用科技领域的必然结果。
并在常规控制理论的基础上得到进一步的发展和提高。
进入21世纪以来,智能控制技术和远程监测技术继续飞速发展,逐渐被应用到电力、交通和物流等领域。
从卫星智能控制,到智能家居机器人;从公共场所的无线报警系统,到家用煤气、自来水等数据的采集。
可以说,智能控制技术和远程监测技术己经渗透到了人们日常生活之中,节约了大量的人力和物力,给人们的日常生活带来了极大的便利。
目前,自适应控制的研究以认知科学、心理学、社会学、系统学、语言学和哲学为基础,有效的把数字技术、远程通信、计算机网络、数据库、计算机图形学、语音与听觉、机器人学、过程控制等技术有机的结合,提供了解决复杂问题的有效手段。
自适应控制是在人们在追求高控制性能、高度复杂化和高度不确定性的被控系统情况下产生的,是人工智能渗入到应用科技领域的必然结果,并在常规控制理论的基础上得到进一步的发展和提高。
主要研究对象从单输入、单输出的常系数线性系统,发展为多输入、多输出的复杂控制系统。
自适应控制理论的产生为解决复杂系统控制问题开辟了新的途径,成为当下控制领域的研究和发展热点。
1.2 国内外研究概况及发展趋势:1943年,心理学家W·Mcculloch和数理逻辑学家W·Pitts在分析、总结神经元基本特性的基础上首先提出神经元的数学模型。
此模型沿用至今,并且直接影响着这一领域研究的进展。
因而,他们两人可称为人工神经网络研究的先驱。
1945年冯·诺依曼领导的设计小组试制成功存储程序式电子计算机,标志着电子计算机时代的开始。
1948年,他在研究工作中比较了人脑结构与存储程序式计算机的根本区别,提出了以简单神经元构成的再生自动机网络结构。
智能控制第7章 模糊神经网络控制与自适应神经网络PPT课件
第五层
❖有两种模式
❖从上到下的信号传输方式 ,同第一层。
❖从下到上是精确化计算,如果采用重心法, 有
fj(5 ) w ( j5 )iu i(5 ) (m ( j5 )i (j5 )i)u i(5 ), i
E fj(4)
E fj(5)
fj(5) fj(4)
E fj(5)
fj(5) u(j5)
u(j5) fj(4)
E fj(5)
m(5) ji
u (5) (5)
ji i
u(j5)
i
u (5) (5) (5) jj jj
(j5i)ui(5))(
m u ) (5) (5) (5) (5)
图7-2 :规则节点合并示例
2. 有导师学习阶段
❖可采用BP学习
E1(y(t)ˆy(t))2min 2
w(t1)w(t)(E w)
E w ( n E )e ( n w t)e tE f w f E f fa w a
第五层
m E (j5)i a E (j5) a fj((j5 5))
wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感34如果被控系统yk1fykyk1uk1gukwwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感351tdltdltdltdl神经网络n神经网络n331基于神经网络的模型参考自适应控制结构图参考模型wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感3671wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感37则控制系统的误差方程为其中wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感383233wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感393233wwwthemegallerycom用一个半导体功率器件作为开关该器件不断地重复开启和关断使得输入的直流电压在通过这个开关器件后变成了方波该方波经过电感40对于yk1fykyk1uk1guk可得如果存在可用神经网络逼近之
模糊神经网络控制与自适应神经网络
利用深度学习技术进一步提升神经网络的 性能,特别是在处理复杂和非线性问题方 面。
自适应控制与强化学习的结合
跨学科研究
将自适应控制和强化学习相结合,以实现 更高级别的智能控制,如自主学习和决策 。
结合计算机科学、数学、工程等多个学科 ,开展跨学科研究,以解决实际应用中的 复杂问题。
THANKS
感谢观看
自然语言处理
自适应神经网络在自然语言处 理领域中可以用于文本分类、 情感分析、机器翻译等任务。
05
模糊神经网络控制与自适应神经网络
的结合
结合方式与实现方法
模糊逻辑与神经网络的融合
将模糊逻辑的推理过程与神经网络的自学习能力相结合,实现更 高效的控制策略。
模糊神经元设计
在神经网络中引入模糊逻辑,设计具有模糊隶属函数的神经元,实 现模糊逻辑的推理过程。
模糊推理
基于模糊逻辑和模糊规则,通过模糊推理方法对 输入的模糊集合进行处理,得到输出模糊集合。
3
反模糊化
将输出模糊集合转换为精确值,通常采用最大值、 最小值或中心平均值等方法进行反模糊化处理。
模糊神经网络在控制中的应用
控制系统建模
利用模糊神经网络对非线性、不 确定性和时变性的系统进行建模, 提高控制系统的鲁棒性和适应性。
控制策略设计
基于模糊逻辑和神经网络的结合, 设计自适应控制策略,实现对复 杂系统的有效控制。
智能控制
将模糊神经网络应用于智能家居、 机器人等领域,实现智能化控制 和自主决策。
模糊神经网络控制的优势与挑战
优势
能够处理不确定性和非线性问题,具有较好的鲁棒性和适应性;能够处理不完全 和不精确的信息,适用于复杂系统的控制。
挑战
如何选择合适的隶属度函数和模糊规则,以更好地逼近实际系统;如何提高模糊 神经网络的泛化能力和训练效率;如何处理大规模和高维度的数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
也可用符号函数 sign ( ∂y (k + 1) )来取代。 ∂u(k )
∂u(k )
因此 BP 神经网络 NN 输出层的加权系数计算公式为
∆ω
(3) i
(k
+ 1)
=
ηδ
o (3) (2) i
(k)
+
α∆ω
(3) i
(k ),
δ (3) = e(k + 1)sign( ∂y (k + 1) ) × ∂u(k ) g ′[net (3) (k )].
别表示系统的阶数,
∆y(k +1) = y(k +1) − y(k), (3)
∆u(k) = u(k) − u(k −1),
φ(k) 为基于紧格式线性化的伪偏导数。这种控制方案只需要
受控系统的 I/O 数据[1-3],与系统的模型结构、系统阶数无关。
收稿日期:2005-04-05
修回日期:2006-03-03
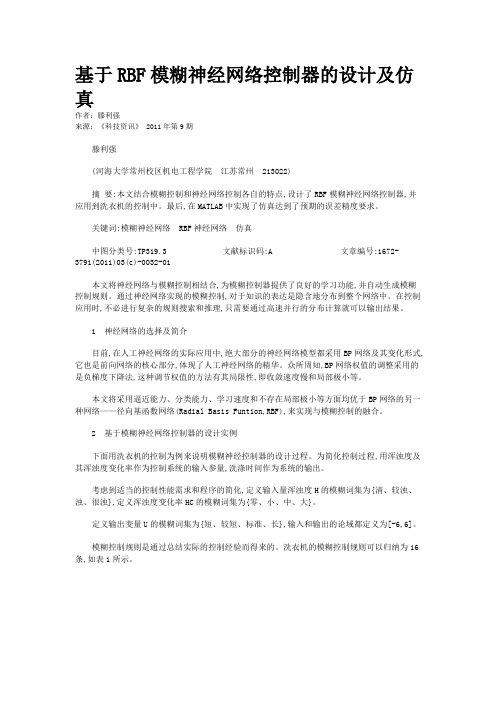
3) 神经网络 NN:根据系统的运行状态,调整控制器的
参数-伪偏导数φ(k) ,以达到某种性能指标的最优化。即输 出层神经元的输出状态对应于伪偏导数φ(k) ,通过神经网络
的自身学习、加权系数调整,从而使其稳定状态对应于某种 最优控制律下的非参数模型自适应控制器的参数。
学习算法
模糊化
NN
+ r(k+1)
Abstract: A fuzzy non-parameter model adaptive control based on neural networks (FNN-NPMAC) was proposed. It is a result of the comprehensive combination of fuzzy control, neural networks, and NPMAC by only using system I/O data. Simulations prove that this controller has good adaptability and robustness to models and environments. Key words: neural networks; fuzzy control; non-parameter model adaptive control; pseudo-partial-derivative
∂u(k ) ∂o(3) (k )
(14)
依据上述推理办法,可得隐含层加权系数的计算公式
∆ωi(j2)
(k
+1)
=
ηδi(2)
o(1) j
(k)
+ α∆ωi(j2)
(k)
δ (2) i
=
f
′[ neti( 2 )
(k
)]δ
ω (3) (3) i
(k
).
i
= 1,2....,Q.
(15)
2.3 神经网络模糊非参数模型自适应控制算法
文献标识码:A
文章编号:1004-731X (2006) 06-1623-03
Fuzzy Non-Parameter Model Adaptive Control Method Based on Neural Networks and Simulations
ZHU Juan-ping1, HOU Zhong-sheng2
基金项目:云南省教育厅基金(5Y0069A); 云南大学校级基金(2003Q030C,
2004Q029C)。
作者简介:朱娟萍(1972-), 女, 湖南邵阳人, 回族, 副教授, 研究方向为
无模型自适应控制、神经网络控制和 PID 控制; 侯忠生(1962-), 教授, 博
导, 研究方向为非线性系统自适应控制及无模型学习自适应控制, 智能
M
∑ neti(2) (k) =
ω
(2) ij
o
(1) j
(k
)
−
θ
i
,
(8)
j =1
o(2) i
(k
)
=
f [neti(2) (k )],
i = 1,...,Q.
(9)
其中
ω
(2) ij
为隐含层权系数,
θ
i
为阈值,上标(1)、(2)、(3)分
别代表输入层、隐层和输出层。f (x)为双曲正切型激励函数。
1) 事先选定 BP 网络的结构,即选定输入层节点数 M
和隐含层节点数
Q,并给出各层加权系数得初值
ω
(2) ij
(0)
、
·1624·
第 18 卷第 6 期 2006 年 6 月
朱娟萍, 等:神经网络模糊非参数模型自适应控制及仿真
Vol. 18 No. 6 Jun., 2006
ω (3) i
(0)
;选定学习速率η
元的激励函数可取正负对称的 Sigmoid 函数。 BP 网络的前向计算和加权系数修正计算如下: 输入节点对应经模糊量化处理后的系统状态变量:
o(1) j
=
Ek− j ,
j = 1,...,M,
k ≥ M.
(7)
Ek−j 取值为 e(k − j) 即为 k−j时刻系统误差的模糊量化值。输 入变量的个数 M取决于被控系统的复杂程度。网络的隐层输 出为
第 18 卷第 6 期 2006 年 6 月
系 统 仿 真 学 报© Journal of System Simulation
Vol. 18 No. 6 Jun., 2006
神经网络模糊非参数模型自适应控制及仿真
朱娟萍 1,侯忠生 2
(1.云南大学数学系, 昆明 650091; 2.北京交通大学电子与信息工程学院, 北京 100044)
引 言1
针对未知受控对象的结构和参数控制系统的设计,国内 外控制理论界已做了多年的努力,已发展了许多的理论和方 法。智能控制和专家控制、模糊控制、多模型方法等都是由 于放松对受控系统数学模型的依赖的期望产生和发展起来 的。1994 年,文献[1]提出了非参数模型学习自适应控制, 该控制方案设计的基本思想是将非线性系统在工作轨线附 近进行折线化。即,一般非线性系统
神经网络是从生理结构上模仿人脑神经元的功能,可作 为一般的函数估计器,能反映输入输出关系,具有学习和适 应能力;模糊逻辑则模仿人脑的逻辑思维机理,用于处理模 型未知或不精确的控制问题,对非线性系统的控制简单、有 效。神经网络和模糊逻辑各有特长,存在着互补性。模糊神 经网络将神经网络与模糊逻辑相结合,这种结合给智能系统 的实现提供了一个新的研究方向[4-5]。本文在这些研究成果 的基础上提出了神经网络模糊非参数模型自适应控制方案。 基于误差准则
修正网络的加权系数,并附加一个搜索加速的惯性项
∆ω
(3) i
(k
+ 1) =
−η
∂J ∂ωi(3)
+
α∆ω
( i
3)
(k
),
(12)
式中η 为学习速率,α 为惯性系数,而
∂J
= ∂J ∂y (k + 1) ×
∂
ω( i
3)
(
k
+ 1)
∂y(k + 1) ∂u(k )
∂u(k ) ∂o(3) (k ) ∂net(3) (k )
·1623·
第 18 卷第 6 期 2006 年 6 月
系统仿真学报
Vol. 18 No. 6 Jun., 2006
过 BP 神经网络模糊方法来获得这个参数。该方案控制结构 如图 1 所示。它包括三个部分:
1) 非参数模型自适应控制律:直接对过程构成闭环控
制,伪偏导数φ(k) 在线整定。
2) 模糊量化模块:对系统的状态变量进行归档模糊量 化和归一化处理。其优点是:利用模糊控制的鲁棒性和非线 性控制作用;相当于对神经网络 NN 的输入进行预处理,避 免了当神经网络用 Sigmoid 函数或双曲正切函数时,由于输 入过大易导致输出趋于饱和,使得对输入不再敏感[6-7]。
的参数φ(k) ;
5) 根据φ(k) 由式(5)计算非参数模型自适应控制的控制
输出 u(k);
6) 由 式 (12)-(15) 计 算 输 出 层 和 隐 含 层 的 加 权 系 数
∆ω
( i
3)
(k
)
和
∆ω
(2) ij
(k
)
。
3 实例仿真
考虑非线性系统
⎧ ⎪⎪1 +
5y(k) y(k −1) y(k )2 + y(k −1)2 + y(k
y(k +1) = f ( y(k), y(k −1),..., y(k − ny ),u(k),u(k −1),
...,u(k − nu )),
(1)
可以写成如下紧格式形式
∆y(k +1) = φ(k)∆u(k).
(2)
其中 y(k),u(k) 分别表示时刻 k 系统的输入与输出, ny,nu 分
(1.Dept. of Mathematics, Yunnan Univ. Kunming 650091, China; 2.School of Electronics and Information Engineering, Beijing Jiaotong Univ., Beijing 100044, China)
0~1 的数量级,即将误差 e 转化为“概念”值,送给神经
网络 NN。
2.2 BP 神经网络
三层 BP 神经网络,其结构如图 2 所示,有 M 个输入节 点、Q 个隐层节点、一个输出节点。输出节点对应非参数模
输 入 层 {E} j
隐含层 i