液压伺服位置系统模型参考模糊自适应PID控制器的设计
伺服控制系统中模糊免疫PID控制器设计

0 引 言
PD控 制结 构简单 , I 易于 调整 维 护 , 是 当被 控 但
对 象具有 非线性 、 时滞 和强耦 合等 特点 时 , 其控 制效
果 并不理 想 , 干扰 能力差 , 抗 超调 大。人 工免疫 系统
细胞 、 免疫 效应 分 子 和相 关 基 因组 成 , 当病 原体 、 有
mai a d d cin wa are u . h n w t h f l e c lu ain,o k u a l e h oo y w se ly d t e fr t e t l e u t sc r d o t T e i t e o — i ac l t c o i h n o lo - p tb et c n lg a mpo e p rom h o f zy i u z mmu e c n r 1 T e P D c n r l r b s d o r g c rid o t te s u n ilsmu ain E p n me t lrs l h w n o t . h I o t l a e n Ve i a r u h q e t i l t . x e i n a e u t s o o oe l e a o s t a t e meh d i r a o a l n a etrp r r n e t a e t d t n lo e T e p o o e t o sef in m— h t h t o s e s n b ea d h sa b t e o ma c n t r i o a n . h r p s d meh d i f ce t o i e f h h a i i t
液压位置伺服系统的模糊免疫自适应PID控制

f z y l c r t c n t n T e mah mai a d lo e h d a l e v o t ls se wa sa l h d T e smu a in f y r u i u z o ai i ai . h t e t lmo e f h y r u i s r o c n r y t m s e tb i e . h i lt s o d a lc o o c t c o s o h s r o c nr ls se w r o e b e v o to y t m e e d n y AME i S m. F zy i u z mmu ea a t eP D o t l lo tm n o v n in I o t l lo t m r n d p i I c n r g r h a d c n e t a P D c n r g r h we e v oa i ol oa i
Ab t a t T e n n i e rt n a a tru c ran y e it d i h o i o ev y t m f a h b t w l i gma hn r n — sr c : h o l a y a d p rmee n et it x se t e p st n s r o s se o s u t e dn c i ewe ea a n i n i l f
免疫反馈响应过程 的调节作 用和模糊逻辑推理的 自适应性 ,设计 出一种模 糊免疫 自适 应 PD控 制器。建立液 压伺服控 制系 I
统的数学模型 ,并利用 A E i M S m建模 与仿真软件对液压伺服控制系 统进行 了分别 采用 模糊免疫 自适应 PD控制与 常规 PD I I 控制 的仿真对 比试 验。结果 表明 :该控制器性能优于传统 的 PD控 制器 ,具有 良好 的快速 响应 特性 、较强 的鲁棒性 和 自适 I
液压位置伺服系统的模糊PID控制研究

液压位置伺服系统的模糊PID控制研究关键词:伺服阀,位置伺服系统,模糊控制,模糊PID时间:2010-10-13 14:12:04 来源:中电网1. 引言当今,在工业、国防等自动化领域,液压伺服系统以其重量轻、体积小、产生力矩大等优点而得到广泛应用。
但由于漏油、油液污染等因素影响,液压伺服系统中普遍存在参数时变、非线性尤其是阀控动力机构流量非线性等现象。
随着对控制精度要求的提高,对液压伺服控制技术也提出了越来越高的要求。
传统PID控制很难达到满意的控制效果,针对这一问题,近年来出现了许多不同的现代控制策略,如神经网络控制、自适应控制、模糊控制、预测控制等。
这些控制方法在理论上取得很大进步,但是在液压伺服控制中还有一些实际问题需要解决[1]。
模糊控制不需要被控对象的精确数学模型,并且可以引入专家经验,因此有较好的实用性。
但单独使用模糊控制不易消除稳态误差,且对控制器运算性能要求较高[2],而PID算法简单又可以较好的消除稳态误差。
对此,本文采用模糊控制与PID控制结合,利用模糊控制实时修正PID参数,提高了系统的控制精度和鲁棒性,有较好的实用性。
2. 液压位置伺服系统图1 液压位置伺服系统结构图如图1所示,该液压位置伺服系统由放大器、电液伺服阀、液压缸、负载以及位置传感器等组成。
输入信号经放大后送入电液伺服阀,小功率电信号经由伺服阀转化为阀芯位移信号,然后转换成流量和压力等液压信号,这些信号最后驱动液压缸带动负载完成指定动作。
因电液伺服阀实现了电液信号的转换和液压功率放大两个功能,故电液伺服阀在伺服系统中起桥梁的作用,是系统的心脏,本文中位置伺服系统采用动铁力矩马达喷嘴挡板式两级电液伺服阀。
根据力矩马达的电压、磁路和运动方程,喷嘴挡板位移与马达的偏角关系以及主阀(对称四通滑阀)的运动方程和流量方程[3],可以推导出电液伺服阀传递函数如下:式中:ωsv为伺服阀固有频率; ξsv为阻尼比; Kq为伺服阀流量增益,应按实际供油压力下的实际空载流量确定,即,qn为伺服阀的额定流量,ps为实际供油压力,psn为伺服阀规定阀压降,一般psn=7MPa,In为伺服阀额定电流。
自适应模糊PID控制器的设计与仿真

自适应模糊PID控制器的设计与仿真自适应模糊PID控制器是一种结合了模糊控制和PID控制的自适应控制器,它能够在系统的不同工况下根据实际需求对PID参数进行自适应调整,从而使得系统具有更好的动态性能和稳定性。
本文将介绍自适应模糊PID控制器的设计思路和仿真过程。
1.设计思路1.1系统建模首先需要对待控制的系统进行建模,得到系统的数学模型。
这可以通过实验数据或者理论分析来完成。
一般情况下,系统的数学模型可以表示为:$G(s)=\frac{Y(s)}{U(s)}=\frac{K}{s(Ts+1)}$其中,K是系统的增益,T是系统的时间常数。
1.2设计模糊控制器接下来需要设计模糊控制器,包括模糊规则、模糊集和模糊运算等。
模糊控制器的输入是系统的误差和误差的变化率,输出是PID参数的调整量。
1.3设计PID控制器在模糊控制器的基础上,设计PID控制器。
PID控制器的输入是模糊控制器的输出,输出是控制信号。
1.4设计自适应机制引入自适应机制,根据系统的性能指标对PID参数进行自适应调整。
一般可以采用Lyapunov函数进行系统性能的分析和优化。
2.仿真过程在仿真中,可以使用常见的控制系统仿真软件,如MATLAB/Simulink 等。
具体的仿真过程如下:2.1设置仿真模型根据系统的数学模型,在仿真软件中设置仿真模型。
包括系统的输入、输出、误差计算、控制信号计算等。
2.2设置模糊控制器根据设计思路中的模糊控制器设计,设置模糊控制器的输入和输出,并设置模糊规则、模糊集和模糊运算等参数。
2.3设置PID控制器在模糊控制器的基础上,设置PID控制器的输入和输出,并设置PID参数的初始值。
2.4设置自适应机制设置自适应机制,根据系统的性能指标进行PID参数的自适应调整。
2.5运行仿真运行仿真,观察系统的响应特性和PID参数的变化情况。
根据仿真结果可以对设计进行调整和优化。
3.结果分析根据仿真结果,可以分析系统的稳定性、动态性能和鲁棒性等指标,并对设计进行调整和改进。
电液伺服振动平台的模糊PID控制器设计

电液伺服振动平台的模糊PID控制器设计刘相波;晁智强;李欣泽;韩寿松;靳莹【摘要】Based on advantages of a small size, easy handling, good safety performance, high power, and so on, the vibration platform uses fuzzy PID control technology, which blends the ordinary PID control algorithm with high control precision and fuzzy control algorithm with flexible. And a fuzzy PID controller is design with MATLAB/Simulink and is used for the electro-hydraulic servo vibration platform, which is powerful self-adjustment function with fast response, no lag, small overshoot, high precision control. By simulation, the fuzzy PID controller can meet the electro-hydraulic servo vibration platform with time-varying parameter perturbations changes, control of nonlin-ear control systems.%基于具有体积小、操控方便、安全性能好、可以实现大功率等优势的振动平台,融合了普通PID控制算法控制精度高和模糊控制算法灵活且具有强大的自调整功能等优点的模糊PID控制技术。
基于模糊控制的液压伺服系统设计与优化

基于模糊控制的液压伺服系统设计与优化引言液压伺服系统是一种广泛应用于工程领域的控制系统,它通过液压传动来实现对机械设备的运动控制。
由于液压伺服系统具有快速响应、大功率输出、稳定性好等特点,因此在工业生产中得到了广泛应用。
然而,液压伺服系统在实际运行过程中存在一些问题,如系统动态性能差、负载扰动对系统控制的影响,这就需要进行系统设计与优化,以提高液压伺服系统的性能。
一、液压伺服系统的设计1.1 系统功能需求分析首先,根据实际需求分析液压伺服系统的功能需求。
这包括系统输入输出要求、位置和速度控制要求、系统精度要求等。
通过详细的需求分析,可以明确系统设计的目标与方向。
1.2 系统结构设计液压伺服系统的结构设计是系统设计的关键步骤之一。
在设计中,需要考虑液压元件的选择、结构参数的确定以及系统各个部分之间的关系。
通过合理的系统结构设计,可以提高液压伺服系统的稳定性和响应速度。
1.3 传感器选择与布置液压伺服系统的传感器选择与布置对系统的控制性能有着重要影响。
在选择传感器时,需要考虑传感器的测量范围、精度、响应速度等因素。
同时,需要合理布置传感器以满足位置和速度的测量要求。
1.4 控制器设计液压伺服系统的控制器设计是实现系统控制的关键。
基于模糊控制的设计方案可以考虑,其可以通过模糊逻辑对液压伺服系统进行模糊建模与控制,以提高系统的鲁棒性和控制精度。
二、液压伺服系统的优化2.1 参数优化对液压伺服系统的参数进行优化是提高系统性能的关键。
通过调整液压系统中的参数,例如比例阀的开口度、平衡弹簧的刚度等,可以使液压伺服系统的响应速度和稳定性得到提高。
2.2 控制策略优化在液压伺服系统的控制过程中,选择合适的控制策略也对系统的性能起着重要影响。
除了模糊控制之外,还可以考虑其他控制策略,如PID控制、自适应控制等。
通过比较不同的控制策略,可以选择最适合系统的控制策略,以实现优化控制。
2.3 系统鲁棒性优化在液压伺服系统的设计中,鲁棒性是一个重要的指标。
液压伺服位置控制系统
液压伺服位置控制系统2 模型参考模糊自习惯操纵器的设计在液压伺服系统中系统的开环增益K0与ζn1的变化,容易引起系统的超调与振荡,使系统变得难以用常规的操纵算法进行操纵。
而用模型参考自习惯(MRAC)操纵时,由于系统的阶次较高,操纵器参数的自习惯律很难求得。
用模糊操纵设计自习惯机构只要根据操纵器参数的变化规律,用模糊条件语句写出操纵规则者,就能够找出比较合适的自习惯算法。
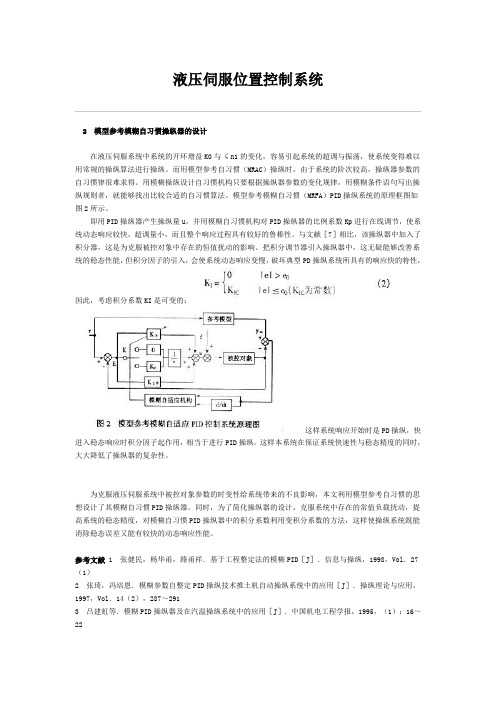
模型参考模糊自习惯(MRFA)PID操纵系统的原理框图如图2所示。
即用PID操纵器产生操纵量u,并用模糊自习惯机构对PID操纵器的比例系数Kp进行在线调节,使系统动态响应较快,超调量小,而且整个响应过程具有较好的鲁棒性。
与文献[7]相比,该操纵器中加入了积分器,这是为克服被控对象中存在的恒值扰动的影响。
把积分调节器引入操纵器中,这无疑能够改善系统的稳态性能,但积分因子的引入,会使系统动态响应变慢,破坏典型PD操纵系统所具有的响应快的特性,因此,考虑积分系数KI是可变的:这样系统响应开始时是PD操纵,快进入稳态响应时积分因子起作用,相当于进行PID操纵。
这样本系统在保证系统快速性与稳态精度的同时,大大降低了操纵器的复杂性。
为克服液压伺服系统中被控对象参数的时变性给系统带来的不良影响,本文利用模型参考自习惯的思想设计了其模糊自习惯PID操纵器。
同时,为了简化操纵器的设计,克服系统中存在的常值负载扰动,提高系统的稳态精度,对模糊自习惯PID操纵器中的积分系数利用变积分系数的方法,这样使操纵系统既能消除稳态误差又能有较快的动态响应性能。
参考文献 1 张健民,杨华甬,路甬祥.基于工程整定法的模糊PID[J].信息与操纵,1998,Vol.27(1)2 张琦,冯培恩.模糊参数自整定PID操纵技术推土机自动操纵系统中的应用[J].操纵理论与应用,1997,Vol.14(2),287~2913 吕建虹等.模糊PID操纵器及在汽温操纵系统中的应用[J].中国机电工程学报,1995,(1):16~224 李卓,萧德云,何世忠.基于Fuzzy推理的自调整PID操纵器[J].操纵理论与应用,1997,Vol.14(2),238~2425 黎芳,梁慧冰.一种模型参考模糊PI-PD操纵器[J].广州工业大学学报.1998,46 王红君,赵辉,华岩.模糊参数自习惯PID操纵器在同步发电机励磁系统中的应用[J].电气传动.2000,No(2)7 章卫国,杨向忠著.模糊操纵原理与应用[M].西安:西北工业大学出版社,1999。
基于模糊PID电液伺服控制系统的设计和仿真

轻工 扔糖
Li htI u t yM a h n r g nd s r c i e y
V0 _ 8 No 3 l2 .
J n. 0 0 u 2 1
[ 自控 ・ 检测 ]
D I 036/ in1 5 8521.309 O: . 9js . 0-9. 00.1 1 9 .s 0 2 0
基于模 糊 P I D电液 伺服控制 系统 的 设 计 和 仿 真
赵一鹏 , 姜
( 江 工业大 学 机械 工程 学院 , 江 杭 州 浙 浙
摘
伟
30 1 ) 104
要 : 统 PD控 制在 受到外界 干扰 时 , 易产生过大超调 , 传 I 容 使得 系统的动静 态性 能变差。采用 PD控 制和模糊控 制 I
0 引 言
采用传统 PD控制无法头 I
j 精确控制 。文章
PD控制是 比例 、 I 积分 、 微分控制 的简称 , 其价值 取决 于他 们对 大多数 控 制 系 统 的广 泛 适用 性 , 特别 是
当被 控对象 的 数 学模 型 已知 时 ,I 制 就 显 得 特别 PD控
将模糊控制和 PD控制相结合 , I 构成模糊 PD控制法 , I 既具 有模糊 控制 的灵活 、 适应 性 强 的优点 , 具 有 PD 又 I 控制精 度高 的特点 心 。 ]
相结合的模糊 P D控制方法 , I 在线调整 PD参数。通过 MA L B S l k进行仿真 , I T A /i i mu n 结果表 明改善了系统的动静态性 能 。 同时也提高了控 制系统 的抗 干扰能力 。图 6表 3参 l 3
关 键 词: 自动 控 制 ; 液伺 服 ; 糊 PD 控 制 ; 真 ;iuik软件 电 模 I 仿 Sm l n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
万方数据
万方数据
万方数据
液压伺服位置系统模型参考模糊自适应PID控制器的设计
作者:方一鸣, 黄镇海, 焦晓红
作者单位:燕山大学电气工程学院,河北,秦皇岛,066004
刊名:
自动化与仪器仪表
英文刊名:AUTOMATION & INSTRUMENTATION
年,卷(期):2002(3)
被引用次数:12次
1.王红君;赵辉;华岩模糊参数自适应PID控制器在同步发电机励磁系统中的应用[期刊论文]-电气传动 2000(02)
2.黎芳;梁慧冰一种模型参考模糊PI-PD控制器 1998
3.李卓;萧德云;何世忠基于Fuzzy推理的自调整PID控制器 1997(02)
4.吕建虹模糊PID控制器及在汽温控制系统中的应用 1995(01)
5.张琦;冯培恩模糊参数自整定PID控制技术推土机自动控制系统中的应用 1997(02)
6.张健民;杨华甬;路甬祥基于工程整定法的模糊PID[期刊论文]-信息与控制 1998(01)
7.章卫国;杨向忠模糊控制原理与应用 1999
1.潘永平.王钦若.严兴华.PAN Yong-ping.WANG Qin-ro.YAN Xing-hua液压伺服系统的模型参考自适应模糊控制新方法[期刊论文]-电气传动自动化2007,29(2)
2.潘永平.王钦若.严兴华.PAN Yongping.WANG Qinruo.YAN Xinghua液压伺服系统的模型参考自适应模糊控制新方法[期刊论文]-机床与液压2007,35(4)
3.尚智强液压伺服位置系统模型参考模糊自适应PID控制器的设计[期刊论文]-自动化与仪器仪表2002(3)
4.党开放.周瑞祥.林廷圻基于模型参考模糊自适应的电液位置伺服系统鲁棒控制研究[期刊论文]-机床与液压2003(4)
1.郭秀丽.陆怀民采伐联合机设计与研究[期刊论文]-机械设计 2010(8)
2.仲伟峰.何小溪电液位置伺服系统的模糊神经网络控制[期刊论文]-电机与控制学报 2008(4)
3.王亮.王永利基于DSP的电液伺服机构控制[期刊论文]-液压与气动 2007(3)
4.孟利军.凡永华.杨军.李言俊地地导弹快速起竖装置的同步自动控制器设计[期刊论文]-弹箭与制导学报
2007(3)
5.凡永华.孟利军.李鑫.杨军地地导弹瞄准系统的模糊-PI复合控制器设计[期刊论文]-弹箭与制导学报 2007(2)
6.潘永平.王钦若.严兴华液压伺服系统的模型参考自适应模糊控制新方法[期刊论文]-机床与液压 2007(4)
7.潘永平.王钦若.严兴华液压伺服系统的模型参考自适应模糊控制新方法[期刊论文]-电气传动自动化 2007(2)
8.肖晨静.欧阳昌.凡永华.杨军地地导弹快速起竖装置的模糊控制器设计[期刊论文]-弹箭与制导学报 2007(5)
9.张飞热连轧综合AGC系统的研究[学位论文]博士 2007
10.刘占新舞钢宽厚板轧机液压AGC控制系统的研究[学位论文]硕士 2006
11.李兵酸洗开卷破鳞电液比例控制系统改造[学位论文]硕士 2005
12.牛巍4200mm轧机液压AGC控制系统研究[学位论文]硕士 2005
本文链接:/Periodical_zdhyyqyb200203003.aspx。