跨摄像头运动目标检测与识别
跨摄像头目标跟踪综述
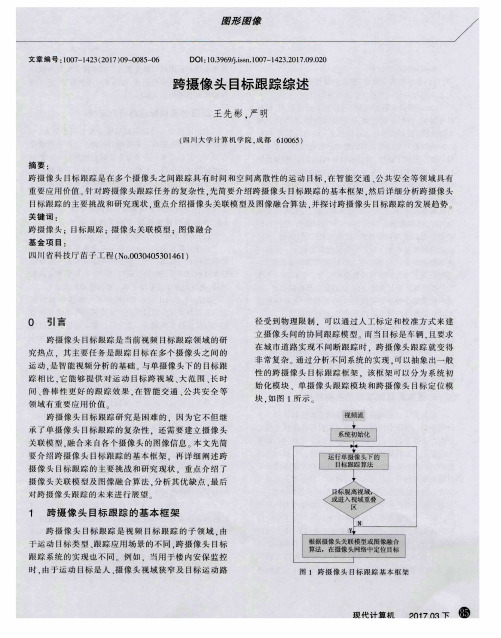
始化模块 、单摄像头跟踪模块 和跨摄像 头 目标 定位模
块. 如 图 1所 示
视频 流
跨 摄 像 头 目标 跟 踪 研 究 是 困难 的 .因 为 它 不 但 继 承 了单 摄 像 头 目标 跟 踪 的 复 杂 性 .还 需 要 建 立 摄 像 头
3 跨 摄 像 头 目标 跟踪 研 究现 状
当 前 跨 摄 像 头 目标 跟 踪 研 究 主 要 有 两 个 分 支 : 一
定 的 规 则 产 生 目标 在 当前 帧 中 的候 选 位 置 .常 见 的
是 非 重 叠 摄 像 头 跟踪 .是 指 两个 摄 像 头 之 间 的视 域 没
运 动模 型有 粒 子 滤 波 、 滑 动 窗 口和 均 值 漂 移 提 取 目标 特 征 有 两 种 方 法 .一 是 通 过 人 工 设 计 的算 法 获 得 目标 的点 、 几何形状 、 轮廓等形状特征 , 或灰 度 、 颜色、 纹理 、 梯 度 等 外 观 特 征 :二 是 利 用 机 器 学 习特 别 是 深 度 学 习 自动 获 取 边 缘 、 颜 色 等 底 层 特 征 和人 脸 、 轮 毂 等 高 层 抽 象 特 征 外 观模 型 分 为生 产模 型 和判 别 模 型 生 产 模 型 需 要 在 跟 踪 前 对 目标 外 观 ( 如形状 和纹理 ) 建模 . 然 后 在 运 动 模 型 基 于 上 一 帧 产 生 的候 选 位 置 框 中 .选 择 与 此 模 型 最 匹 配 的位 置 框 作 为 目标 在 当 前 帧 中 的位 置
对跨 摄 像 头 跟 踪 的未 来 进 行 的 基本 框 架
智能视觉监控中运动目标检测与行为识别方法

智能视觉监控中运动目标检测与行为识别方法智能视觉监控中运动目标检测与行为识别方法摘要:随着社会的发展和人口的增加,人们对公共安全的需求也越来越高。
传统的监控系统已经无法满足复杂的安全需求,因此面临升级和改进的问题。
智能视觉监控系统通过引入计算机视觉和模式识别等技术,能够实现自动检测、跟踪和识别运动目标的功能,进一步改进了监控系统的性能和效率。
本文将重点介绍智能视觉监控系统中的运动目标检测和行为识别方法。
首先,介绍运动目标检测的基本原理和现有的方法,包括帧间差分法、背景差法、光流法等。
然后,详细介绍了运动目标检测中的一些关键技术,如目标抠图、目标特征提取和目标跟踪等。
通过这些技术手段,可以实现对运动目标的准确检测和准确跟踪。
在运动目标检测的基础上,本文还介绍了行为识别的方法。
行为识别是指通过分析运动目标的动作和姿态等信息,识别目标的行为类型。
具体而言,行为识别包括行人检测、行人追踪、跌倒检测等多种任务。
本文将介绍这些任务的基本原理和常用的算法。
最后,本文对智能视觉监控系统中运动目标检测与行为识别方法的应用前景进行了展望。
智能视觉监控系统在安防、交通和城市管理等领域具有广阔的应用前景。
通过不断改进和创新,我们可以进一步提高智能视觉监控系统的性能和效率,为人们提供更加安全和便利的生活环境。
关键词:智能视觉监控,运动目标检测,行为识别,目标抠图,目标特征提取,目标跟踪,行人检测,行人追踪,跌倒检测,应用前景。
一、引言随着经济的快速发展和人口的增加,公共安全问题日益成为人们关注的焦点。
传统的人工监控系统无法满足复杂的安全需求,因此急需引入智能监控技术提升监控系统的性能和效率。
智能视觉监控系统是基于计算机视觉和模式识别技术的一种监控方式,可以自动检测、跟踪和识别运动目标,为安保人员提供支持和辅助功能。
二、运动目标检测方法运动目标检测是智能视觉监控系统的核心技术之一。
传统的运动目标检测方法包括帧间差分法、背景差法和光流法等。
视频监控系统中的运动目标检测与跟踪技术研究

视频监控系统中的运动目标检测与跟踪技术研究随着社会的进步和科技的发展,人们对视频监控系统的需求越来越高。
视频监控系统能够提供实时的监控和录像功能,是现代社会重要的安全保障措施之一。
其中,运动目标检测和跟踪技术是视频监控系统中的一大重要环节。
一、运动目标检测技术运动目标检测技术是指在视频监控系统中自动检测影像中运动的目标,为后续的跟踪和分析提供基础。
目前,运动目标检测技术主要分为两种方法:基于背景建模和基于运动目标的特征分析。
基于背景建模的运动目标检测技术是通过提取背景与前景之间的差异,检测运动目标。
它的优点在于对静止物体和背景的变化具有一定的鲁棒性。
但是,它对复杂背景的适应性较差,容易受光线变化和摄像机震动等因素的影响。
基于运动目标的特征分析技术则是通过对运动目标的形态和纹理特征进行分析,检测运动目标。
相比于背景建模技术,它更加灵活,适应性更强。
但是,也存在对光线变化和强噪声的敏感问题。
二、运动目标跟踪技术运动目标跟踪技术是指在运动目标检测的基础上,对目标进行跟踪的技术。
它有助于视频监控系统提高检测的准确率和稳定性,提供更加精细的目标分析和预测。
目前,运动目标跟踪技术主要有以下三种:1. 基于模板匹配的跟踪法:通过对目标在不同帧之间的位置、尺寸和朝向等特征进行匹配和拟合,来实现目标的跟踪。
优点在于算法简单,计算速度快。
但是,它对目标旋转、遮挡和光照等变化较敏感,容易出现漂移现象。
2. 基于区域分割的跟踪法:通过将视频图像分成不同的区域,并对运动目标所在区域进行跟踪。
它的优点在于对光照变化和背景干扰的鲁棒性强。
但是,它对运动目标的尺寸和形态变化较为敏感。
3. 基于特征点跟踪的跟踪法:通过对目标在不同帧之间的特征点进行匹配和跟踪,来实现目标的跟踪。
它的优点在于对目标旋转、遮挡和光照等变化较为鲁棒。
但是,它对目标形态变化和尺寸变化的适应性较差。
三、技术发展趋势随着深度学习技术的成熟和普及,运动目标检测和跟踪技术也迎来了新的发展机遇。
基于行人重识别和姿态估计的跨摄像头多目标跟踪算法研究

基于行人重识别和姿态预估的跨摄像头多目标跟踪算法探究关键词:跨摄像头多目标跟踪、行人重识别、姿态预估、目标匹配、目标识别一、引言随着智能监控系统的广泛应用,跨摄像头多目标跟踪技术越来越受到关注。
在实际监控中,由于监控区域的复杂性和行人数量的增加,单个摄像头往往不能满足监控的需要,需要多个摄像头进行联合监控。
跨摄像头多目标跟踪技术可以跟踪多个目标,包括目标位置、行动轨迹和运动状态等信息,提高了监控系统的精度和效率。
目前的跨摄像头多目标跟踪算法主要有多特征融合、多目标检测和多目标跟踪等方法。
但是在实际应用中,由于目标的相似性、目标特征的变化和摄像头视角的不同,这些方法往往无法满足实际需要。
因此,本文提出了一种基于行人重识别和姿态预估的跨摄像头多目标跟踪算法。
该算法结合了行人重识别和姿态预估,利用行人重识别进行跨摄像头目标匹配,利用姿态预估援助提高目标识别准确率,有较好的好用性和鲁棒性。
在试验中对不同场景下的视频进行了测试,结果表明该算法能够有效跟踪多个目标,在目标交叉、遮挡和姿态变化等状况下仍具有较好的跟踪效果。
二、相关探究目前的多目标跟踪算法主要分为两类:基于检测和基于跟踪。
基于检测的算法先使用目标检测器,再使用滤波器进行目标跟踪。
基于跟踪的算法则不使用目标检测器,直接使用前一帧的跟踪结果进行目标跟踪。
多目标跟踪算法中比较常用的方法有多特征融合和多目标检测。
多特征融合方法主要是将多个特征进行融合,以提高识别准确率和鲁棒性。
多目标检测方法则是利用先进的目标检测器进行目标检测,再依据检测结果进行跟踪。
当前的多目标跟踪探究中,行人重识别和姿态预估技术也得到了广泛的应用。
行人重识别技术主要是在多摄像头环境下,通过进修前后两帧中行人特征的变化来实现行人的身份跟踪。
姿态预估技术则是利用深度进修等技术,对目标在挪动过程中发生的形变进行猜测和修正,提高目标的识别准确率。
三、算法设计本文提出的跨摄像头多目标跟踪算法主要分为三步:预处理、目标匹配和目标跟踪。
《2024年智能监控系统中运动目标的检测与跟踪》范文

《智能监控系统中运动目标的检测与跟踪》篇一一、引言随着科技的不断进步,智能监控系统已经广泛应用于各个领域,如安防、交通、医疗等。
其中,运动目标的检测与跟踪是智能监控系统的核心任务之一。
本文将介绍智能监控系统中运动目标检测与跟踪的原理、方法及应用,并分析其重要性和挑战。
二、运动目标检测与跟踪的原理运动目标检测与跟踪是利用图像处理和计算机视觉技术,从监控视频中提取出运动目标,并对其进行连续跟踪的过程。
其基本原理包括目标检测、特征提取、目标匹配与跟踪等步骤。
1. 目标检测目标检测是运动目标检测与跟踪的第一步,其主要任务是在视频帧中检测出运动的目标。
常见的目标检测方法包括基于背景减除法、光流法、帧间差分法等。
其中,背景减除法通过比较当前帧与背景帧的差异来检测运动目标;光流法利用光流矢量来计算像素点的运动,从而检测出运动目标;帧间差分法通过比较相邻两帧的差异来检测出运动目标。
2. 特征提取特征提取是运动目标检测与跟踪的关键步骤,其主要任务是从检测出的运动目标中提取出有效的特征。
常见的特征包括颜色、形状、纹理等。
通过提取有效的特征,可以提高目标匹配的准确性和稳定性。
3. 目标匹配与跟踪目标匹配与跟踪是利用提取出的特征,对运动目标进行连续跟踪的过程。
常见的目标匹配方法包括基于模板匹配、基于特征点匹配等。
其中,模板匹配法通过在视频帧中搜索与模板相似的区域来跟踪目标;特征点匹配法则通过提取出目标的特征点,并利用这些特征点进行连续跟踪。
三、运动目标检测与跟踪的方法目前,运动目标检测与跟踪的方法主要包括基于深度学习的方法和传统方法。
其中,基于深度学习的方法在近年来得到了广泛的应用,其准确性和稳定性较高。
常见的基于深度学习的方法包括基于卷积神经网络(CNN)的目标检测与跟踪、基于循环神经网络(RNN)的跟踪等。
传统方法则包括背景减除法、光流法、帧间差分法等。
四、应用场景智能监控系统中运动目标的检测与跟踪具有广泛的应用场景。
运动的目标识别与跟踪简述

运动的目标识别与跟踪简述运动的目标识别与跟踪是指利用计算机视觉和图像处理技术对视频中的运动目标进行识别和跟踪。
在现代社会中,运动目标识别与跟踪技术已经得到了广泛的应用,包括智能监控系统、自动驾驶汽车、机器人导航等领域。
本文将对运动的目标识别与跟踪技术进行简要介绍,包括其基本原理、关键技术和应用领域。
一、目标识别与跟踪的基本原理运动的目标识别与跟踪是通过对视频序列中的图像进行处理和分析,从而实现对运动目标的识别和跟踪。
其基本原理可以简要概括如下:1. 图像采集:首先需要使用摄像机等设备对视频序列中的图像进行采集,并将其转换为数字信号。
2. 运动目标检测:利用计算机视觉和图像处理技术对视频序列中的图像进行分析和处理,从而实现对运动目标的检测和定位。
常用的检测算法包括背景建模、运动检测和物体识别等。
3. 目标跟踪:一旦运动目标被检测出来,就需要对其进行跟踪,即在连续的图像帧中跟踪目标的运动轨迹。
常用的跟踪算法包括卡尔曼滤波、粒子滤波和相关滤波等。
4. 数据关联:对于多个运动目标,需要进行数据关联,即将它们在连续的图像帧中进行匹配和跟踪。
通过以上步骤,可以实现对视频序列中的运动目标进行准确的识别和跟踪,为后续的应用提供可靠的基础数据。
二、目标识别与跟踪的关键技术运动的目标识别与跟踪涉及多个关键技术,包括图像处理、模式识别、机器学习等。
下面对其中的一些关键技术进行简要介绍:1. 图像处理:图像处理是目标识别与跟踪的基础,包括图像的预处理、特征提取和图像分割等。
通过对图像进行处理和分析,可以提取出目标的特征信息,为后续的目标识别和跟踪提供数据支持。
2. 特征提取:特征提取是目标识别与跟踪的关键步骤,包括颜色特征、纹理特征、形状特征等。
通过对目标的特征进行提取和描述,可以实现对目标的精确识别和跟踪。
3. 目标识别算法:目标识别算法是实现目标识别与跟踪的核心技术,包括支持向量机、决策树、神经网络等。
通过对目标进行特征匹配和分类,可以实现对目标的准确识别和跟踪。
《2024年智能监控系统中运动目标的检测与跟踪》范文

《智能监控系统中运动目标的检测与跟踪》篇一一、引言随着科技的不断进步,智能监控系统在安全、交通、军事等领域得到了广泛应用。
其中,运动目标的检测与跟踪是智能监控系统的核心技术之一。
本文将详细介绍智能监控系统中运动目标的检测与跟踪技术,包括其基本原理、方法、应用场景及发展趋势。
二、运动目标检测的基本原理与方法1. 基本原理运动目标检测是通过对视频图像序列进行分析,提取出运动目标的过程。
其基本原理包括背景建模、图像预处理、特征提取和目标分类等步骤。
在智能监控系统中,通过对监控场景的背景进行建模,将运动目标与背景进行分离,从而实现目标的检测。
2. 常用方法(1)帧间差分法:通过比较相邻两帧图像的差异,提取出运动目标。
该方法简单易行,但对光照变化和阴影较为敏感。
(2)光流法:基于光流场分析的原理,通过计算像素点在时间上的变化速度来检测运动目标。
该方法具有较好的实时性,但计算复杂度较高。
(3)深度学习方法:利用深度神经网络对图像进行学习和训练,实现对运动目标的检测和识别。
该方法具有较高的准确性和鲁棒性,是当前研究的热点。
三、运动目标跟踪的技术与方法1. 基本原理运动目标跟踪是在运动目标检测的基础上,对目标进行持续跟踪和轨迹分析的过程。
其基本原理包括目标特征提取、匹配与识别、轨迹预测等步骤。
通过提取目标的特征信息,与已知的目标模板进行匹配和识别,实现对目标的持续跟踪。
2. 常用方法(1)基于特征匹配的方法:通过提取目标的特征信息,与已知的目标模板进行匹配和识别,实现目标的跟踪。
该方法具有较好的稳定性和鲁棒性,但易受光照变化和遮挡等因素的影响。
(2)基于深度学习的方法:利用深度神经网络对目标进行学习和训练,实现对目标的识别和跟踪。
该方法具有较高的准确性和实时性,是当前研究的热点。
其中,基于卷积神经网络的深度学习算法在目标跟踪中得到了广泛应用。
四、应用场景及发展趋势1. 应用场景智能监控系统中的运动目标检测与跟踪技术广泛应用于安全监控、交通管理、军事侦察等领域。
视频监控系统中的运动目标检测与追踪技术研究
视频监控系统中的运动目标检测与追踪技术研究随着技术的发展和经济的进步,视频监控系统已经成为我们生活中不可或缺的一部分。
不管是在公共场所,商场,工厂还是住宅区,视频监控系统都被广泛应用。
而其中的运动目标检测与追踪技术,则是视频监控系统中最为关键的一环。
一、运动目标检测技术运动目标检测技术是视频监控系统中最为基础的技术之一。
它主要的作用是检测到摄像头画面中的运动目标,并从背景中分离出来,作为下一步运动目标追踪的依据。
在运动目标检测技术中,最常用的方法是基于背景的差分法。
差分法基于前景与背景之间的差异性,通过对相邻帧图像进行比较,发现像素值变化的位置,从而检测到运动目标。
此外,还有一些基于纹理和形状特征的运动目标检测方法,如基于纹理和角点的特征点匹配法,基于感兴趣区域的范围搜索法,基于运动能量的运动目标检测法等等。
二、运动目标追踪技术运动目标追踪技术接着运动目标检测,通过追踪检测到的运动目标,实现对其位置、速度、方向等信息的跟踪记录。
常用的运动目标追踪技术有卡尔曼滤波法、粒子滤波法和组合跟踪法等。
其中,卡尔曼滤波法是最为经典和广泛应用的一种方法。
它基于状态估计和观测值之间的关系,通过实时不断地调整估计结果,来预测并跟踪目标的运动轨迹。
卡尔曼滤波法对目标的运动轨迹预测具有一定的鲁棒性和准确性,但其对背景噪声的抵抗能力相对较弱。
粒子滤波法采用的则是蒙特卡罗方法。
通过对观测值建立似然函数,根据每个观测值的概率来为每个粒子重新分配概率权值,从而实现目标的跟踪。
与卡尔曼滤波相比,粒子滤波法对非线性系统和非高斯噪声具有更好的适用性,但运算复杂度相对较高。
三、运动目标检测与追踪技术的应用运动目标检测与追踪技术在视频监控系统中有着广泛的应用前景。
首先,它可以帮助人们更加高效地监控公共场所和商业场所,尤其是大型场所。
通过设置运动目标检测与追踪功能,可以实现对潜在威胁和异常情况的及时发现和响应,同时还可以帮助管理人员对场所内的人流量、活动轨迹等进行数据化分析和研究,以进一步提高招募和销售的效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
is introduced into this algorithm to remove the disturbance and cavities in target extraction.Lastly,the work presents kind of target matching strategy with statistical histogram,and it gives
c工,y,={:莩{工x,,yy,)芒∈xX。s
(4)
3.2运动目标匹配
肘就是形态学滤波的结果。这个步骤主要用来去 在运动目标特征匹配过程中,单纯的差值法作为 匹配准则不是很稳定。比如目标进入阴影的前后,同 一目标的直方图会发生整体的左右移动,而差值法则 会将整体移动带来的差异大幅扩大。事实上,整体移 动后,直方图仍然保持原来的走势,这个走势是不变 量,可以作为待匹配的特征。因此本文提出一种引入 平移因子的直方图匹配策略,有效地解决了以上问题, 该匹配策略可以归纳为
式中,.表示当前罔像,B为背景图像,背景更新的 目标就是由当前图像,.与当前背景0。来估计下一时刻
的背景图像B;…D。是由帧I'uJ差法和形态学滤波后估
计出的运动目标一值罔像,用来刻画当前时刻图像发生 剧烈变化的位置,而函数r(D。【』,¨)则是当D。(』,y)值
万方数据
模式识别与仿真
巳皇!!皇!翼旦呈璺旦g旦!!!里旦垦旦g墨!盟垡!璺!!鱼旦
重要的方向,监控网络化所起到的作用不只是简单地多 增加几个摄像头,而摄像头之间的联系显得非常重要。 在未来的智能监控网络中将会根据实际情况采用不同 的摄像机,它们的视场有可能交织在一起,也可能彼此 的视场里没有重复区域。跨摄像头的运动目标跟踪不 仅有效地扩大了监控的视野,同时也能对运动目标在整 个监控区域内的行为有着更加清晰的把握。文献【1】详 细介绍了摄像头之间有重叠视野的运动目标不同视点 之间的对应问题并取得了良好的性能,然而该方法对于 摄像头视野无重叠区域是不适用的。而本文介绍的跨
-F
喈
系数,ff:I以上数据计算出的口。(』,Y)即为自适应权值。 如果Dt(J,y)值为1,则r(D^(』,』)j值为0,即口^(J,J)
‘’函
图1
民li盼-田, 随心-j
跨摄像机运动目标跟踪框架
值为0,表示此处可能存在目标,因而背景暂时不更新, 直到目标不再运动或离开此处时再更新此处背景,这样 可以对背景的移入移出的变化有很强的适应能力;’’值 D。(z,y)为0时,认为此刻两帧图像没有剧烈变化,此时 即可更新背景,用来适应一些渐变过程,而自适应权值 吼(z,Y)的引入则可使背景更新更加平滑。
跨摄像头运动目标检测与识别
梅江元,司玉林,高会军
(哈尔滨工业大学智能控制与系统研究所,黑龙江哈尔滨150080)
摘要:跨摄像头运动lj标跟踪足f|前智能I删络监控的一个重点研究力‘阳。本文白‘尢提出J,一种局郑背景更新法,有效地解决了背景 更新的稳定性与,F滑性等问题;其次,本文提}H r一种基于自适应阈值的运动目标提取方‘法,同时通过形态学滤波有效地去除 了提取门标时的噪声干扰与空洞问题;最后,文章提出了1种基于YC 时加入rj|,-移因子,在测试集合中得到了非常好的匹配性能。 关键词:跨摄像头;运动目标枪测;直方图l,‘配;运动11标识别 中图分类号:TN919.7,TP391.4 文献标识码:A 文章编号:1003
当前背景在某一区域相关性很大时,表示这个罔像是 背景的可能性很大,y。(J,y)为一个较大的值;而当丰u 关性较小时,表明此处发生了突变.运动目标出现的几 率很大,因而n(x,y)较小,能充分满足以j:的要求。 注意此处计算中B.中最小像素值必须取为1,否则会 出现奇异点。 在得到二值化图像后,本文采J}j了形态学滤波法进
(Research
Institute of Intelligent Control and Systems,Harbin
a
Institute ofTechnology,Harbin 150008 China)
a
Abstract:Multi—camera tracking is
based
on
key research direction of intelligent network monitoring.Firstly,this paper proposes
%(r)=丑1%∞一%仗刊)七=%,to+t,…-,25%
k
k
%(r)=丑1%∞一%@+叫)七=%,zo+l,...,25吒(6)
k
D=njrl(I让≥(,)+y%∞+(1—p—’,)£b(砌f=q±1,一j±毛
式中日r1日G1日cl与日y2日G2日c,2分别代表第一 个和第二个目标YC。C,分量的直方图,f为平移因子, %为平移的限度,一般是个较小的整数,而Ⅳ与y则分 别代表三个分量在最后匹配过程中的加权。如果两个 直方图走势相似,而出现整体的左右移动时,平移因子f 的引入,可以保证两个直方图仍然能对应地很好,距离 D仍然很小,因而比普通的差值法有更好的鲁棒性。 在运动目标跟踪过程中,通过计算运动目标的移动 轨迹,可以估计该目标出现在每一个摄像头的序列关 系。该直方图匹配法配合时空信息,如迁移时间、速度、 人口区域、出口区域、路线等等,即可实现跨摄像头的 动态目标的全程跟踪。
收稿日期:2
00 7—0 3-1 6
万方数据
“自动化技术与应用”2 011年第30卷第11期
———————————————————————一Patle,n
像头运动目标的匹配。
模式识另|J与t:8真
Recognit Jon and Si
m
Jlation——一——
为0时该像素与J割围离得最近的D。(J,y)为l的像素的 距离,而R丧示图像长宽中较小的仳,,值为一个口『调
《自动化技术与应用》2011年第30卷第ll期
行滤波。首先提取所有的连通区域X,通过求取每个连 通区域的面积从中选取连通区域像素数量大于某一阈 值的大连通区域的集合XB
M
本文中将三个通道灰度分布0—255的区间分为了 25个子区间进行统计,如果子区间过少则起不到区分的 效果,子区间过多则会对光强等因素敏感。经过测试, 发现区间数取20。30比较合适。统计得到的灰度分布 即为运动目标的直方图特征。
的权值,因而此交接处更新的背景往往不是很平滑。因
一。={:扩if 1I,。k。(。x,,,y,)-一口B。k。(,x,,y,,)i;>,y^。。(。x,,,y;
(:,
A表示当前图像,.与当前背景图像口。的差分的二 值化图像,而此处起关键效果的就是自适应闯值 y。(z,,)的选择。由于有些目标与背景的相似性很大, 比如运动目标在阴影中运动,这样的情况下,希望 y。(X,Y)越小越好;而对于一般的背景,由于光照或噪声 引起了微小的变化,则希望此区域y。(T.y)越大越好,这 样不易引进噪声。因此n可以被这样定义为
摄像头图像序列的运动跟踪正是应对没有重复视野的 运动目标检测与匹配问题。 图1所示是跨摄像头运动目标跟踪的一个框架图, 多台摄像机分别对自己视场中的目标进行检测提取并 跟踪,当某一摄像头视场中的目标离开视场时,就会根 据该目标的时空信息(比如出场区域,路线,速度)通知 相关摄像机,被通知的摄像机从进入视场的候选目标 中进行识别匹配,继续对该目标的跟踪。在这个框架 下除了对运动目标简单的跟踪,跨摄像头的运动目标 匹配就显得尤为重要,然而运动目标的匹配离不开非 常准确稳定的运动目标分割提取,否则会大大降低识 别的可信度。因此,本文主要致力于解决两个问题,一 是复杂环境下的运动目标的准确分割,另一个是跨摄
a
very good matching performance.
Key words:multiple separated cameras;moving targets detection;histogram matching;moving targets recognition
1
引言
在智能监控系统中,网络化监控已经成为一个非常
此式是用相戈性来求取闻值n(』,Y),式中m,”
nt,.,,:a冉冉。。,f—Inf{} 箍1 1。,,
表示模板大小,A为一个可调系数。如果当前图像和
…
、l 7
J
a^(J,j’):(r(D^(』,y)),科 IBk+l(x,y)=口t(x,y),t(x,)。)+(1一口^(』,J)】Bk(T,)’)d updating,it effectively solves the problems of time—delay and instability.Secondly,a moving
object
extraction method with adaptive threshold is put forward in this work,and at the same time,morphological filtering
3.1运动目标特征提取
的角度不一致,这就使得基于结构特征的匹配方法往往 会失效。本文所使用的运动目标匹配方法是基于颜色 直方图的匹配方法,该方法对于全局信息的获取与匹配 有着非常好的效果。 在预处理过程中,首先将待匹配目标周围背景去 除,然后将目标合理地划分成适当的几个区域,比如对 于行人目标可以划分成头、上半身、下半身三个区域。 可以发现,同一目标即使观察角度不一样,状态各异,但 是每个区域的颜色特征一般都是非常相似的。文献【3】 介绍了对RGB三个通道分别进行直方图匹配的方法, 在光照条件良好,色彩对比较高的条件下都取得了很好 的效果,然而在光照条件不是很好的情况,颜色的对比 度往往会很低,该方法往往失去了适用性,因此,为了能 适应这种低对比度环境下的运动目标跟踪,在接下来本 文采用一种基于YC。C,分量的直方图匹配。下式为 RGB分量转换为yc.C分量的转换公式: