一种运动背景下移动目标的检测方法
mht追踪方法
MHT追踪方法引言MHT(Multiple Hypothesis Tracking,多假设跟踪)是一种用于目标追踪的方法。
目标追踪是计算机视觉领域的一个重要问题,它涉及在视频序列中检测和跟踪移动目标。
MHT方法通过创建多个可能的目标轨迹假设,并使用观测数据对这些假设进行验证和更新,从而实现目标追踪。
MHT的基本原理MHT方法通过以下步骤实现目标追踪:1. 数据预处理在目标追踪之前,需要对输入的视频序列进行预处理。
预处理包括帧差法、背景建模等操作,以便从视频中提取出目标区域。
2. 目标检测在目标追踪中,首先需要对每一帧进行目标检测,以获得目标的位置和大小信息。
常用的目标检测算法包括Haar特征、HOG特征、卷积神经网络等。
3. 假设生成假设生成是MHT方法的关键步骤。
对于每一帧的目标检测结果,MHT方法生成多个可能的目标轨迹假设。
每个假设由当前帧的目标位置和前一帧的假设组成。
4. 假设验证在假设验证中,MHT方法使用观测数据和先验信息对每个假设进行验证。
通过计算目标在各个假设上的后验概率,选择合适的假设。
5. 假设更新在假设更新中,MHT方法根据观测数据对每个假设进行更新。
通过最大似然估计或贝叶斯滤波等方法,更新目标在各个假设上的状态和不确定度。
6. 轨迹管理在轨迹管理中,MHT方法对追踪轨迹进行管理和组合。
通过合并重叠的轨迹、删除不可靠的轨迹等操作,实现对目标的有效追踪。
MHT方法的优势和应用MHT方法在目标追踪领域具有以下优势:1. 鲁棒性MHT方法能够处理目标遮挡、目标形变和观测噪声等问题,具有较好的鲁棒性和准确性。
2. 多目标跟踪MHT方法能够同时追踪多个目标,在多目标场景下具有较好的追踪效果。
3. 运动模型建模MHT方法通过建立目标的运动模型,能够预测目标在未来的位置,提高目标追踪的准确性。
MHT方法在许多领域都有广泛的应用,包括视频监控、自动驾驶、智能机器人等。
通过对移动目标的准确追踪,提供了更多的信息用于实时决策和行为规划。
一种改进的运动目标检测方法
Ke o d : t no jc d tcin f medf rn emeh d b c g o n u tat n yw r s moi bet eet , a i ee c to ,a k ru ds b rci o o r f o
引 言
运 动 目标 的 检测 在 国 民经济 、 事领 域 和工 程 军
关 键 词 : 动 检 测 , 差 法 , 景 差 分 运 帧 背 中 图分 类 号 : 7 11 TP 5 . 文献标识码 : A
An I r v d Meh d f rM o i gOb t tcin mp o e t o o vn j c e t e De o
N I G uiy n N H - ig
( h n a g Po tc ncC le e S ey n 1 0 5 Chn ) S ey n #- h i olg , h n a g 1 0 4 , ia e
Ab ta t Th e e t n meh d o vn b e t n t i a e s b s d o h y a c t rs od sr c : e d tc i t o fmo ig o jc s i hs p p r i a e n t e d n mi h e h l o
b n r ma e h o g o i i g t e f a i e e c n a k r u d d fe e c e h d,a d fn l h i a y i g ,t r u h c mb n n h r me d f r n e a d b c g o n if r n e m t o f n ial t e y m o i g t r e s a e d t c e . i e h d i r g a v n a g t r e e t d Th s m t o s p o r mme n e t d b s d o h d a d t s e a e n t e VC+ + p a f r ,a d l to m n
基于光流估计摄像机运动下红外小目标检测算法
基于光流估计摄像机运动下红外小目标检测算法单巍; 陈得宝【期刊名称】《《淮北师范大学学报(自然科学版)》》【年(卷),期】2019(040)004【总页数】6页(P25-30)【关键词】光流; 光流柱状图; Harris角点; 红外小目标; 动态背景; 目标检测【作者】单巍; 陈得宝【作者单位】淮北师范大学物理与电子信息学院安徽淮北 235000【正文语种】中文【中图分类】TP3910 引言复杂背景下运动小目标的检测一直是红外预警系统的关键技术之一[1-2]. 由于探测距离远,目标在视场上仅表现为几个孤立的亮斑,无法从目标的形状和结构来探测目标,能够利用的仅仅是目标与背景之间的微小差异以及目标的运动特征. 静态背景下运动目标检测技术相对成熟,主要有帧间差分法[3]、背景差分法[4]和光流法[5]. 而当摄像机追踪目标发生转动时,背景也随之运动,目标的运动信息往往淹没在动态背景中[6],给目标的提取带来困难. 处理方法主要有基于运动补偿的方法[7]和基于光流的方法[8]. 基于运动补偿的方法是对背景运动进行估计,将动态背景转化为静态背景,再使用帧差法提取前景目标.该方法的有效性取决于背景运动补偿的准确性[7],且帧差法一般无法获取完整的目标. 光流法中的Horn-Schunck 光流(HS光流)能够在动态背景下获取完整的目标[9],但计算量大,对噪声敏感,难以直接用于运动目标的实时检测;Lucas-Kanade光流(LK光流)只计算稀疏点光流[10],虽然提高运算速度,但无法获得完整的运动目标.本文以动态地空背景的运动小目标红外图像序列为研究对象,结合2类光流算法的优点,提出一种新的动态背景运动小目标检测方法,实现动态地空背景下的运动小目标检测. 本方法利用LK光流运算速度快的特点,计算图像Harris 角点处2 帧之间的LK 光流,通过光流柱状图快速获取背景的运动信息.然后根据背景的运动信息进行背景运动补偿,将2帧图像进行背景配准[11],将动态背景转化为静态背景.最后利用HS光流在静态背景下效果较好的特点,计算运动补偿后的HS光流,通过自适应的阈值对光流场进行分割,得到最终的检测结果.1 动态背景补偿光流是三维空间速度矢量在二维平面上的速度场投影. 传统光流方法[9-10]很难直接应用于动态背景的目标检测,因此考虑将动态背景转化为静态背景再进行处理,这就要将图像进行配准.Lucas-Kanade光流算法[10]的思路是假设以p点为中心的一个小区域内各点光流方向相同,区域中各点被赋予不同的权值,再以p点为中心的一个小区域Ω内对光流场施加局部约束条件:式(1)中W( )x,y 为窗函数,代表区域内各点权值,距离区域中心越近权值越大.I 是图像灰度,v 是p点的光流矢量,It 是图像灰度对时间的导数. 利用最小二乘法解得:式中:式(5)表明,W 为一对角矩阵,其主对角线上的元素为,其他元素则为0.基于梯度的光流基本约束方程为式中:分别代表图像灰度相对于x,y,t 的偏导,代表x,y 方向上的光流.本文将Harris 角点[12]作为LK 光流算法中的特征点. 角点是二维图像上亮度变化剧烈的点或图像边缘曲线上曲率极大值的点. 这些点数量非常少,但却保留图像最重要特征信息,能够极大地降低信息的数据量,因此被广泛应用于背景消减[13]和光流计算方面.Harris 角点检测算法是一种基于信号的点特征提取算子,其思路是用一个高斯窗或矩形窗在图像上向任意方向移动微小位移,计算其灰度变化量:式中:ωp,q 是降噪平滑窗口为偏移坐标,Ix,y 为图像中点( )x,y 的像素值,M 为对称矩阵,Ix 和Iy分别代表图像像素在水平方向和垂直方向的一阶灰度梯度.角点响应函数定义为式中:det(M)为行列式值,tr(M)为矩阵M 的迹,k 为经验值,Harris推荐的取值范围为0.04~0.06.通过设定阈值T 消除噪声,选取R ≥T 的点,同时采用非极大值抑制确定角点. 实际实验分析表明,当阈值T 是响应函数最大值Rmax 的0.01倍时,具备较好的噪声抑制性能.通过Harris 角点处的LK 光流,可以获得图像中特征点的运动规律. 因为处理的是小目标的检测问题,所以目标的角点数量远远小于背景的角点数量. 背景运动是由摄像机运动引起的,背景角点光流应趋于一致. 针对这个特点,可以建立光流柱状图对角点LK光流进行分析,光流柱状图表示具有某一速度的像素个数多少,其最大值通常代表背景的运动速度. 利用背景的运动信息实现运动补偿,将2幅图像配准[14],便实现从动态背景到静态背景的转换. 目标运动与背景运动相互独立,在背景静止的情况下目标必然运动,此时再用HS光流算法计算便可得到目标光流. HS算法[9]是在光流约束方程的基础上,对整幅图像施加平滑性约束,即图像上任一点的光流都不是独立的,光流在整幅图像内平滑变化. 其表达式为式中:Ixu+Iyv+It=0 为光流约束方程,为平滑约束项,λ 为权重系数.利用Euler方程和迭代算法可以得到光流的递归解:其中:k 为循环数,u(0)和v(0)为初值,可以取0. uˉ和vˉ为局部均值,λ 根据导数求取精度确定,本文取λ=25.最后用合适的阈值对HS光流场进行分割,即可得到目标. 本文采用的是自适应阈值分割[15],自适应阈值T由式(13)求出:其中:m 为光流场矢量长度均值,σ 为矢量长度标准差,k 为经验值,取值范围一般在10~20之间,本文取k=16.综上所述,本算法的流程如图1所示.图1 算法流程图2 实验结果本文选用实地录取的地空背景红外小目标图像进行仿真实验,图2为某序列图像中的相邻2帧,目标实际运动方向为从右到左,摄像机追踪目标从右向左转动,因此背景从左向右运动.图2 序列图像相邻2帧使用传统HS算法直接计算2帧之间的光流,λ 取25,迭代次数100,结果如图3所示. 目标光流被淹没在背景运动产生的光流之中,很难找到合适阈值对光流场图像进行分割. 此步骤在CPU英特尔第3代酷睿***************双核,4 GB 内存,操作系统Windows10 专业版64 位,MATLAB R2016b 环境下耗时约为0.68 s,难以做到实时且无法检测出目标.图3 直接计算HS光流结果按照本文方法,提取第K帧的Harris角点,并计算角点的LK光流,结果如图4所示. 建立光流柱状图对得到的x方向上的角点LK光流进行分析,得到图5.图4 角点的LK光流图5 角点LK光流柱状图(x方向)由图5可以看出,大部分角点x方向的帧间位移集中在1.6个像素附近,帧间位移为1.5、1.6、1.7的角点约占总角点数的28%、40%、12%,这3部分角点占总角点数的80%,该部分表征整个图像中占绝大多数的背景相对于摄像机的运动. 结合图4(b)可以发现,位移为0.6的角点是目标,其余位移偏离1.6较大的角点所占比例很少,可以认为是由噪声引起的计算误差.根据光流柱状图的性质,其最大值往往对应背景的运动速度,因此可以认为,由摄像机引起的背景运动速度为1.6个像素每帧. 同理对y方向的帧间位移进行计算,获得完整的背景运动信息. 背景配准后的图像及光流场分别如图6及图7所示.由于目标检测的目的是确定目标的位置,而不是要得到精确的目标运动矢量,因此在计算HS光流时可以选择较低的迭代次数,以提高运算速度. 加之动态背景已经转化为静态背景,背景光流基本为零,这更有助于大大降低计算过程中的迭代次数. 实验中图7的迭代次数为5,λ 取25,计算结果已经能够达到凸显目标光流的效果. 在相同平台下,HS光流计算耗时0.18 s,耗时仅为传统方法[6]迭代次数为100时的26%,大大提高算法的实时性.图6 运动补偿后图像图7 运动补偿后计算的光流场对比图3 可以发现,光流场中大部分背景运动都被抑制,突出显示目标运动产生的光流. 按照式(13)给出的自适应阈值对图7进行分割,分割后的图像如图8(a)所示,可以发现,目标存在一些断点,使用形态学方法将断点进行连通,得到最终的处理结果如图8(b)所示.图8 检测结果因为红外预警系统一般作为雷达的补盲设备,主要应用范围是雷达探测的低空近地盲区,图像中背景角点数量远高于小目标数量,所以其角点LK光流柱状图始终能够反映背景相对于摄像机的运动. 由此可见,在多个小目标的情况下本文提出的方法依然是有效的.3 结语本文针对动态地空背景下的红外序列图像运动小目标检测问题,提出一种基于光流估计的自适应门限红外小目标检测方法. 该算法的核心是提取第K帧的Harris角点,计算角点处第K帧与第K+1帧的LK光流. 然后通过光流柱状图确定背景的运动状态,对背景运动进行补偿,将动态背景转化为静态背景.最后用补偿后的图像与第K+1帧进行HS光流计算,通过自适应阈值分割光流场图像,得到最终的检测结果. 实验结果表明,本算法能在摄像机运动的情况下实现地空背景运动红外小目标检测,且实验中只计算角点处的LK光流,HS光流迭代次数很少,算法的速度有很大提高.参考文献:【相关文献】[1]解婷,陈忠,马荣毅. 一种基于PGF、BEMD 和局部逆熵的新型红外小目标检测方法[J].红外与毫米波学报,2017,36(1):92-101.[2]朱文杰,王广龙,田杰,等. 空时自适应混合高斯模型复杂背景运动目标检测[J]. 北京理工大学学报,2018,38(2):165-172.[3]沈瑜,王新新. 基于背景减法和帧间差分法的视频运动目标检测方法[J]. 自动化与仪器仪表,2017,37(4):122-124.[4]宋志勤,路锦正,聂诗良. 改进的时空背景差分目标检测[J]. 光电工程,2016,43(2):27-32.[5]谢存,孔祥维. 利用光流预测Snakes模型初期轮廓的动态图象轮廓追迹方法[J]. 中国图象图形学报,2018,5(8):666-669.[6]闫钧华,段贺,艾淑芳,等. 旋转复杂背景中红外运动小目标实时检测[J]. 电子科技大学学报,2017,46(5):697-702.[7]于红绯,刘威,袁淮,等. 基于子块运动补偿的运动目标检测[J]. 电子学报,2017,45(1):173-180.[8]刘洪彬,常发亮. 权重系数自适应光流法运动目标检测[J]. 光学精密工程,2016,24(2):460-468.[9]HORN B K P,SCHUNCK B G.Determining optical flow[J]. Artificial Intelligence,1981,17(1/3):185-203.[10]LUCAS B D,KANADE T.An iterative image registration technique with an application to stereo vision(DARPA)[J]. Nutrient Cycling in Agroecosystems,1981,83(1):13-26.[11]李静,杨涛,潘泉,等. 基于不变特征的运动视频序列自动配准算法[J]. 中国图象图形学报,2018,13(2):335-344.[12]张立亭,黄晓浪,鹿琳琳,等. 基于灰度差分与模板的Harris角点检测快速算法[J]. 仪器仪表学报,2018,39(2):218-224.[13]辛浩,李玲玲. 基于帧间差分与背景消减的视频摘要算法研究[J]. 淮北师范大学学报(自然科学版),2017,38(2):64-68.[14]唐佳林,郑杰锋,李熙莹,等. 基于特征匹配与运动补偿的视频稳像算法[J]. 计算机应用研究,2018,35(2):608-610.[15]唐红梅,吴士婧,郭迎春,等. 自适应阈值分割与局部背景线索结合的显著性检测[J]. 电子与信息学报,2017,39(7):1592-1598.。
《基于混合高斯模型的运动目标检测技术研究》
《基于混合高斯模型的运动目标检测技术研究》一、引言运动目标检测作为计算机视觉和智能监控系统的重要研究领域,已经广泛应用于安全监控、人机交互和智能交通等领域。
基于混合高斯模型(Gaussian Mixture Model,GMM)的运动目标检测技术是当前的研究热点。
该技术利用图像序列中的统计信息对运动目标进行建模和检测,对于提高运动目标检测的准确性和实时性具有重要意义。
本文将详细探讨基于混合高斯模型的运动目标检测技术的相关研究内容。
二、混合高斯模型的基本原理混合高斯模型是一种概率统计模型,它将多个高斯分布模型按照一定的权重组合起来,用于描述一个动态系统的状态。
在运动目标检测中,我们将视频图像序列的每一个像素值视为一个动态变化的时间序列,使用混合高斯模型对其进行建模。
每个高斯模型描述了一个特定的分布情况,并按照不同的权重组成整体的混合模型。
三、基于混合高斯模型的运动目标检测技术基于混合高斯模型的运动目标检测技术主要包括背景建模、前景提取和目标跟踪等步骤。
首先,通过训练阶段建立每个像素的高斯分布模型;其次,利用该模型将视频中的像素进行分类,确定哪些像素属于背景、哪些属于前景;最后,利用合适的目标跟踪算法实现运动目标的追踪和轨迹分析。
四、研究现状及问题分析尽管基于混合高斯模型的运动目标检测技术在多个领域已经得到了广泛应用,但仍存在一些问题和挑战。
首先,对于复杂场景下的背景建模问题,如何准确地将背景和前景进行分离是一个难题。
其次,在目标跟踪过程中,由于光照变化、阴影遮挡等因素的影响,容易出现误检和漏检的问题。
此外,如何进一步提高算法的实时性和准确性也是该领域亟待解决的问题。
五、技术改进与优化策略针对上述问题,本文提出以下技术改进与优化策略:1. 优化背景建模算法:通过引入更多的高斯分布模型来描述复杂的背景变化,提高背景建模的准确性。
同时,采用动态调整高斯模型的权重和方差的方法,以适应不同场景下的背景变化。
像素偏移追踪算法
像素偏移追踪算法1.引言1.1 概述像素偏移追踪算法是一种用于视频处理和计算机视觉的高级技术。
它通过在视频序列中检测像素的移动和变化,以定位目标对象并跟踪其运动轨迹。
该算法结合了图像处理和机器学习的方法,能够在各种环境条件下实现准确的目标追踪。
在传统的目标追踪算法中,常常面临光照变化、背景干扰等挑战,导致追踪失效或错误。
而像素偏移追踪算法通过分析像素之间的关系,可以更加准确地确定目标的位置和运动路径。
该算法采用了基于对象特征的自适应滤波器,能够自动适应目标的变化,并及时更新追踪模型,从而提高追踪的鲁棒性和准确性。
像素偏移追踪算法的应用非常广泛。
在监控系统中,该算法可以用于目标的实时追踪和监测,帮助警方及时发现异常行为并采取相应措施。
在无人驾驶领域,该算法可以用于车辆识别和跟踪,实现智能驾驶的功能。
此外,像素偏移追踪算法还可以应用于视频编辑、虚拟现实等领域,为多媒体技术提供基础支持。
本篇文章将详细介绍像素偏移追踪算法的基本原理和应用领域。
首先,我们将介绍算法的核心思想和关键步骤,包括特征提取、背景建模和目标跟踪等。
然后,我们将讨论该算法在不同领域的应用案例,以及相关技术的发展趋势。
最后,我们将对该算法的优势和不足进行总结,并展望未来的研究方向和应用前景。
通过本文的阅读,读者将能够深入了解像素偏移追踪算法的工作原理和实际应用,以及该算法在计算机视觉和图像处理领域的重要性和潜力。
希望本文能为读者提供有益的信息和启发,促进该领域的研究和应用进一步发展。
在1.2文章结构部分,我们将对整篇文章的组织结构进行说明。
本文将分为四个主要部分进行阐述。
第一部分是引言部分,我们将在这一部分中介绍文章的背景和目的。
我们将简要概述像素偏移追踪算法的基本原理和应用领域,并阐明为什么这个主题值得研究和讨论。
第二部分是正文部分,我们将详细介绍像素偏移追踪算法的基本原理。
我们将深入解释算法的实现细节,包括像素间的偏移量计算方法、像素变化的追踪和预测方法等。
视频分析技术的原理
视频分析技术的原理视频分析技术通常采用背景分离(背景减除)技术来进行图像变化的检测(所有的视频分析模式,如入侵、丢包、逆行等都是一种模式的图像变化)。
其思路是对视频帧与基准背景图像进行比较,相同位置的像素(区域)变化则认为是变化了的区域,对这些区域进一步处理、跟踪、识别,得到包括目标位置、尺寸、形状、速度、停留时间等基本形态信息和动态信息,完成目标的跟踪和行为理解之后,也就完成了图像与图像描述之间的映射关系,从而使系统进一步进行规则判定,直到触发报警。
背景减除法是目前普遍使用的运动目标检测方法,其算法本身需要大量的运算处理资源,并且仍然会受到光线、天气等自然条件及背景自身变化(海浪、云影、树叶摇动等情况)的影响。
但是,针对不同的天气以及自然干扰,已经有多种附加算法(过滤器)应用来弥补这些缺陷,随着芯片能力的提升及算法改进,相信视频分析技术会进一步成熟。
视频内容分析的关键技术前景目标的探测是视频分析技术实施的前提条件。
背景减除法是目前视频分析技术中用于前景目标探测的最常见方法,其原理是利用当前图象和背景图象的差分(SAD)来检测出运动目标(区域)的一种方法。
此方法可以提供比较完整的运动目标特征数据,精确度和灵敏度比较高,具有良好的性能表现,但对动态场景的变化,如光线变化情况也比较敏感。
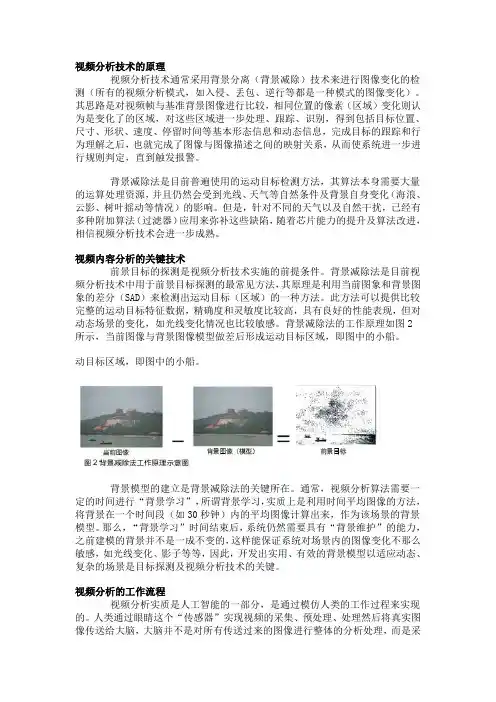
背景减除法的工作原理如图2所示,当前图像与背景图像模型做差后形成运动目标区域,即图中的小船。
动目标区域,即图中的小船。
背景模型的建立是背景减除法的关键所在。
通常,视频分析算法需要一定的时间进行“背景学习”,所谓背景学习,实质上是利用时间平均图像的方法,将背景在一个时间段(如30秒钟)内的平均图像计算出来,作为该场景的背景模型。
那么,“背景学习”时间结束后,系统仍然需要具有“背景维护”的能力,之前建模的背景并不是一成不变的,这样能保证系统对场景内的图像变化不那么敏感,如光线变化、影子等等,因此,开发出实用、有效的背景模型以适应动态、复杂的场景是目标探测及视频分析技术的关键。
基于光流的动态背景运动目标检测算法
1 H S光 流 法
光 流算 法通 常 假 定 : 与j 维 空 间物 体 点 对 应 的
亮 目标 检测算 法 。基 于 运动 补偿 的算 法通 过 对连 续 两 图像 点及 其邻 域 的灰 度 值在 运 动 中保 持 不 变 ( 度
。设 I , , 为 三 维 空 间某 点 t 刻 在 某 ( Yt ) 时 帧 中的一 帧做 运 动 补偿 , 动 态 背 景 转 换 为 静 态 背 守 恒 ) 将
-d 时 - 景 , 利用 帧 间 差 分 法 提 取 运 动 目标 区域 。该算 法 像 投影 的灰度 值 , I t 刻该 点 在 新 的 图像 中 的位 再
+ Y十 , 有 的有效 性很 大 程 度 上 取 决 于运 动补 偿 的准 确 性 , 而 置 为 ( , )根 据 以上假 设 , : 且 帧 间差 分后 只 能 得 到 运 动 目标 的边 缘 , 不 能 得 并
poe esedo edt t nfr oigojc adifstes rsrelnewt teP n Thcm r. rvdt p e fh e ci v bet n t h ma uviac i a/ i a ea h t e oo m n t i t l hh
字 塔 L _ 光 流法 通常 只计 算稀 疏 点光 流 , K9 运算 速度 较 快 , 用于 运 动 目标 检测 时无 法 提取 完 整 的 目标 。 但
将 () 2 式两 边 同除 d, 到 光流 约束 方程 : t得
O I
+ +
甏o :
( 3 )
光 流 约束 方程 的求 解 是 一 个 “ 态 ” 病 问题 , 须 必
S p 2 1 e 0 1
Vo 5 I2 N0 3
一种基于RGB图像的复杂背景下的运动检测方法
在于背景 的动态变化 , 以及 光照、 影子 、 天气等 的干
扰 。常有 的运 动 目标 检测 方 法 有 如下 几 种 :1基 于 ()
检测变化 区域的分割方法 , 即通过全局运动估计和补 偿后 , 认为相邻帧间的背景是静止 的, 可通过帧间的 差分检测 到运动 区域。N 3 为噪声具有高斯 特 e[ 认 ] 性而运动对象具有很强的结构 , 可采用互帧差的四次
J Xi ig , U Y n qo g ,LAO Hu. ig 认 . n IT a .in2 I i n I 1 u r ( .oeeo C m u r 1Cl g o pt &Ma e ac, iu nvrt,hnd 60 3 。Ci ; l f e t m t XhaU i syC egu 10 9 hn h i ei a
的条件下 , 着与背景色差异较 , 人运动 的视觉分析广泛应用在智能监控 、
等。动态 目 标检测的背景有两种类型 , 静态的背景和
运动的背景 。在静态背景中只有 目标物在动, 2 而动
态背景情况下 目标物和背景都在动 , 这时检测的困难
人机交互、 基于内容的图像检索、 计算机动画等领域。
人运动的视觉分 析包括运 动人 物 的检测 跟踪与识 别。所以运动人体的检测和提取是人体运动分析的
一
高阶统计量预分割 出运动区域和背景区域 。但在运 动对象的内部容易产生空洞。M cf 贝 提出一 种基 e 0 hJ
于变换检测模板的分割算法, 即阈值化相邻帧差获得 变化检测模板 , 然后采用松弛技术平滑边缘 , 再利用 对象形状的空间连贯性得到变化检测模板 , 通过去除 未覆盖的背景获得运动对象模板。这类方法计算简
tem t no u n.Heeanw m to rsne i o t n i tt n . h to frmoigteb c go n sda dte h o o fhma i r e eh di peetdw t u yl a i s T emehd o s h a mi o e vn h a kru di ue h s n
跟随器工作原理
跟随器工作原理
跟随器是一种设备,能够根据目标的位置和移动方向,自动追踪并跟随目标的运动。
它通常由一个主要组件(例如摄像机或雷达等)和一套运动控制系统组成。
以下是跟随器的工作原理:
1. 目标检测:跟随器首先使用主要组件(如摄像机)来识别和检测目标。
它可以通过计算机视觉算法、传感器或其他方法来实现。
2. 数据处理:一旦目标被检测到,跟随器会通过数据处理将目标的位置和其他相关信息提取出来。
这些信息可能包括目标的坐标、速度、方向等等。
3. 运动控制:跟随器使用所得到的目标信息来控制自身的运动。
它可以通过调整自身的方向、速度和位置来保持与目标的一定距离,并始终保持在目标的视野范围内。
4. 反馈机制:跟随器会不断更新目标信息,并根据目标的动态变化进行相应调整。
例如,如果目标加速移动,跟随器会相应加快自身的速度以保持与目标的距离。
总之,跟随器通过目标检测、数据处理、运动控制和反馈机制等步骤,可以实现自动追踪和跟随目标的功能。
它在许多领域中有广泛的应用,如机器人、无人机、摄影等。
运动摄像机下快速提取运动目标的新方法_向桂山
第36卷第10期 光电工程V ol.36, No.10 2009年10月Opto-Electronic Engineering Oct, 2009文章编号:1003-501X(2009)10-0001-05运动摄像机下快速提取运动目标的新方法向桂山( 浙江科技学院信息与电子工程学院,杭州 310023 )摘要:本文研究摄像机和目标同时运动情况下的实时目标提取问题。
首先运用背景差方法,检测出静止摄像机下的运动区域,为了克服连通域分析法耗时长的不足,提出重心偏移迭代法快速获得感兴趣运动目标。
在改进Camshift跟踪算法中,提出采用Bayesian概率法则在由Kalman滤波器预测的感兴趣区域(ROI)内获取颜色概率密度分布图像(CPDDI),引入即时背景(IB)以抑制背景特征。
提出依据跟踪结果进行目标提取的方法,即结合CPDDI 特征,并辅以适当的形态学滤波策略,从跟踪结果中提取出运动摄像机下的运动目标,解决目标被动态背景干扰的问题。
实验结果表明,提出的算法能够较稳定和完整地提取出运动摄像机下的运动目标,对复杂动态背景的适应性较强,且算法完全达到了实时的运行速度。
关键词:Camshift;重心偏移迭代方法;Bayesian概率法则;感兴趣区域;即时背景中图分类号:TP391 文献标志码:A doi:10.3969/j.issn.1003-501X.2009.10.001A Novel Method for Moving Object Extraction with an Active CameraXIANG Gui-shan( School of Information and Electronic Engineering,Zhejiang University of Science & Technology, Hangzhou 310023, China )Abstract: How to extract moving object in the case of moving camera is researched in this paper. At first, the background subtraction is implemented to detect the moving region in the case of motionless camera, and then the interested moving object is fast segmented from the detected moving region with the proposed method of barycenter shift iteration instead of the time-consuming method of connected components analysis. In the enhanced Camshift tracking algorithm, the Color Probability Density Distribution Image (CPDDI) in the Region of Interest (ROI) predicted by the Kalman filter is obtained, and Instantaneous Background (IB) is introduced to suppress background features. A novel method is suggested to extract the moving object from the tracking result combining CPDDI with proper morphologic filter strategy in the case of moving camera, which can resist the disturbance from the background. Experiments show that the proposed method can extract intact moving objects stably in the case of moving camera, and can well deal with dynamic complex background. The system is computationally efficient and can run in real-time speed.Key words: Camshift; barycenter shift iteration method; Bayesian law; region of interest; instantaneous background0 引 言智能视频监控是机器视觉的一个重要研究分支和应用领域,准确而快速地从监控视频图像中提取出运动目标是视频监控高层处理如目标分类与识别、行为理解预测及语义描述等的重要基础研究内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
帧灰度图 1 ( a ) 和当前帧灰度图 1 ( b ) , 利用投影式 ( 2) 分别得 到当前帧和参 考帧的行、 列投影曲线。 如图 1 ( c) , ( d) 分别为参考帧和当前帧图像的列投 影曲线, 图 1( e) , ( f ) 分别为参考帧和当前帧图像 的行投影曲线 , 图 1 ( g ) , ( h ) 分别是参考帧和当前 帧的行相关曲线、 列相关曲线。 2. 1. 2 位移相关检测 将第 k 帧图像的行、 列灰度投影曲线与参考帧 r 图像的行列灰度投影曲线做互相关计算, 根据两 条相关曲线的谷值即可确定当前帧图像相对于参 考帧图像的行列位移矢量值。式( 3) 为进行列相关 运算的计算公式: C( w ) =
sequences w ith global mo tion. T hr ough analyzing the r elated cur ves, three point loca lly adaptive sear ching a lg or ithm is pr o po sed o n the basis of sing le pea k char acter istics, T he m otion vecto r s betw een the successiv e imag e f ra mes can be e sti m ated by using this a lg or ithm. T hr o ugh maping the backgr o und o f the curr ent ima ge fr ame based o n the backgr o und o f the ref er ence im age f ra me, the global m ot io n v ecto rs can be co mpensate d. T he backgr o und o f successive image f ra mes ar e fixed to the sa me po sitio n of the sa me imag e fr ame. T hen the mo ving objec ts ca n be dete cted ex actly by using a m etho d o f impr ov ed three successive imag e fr ame s subtr action and classed w ith their char acte ristics. Exper imental results de mon stra te that this metho d can ef fectively e xtr act and distinguish m ov ing o bjects with changing backgr ound. Key words o bject detect io n, gr ay scale pro jec tio n, mo ve compensa tio n, thr ee imag e fr ames subtr action Class Number T P391. 41
k- 1
出运动目标的位置和形状轮廓信息。 d 1= | f k ( x , y ) - f d= d 1 d 2 (x, y) | ( 4) ( 5) ( 6) d 2= | f k + 1 ( x , y ) - f k ( x , y ) |
( 这 里是 2m + 1 = 2 ! 7+ 1= 15 )
1
引言
运动目标的检测在机器人研究和智能视频监
法无法准确地检测出运动的目标。考虑到当摄像 机运动时背景只是产生了平移 , 可以忽略摄像机的 旋转和变焦。本文采用改进的灰度投影的算法估 计出图像序列帧间运动矢量, 通过对灰度投影相关 曲线的分析, 利用其具有单峰性的特点 , 提出了三 点局域自适应搜索算法代替全局搜索算法 , 减小了 运算量。从而快速的计算出相邻两帧之间的位移 矢量 , 以参考帧图像背景为参照, 映射当前帧的背 景信息, 成功的补偿了背景的运动。将连续三帧图
均匀选取 3 个点 , 计算这 3 个点处的 C( w ) 值找到 C( w ) 值最小的点。这里设找到的最小值点是第 8 个点。以最小值点 ( 8 ) 为中心在 ( m - 1 ) / 2 搜索宽 度内均匀选取 3 个点 , 计算这 3 个点处的 C( w ) 值 , 找到 C( w ) 值最小的点 . 设找到点是第 10 个点。以 点( 10) 为中心在 [ ( m - 1) / 2- 1] / 2 的搜索宽度内 均匀选取 3 个点 , 计算这 3 个点处的 C( w ) 值找到 C( w ) 值最小的点, 则该点即是所要求的相关值为 最小时的匹配点。该搜 索算法是利用 C ( w ) 分布 的单峰性特点在搜索过程中 自动判断 C( w ) 可能 减小的方向 , 并相应调整搜索的参数。搜索宽度为 2n - 1 时三点局域自适应搜索算法所需运算量为 3n, 而全局搜索算法的运算量为 2 n+ 1 - 1 。随着搜 索宽度的增大三点局域自适应搜索算法的速度优 势越明显。 2. 2 改进的连续三帧差分法提取运动目标 该方法分为三个步骤 : 1) 利用灰度投影算法估 计出第 k 帧相对于 k - 1 帧背景的位移矢量, 将 k 1 帧配准到第 k 帧 ; 同样的方法将第 k + 1 帧配准 到第 k 帧。2) 利用帧差分法对补偿后的图像进行 差分 , 得到差分图像 d 1 和差分图像 d 2 ; 3) 对差分 图像 d 1 和 d 2 进行∀ 与# 运算得到差分图像 d, 对差 2. 2. 1 改进的连续三帧差分法目标检测流程
L j= 1
G k( i, j ) G k ( i, j ) ( 1)
[ G k ( j + w - 1) - G r ( m + j ) ] 2 1 w 2m + 1 ( 3)
i
式中 Gk ( j ) 、 G r ( j ) 分别为第 k 帧和参考帧 r 的第 j 列 G k ( i, j ) - E G k( i, j ) - E ( 2) 的灰度投影值, L 为列的长度 , m 为位移矢量相对与 参考帧在一侧的搜索宽度。设 W m in 为 C( w ) 最小时 的 w 值, 则第 k 帧图像相对于参考帧图像在垂直方 向的位移矢量为 c = m + 1- W m in 。得到了水平方向 和垂直方向的位移矢量后, 就可以把当前图像像素
T P391. 41
A M ethod Of M oving Objects Det ect ion Based o n Non St ationary Backgro und
L uan Qinglei Chen Z hengw ei He Y ong ( Scho o l o f Ele ctric Enginee ring and A uto mation, Hef ei U niver sity o f T e chno log y, H efe i 230009) Abstract T he impr o ved gr ay scale pr o ject io n alg or ithm is pr opo sed based on the mo ving o bjects de tectio n o f video
总第 228 期 2008 年第 10 期
计算机与数字工程 Computer & D ig ital Eng ineer ing
V ol. 36 N o. 10 165
一种运动背景下移动目标的检测方法
栾庆磊 陈正伟 何 勇
合肥 230009) ( 合肥工业大学电气与自动化工程学院 摘 要
*
针对全局运动视频序列中的目标检测 , 提 出了改进的灰度投影 算法。通过 对灰度投影 相关曲线的 分析 , 根据
i
归一化后式( 2) 中 G k ( i ) , G k ( j ) 分别为第 k 帧图像 的第 i 行和第 j 列的灰度值的和, G k ( i, j ) 是第 k 帧 图像上( i , j ) 位置处的像素灰度值。对于给定参考
第 36 卷 ( 2008) 第 10 期
计算机与数字工程
167
向位移矢量的相反方向移动相应大小的像素距离, 或者将前一帧图像像素沿着位移矢量移动相应大 小, 从而成功补偿了图像序列背景的运动. 2. 1. 3 快速搜索算法的构建 传统灰度投影算法在求取行列的位移矢量时 采用的是全局搜索算法 ( FS ) [ 2] 见 式 ( 3 ) 。以搜索 宽度内一点所做的互相关计算量为一个运算单位 , 则检测两幅图像的帧间运动矢量所需的运算量为 2m + 2n + 2( 其中 m 为设定的行搜索宽度 , n 为设 定的列搜索宽度 ) 。采用该种全局搜索算法寻找最 佳匹配点计算量大, 耗时长。本文提出了一种三点 局域自适应搜索 算法代替全局搜 索算法。如图 2 所示这里以搜索 宽度 m 等 于 7 为例说明该搜索 算法 的 步 骤. 在 有效搜索范围内
2
2. 1
背景补偿和运动目标区域检测
灰度投影算法 灰度投影算法 [ 1] 能够充分利用图像灰度总体
分布的变化规 律, 较准确 地估计出图像 的运动矢 量。为了保证实时性 , 要求帧间运动矢量估计所用
图 1 当前帧与参考帧灰度投影曲线及相关曲线
基于这个原理, 人们提出了灰度投影算法: 将 图像的灰度分布按式 ( 1) 映射成行 X , Y 方向上的 独立的一维波形。为了消除由于光照不同造成的 相关误差 , 需要对投影矢量做均值归一化处理, 首 先求取投影矢量的均值 E, 再对式 ( 1) 进行变换 , 变 换后结果如式 ( 2) 所示 , 其中 E 是图像灰度值的均 值。经过投影变换得到了反映图像灰度分布特点 的各行、 列的灰度投影曲线。将当前帧图像的行、 列灰度投影曲线与参考帧图像的行、 列灰度投影曲 线做互相关计算 , 根据 2 条相关曲线的谷值即可确 定当前帧图像相对于参考帧图像的行、 列位移矢量 值。 G k ( i) = Gk ( j ) = G k ( i) = Gk ( j ) =