DAM—BBOPSO算法的Multi—UAV集群攻击任务规划
基于多uav的任务分配算法比较与分析
1 建立任务分配控制方法 实现任务分配要先构建控制方法平台,在经典任务分配
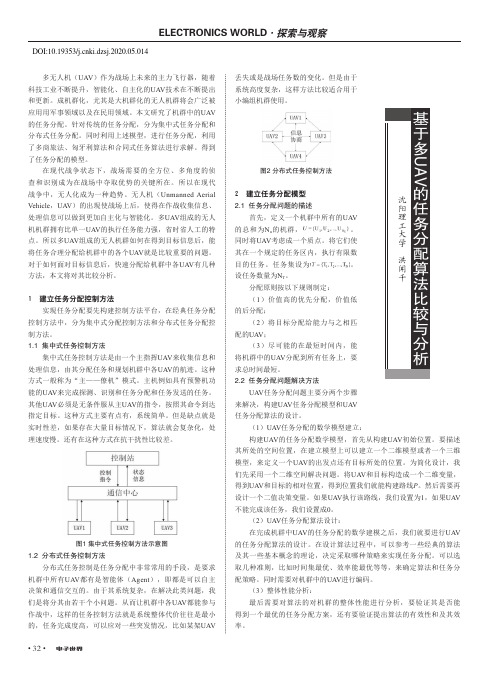
控制方法中,分为集中式分配控制方法和分布式任务分配控 制方法。 1.1 集中式任务控制方法
集中式任务控制方法是由一个主指挥UAV来收集信息和 处理信息,由其分配任务和规划机群中各UAV的航迹。这种 方式一般称为“主——僚机”模式。主机例如具有预警机功 能的UAV来完成探测、识别和任务分配和任务发送的任务。 其他UAV必须是无条件服从主UAV的指令,按照其命令到达 指定目标。这种方式主要有点有,系统简单。但是缺点就是 实时性差,如果存在大量目标情况下,算法就会复杂化,处 理速度慢。还有在这种方式在抗干扰性比较差。
目的任务。任务集设为
。
设任务数量为NT。 分配原则按以下规则制定:
(1)价值高的优先分配,价值低 的后分配;
(2)将目标分配给能力与之相匹 配的UAV;
(3)尽可能的在最短时间内,能 将机群中的UAV分配到所有任务上,要 求总时间最短。的沈 阳 Nhomakorabea 工 大
任 务 分
学配
洪 闻 千
算 法
比
较
面向无人机路径规划的多目标粒子群优化算法
DOI: 10.11991/yykj.202011008面向无人机路径规划的多目标粒子群优化算法苏子美,董红斌哈尔滨工程大学 计算机科学与技术学院,黑龙江 哈尔滨 150001摘 要:针对无人机路径规划中方案单一的问题,本文提出一种基于集分解的多目标综合学习粒子群优化算法框架(MOCS-PSO/D),该算法使用基于分解的多目标优化框架(MOEA/D),结合基于集的粒子群优化(S-PSO)和综合学习粒子群优化(CLPSO),对CLPSO 和PSO 的速度更新公式进行改进,直接获得更多样的路径规划方案,同时可以降低调用无人机数量。
该算法将通过仿真实验与最近邻随机混合算法、遗传算法和基于集的综合学习粒子群优化算法(CS-PSO)对比,且在算法的收敛性、多样性上进行分析。
关键词:智能系统;无人机;路径规划;贪心策略;多目标优化;粒子群优化;进化算法;自适应中图分类号:U675.79 文献标志码:A 文章编号:1009−671X(2021)03−0012−10Multi-objective particle swarm optimization algorithmfor UAV path planningSU Zimei, DONG HongbinCollege of Information and Communication Engineering Harbin Engineering University, Harbin 150001, ChinaAbstract : Aiming at the problem of single scheme in UAV (Unmanned Aerial Vehicle) path planning, this paper proposes a multi-objective comprehensive learning particle swarm optimization algorithm framework based on set decomposition (MOCS-PSO/D). The algorithm uses the decomposition based multi-objective optimization framework (MOEA/D),combines set based particle swarm optimization (S-PSO) and comprehensive learning particle swarm optimization (CLPSO), so as to directly obtain more diverse path planning schemes, at the same time, in order to reduce the number of UAVs, the local search strategy is improved. The algorithm will be compared with the nearest neighbor random mixed hybridalgorithm, genetic algorithm and set based comprehensive learning particle swarm optimization (CS-PSO) through simulation experiments, and will be carried out in terms of convergence and diversity of solutions analysis.Keywords: intelligent system; UAV; path planning; greedy strategy; multi-objective optimization; particle swarm optimization; evolutionary algorithm; adaptive无人机路径规划的应用领域正变得越来越广。
基于MAS的多UAV协同任务分配设计与仿真
基于MAS的多UAV协同任务分配设计与仿真
廖沫;陈宗基;周锐
【期刊名称】《系统仿真学报》
【年(卷),期】2007(19)10
【摘要】对多无人机UAV(Uninhabited Aerial Vehicle)协同任务问题,提出了基于多智能体系统MAS(Multi-Agent System)的系统框架;对多UAV协同目标分配问题建立了数学模型,提出基于Agent的分布协同拍卖的动态任务分配算法,通过多Agent拍卖实现目标分配;建立了多UAV仿真系统,基于HLA/RTI和知识共享与操作语言KQML(Knowledge Queryand Manipulate Language)实现多UAV系统中各Agent的交互;仿真系统能方便有效的仿真多机协同问题,对目标分配问题的仿真结果表明,目标分配算法具有良好的优化效果和时间特性,能够满足一般战场的实时性需求。
【总页数】5页(P2313-2317)
【关键词】无人机;目标分配;拍卖;MAS;HLA;KQML
【作者】廖沫;陈宗基;周锐
【作者单位】北京航空航天大学自动化科学与电气工程学院
【正文语种】中文
【中图分类】TP301
【相关文献】
1.基于CNP和MAS的航空兵编队协同任务分配 [J], 林云;粘松雷
2.基于多目标MSQPSO算法的UAVS协同任务分配 [J], 韩博文;姚佩阳;孙昱
3.基于MAS的勤务维修协同任务分配策略 [J], Jian-kang DONG;Lei-ming YUE
4.基于改进PSO的多UAV协同任务分配研究 [J], 韩庆田
5.基于改进PSO的多UAV协同任务分配研究 [J], 韩庆田
因版权原因,仅展示原文概要,查看原文内容请购买。
多 UAV 集结任务的分布式协同与优化控制
多 UAV 集结任务的分布式协同与优化控制贾方超;姚佩阳;陈洁钰;王勃【期刊名称】《电光与控制》【年(卷),期】2014(000)008【摘要】基于一致性理论的多无人机分布式协同控制已广泛运用于无人机作战中,通过一致性控制算法实现状态一致完成协同需求。
建立了集结问题的数学模型,基于协调变量和协调函数的分解策略进行求解。
为实现协同控制的最优性,改进了平均一致性控制算法,采用Hamilton-Jacobi-Bellman方程给出基本优化一致性控制算法。
在控制算法中引入过去状态差值,提高控制算法的动态响应性和能量最优性;同时采用遗传算法优化代价函数的加权矩阵,进一步提高控制算法的动态响应性和能量最优性,缩短了任务执行时间。
理论分析和仿真实验验证了方法的有效性和可行性。
【总页数】9页(P24-32)【作者】贾方超;姚佩阳;陈洁钰;王勃【作者单位】空军大连通信士官学校,辽宁大连 116600;空军工程大学信息与导航学院,西安 710077;空军工程大学信息与导航学院,西安 710077;空军工程大学信息与导航学院,西安 710077【正文语种】中文【中图分类】V271.4;TP273.1【相关文献】1.快速一致性控制算法下的多 UAV分布式协同控制 [J], 贾方超;姚佩阳;马方方;李巧丽2.基于多目标MSQPSO算法的UAVS协同任务分配 [J], 韩博文;姚佩阳;孙昱3.基于态势感知一致性的UAV集群分布式协同性能分析 [J], 高杨;李东生4.多UAV攻击移动目标的协同任务分配与航迹规划 [J], 陈侠;刘永泰5.应急搜索UAV集群协同任务规划策略 [J], 鲁旭涛;智超群;张丽娜;秦英伟;李静;王英因版权原因,仅展示原文概要,查看原文内容请购买。
应急救援系统中的多 UAV 协同任务调度算法研究
应急救援系统中的多 UAV 协同任务调度算法研究随着科技的不断进步和无人机技术的成熟,无人机在应急救援领域扮演着越来越重要的角色。
多无人机的协同任务调度算法是提高救援效率和响应速度的关键。
本文将探讨应急救援系统中多UAV 协同任务调度算法的研究与应用。
一、无人机任务调度的重要性1. 救援效率提升:在应急救援任务中,时间通常是最重要的因素,因为救援人员需要尽快到达灾难现场,提供帮助。
多无人机的协同任务调度算法能够实现任务的高效分配,优化路径规划,最大化利用无人机资源,从而提高救援效率。
2. 资源优化利用:无人机是一种昂贵的设备,合理的任务调度能够避免资源浪费,提高资源利用率。
通过算法的优化,可以最大限度地使用可用的无人机,避免任务之间的冲突,合理安排时间和能量消耗。
3. 减少人员风险:应急救援任务通常面临极端环境和危险情况,直接派遣救援人员存在一定的风险。
利用无人机执行任务可以减少人员在救援过程中的风险,降低意外事故的发生。
二、常见的多 UAV 协同任务调度算法1. 遗传算法:遗传算法是一种模拟生物进化过程的优化算法,通过不断迭代、交叉和变异来搜索最优解。
在无人机协同任务调度中,可以将每个无人机的任务分配视为染色体,并通过遗传算法来求解最优的任务分配方案。
2. 蚁群算法:蚁群算法是模拟蚂蚁觅食行为的一种启发式算法,适用于解决旅行商问题等优化问题。
在多无人机任务调度中,可以将无人机视为蚂蚁,将任务分配作为路径选择问题来解决,通过信息素的积累和挥发来实现任务的优化分配。
3. 粒子群优化算法:粒子群优化算法是模拟鸟群觅食行为的一种优化算法,通过个体的自我认知和群体的合作来搜索最优解。
在多无人机任务调度中,可以将无人机视为粒子,通过粒子的位置和速度来表示任务分配和路径规划,在群体中寻找最优解。
三、多 UAV 协同任务调度算法研究进展1. 静态环境下的任务调度:静态环境下多 UAV 协同任务调度是指在灾难发生前已经准备好任务信息和环境信息的情况下进行任务调度。
多ucav对地打击协同任务分配方法
多ucav对地打击协同任务分配方法多UCAV对地打击协同任务分配方法随着无人机技术的不断发展,多UCAV(Unmanned Combat Aerial Vehicle,无人作战飞行器)对地打击协同任务已经成为未来战争的重要形态之一。
在这种情况下,如何高效地进行任务分配是一个非常重要的问题。
本文将从以下几个方面介绍多UCAV对地打击协同任务分配方法。
一、任务需求分析在进行任务分配之前,首先需要进行任务需求分析。
通过确定目标类型、数量、位置、防御力量等因素,明确每个目标的重要性和优先级,以及每个UCAV的能力和限制。
这样可以为后续的任务分配提供必要的信息和依据。
二、多目标规划算法针对多目标规划问题,可以采用基于遗传算法或粒子群算法等优化算法进行求解。
具体实现过程如下:1. 将每个目标看做一个决策变量,其取值为0或1,表示是否选中该目标。
2. 设计适应度函数,并根据需求确定优化目标,比如最小化攻击时间、最大化毁伤效果等。
3. 初始化种群,并使用交叉、变异等操作进行进化。
4. 结合实际情况,设置适当的约束条件,比如每个UCAV的弹药数量、最大攻击距离等。
5. 迭代求解,直到达到预设的停止条件。
通过多目标规划算法,可以实现多UCAV对地打击协同任务分配的优化,提高任务完成效率和毁伤效果。
三、基于博弈论的任务分配方法在多UCAV对地打击协同任务中,每个UCAV都有自己的利益追求和限制条件。
因此,可以采用博弈论中的合作博弈模型来进行任务分配。
具体实现过程如下:1. 将每个UCAV看做一个参与者,并根据其能力、限制条件等确定其收益函数和策略集合。
2. 设计合作博弈模型,并确定核心解集合。
3. 通过核心解集合确定最优分配方案,并进行分配。
通过基于博弈论的任务分配方法,可以实现多UCAV之间的资源共享和利益平衡,提高整体效益和稳定性。
四、基于深度学习的任务分配方法近年来,深度学习技术在军事领域得到了广泛应用。
在多UCAV对地打击协同任务中,可以采用基于深度学习的任务分配方法。
基于PSO算法的多巡飞器任务分配方法
基于PSO算法的多巡飞器任务分配方法
李大林;李杰
【期刊名称】《北京理工大学学报》
【年(卷),期】2010(30)12
【摘要】为使多个巡飞器协同完成针对地面多个目标攻击任务,从巡飞器载荷较小的特点出发,基于PSO算法对其任务分配方法进行了研究.根据巡飞器两种任务介入方式的不同,分别建立了布撒方式任务分配问题模型以及陆基发射方式任务分配问题模型.根据模型的复杂程度,分别选择使用基本PSO全局优化算法以及考虑资源消耗情况下对PSO整数规划算法进行改进后的算法,求解两种任务分配问题.仿真结果表明,算法可解决任务分配问题,任务分配方法合理,适应巡飞器协同需求.
【总页数】4页(P1436-1439)
【关键词】粒子群优化算法;任务分配方法;多巡飞器
【作者】李大林;李杰
【作者单位】北京理工大学机电学院
【正文语种】中文
【中图分类】TJ012.3
【相关文献】
1.基于ACA_PSO算法的无人机分布式任务分配方法 [J], 张瀚桥;侯琳;宋科璞
2.不确定环境下基于PSO算法的多无人机任务分配方法 [J],
3.基于改进遗传算法的多巡飞器空投任务介入点优化方法 [J], 李大林;王军波;沈晓
军;李杰
4.基于买卖合同策略与PSO算法的异构UAV任务分配规划方法 [J], 邢焕革;马曲立;任涛
5.基于改进PSO算法的四旋翼飞行器飞控系统PID参数整定 [J], 付俊庆;林朗因版权原因,仅展示原文概要,查看原文内容请购买。
多UAV攻击移动目标的协同任务分配与航迹规划
收稿日期:2019-05-05修回日期:2019-07-18基金项目:国家自然科学基金青年基金资助项目(61503255)作者简介:陈侠(1962-),女,辽宁新民人,博士(后),教授,硕士生导师。
研究方向:无人机任务规划。
*摘要:针对地面移动目标的多无人机协同任务分配与航迹规划问题,给出了一种新方法。
建立了结合任务分配的多无人机协同航迹规划模型,给出了多无人机协同打击地面移动目标的任务分配方法,并提出了一种改进的蚁群算法,可以快速地对地面多个移动目标规划出有效的航迹,得到效费差最大的任务分配与航迹规划方案。
仿真结果表明,提出的方法不仅可以有效地规划出合理的航迹,也可以获得最大的打击收益值,提高了多无人机协同作战能力。
关键词:移动目标,协同任务分配,航迹规划,蚁群算法中图分类号:TP391.9文献标识码:ADOI :10.3969/j.issn.1002-0640.2020.09.007引用格式:陈侠,刘永泰.多UAV 攻击移动目标的协同任务分配与航迹规划[J ].火力与指挥控制,2020,45(9):35-40.多UAV 攻击移动目标的协同任务分配与航迹规划*陈侠,刘永泰(沈阳航空航天大学,沈阳110136)Cooperative Task Assignment and TrackPlanning for Multi-UAV Attack Mobile TargetsCHEN Xia ,LIU Yong-tai(Shenyang Aerospace University ,Shenyang 110136,China )Abstract :A new method is presented to solve the problem of multi -UAV cooperative taskassignment and track planning for ground moving targets.Firstly ,a multi -UAV cooperative track planning model based on task assignment is established.The task assignment method of multi -UAV cooperative attack ground moving target is given.An improved ant colony algorithm is proposed ,which can quickly plan the effective track for multiple moving targets on the ground ,and the task allocationand track planning scheme with the largest efficiency-cost difference is obtained.The simulation results show that the method proposed in this paper can not only effectively plan reasonable flight path ,but also obtain the maximum attack profit value and improve the cooperative combat ability of multi-UAV.Key words :moving target ,collaborative task allocation ,track planning ,ant colony algorithm Citation format :CHEN X ,LIU Y T.Cooperative task assignment and track planning for multi-UAV attack mobile targets [J ].Fire Control &Command Control ,2020,45(9):35-40.0引言航迹规划与任务分配作为UAV 作战系统的重要组成部分,其技术的发展近些年越来越受到国内外学者的重视。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abs t r a c t:T h e r a p i d d e v e l o pme n t o f mo d e r n d e f e n s e t e c h no l o g y l o we r s t h e UAVs a t t a c k i ng e f f e c t g r e a t l y,t h e a u — t o n o mo u s f o r ma t i o n a n d c l us t e r a t t a c k t e c h n i q u e o f Mu l t i - — UAV h a s b e c o me o n e o f t h e k e y t e c h n o l o g i e s i n f u t u r e b a t ・ ・
中图分类号 : V 2 7 9 文献标志码 : A 文章编 号 : 1 0 0 6 — 7 0 4 3 ( 2 0 1 3 ) 1 0 — 1 2 4 2 — 0 7
Re s e a r c h o n c l us t e r a t t a c k mi s s i o n p l a n n i n g o f
D A M— B B O P S O算 法 的 Mu l t i — U A V集群攻 击任务规 划
李杰, 孙尧 , 莫宏伟
( 哈 尔 滨 工程 大 学 自动 化 学 院 , 黑龙 江 哈 尔滨 1 5 0 0 0 1)
摘
要: 现代防御技术的迅速发展使得无人 驾驶 飞行器 的攻击效果大大下降 , 无人 驾驶 飞行器 自主编 队集群攻击技 术已
第 3 4卷第 1 O期
2 0 1 3年 1 0月
哈
尔
滨
工
程
大
学
学
报
Vo 1 . 3 4 N o. 1 0 0C t . 2 01 3
J o u r n a l o f Ha r b i n E n g i n e e r i n g U n i v e r s i t y
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 6 — 7 0 4 3 . 2 0 1 3 0 5 0 0 4
网络 出版 地 址 : h t t p : / / w w w . c n k i . n e t / k c m s / d e t a i l / 2 3 . 1 3 9 0 . U . 2 0 1 3 0 9 1 7 . 2 3 1 1 . 0 1 7 . h t m l
Mu l t i - UAV b a s e d o n DAM — BBOPS O a l g o r i t h m
L I J i e ,S UN Ya o,MO Ho n g w e i
( C o l l e g e o f A u t o ma t i o n , H a r b i n E n g i n e e r i n g U n i v e r s i t y , H a r b i n 1 5 0 0 0 1 , C h i n a )
t l e i f e l d,a n d t h e mi s s i o n p l a n n i n g a l g o r i t h m a mo n g Mu l t i — U AV i s t h e k e y t o t h e s mo o t h a n d e f f e c t i v e c o mp l e t i o n o f
经成为未来 战场 的关键技术之一 , 多无人机之 间的任务规划算 法是保 证无人机顺 利 、 高效完成 任务 的关 键. 将无人机集 群攻击任务规划 问题看成是多约束 的任务分配过程 , 建立任务规划模型 , 结合 分布式拍卖机制和生物地理算法对粒 子群 优化算法 的粒子初始化和寻优过程进行改进. 根 据实际约束条件生 成初始粒 子 , 保 证 了粒子 的多样性 ; 在算 法优化过 程
p h y . b a s e d o p t i mi z a t i o n( B B O) , t h e p a r t i c l e i n i t i a l i z a t i o n a n d o p t i mi z a t i o n p r o c e s s o f P S O a l g o i r t h m i s i m p r o v e d
中, 利用生物地理算法与粒子群算法对粒子运动进行动态的控制 , 使得算 法具有 更好 的适应 性与稳定 性. 仿真结果 表明
运 用分布式拍 卖机制 生物地理粒子群优 化算法得到 的方案不仅 完全满无人机 集群攻击任务 的要求 , 而 且 比传统粒 子群 优化算法和生物地理粒子群优 化算 法具有更好 的收敛性. 关键词 : 多无人机 ; 生物地 理算 法 ; 分布式拍卖机制 ; 粒子群优化 ; 任 务规 划