基于单片机技术的伺服转台控制器的设计
基于单片机的伺服电机控制本科毕业设计
毕业设计(论文)论文题目基于单片机的伺服电机控制器基千单片机的伺服电机控制器随着电力电子技术、智能控制技术的发展成熟,伺服机控制器已成为自动化装置的一个重要部分。
例如,印刷机应用了伺服机控制器来控制电机的转速和传送长度。
本论文阐述了基于单片机的伺服机控制器的控制原理,位置控制和电子齿轮的特点和应用,采用单片微机AT89S52作为中央控制器,AM26LS31为驱动器。
AT89S52主要与E - II控制器连接了位置控制,方向控制,正反转限制等。
AT89S52从P1 口输出脉冲序列,利用I丨控制器电子齿轮简便设置,控制伺服电机的总转动角度,控制输出脉冲的频率就可以控制伺服电机的速度,以达到控制伺服电机的目的。
此外还介绍了 E - II的控制器的结构连接图,特性,功能和用户常数设定,SGM □丨1型伺服机的发展,优点和工作原理。
还有介绍伺服系统的基本内容。
关键词:伺服系统;位置控制;电子齿轮;单片机AT89S52摘要ABSTRACTAs development of electric and electronic technology , intellectual control technology being ripe, the servo machine controller has already become an important part of the automatic device . For example, the printing machine has used the servo machine controller to control the rotational speed of the electrical machinery and length of conveyance. Thi k s thesis has explained the principle of control based on servo machine controller of the one-chip computer, position control and electronic characteristic and application of gear wheel, adopt single blocks of computer AT89S52 as the central controller, AM26LS31 is a driver . AT89S52 has connected position control with controller mainly, directional control, rotate positive and negativly and limit etc.. AT89S52 outputs the pulse array from PI mouth, utilizes controller's electronic gear wheel to be set up simply and conveniently, controlling always rotating the angle of the servo electrical machinery, controlling the frequency of outputting the pulse can control the temjx) of the servo electrical machinery , in order to achieve the goal of controlling the servo electrical machinery. In addition has recommended the structure of the controller of connect and pursue , the characteristic, the function and user's constant are established , SGM .The development of the type servo machine , the advantage and operation principle. Still introduce the basic content of the servo system.KEY WORDS: Servo system ; Position control; Electronic gear wheel ;One-chip computer AT89S52目录摘要 (I)ABSTRACT ........................................................................................................................................................... I I 引言 . (1)1伺服电机和控制器 (2)1.1伺服机的介绍 (2)1. 1. 1交流祠服机的发展 (2)1. 1. 2交流祠服机的优点 (2)1.2控制器的介绍 (2)1. 2.1控制器的特点 (2)1. 2. 2 E - IH司服控制器的介绍 (3)1. 2. 3 S - II伺服控制器的功能说明 (6)1. 2. 4 E - II伺服控制器的设定 (8)2伺服系统的控制 (11)2.1伺服电机的基本原理 (11)2. 1. 1伺服电机的工作原理 (11)2. 1. 2伺服电机的特点 (12)2.2伺服系统的介绍 (12)2.2.1伺服系统的概念 (12)2. 2. 2伺服系统定义 (13)2.2.3伺服的主要任务 (13)2.2.4伺服系统的组成 (13)2. 2. 5伺服系统的性能要求 (13)2. 2. 6伺服系统的种类 (13)2. 2. 7伺服系统对伺服电机的要求 (14)2.2_ 8伺服控制方式的优点和缺点 (14)3基于单片机的伺服机控制器 (15)3.1元器件AM26LS31和AT89S52的介绍 (15)3. 1. 1 AM26LS31 的工作原理 (15)3. 1. 2 AT89S52 的介绍 (15)3. 1. 3 AT89S52单片机的引脚介绍 (16)3.1.4中断系统 (18)3.2位置控制 (19)3. 2. 1位置指令 (19)3. 2. 2基于单片机的数字位置控制 (19)3. 2. 3位置控制的控制原理 (19)基千单片机的伺服电机控制器3. 2.4脉冲信号的产生 (20)3. 2. 5伺服电机的转速控制方式 (20)3. 3控制单元 (20)3. 4超程设定 (21)3. 4. 1超程设定的概念 (21)3.4. 2超程功能的使用 (21)3. 5 PWM控制技术 (22)3. 5. 1 PWM控制技术的定义 (22)3. 5. 2 PWM技术的应用 (22)3. 6电子齿轮 (23)3. 6.1电子齿轮的概念 (23)3. 6. 2电子齿轮的设定方法 (23)3. 6. 3电子齿轮比(B/A)。
基于单片机的直流伺服电机PWM控制系统课程设计

成绩运动控制系统课程设计题目: 基于单片机的直流伺服电机PWM控制系统院系名称: 电气工程学院专业班级: xxx 学生姓名: xxx 学号: xxxx 指导教师: 石庆生评语:摘要单片机是应控制领域应用的要求而出现的,随着单片机的迅速发展,起应用领域越来越广。
尽管目前已经发展众多种类的单片机,但是应用较广、也是最成熟的还是最早有Intel开发的MCS-51系列单片机(51系列单片机)。
51系列单片机应用系统已经成为目前主流的单片机应用系统。
直流电机脉冲宽度调制(Pulse Width Modulation—简称PWM)调速产生于20世纪70年代中期,最早用于自动跟踪天文望远镜,自动记录仪表等的驱动,后来用于晶体管器件水平的提高及电路技术的发展,PWM技术得到了高速发展,各式各样的脉宽调速控制器,脉宽调速模块也应运而生,许多单片机也都有了PWM输出功能。
而MCS—51系列单片机作为应用最广泛的单片机之一,却没有PWM 输出功能,本课设采用配合软件的方法实现了MCS—51单片机的PWM输出调速功能,这对精度要求不高的场合时非常实用的。
目录1、前言 (1)1.1单片机的发展史 (1)1.2本设计任务 (1)2、总体设计方案 (2)3、硬件电路设计 (2)3.1硬件组成 (2)3.2主要器件功能介绍 (3)3.2.1直流伺服电机简介 (3)3.2.2 PWM简介及调速原理 (4)3.2.3 传感器选择 (5)3.3电路组成 (6)3.3.1 晶振电路 (6)3.3.2 复位电路 (6)3.3.3 单相桥式整流电路 (7)3.3.4 调制电路 (7)4、系统软件设计 (8)4.1系统简介及原理 (8)4.2系统设计原理 (8)4.3程序流程图 (10)5、建模 (11)5.1控制框图 (11)5.2参数计算 (12)5.3PWM变换器环节的数学模型 (14)5.4仿真结果图 (14)总结 (16)参考文献 (17)附件1:汇编设计 (18)附件2: (20)1、前言1.1 单片机的发展史单片机作为微型计算机的一个重要分支,应用面很广,发展很快。
基于单片机的伺服电机转速控制系统

基于单片机的伺服电机转速控制系统摘要传统的晶闸管直流调速系统,其控制回路都是采用模拟电子线路构成的,晶闸管触发器多数还是采用分立元件组成的,这使得控制回路的硬件设备极其复杂,安装调试困难,相对故障率较高。
针对传统的晶闸管直流调速系统的一些不足,提出了一种基于单片机的伺服电机转速控制系统的设计方法,并介绍了PID控制算法的设计。
本设计使用AT89C52作为控制芯片,以PI(比例-积分)调节控制算法为基础,采用软件编程产生脉宽比可控的脉宽调制信号,再通过功率放大电路H桥驱动电路来控制伺服电机电枢电压,从而完成对伺服电机转速的调节,达到了较好的控制性能。
同时通过4*4小键盘输入设定的伺服电机转速,用光电编码器来测定伺服电机转速,显示在4位LED 上。
关键词:直流调速;PID控制算法;AT89C52;脉宽调制;伺服电机The Servo Motor Speed Control System Based On MCUAbstractThe conventional DC drive system of SCR, which Control loop is consisting of simulate electronic circuits, and the SCR trigger is mostly made up of the discrete component, so the hardware devices are extremely complex in the Control loop,the installation and trial run difficultly, the relative failure rate is high. To solve the problems, this paper presents one kind design method of the servo motor speed control system based on MCU, and introduces the design of the PID control algorithm.This design uses AT89C52 as the controller chip, takes PI (proportion - integral) regulation control algorithm to be the foundation, adopts software programming to get the signal for Pulse-Width-Modulation, and controls the armature voltage of servo motor through H bridge driving circuit in power amplification electric circuit, thus it completes to adjust the servo motor rotational-speed, and achieves the good control performance. Meanwhile it set s the servo motor rotational-speed through the 4*4 small keyboard, and minutes the speed of the servo motor by the optical encoder, then shows the speed of the servo motor on the 4 LED.Key word: Direct-current speed regulation; PID control algorithm; AT89C52;Pulse-Width-Modulation; Servo motor目录摘要 (I)Abstract (II)第一章引言 (1)1.1 课题的研究背景及意义 (1)1.2 转速控制系统设计目标及技术要求 (3)第二章伺服电机转速控制系统设计 (4)2.1 系统硬件组成原理 (4)2.2 PID控制算法简介 (4)2.2.1 位置式PID控制算法 (6)2.2.2 增量式PID算法 (8)第三章硬件部分的设计 (12)3.1 直流电机调速原理 (12)3.2 PWM波形发生电路 (13)3.2.1 PWM基本原理 (13)3.2.2 PWM信号的产生 (14)3.3 PWM功率放大电路 (15)3.3.1 H桥驱动电路原理 (15)3.3.2 PWM驱动电路原理图 (17)3.4 测速电路 (18)3.5 键盘电路 (19)3.6 LED显示电路 (21)3.7 AT89C52的时钟电路 (23)3.8 AT89C52的复位电路 (24)第四章软件部分的设计 (26)4.1 主程序流程 (27)4.2 PID控制算法程序流程 (28)4.2.1 PID控制算法选择 (28)4.2.2 PID运算控制模块子程序 (29)4.3 按键处理子程序 (30)4.4 键盘扫描程序 (31)4.5 转速采集子程序 (31)4.6 LED显示子程序 (32)结束语 (33)附录A 基于单片机的伺服电机转速控制系统电路图 (34)附录B 源程序 (35)附录C 基于单片机的伺服电机转速控制系统器件一览表 (57)参考文献 (58)致谢 (60)第一章引言1.1 课题的研究背景及意义目前单片机渗透到我们生活的各个领域,几乎很难找到哪个领域没有单片机的踪迹。
论单片机DSP在伺服驱动器中的设计与研究

论单片机DSP在伺服驱动器中的设计与研究伺服驱动器是一种以电机为驱动力的控制系统,它通过控制电机的位置、速度和加速度,实现对机械系统的精确控制。
伺服驱动器通过添加反馈设备可以获得更高的精度和控制稳定性。
近年来,单片机DSP被广泛采用来设计和研究伺服驱动器系统。
首先,单片机DSP具有高性能和灵活的处理能力,可以满足伺服驱动器对控制精度和实时性的要求。
采用DSP可以控制电机的位置、速度和加速度,并且可以实现开环控制和闭环控制。
在开环控制中,控制系统通过给电机施加恒定的电压或电流,来控制其位置、速度和加速度。
在闭环控制中,系统通过添加反馈设备来检测电机的位置、速度和加速度,实现更高精度和更稳定的控制。
其次,单片机DSP具有高度集成化和可编程性,可以实现灵活控制策略。
采用DSP可以实现各种控制策略,比如比例-积分-微分(PID)控制、模糊控制和自适应控制等。
PID控制通过对误差、积分和微分信号进行加权和求和,来控制电机的位置、速度和加速度。
模糊控制通过使用模糊逻辑来处理输入和输出,来实现更完善的控制。
自适应控制通过分析系统的反馈信号,来调整控制参数,以达到更好的控制效果。
最后,单片机DSP具有高度可靠性和易维护性,可以提高伺服驱动器的系统可靠性。
采用DSP可以实现故障保护和诊断功能,比如过流保护、过热保护、失速检测等。
在系统发生故障时,DSP可以给出警报并采取相应的保护措施,以保证系统的安全运行。
同时,DSP还可以通过上传和下载程序实现系统的升级和维护。
综上所述,单片机DSP在伺服驱动器中的设计和研究具有重要的意义。
它能够实现高性能和灵活的控制,满足伺服驱动器的高精度和实时性要求。
同时,它具有高度集成化和可编程性,可以实现灵活控制策略。
最重要的是,它具有高度可靠性和易维护性,提高了系统的可靠性和稳定性。
在未来的发展中,随着DSP技术的不断进步和应用价值的不断提升,相信单片机DSP会在伺服驱动器中扮演着越来越重要的角色。
基于单片机的伺服电机控制系统设计

• 146•基于单片机的伺服电机控制系统设计郴州职业技术学院 张玲玲当今社会,电动机在工农业生产、人们日常生活中起着十分重要的作用。
其中,步进电机是最常见的一种控制电机,在各领域中:如加工中心,打印机、自动化生产线等等场合都可以得到应用。
研究伺服电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
本系统是基于80C51的伺服电机控制系统,在脉冲控制控制作用下控制电机运行于0-3000转/分钟,并实现正转与反转。
1 引言在自动控制系统中,伺服电动机作为执行元件,作用是把所收到的电信号转换成电动机轴上的角位移或角速度输出。
它有直流电机和交流电机之分。
其中交流伺服有更广的适用性。
交流伺服系统已成为当代高性能伺服系统的主要发展方向。
本文介绍如何使用C8051F060来控制交流伺服电机,使电机运行于0-3000转/分钟的任意转速。
2 系统设计图1所示是伺服电机控制系统,它以C8051F060为核心,同时还有显示电路、编码器、编码器处理电路、RS485通信电路、伺服电机驱动电路、伺服电机。
图1 伺服电机控制系统图3 电路及原理3.1 主芯片介绍C8051F060是Silicon Lab 公司出品的完全集成的混合信号片上系统型MCU 。
它使用了Cygnal 专利的高速、流水线结构以及与MCS-51指令集完全兼容的CIP251微处理器内核。
C8051F060具有P0-P7,共计8个端口,64个可以实际使用的IO 。
3.2 LED电路如图2所示,系统使用6个LED 数码管显示伺服电机的转速,LED 数码管采用MC14489芯片进行驱动,MC14489采用SPI 通信方式和CPU 进行通信,可以节省IO 口的使用。
3.3 编码器及处理电路系统采用多个BCD 拨码开关来设置系统运行参数。
BCD 拨码开关是十进制输入,BCD 码输出,又称为8421拨码开关。
每位BCD 拨码开关可输入1位10进制数。
每个BCD 拨码开关后面有5个接点,其中C 为输入控制线,另外4根是BCD 码输出信号线。
219335444_基于STM32单片机+X7043的四轴伺服控制器设计
物联网技术 2023年 / 第6期1000 引 言随着智能制造业的发展,传统意义上的运动控制系统难以满足当今数控加工行业的发展要求[1]。
传统的数控加工系统通常采用固定式的控制模式,并且控制系统稳定性差、出错率高、控制精度较低,一旦控制系统出现故障,难以维护,严重影响生产效率[2]。
因此,研发一套具有高精度、高稳定性、高可靠性的伺服控制系统对智能制造领域具有重要的意义。
随着微电子技术和计算机技术的快速发展,运动控制系统逐渐趋于智能化、微型化、标准化等方向发展[3]。
由于工业生产领域的自动化程度越来越高,采用专用运动控制芯片的微型化控制系统逐渐成为新的发展趋势。
通过专用运动控制芯片发出控制脉冲,经过驱动器进行处理后送至伺服电机,完成伺服运动控制。
这种微型化的运动控制模式已经在智能制造领域占据主导地位[4]。
针对工业制造领域中传统运动控制系统稳定性差,控制精度低等问题,这里设计一种基于单片机+专用运动控制芯片的四轴伺服控制器。
STM32单片机采用STM32F412RE ,专用运动控制芯片采用Kyopal 公司研发的X7043[5-6]。
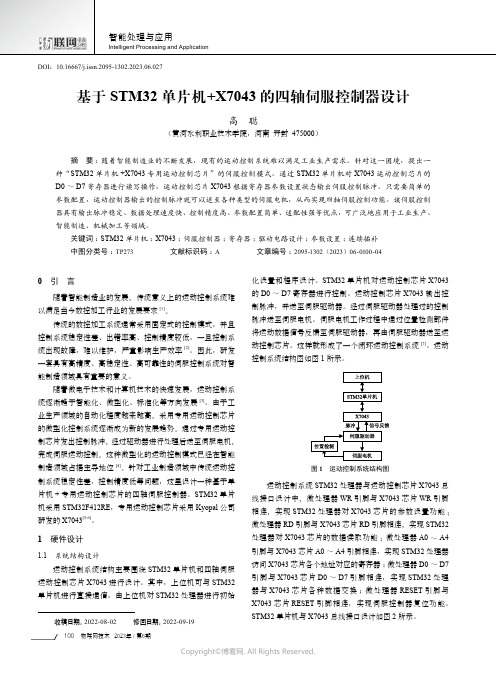
1 硬件设计1.1 系统结构设计运动控制系统结构主要围绕STM32单片机和四轴伺服运动控制芯片X7043进行设计。
其中,上位机可与STM32单片机进行直接通信,由上位机对STM32处理器进行初始化设置和程序设计。
STM32单片机对运动控制芯片X7043的D0~D7寄存器进行控制。
运动控制芯片X7043输出控制脉冲,并送至伺服驱动器。
经过伺服驱动器处理过的控制脉冲送至伺服电机。
伺服电机工作过程中通过位置检测部件将运动数据信号反馈至伺服驱动器,再由伺服驱动器送至运动控制芯片。
这样就形成了一个闭环运动控制系统[7]。
运动控制系统结构图如图1所示。
图1 运动控制系统结构图运动控制系统STM32处理器与运动控制芯片X7043总线接口设计中,微处理器WR 引脚与X7043芯片WR 引脚相连,实现STM32处理器对X7043芯片的参数设置功能;微处理器RD 引脚与X7043芯片RD 引脚相连,实现STM32处理器对X7043芯片的数据读取功能;微处理器A0~A4引脚与X7043芯片A0~A4引脚相连,实现STM32处理器访问X7043芯片各个地址对应的寄存器;微处理器D0~D7引脚与X7043芯片D0~D7引脚相连,实现STM32处理器与X7043芯片各种数据交换;微处理器RESET 引脚与X7043芯片RESET 引脚相连,实现伺服控制器复位功能。
23STM32控制伺服电机运动程序设计

23STM32控制伺服电机运动程序设计为了实现对伺服电机的运动控制,首先需要确认伺服电机的工作原理和接口,一般伺服电机的控制信号分为脉冲信号、方向信号和使能信号。
接下来,我们将详细介绍如何使用STM32控制伺服电机的程序设计。
步骤1:准备工作
首先,需要准备以下硬件和软件:
1.一台装有STM32单片机的开发板;
2.一个支持伺服电机的驱动模块;
3.一个伺服电机;
4. STM32CubeMX软件,用于生成基本的代码框架;
5. Keil MDK集成开发环境,用于编写和调试代码。
步骤2:设置GPIO引脚
在STM32CubeMX软件中,选择适当的GPIO引脚作为控制伺服电机的信号线。
一般选择一个输出引脚作为脉冲信号,一个输出引脚作为方向信号,以及一个输出引脚作为使能信号。
根据伺服电机的要求,设置引脚的输出模式和初始值。
步骤3:配置定时器
伺服电机一般需要一个精确的脉冲信号来控制其运动,因此我们需要配置STM32的定时器来生成精确的脉冲信号。
在STM32CubeMX软件中,配置一个定时器,并设置其工作模式和脉冲信号的周期和占空比。
步骤4:编写控制代码
在Keil MDK中编写控制代码。
首先需要初始化GPIO引脚和定时器,然后编写控制函数来生成脉冲信号、方向信号和使能信号。
控制函数根据需求来控制伺服电机的运动方向和速度,可以通过调整脉冲信号的周期和占空比来控制电机的转速。
步骤5:调试和优化
总结:。
基于单片机的交流伺服电机控制研究
基于单片机的交流伺服电机控制研究【摘要】设计一种单片机控制下的交流伺服电机转速系统,详细介绍它的硬件组成原理及其软件实现过程,实现了对通用交流伺服电机的速度闭环控制。
通过对实验结果的分析可以看出,本设计基本达到了系统对伺服电机转速控制的要求。
【关键词】单片机交流伺服电机由于交流伺服电机具有体积小、重量轻、大转矩输出、低惯量和良好的控制性等优点,因此已被广泛应用于自动控制系统和自动检测系统中。
在自动控制系统中,交流伺服电机的作用是把控制电压信号转换成机械位移,也就是把接收到的电压信号转变成该电机的一定转速或角位移,因此可以用单片机实现对伺服电机的控制。
1 总线驱动、数据、地址锁存及译码电路由于单片机的数据线和低位地址线共用必须加地址锁存器进行低位地址锁存,使用74L5373作为地址锁存器,当应用系统规模过大,扩展所接芯片过多,超过总线的驱动能力时,系统将不能可靠工作,此时应加用总线驱动器来减少读数据的持续时间,使用74LS245作数据驱动器整个系统可扩展的外部数据总共为64K,由于单片机外部数据存贮器和I/O是统一编址的,我们将低32K作为外部扩展的数据存储器,高译码电路采用两片74LS138用了32K作为I/O使用或留给以后扩展用74LS21,74LSll构成。
控制系统采用P89C58单片机作为控制系统处理器,该系列单片机默认1T 模式,运算速快,片上集成1280字节RAM,60K的flash程序存储器,还有EEPROM,可使系统结构更为简单、实用电机选用的是松下的MSMD5AZG1U 型交流伺服电机,额定输出功率50W,内置20位的增量式光电编码器。
驱动器选用的是松下的MINASA5系列交流伺服驱动器MADHT 1505E。
伺服驱动器连接器X4(50脚)作为外部控制信号输入、输出接口,可以接收控制器发送给驱动器的控制指令。
交流伺服电机的控制方式有三种:位置控制、速度控制、转矩控制。
在位置控制模式下,驱动器接收单片机的位置控制指令信号,经电子齿轮分倍频后,在偏差可逆计数器中与反馈脉冲信号比较后形成偏差信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ISSN1008-9446 CN13-1265 T E承德石油高等专科学校学报Jou rnal of Chengde Petro lecum Co llege第5卷第3期,2003年9月V o l.5,N o.3,Sep.2003基于单片机技术的伺服转台控制器的设计邹振春Ξ,邓立新,庄茂兰(承德石油高等专科学校电气与电子系,河北承德 067000)摘要:主要介绍了基于单片机技术的两片式伺服转台控制器的设计与实现。
应用W S I公司的单片机现场可编程外围芯片PSD301和80C196KC组成的两片式数字伺服转台控制器可以简化单片机应用系统的设计,提高了系统的可靠性。
实际运行表明系统运行稳定,能够满足实际工作要求。
关键词:PSD 单片机最小系统 控制器中图分类号:T P273 文献标识码:B 文章编号:100829446(2003)0320051204D esign of Servo Turn table Con troller on Si ngle-ch ip TechnologyZ OU Zhen2chun,D EN G L i2x in,ZHU AN G M ao2lan(E lectrical ancl E lectron ic D ep artm en t,Chengde Petro leum Co llege,Chengde067000,Ch ina)Abstract:T h is p ap er deals m ain ly w ith how to design and realize the servo tu rn tab lecon tro ller on single2ch i p techno logy.W e app ly PSD301ch i p,a field p rogramm ab le p e2ri p heral one(W S I Co.),and80c196KC,thu s w e have p redigested the design of single2ch i p app licati on system s and enhanced the reliab ility of the system.T he actual state ine2icates that the system run s w ell and has fine stab ility.In a w o rd,it can satisfy the actualtechno logy dem ands.Key words:PSD;single2ch i p m in i m um system;con tro ller 随着计算机技术和现代微电子技术的迅猛发展,由微处理器组成的数字控制系统已经广泛地应用于国民经济和国防工业中。
单片式数字控制系统的外围接口元件一般由功能单一的专用芯片或分立元件组成,这无形给系统的小型化和低功耗带来了不小的麻烦;同时由于器件较多,印制板的层数较多,系统的稳定性和可靠性也较差。
一般的解决办法是选择含有片内程序存储器和尽量多外设的M CU,但这种方法,一方面造价昂贵,另一方面所获得的存储器的空间一般都比较小,若再外扩存器则得不偿失。
另外一种方法就是采用可编程单片机通用外围接口芯片,将单片机所需的多个外围器件集成在一个外围芯片内,从而实现了用户只用两个芯片即可组成一个实时的单片机应用系统。
美国W S I公司生产的PSD器件就是一种可以实现上述功能的一种芯片。
1 PSD器件主要特性及管脚的功能描述在嵌入式控制系统中,通常采用8位或16位的微控制器,外加一些存储器、PLD和I O端口来组成相应的控制系统,基于这样的应用需要,W S I公司采用他们自己的专利分离门C M O S EPROM技术,生产了一种高性能的现场可编程的微控制器外围集成电路,该系列产品将EPROM,RAM,PLD,地址Ξ收稿日期:2003206218作者简介:邹振春(19622)男,河北涿州市人,承德石油高等专科学校电气电子系副教授,工学硕士,从事自动控制及智能仪表方向的教学及研究工作。
锁存器和I O 口集成在单一的芯片上。
现在主要有PSD 3XX 系列、PSD 4XX 系列、PSD 5XX 系列、PSD 8XX 系列、PSD 9XX 系列等。
本文主要讨论PSD 3XX 系列中的PSD 301。
1.1 PSD 301的主要特性(1)有19个可单独配置的I O 引脚,可用作微控制器的I O 扩展端、可编程地址译码器I O 、锁存器地址输出、漏极开路或C M O S 输出。
(2)两个可编程阵列(PDA A 和PDA B ),共有40个乘积项和多达12个输入及24个输出,地址译码空间可达1M B ,有逻辑重建功能。
(3)适应多种不同配置的微控制器芯片,可选的8位或16位数据总线宽度,AL E 和R eset 管脚极性可编程,对读写控制总线可选择为RD W R 或R W E 。
(4)256K 位的U V EPROM ,可配置为32K ×8或16K ×16,访问时间(包括输入锁存和PAD 地址译码)可达90n s 。
另外还集成有16K 位的静态RAM ,可配置为2K ×8或1K ×16的RAM 空间,访问时间(包括输入锁存和PAD 地址译码)也可达90n s 。
(5)具有片内加密功能,可对PSD 301和PAD 译码加密。
1.2 PSD 301所支持的微处理器PSD 301存储器的接口可配置成为8位或16位数据宽度,读写控制总线的方式可选,又可以多路复用和非多路复用地址 数据总线,因此具有很宽的配置选择的范围,可以很方便地与多种8位或16位微处理器接口。
它支持的微处理器有M o to ro la 、In tel 、Ph ili p s 、T i 、Zilog 等公司的8位或16位的微处理器。
1.3 PSD 301的管脚的功能PSD 301的输入引脚AD 0-AD 15,是地址数据复用线,通过锁存器进入PSD 。
这些锁存器可编程为锁存地址 数据输入。
PSD 301共有19个I O 引脚,分别属于端口A 、B 和C 。
端口A 和B 均可编程为一般的输入输出口,也可通过端口重建,使A 口作为低八位地址线输出,B 口作为片选输出CS 02CS 7。
C 口只有3位,可被分别设计成PAD 译码输出或A 16~A 18的地址输入或这两者的组合。
2 PSD 器件在16位单片最小系统中的应用高集成度的单片机现场可编程外围芯片PSD 301在单片机系统中的应用,使得单片机最小系统变得很简单,原来需要7、8片器件才能实现的最小系统,现在仅需要两片芯片就可以完成,图1为二者的比较图。
这样简化了系统的电路设计,缩短了产品的开发周期,节省了印制板的空间,增加了系统的可靠性;另外加密了应用程序,也保护了开发人员的劳动成果。
对于较大的系统,可以配置多个PSD 器件,从而达到扩张系统存储容量、I O 端口或增加总线宽度的目的。
另外,PSD 的现场可编程性,也保证了系统设计更改的灵活性。
图1 单片机最小系统结构比较・25・ 承德石油高等专科学校学报 2003年第5卷 第3期3 PSD 器件在伺服转台控制器中的应用伺服控制转台主要是通过CPU 控制伺服电机实现正弦规律的转动来带动转台旋转,从而来测试陀螺和其他定向设备的性能。
系统硬件组成框图如图2所示。
图2 伺服转台硬件组成框图3.1 M CU 最小系统M CU 是本系统的核心部分,完成对输入指令以及位置信号、过流信号的采样以及处理,另外还通过PWM 方式实现对伺服电机的驱动,使得电机根据设定的幅值和频率要求按正弦规律运行。
本系统采用了In tel 的80C 196KC 单片机,80C 196KC 属于16位单片机,是In tel 公司CHM O S 中的第二代产品,其性能优良价格适中,CPU 没有采用常规的累加器结构,而采用寄存器阵列结构,CPU 可以直接向488字节的寄存器进行操作,消除了累加器的瓶颈效应。
另外80C 196KC 还集成了非常丰富的外设装置和功能,如中断系统、3个PWM 输出,8路10位A D 转换器,高速输入、输出口等其他资源,因此特别适用于实时性要求较高的各种自动控制系统。
按传统的方法,这套系统由80C 196KC 最小系统组成,需外加EPROM 和RAM 以及I O 口,8~12片芯片,而由PSD 301和80C 196KC 组成,仅两片芯片就可组成一个最小系统。
3.2 计数及方向判别电路的设计光学编码器可用来测量一个旋转设备的位置。
它的输出是脉冲信号,因此可以用简单的方法转换成数字量,向微处理器提供位置信号。
增量式光学编码器能够产生2个脉冲序列,A 相脉冲和B 相脉冲,从而给出增量式的位置信号。
我们可以用简单的外部逻辑电路由A 相和B 相波形译出位置计数信息和转动方向信息,具体电路可参照文献[3]。
80C 196KC 中的T I M ER 2是一个16位外部时钟触发的向上 向下计数器,在输入信号的上升沿和下降沿都产生计数。
定时器2有2个输入引脚,T 2CL K (R 2.3)是外部时钟输入管脚,T 2U PDN (R 2.6)是计数方向控制脚。
T 2U PDN =1时,向下计数;T 2U PDN =0时,向上计数。
显然,我们将光学编码器的外部电路译出的计数信号和方向判别信号作为T I M ER 2的两个输入,从而利用定时器2实现位置信号的监测。
3.3 电机转速的控制为了保证转台在不同频率下按正弦规率运行和系统良好的频响特性,我们选取了低转动惯量的直流力矩电机以及双极式H 型可逆PWM 驱动电路。
PWM 信号直接取自80C 196KC 的PWM 信号。
・35・邹振春,等:基于单片机技术的伺服转台控制器的设计80C 196KC 的PWM 输出单元有一个8位计数器,每个状态周期计数增1,采用预分频时,每两个状态周期计数增1。
当计数器的计数为零时,PWM 输出变高;当计数值与PWM CON TROL 寄存器的值吻合时,PWM 输出变低。
当采用12M 晶振,没有预分频时为23kH z ,采用预分频时为11.7kH z 。
4 系统软件设计本系统的控制任务包括:跟踪电机的位置和方向,控制电机的转速和方向,检测过载运行状态等。
主程序对软硬件初始化后,复位电机,然后采样键盘输入状态,计算转台的运行频率,设定软件定时常数,最后进入待机方式。
系统的各种控制任务是以中断方式实现的,发生中断时,就唤醒CPU ,进入正常工作方式。
在中断服务程序中主要是按照正弦输出的要求,通过查表的方式依次将正弦波的离散数值装入PWM 的寄存器,实现电机转速的正弦变化。