测试转台伺服系统方案
三轴陀螺漂移测试转台台体动力学建模及控制系统设计
1 三 轴转 台动 力学分析 的理论依 据 三轴 转 台是一 个复杂 的 多框 架 结构 ,通过气 浮轴承 将 各框架 连接 起来 ,在 台体设计 时 已在可 能 的范
围内赋予了台体结构以最大 的刚度,对这样一个结构进行动态分析有 以下三种方法:① 用有限元理论
对 结构进行 动 力学 分析 :② 用 实验 的方法对 系统 在 已知激 励 下 的响应 数据进 行分 析 ,如对 结构 进行 锤 击 实验 :③ 将 以上 两种 方法相 结合 ,用 实测数 据修 正有 限元 模 型, 然后进 行分 析 。
L UO i g CHE P n , ANG a g x o g J , n N ig W Gu n - i n
( e at n o C nrl n i e n , abn ntue f eh oo y H bn10 0 , hn ) D pr met f o t E gn r g H ri Istt o T cn lg , a i 5 0 1C ia o ei i r
6 5
服 系 统最为 不利 的相对位 置条 件下 进行分 析 的,如 图 1 示 。 所 台体动 力学分 析 的精 度 , 决 于有 限元建模 的精度 ,而有 取 限元建 模的 精度取 决于对 建模对 象 的理解 。 面对 转 台几个主 下
要 的建 模 问题进行 论述 :
① 气 浮 轴承 的有 限元建模 将气 浮轴 承简化 为一组 弹簧进 行研 究 , 体建模 时将 其简 具 化 为杆 单元 。杆 单元分 二组 ,分别 支撑 在轴承 的两 端 的回转 中 心 上 和 台体 上 ,杆 的参数可 以通 过 计算确 定 。方法 如下 :
L ' — i m rfts bei teb s eino o t l y t m. Ie a s u ex g y d t e t l a i d s f n r se i t a sh c g c os
仿真转台用电液伺服系统低速性研究及实现

是静 、 动力 矩之差 , 差 值越小 越好 。减 小液 压 马达摩 擦
特 性 主要是 液压 马达 密封结 构 的设计 和 密封材 料 的制 作 。液压 马 达密封 的好 坏 不 仅影 响其 摩 擦 特 性 , 而且 也 影 响马达 的泄 漏 情况 , 进 而影 响马 达 的性 能 。在 摆 动 式马达 研制 过程 中 , 通过 多 次 设 计 、 实 验 和 改进 , 设
的不断 发展 , 对 飞行 器 和 制 导武 器 性 能 要 求 也 不 断 提 高, 同时 陨性测试 设 备性 能也 随之 提高 I 4 。
仿 真转 台最 重要 的性 能指 标— — 高精 度 、 高频 响 、 宽 调速 和超 低速 。J 。仿 真转 台的低 速性 不 仅是 仿 真
1 仿真 转 台低 速 性 能的研 究及 实现
我们 将 通过下 几个 方 面对 液压 转 台 的低 速性 进行
分 析
作者简介 : 曲展龙 ( 1 9 8 8 一) , 男, 山东威海人 , 硕 士研究生 , 研
究方 向: 流体传 动及 控制。
5 2
液压与 气动
2 0 1 3年第 9期
Байду номын сангаас
系统 的低 速性 , 但 是 仿真转 台一般对 动态 特性 要求 高 , 有较 大 的速 比和频 响 等 , 齿 轮 啮合 间隙 以及 齿 面磨 损 不但影 响 动态 特 性 , 对 精 度 也有 较 大 的影 响 J 。综 合 考虑转 台各项 性 能指 标 的影 响 , 选 择直 接 驱动 方 式 , 其 驱动元件 的低 速性能对 系统低速性起着 决定性 的作 用 。
基于MSComm控件的伺服转台测试软件设计

底 层设 置 , 因而较为 繁琐 , 以实 现 。组件 技术 的 难 出现 , 大 的改 善 了对该 接 口的编 程 , i a B s 极 Vs l ai u c
( B) 供 了专 门进 行 串 口通 信 的控 件 Mi oo V 提 c sf r t C m n a o s MS o 0 mu i t n( C mm) 能方便 地处 理 各 种 通 ci , 信 事 件 和 错 误 。MS o 串 口控 件 , 义 了儿 乎 C mm 定 所有 与串 口相关 的 事件 、 方法 、 性 。程序 实 现简 属 便, 代码 易于维 护 , 且 V 而 B具有 强大 的图形功 能 , 能够迅 速快 捷 地将 通 信 数 据 转 化成 表格 或 图形 , 直观地表 示 数 据 波 形 。 因而 , 就 成 为 串 口的一 它
文献标 识码 : A
Dein o si g S fwa efr S r oP a o ms sg fTet o t r o e v l t r n f Ba e n M S mm n r l sd o Co Co t o
LlHao.YAN ng Pe
Ab ta t To s e d u e ts fwa e d v lpme o e v l t r s r c : p e p ts o t r e eo nt rs r op af ms,h sp p rp e e t e i n t a d pt t e f o t i a e r s n sa d sg h ta o s h MS mm o to fVB wi e a o , ih c n b s d smp y a d c n e in l o d v lp s ra o o Co c n rlo t s r lp ns wh c a e u e i l n o v ne t t e e o e lp nsc m- h i y i
小型光电伺服转台的设计及误差分析
个模块之间采用精密轴系配合确保转台精度。另 外,采用快速联接、分解措施以便安装、运输。
俯仰模块由U型架、精密传动轴系,驱动电机、 测速电机、测角元件、目标探测器(电视跟踪仪、 激光测距机、红外探测器)、标校望远镜、水准器 组成。
在设计中将俯仰驱动电机、测速电机和测角元 件直接套轴安装,固定在U型架的两侧(如图1),
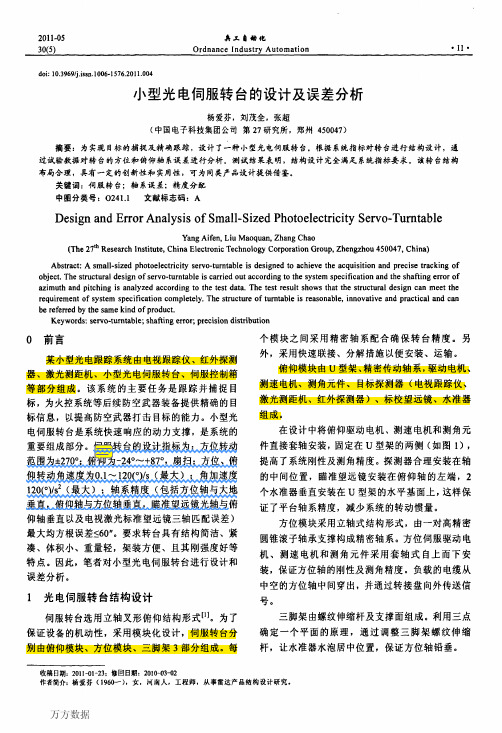
误差值/ (”)
-24 一14
-6
翟一
图2误差变化曲线
以水平仪读数为纵坐标,方位角为横坐标,做 出误差变化曲线(a),对测得的误差曲线作一最佳吻 合的正弦曲线Y=18.2sinx一8.9(使两者的均方根误 差最小)(b)。2条曲线的偏差就是方位轴的实际晃
第5期
杨爱芬,等:小型光电伺服转台的设计及误差分析
关键词:伺服转台;轴系误差;精度分配 中图分类号:0241.1 文献标志码:A
Design and Error Analysis of Small..Sized Photoelectricity Servo..Turntable
Yang Aifen,Liu Maoquan,Zhang Chao (The 27”Research Institute,China Electronic Technology Corporation Group,Zhengzhou 450047,China)
201l-05 30(5)
兵工自动化 Ordnance Industry Automation
doi:10.3969/j.issn.1006·1576.2011.004
小型光电伺服转台的设计及误差分析
杨爱芬,刘茂全,张超 (中国电子科技集团公司第27研究所,郑州450047)
摘要:为实现目标的捕捉及精确跟踪,设计了一种小型光电伺服转台。根据系统指标对转台进行结构设计,通 过试验数据对转台的方位和俯仰轴系误差进行分析。测试结果表明,结构设计完全满足系统指标要求。该转台结构 布局合理,具有一定的创新性和实用性,可为同类产品设计提供借鉴。
转台设计指导书

我们为您定制个性化转台,满足您一切需求
购买转台请发E-mail:wangyi#(#换成@)
第1章 转台总体设计
1.1 转台结构类型选择
转台是一种重要的地面测试设备,用于惯性导航系统和惯性元件检定、标定,以及模拟 飞行器姿态运动。 转台根据用途可分为仿真转台和惯性测试转台。但目前两个类别间互相渗透的趋势愈发 显著, 界限日趋上移,直到中高端产品才区别明显。 惯性测试转台,侧重静态或稳态性能,主要用于惯性导航系统和惯性元件如陀螺、加速 度计的性能检测和标定。先进武器系统一般配备有惯性导航和制导系统, 这类装置在生产、 调试、测评、使用、维护(修)等各个阶段都离不开由惯性测试转台组成的测试系统。因此, 惯 性测试性能的好坏, 直接影响武器系统研制水平及其性能评定。 仿真转台,侧重动态性能,仿真转台一般用于武器平台或运动载体的运动状态模拟 , 是 各类武器平台进行半实物仿真试验等地面综合性试验系统的关键设备和重要组成部分, 也是 测试、评价和标定各类运动载体、武器系统性能的经济、高效的技术手段。 转台按照不同的分类标准有多种类型。
购买转台请发E-mail:wangyi#(#换成@)
转台设计 课程设计指导书
哈尔滨工业大学
2011 年 4 月
我们为您定制个性化转台gyi#(#换成@)
目 录
第 1 章 转台总体设计 ....................................................................................................................... 1 1.1 转台结构类型选择 ................................................................................................................... 1 1.1.1 按机械台体结构分类......................................................................................................... 1 1.1.2 按转台回转轴数量分类..................................................................................................... 2 1.1.3 按转台驱动元件类型分类................................................................................................. 5 1.1.4 按转台轴承分类................................................................................................................. 5 1.2 转台驱动元件选择 ................................................................................................................... 6 1.3 转台测量元件选择 ................................................................................................................... 7 第 2 章 转台机械结构设计 ............................................................................................................... 8 2.1 轴系设计 ................................................................................................................................... 8 2.1.1 轴承选择与固定................................................................................................................. 9 2.1.2 轴承的安装与预紧........................................................................................................... 10 2.2 轴与框架的连接 ..................................................................................................................... 10 2.2.1 胀紧套尺寸选择............................................................................................................... 12 2.2.2 胀紧套安装拆卸与防护................................................................................................... 14 2.2.3 胀紧套结合面的配合....................................................................................................... 14 2.3 框架设计 ................................................................................................................................. 14 2.4 配重设计 ................................................................................................................................. 17 2.5 限位与锁紧装置设计 ............................................................................................................. 17 第 3 章 转台驱动元件设计 ............................................................................................................. 19 3.1 传动部件设计 ......................................................................................................................... 19 3.2 转动惯量计算 ......................................................................................................................... 19 3.3 电机力矩计算 ......................................................................................................................... 21 第 4 章 转台测量元件设计 ............................................................................................................. 24 4.1 角度传感器设计 ..................................................................................................................... 24 4.1.1 旋转变压器....................................................................................................................... 24 4.1.2 感应同步器....................................................................................................................... 26 4.1.3 光电码盘........................................................................................................................... 27 4.2 角速度传感器设计 ................................................................................................................. 28 4.3 限位开关设计 ......................................................................................................................... 30 4.4 走线与滑环 ..................................................................................................................... 31
采用xPC实现转台的位置伺服系统

收稿日期:2004-01-14;修回日期:2004-06-21。
作者简介:翟坤(1979-),男,博士研究生,主要研究方向为飞行器动力学建模与控制。
采用xPC 实现转台的位置伺服系统翟 坤,杨 涤,刘振刚,曲 溪(哈尔滨工业大学,黑龙江哈尔滨150001)摘 要:采用Matlab 的Simulink 组件设计了转台的位置伺服系统,并进行数学仿真验证。
结合Matlab 的xPC 组件,搭建实时仿真平台,进行半物理仿真。
为了实现转台的位置伺服稳定无超调,引入安排过渡过程的设计方法,实验结果表明xPC 平台具有实时性,易构造,易操作等优点,设计的位置伺服系统达到了预期的效果。
关键词:位置伺服系统;安排过渡过程;实时仿真中图分类号:TP391.9 文献标识码:AApplication of xPC method to realize the turntable s position servo systemZHAI Kun,YANG Di,LIU Zhen gang,QU Xi(Department of Astronautic Engineering ,Harbin Institute of Technology,Harbin 150001,China)Abstract:The turntable s position servo system is de signed and simulated using Simulink one component of M atlab.Ba sed on xPC another component of M atlab the re al time sim ulation platform is c onstructe d a nd simulated w ith some hardw a re in the loop.In order to e nsure that the turntable s posit ion servo is stable and free of overshoot,the transition proce ss arranging method is introduced.The experim ental results indicate that xPC platform ha s the ad va ntage s of real tim e running,easy c onstructing,handy operat ing,and that the designed position servo system achieve s the expected effect.Key words:position se rvo system;transition process arranging;real t ime simulation1 引 言很多情况下,我们采用MATLAB 的Simulink 工具对设计对象的控制系统进行数学仿真验证。
基于MCU+EPLD的雷达天线转台通用伺服系统设计

1 设 计 要 求
根据 系统 的 总体 功 能与 技 战术 指 标 ,要 求转
现对关注空域的连续扫描和 目标搜索 ,并对锁定
目标 进行 精确定 位 或跟踪 u 。雷达 天线转 台属 于一 个 典 型 的机 电一 体 化 系统 ,其 基 本 组 成如 图 1 所
示
台 :( 1 )带 负载 ( 天线 ) ,转 速在 0 — 3 0 r / m i n + _
Ke y wo ห้องสมุดไป่ตู้ ds :r a d a r a n t e n n a t u r r e t ; MC U+ EP LD; r e s o l v e r — t r a n s f o r me r
O 引 言 天线 伺 服转 台 ( 下 简称 :转 台 )是 雷 达 系统
( S i c h u a n J i u z h o u E l e c t r o n i c Gr o u p C o . ,L t d . ,Mi a n y a n g 6 2 1 0 0 0,Ch i n a )
Ab s t r a c t :T he r a d a r a n t e n n a t u r r e t s e r v o s y s t e m b a s e d o n MCU+ EPL D, u s i n g r a p i d MCU a s ma i n c o n t r o l l e r ,u s i n g p r o g r a ms EPL D t o
自动化
D OI : 1 0 . 3 9 6 9/ j . i s s n . 1 0 0 9 - 9 4 9 2 . 2 0 1 3 . 0 7 . 0 1 7
基于 MC U + E P L D的雷达天线转台通用伺服系统设计
光电跟踪仪伺服系统的工程设计

河南科技上选择、硬件电路设计、研制和调试、应用软件设计、程序编制、调试、仪表结构设计。
3.仪表性能测定阶段。
测试仪表是否达到第一步设定任务。
图2介绍以上各阶段的开发工作。
三、智能型传感器的开发策略和特点1.智能型传感器的开发策略。
(1)在规定时间内设定超声波发射和回波接收的次数,并求出超声波一次传输时间的平均值。
若在规定时间内,没有收到设定的规定次数有效回波,就认为发射或接收系统异常,并给出显示信息。
(2)结合温度传感器测量当前的温度值,运用有关公式,计算出较为精确的液位数值。
(3)人机交互功能。
液晶显示可方便地观察到当前的液位值,通过按键进行选择三种工作模式。
(4)与外部通讯的功能。
2.智能型超声波液位传感器具有传统超声波传感器不具有的特点。
(1)测量精度较高,测量精度取决于智能传感器控制芯片的计数频率,通过修改计数频率可以修改测量的精度。
另外,传感器的测量精度与温度有关系,该智能型超声波传感器可进行温度补偿,提高了测量的精度。
(2)具有诊断功能。
设定超声波的在1s 接收有效回波10次,若未收到10次有效回波,认为接收或发送系统异常,给出异常信息。
(3)具有计算、补偿功能。
采用一定的算法,将10次测量的结果排序,取中间6位,求其平均值,并将温度值进行补偿计算。
(4)通讯功能。
液位信息为数字量,将数字量转变成4~20mA 模拟量输出,模拟电流量有利于传输,抗干扰能力强;将液位信息通过异步串行通讯传给上位机;以太网数据传输,实现远距离传输液位信息。
智能型传感器具有自动测量、高精度、功能扩展容易、与外部通讯功能,完全能适应工业控制体系的网络化、集成化、智能化发展的要求。
图2智能型传感器应用系统开发开始确定系统功能、性能指标单片机的选择、软硬件的划分硬件结构设计软件结构设计相关器件的选择及逻辑设计算法设计及软件流程设计样机设计加工硬件调试软件调试源程序编写软硬件联机软件固化脱机运行系统开发完成光电跟踪仪伺服系统计算机接收光电传感器送来的目标位置偏差信号,经过一定的算法运算和信号处理后,送伺服控制器驱动转台带动光电传感器,使光电传感器的光轴指向目标,达到自动跟踪目的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测试转台伺服分系统方案
1.概述:
本伺服分系统根据转台系统技术要求,主要完成控制和驱动转台方位连续可调的运动,并能定位在任意方位角。
2.主要技术指标:
转台运动范围:0~360°
转台定位精度:≤0.2°
转台运动速度:0~5°/sec
转台运动加速度:0~5°/sec2
3.系统的主要功能
系统的工作方式有待机、手动、连续转动、遥控、外控。
可完成转台的连续转动和定位,手动方式是用机箱面板上的手轮控制转台转动,外控方式是在室外用一个控制盒控制转台转动,遥控方式是其它计算机通过串口控制转台转动。
4.伺服分系统组成
伺服分系统由控制单元(ACU)、驱动单元(ADU)、轴角编码单元及安装在转台上的执行元件、测量元件和控保元件组成,如下图1所示。
图1 伺服分系统组成框图
伺服分系统可作成一个4U的全密闭机箱。
机箱面板上有操作开关、方位角度显示等。
控制单元ACU是转台控制中心。
它完成转台运动的各种控制,各种控制策略的实时实施。
轴角编码器单元将自整角同步机测到的转台转轴的角度转化为数字量,用于转台的位置显示和位置控制。
驱动单元(ADU)由功率放大、环路控制等组成,主要完成对转台转轴的执行电机进行驱动。
转台转轴的执行电机采用交流伺服电机,因其无电刷磨损问题,可靠性高,寿命长,免维护。
4.1 控制单元
控制单元是以单片机为基础,集控制、监视、计算、通讯于一体,对转台实现安全可靠的操控的控制器,它与终端的通讯采用串口通讯。
根据不同的工作方式,ACU产生相应的控制信号,通过驱动单元驱动转台运动,从而使转台转向指定角度。
ACU是操作人员进行操作的中心,具有丰富而简洁的显示和友好的操控界面。
ACU的主要工作方式为:待机,手动,连续转动,遥控,外控等。
4.2 轴角编码器
轴角的测量元件采用自整角同步机,这种角度敏感元件较之光电码盘有更高的可靠性和高低温适应能力。
轴角编码器的核心芯片采用大规模集成专用芯片RDC。
RDC主要由输入缓冲器、比例乘法器、误差比较器、相敏检波器、积分器、压控振荡器、可逆计数器、三态输出锁存器和控制逻辑等构成。
RDC 转换器集成度高、精度高、能够闭环工作,直接将来自测角元件自整角同步机的被角度调制的角度信号转换成二进制数字角度值。
轴角编码器与控制单元可集成在一个印制板上,如上图中的印制板就已包括轴角编码器。
4.3 驱动单元
驱动单元ADU将来自ACU的代表速度的信号转换成三相交流电压加给电动机。
驱动电机选用交流伺服电动机,电机轴上带有制动器。
交流伺服电动机的优点是无碳刷,无换向火花,可靠性高,寿命长。
驱动单元还包括控保电路,进行故障联锁保护。
5.工作原理
伺服分系统采用交流伺服电机驱动转台的转轴。
ACU输出模拟电
压控制ADU,ADU输出交流电压驱动交流电机转动。
ACU的工作方式主要包括待机,手动,连续转动,遥控,外控等。
当系统处于待机状态时,ACU无速度信号输出,转台就处于停止待机状态。
当计算机给出连续转动信号时,ACU接收到命令后,产生相应速度的模拟信号,输出到ADU,然后ADU驱动执行电机转动,使转台按规定的转速转动或转到指定的角度。
当系统处于遥控时,远程终端可通过串口控制ACU,使转台按规定的方式转动。
当系统处于外控时,ACU受外部的控制盒控制。
当系统处于手动时,ACU受机箱面板上的手轮控制。
6.系统计算
6.1 执行电机计算
电机输出轴的力矩与风力矩、惯性力矩、摩擦力矩及不平衡力矩等有关。
本系统暂不考虑风力矩的影响。
6.1.1 惯性力矩:
转台的转动惯量由结构尺寸及负载决,根据要求计算转台的转动惯量约为2532kg·m2,可由此计算转台的惯性力矩。
系统要求转台最大运动角加速度为5°/sec2,在设计时按10°/sec2设计,则可由转台的最大角加速度和转动惯量计算出转台的惯性力矩如下:
m N M G
⋅≈⨯⨯=4423602532210π 6.1.2 摩擦力矩及不平衡力矩:
转台的摩擦力矩及不平衡力矩由结构计算确定如下: m N m kg M L
⋅=⋅=20020 6.1.3 电机功率计算:
系统要求转台最大运动角速度为5°/sec ,在设计时按10°/sec 设计,则可由转台的最大角速度、转动惯性力矩和摩擦力矩计算出转台转动所需的功率如下:
()W M P 1418
.0360210200442≈⨯⨯⨯+=⨯=πθ
式中的0.8为传动机构的效率。
转台转动所需功率为141W ,则电机的功率可由下式计算:
W P
P O 1778.0141≈==η 式中的η为电机的效率。
根据此功率可选择相应的电机,考虑与转台的延续性,选用B-420A-31型电机,其各项参数如下表:
表1 电机参数
6.2 减速比计算
系统要求转台最大运动角速度为5°/sec ,在设计时按10°/sec 设计,而电机的最大转速为1500 rpm ,其额定转速按1000 rpm 计算,则减速器的减速比计算如下:
60010
603601000=⨯⨯=i 根据上述计算,减速器的减速比应选定在600左右,考虑转台的延续性,本系统的减速比选定为440,不仅能满足系统的转速要求,也能满足系统的转矩要求。