高速开关阀先导控制的电液位置系统设计
电液位置控制系统设计
电液伺服位置控制系统的设计与分析一、系统的设计要求设有一数控机床工作台的位置需要连接控制,进行电液位置控制系统设计。
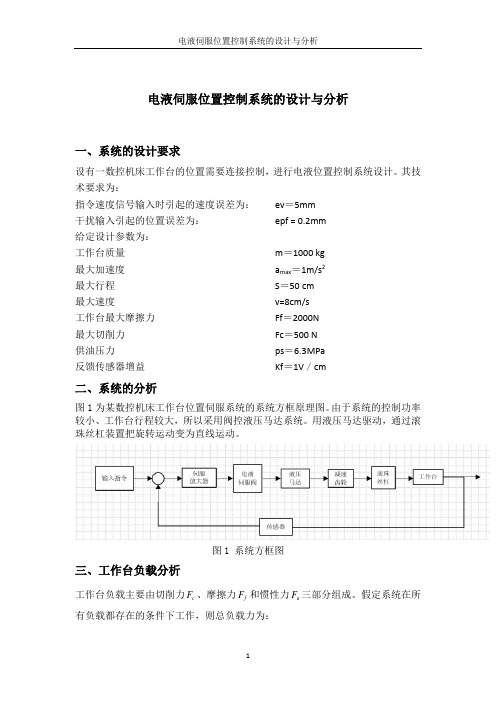
其技术要求为:指令速度信号输入时引起的速度误差为: ev =5mm 干扰输入引起的位置误差为: epf = 0.2mm 给定设计参数为: 工作台质量 m =1000 kg 最大加速度 a max =1m/s 2 最大行程 S =50 cm 最大速度 v=8cm/s 工作台最大摩擦力 Ff =2000N最大切削力 Fc =500 N 供油压力ps =6.3MPa 反馈传感器增益Kf =1V /cm二、系统的分析图1为某数控机床工作台位置伺服系统的系统方框原理图。
由于系统的控制功率较小、工作台行程较大,所以采用阀控液压马达系统。
用液压马达驱动,通过滚珠丝杠装置把旋转运动变为直线运动。
图1 系统方框图三、工作台负载分析工作台负载主要由切削力c F 、摩擦力f F 和惯性力a F 三部分组成。
假定系统在所有负载都存在的条件下工作,则总负载力为:max L c f a F F F F =++=3500N (1)四、动力元件参数选择(1) 工作台由液压马达经减速器和滚珠丝杠驱动。
根据力矩平衡方程,减速器输入轴力矩L T :/2L L T F t i π= (2)其中:t 为丝杠导程;i 为减速器传动比 液压马达最大转速max n 为:max max /n iv t = (3)其中:max v 为工作台的最大运动速度。
液压马达所需排量m Q 为6322/510m m L L Q D T p m ππ-===⨯ (4)其中:L p 为液压马达负载压力,一般取L p =23sp ,s p 为液压系统压力,m D 为液压马达弧度排量。
根据条件:i =2,t =1.2×210-m/r ,s p =63×105Pa 由式(2)、式(4)计算得:m D =0.8×610-3m /rad 所以,液压马达负载流量L q 为:536.6710/L q m s -=⨯ (5)伺服阀压降v p 为:max v s L p p p =- (6)考虑泄漏等影响,L q 增大15%, 4.6/min L q L =。
一种新型电液高速开关阀[实用新型专利]
![一种新型电液高速开关阀[实用新型专利]](https://img.taocdn.com/s3/m/6a92cd21a31614791711cc7931b765ce05087a8e.png)
[19]中华人民共和国国家知识产权局[12]实用新型专利说明书[11]授权公告号CN 2658493Y [45]授权公告日2004年11月24日[21]ZL 专利号200320110969.1[22]申请日2003.11.17[21]申请号200320110969.1[73]专利权人石延平地址222005江苏省连云港市新浦区苍梧路59号淮海工学院机械系[72]设计人石延平 [74]专利代理机构南京众联专利代理有限公司代理人王彦明[51]Int.CI 7F16K 1/00F16K 31/06权利要求书 1 页 说明书 4 页 附图 2 页[54]实用新型名称一种新型电液高速开关阀[57]摘要一种新型电液高速开关阀,它设有一个阀体,阀体内设有一个活动阀套,在活动阀套内装有阀芯,本实用新型以稀土超磁致伸缩材料作为驱动器。
该驱动器的输出位移通过杠杆机构放大后,分别驱动特殊设计的开关阀的阀芯和活动阀套相对运动,不仅使阀的过流面积增大,提高了输出流量,而且还因为阀芯阀套相对运动,提高了阀的开启或关闭切换速度。
其开启和关闭时间小于1ms。
本实用新型与现有的高速开关阀相比,由于开启和关闭切换速度提高,当应用于PWM电液数字控制系统时,能够使脉宽调制频率大大提高,从而提高了PWM的控制精度。
200320110969.1权 利 要 求 书第1/1页1.一种新型电液高速开关阀,其特征在于:它设有一个阀体(10),阀体(10)内设有一个活动阀套(9),在活动阀套(9)内装有阀芯(2),活动阀套(9)的一端为封闭端,阀芯(2)与活动阀套(9)封闭端之间设有复位弹簧(8),与阀芯(2)连接的阀杆(7)从活动阀套(9)的另一端穿出,阀杆(7)的端部穿出阀体(10)并在阀体(10)外与驱动装置连接,在活动阀套(9)封闭端的阀体(10)上设有一个驱动杆(3),驱动杆(3)穿出阀体(10)并在阀体(10)外与另一个驱动装置连接。
2.根据权利要求1所述的新型电液高速开关阀,其特征在于:所述的驱动装置为两个相同的超磁致伸缩驱动器(1)。
高速开关阀桥先导控制比例阀静动态特性分析

高速开关阀桥先导控制比例阀静动态特性分析高速开关阀桥先导控制比例阀静动态特性分析一、引言高速开关阀桥先导控制比例阀是一种常用的工业控制装置,广泛应用于气液控制系统中。
它通过改变比例阀的通道开合程度,调节流体流量,实现对系统压力、流量的精确控制。
在实际工程应用中,对高速开关阀桥先导控制比例阀的静态和动态特性进行准确的分析是非常重要的,可以帮助优化系统的设计和控制算法,提高系统的性能和稳定性。
二、高速开关阀桥先导控制比例阀的工作原理高速开关阀桥先导控制比例阀由电磁阀、比例阀和减压阀组成。
当控制信号到达电磁阀,电磁阀的动作会改变比例阀的通道开合程度,从而改变流体流量。
减压阀用来保持系统的稳定压力。
高速开关阀桥先导控制比例阀通过调节比例阀的开度来控制系统的压力和流量,实现精确的气液控制。
三、静态特性分析1. 开度-流量特性在分析高速开关阀桥先导控制比例阀的静态特性时,首先需要研究比例阀的开度与流量之间的关系。
可以通过实验方法,将不同开度下的流量进行测量,然后将测得的数据作图得到开度-流量特性曲线。
通过分析曲线的形状,可以了解比例阀的流量调节性能,确定比例阀的最大流量和最小流量。
2. 开度-压力特性另一个静态特性是比例阀的开度与系统压力之间的关系。
同样可以通过实验方法,将不同开度下的系统压力进行测量,然后作图得到开度-压力特性曲线。
通过分析曲线的形状,可以了解比例阀的压力调节性能,确定比例阀的最大工作压力和最小工作压力。
四、动态特性分析1. 响应时间高速开关阀桥先导控制比例阀的响应时间是指控制信号到达时,比例阀实际开始改变通道开合程度的时间。
通过实验方法,可以测得不同控制信号到达时比例阀的开度变化曲线,然后分析曲线上的时间点得到响应时间。
2. 稳定性分析稳定性是指系统能够快速、准确地达到设定的控制目标,并能够在一定范围内保持稳定。
对于高速开关阀桥先导控制比例阀来说,稳定性分析主要包括超调量和调节时间两个参数。
高速开关阀的设计与研究

高速开关阀的设计与研究*周福章李力千刘志玮任德志(洛阳工学院机电工程系洛阳471039)摘要介绍了一种新型的二级高速开关阀,它采用柱塞式液压增益放大结构,以高速开关电磁阀为先导级,通过二级锥阀的放大,使数字阀最大流量超过80l/min,且保持较高的切换速度,解决了大流量和快速性之间的矛盾。
阀的控制器采用PWM控制原理和降幅双压驱动技术,加速电压持续时间和工作电压幅值均可调节,优化了阀的切换特性。
叙词:数字阀高速开关柱塞式液压增益放大PWM降幅双压驱动中图分类号:TP2710前言目前的电液控制中,虽然模拟控制仍占主导地位,但是随着微机的广泛应用,人们越来越注意到数字控制系统和数字元件的重要性。
高速开关数字阀工作在“开”、“关”两种状态下,与计算机接口非常容易,且价格低廉、抗污染能力强、抗干扰性好、易于维护。
通常采用调制脉冲宽度的方法进行控制,放大器结构简单,功耗小。
国内外一些单位已开展了对其的研究工作,开发了多种结构的高速开关阀,但是都未达到推广阶段,主要原因之一就是目前研制出的一些切换速度较快的单级阀流量较小,不能满足实际工程的需要,而二级阀虽然流量大,切换速度却非常慢。
研制一种新型的高速二级开关阀解决快速性和大流量之间的矛盾就势在必行。
1二级阀工作原理图1二级阀结构原理图1.负载2.主阀芯3.弹簧14.弹簧25.控制活塞6.先导阀7.阻尼孔二级阀原理如图1所示。
当先导阀6开启,容腔3压力接近系统压力,活塞5推动主阀芯开启,当先导阀6关闭,容腔3压力下降,主阀芯推动控制活塞关闭。
采用这种柱塞式增益放大结构,二级阀在获得大流量的同时,仍有较快的切换速度。
图1中阻尼孔7将先导阀输出流量分流,其孔径大小决定了容腔3的压力,是影响主阀芯开关速度的主要参数。
两端弹簧刚度很低,仅用于初定位,对阀的开关几乎没有影响。
先导阀6采用日本不二越公司生产的高速开关电磁阀(HS-G01-AR-D1),其性能参数分别为:最高切换频率50 Hz,最大流量8 l/min,最高压力17 MPa,开启时间4 ms~6 ms,关闭时间1.5 ms~2.5 ms,控制电压12 V,最大电流2.4 A。
高速开关阀先导控制注塑机注射液压系统的仿真研究

高速开关 阀具有结构简单 、成本低 、抗污染能力 强 、工作稳定可靠 、能耗低 、响应快等优点 ,尤其是 其与微机接 口方便 ,可 以使 用计算 机进行 连续 控制 ,
这使 得 系 统 的 性 能 和 控 制 水 平 得 到 大 大 提 高 。插 装阀结构简单 ,密封性好 ,以高速开关 阀为先导级 的
Hi h-pe d o /o l e Pi t Co t o g s e n f Va v l n r l o
K N e, I ig n A G L i X E Y nj u
( t eK yL b rt yo li P w r rnm si n o t l Z e a gU i r t, Sa e aoao f ud o e Ta s i o a dC n o, hj n nv s y t r F sn r i ei H n zo hj n 0 7,C ia aghuZ ei g3 2 a 1 0 hn )
v v io o to ,wa ie ale pltc n r l sg v n. Ke a a tr ft e s se tui e itnc y p r mee so h y tm l d r ssa e,mo ulto r q n y,du yc ce,la r n lz d i d a in fe ue c t y l o d we e a ay e n AM ESm . Th i ua in r s t h w h tt eprncp eo h y t m sfa il i e sm lto e ul s o t a h i il ft e s se i e sb e, a d t epo iin c n r lo ati e v le o ei e s n h st o to fc rrdg av sc r sr— o
基于高速开关阀的液压同步控制系统设计与研究的开题报告

基于高速开关阀的液压同步控制系统设计与研究的开题报告一、题目:基于高速开关阀的液压同步控制系统设计与研究二、研究背景和意义:液压系统在工业自动化控制中广泛应用,而液压同步控制系统则是其中的重要分支。
在某些高精度加工场合中,液压同步控制系统比电气同步控制系统更为适用,因为液压系统可以克服传统机械结构无法实现的工作方式,如承受大负载、可靠性高等,因此其在模具制造、船舶制造、机床加工和航空航天等领域得到广泛应用。
传统液压同步控制系统采用多路电液伺服系统,由于其成本较高,响应时间较慢,因而难以满足高端工业市场的需求。
随着科技的不断发展,高速开关阀作为电液控制的新技术方式,其具有响应速度快、控制精度高、动态性能优良等优势,因而引起人们的关注。
本文将采用高速开关阀作为电液控制的新技术,设计一种基于高速开关阀的液压同步控制系统,以提高系统的精度和效率,满足高端工业市场的需求。
三、研究内容和技术路线:本课题旨在设计和研究一种基于高速开关阀的液压同步控制系统,具体内容包括:1. 系统结构设计采用高速开关阀作为电液控制的新技术方式,设计液压同步控制系统的结构,包括系统整体架构、液压系统设计、高速开关阀的选型和参数设定等。
2. 控制算法研究根据液压同步控制系统的特点,研究液压系统的PID控制算法、模糊控制算法等,以实现系统的高精度、高效率控制。
3. 系统性能测试对所设计的液压同步控制系统进行性能测试,包括负载能力测试、精度测试、响应时间测试、稳定性测试等,验证系统设计的合理性和可行性。
根据实验结果对系统进行优化和改进。
技术路线:1. 阅读相关文献,对液压同步控制系统的结构、控制算法、性能测试等进行深入了解。
2. 设计系统结构,并进行参数设定和选型。
3. 利用MATLAB/Simulink建立系统控制模型,进行控制算法的研究,比较不同控制算法的效果。
4. 进行实验室模型搭建,对所设计的液压同步控制系统进行性能测试,包括负载能力测试、精度测试、响应时间测试、稳定性测试等。
电液位置系统用高速电磁阀及其特性研究

different duty ratio PWM signal generation and driving mode principle do meticulous analysis, design the actual high-speed solenoid valve drive circuit, and then through the simulation results to see, realize the large current start, small current maintain technical requirements. In this paper, a new electro-hydraulic position system is established on the basis of high-speed solenoid valve. Based on the principle of the system and model analysis, it is concluded that the model of transfer function.According to its open loop transfer function for the stability of the system of the open loop gain, and use the simulation get Bode diagram and Nichols diagram, verified the stability of the system. In order to realize hydraulic cylinder of smooth start and stop, the acceleration of the piston is optimized. Then the analysis of system error sources and influence factors, in order to eliminate the electro-hydraulic position system follow error, this paper adopted the predicted control strategy, respectively from the two aspects of theory and simulation is analyzed, the simulation results show that the control method can effectively improve the electro-hydraulic position system positioning accuracy. Key Words :High-speed solenoid valve ;Static characteristic ;Dynamic response ; Drive circuit ; Electro-hydraulic position system
电液位置伺服控制系统设计方法
液压马达的最大转速为
所以负载流量为
此时伺服阀的压降为
考虑到泄漏等影响,将 增大15%,取 =3.4L/min。根据 和 ,查得额定流量为6L/min的阀可以满足要求,该阀额定电流为
5.选择位移传感器增益 ,放大器增益 确定
(三)计算系统的动态品质
1.确定各组成元件的传递函数,画出系统的方块图
电液位置伺服控制系统设计方法
电液位置伺服控制系统设计方法
电液位置伺服控制系统设计方法
电液位置伺服系统是最基本和最常用的一种液压伺服系统,如机床工作台的位置、板带轧机的板厚、带材跑偏控制、飞机和船舶的舵机控制、雷达和火炮控制系统以及振动试验台等。在其它物理量的控制系统中,如速度控制和力控制等系统中,也常有位置控制小回路作为大回路中的一个环节
2.绘制系统开环伯德图并根据稳定性确定开环增益
由方块图5绘制 =1时的开环伯德图,见图6.。然后将图中零分贝线下移至 ,使相位欲量 ,此时增益欲量 ,穿越频率 ,开环增益 1/S
由方块图5得开环增益
1/s=504 1/s
所以放大器增益为
3.求闭环系统的频宽
由图6所示的开环伯德图,通过尼克尔斯图可以求得系统的闭环伯德图,如下图7所示
(一)组成控制系统原理图
由于系统的控制功率比较小、工作台行程比较大,所以采用阀控液压马达系统。系统方块原理如图1
(二)由静态计算确定动力元件参数,选择位移传感器和伺服放大器
1.绘制负载轨迹图
负载力由切削力 ,摩擦力 和惯性力 三部分组成。摩擦力具有“下降”特性,为了பைடு நூலகம்化,可认为与速度无关,是定值,取最大值 = 1500N惯性力按最大加速度考虑
电液位置伺服系统主要是用于解决位置跟随的控制问题,其根本任务就是通过执行机构实现被控量对给定量的及时和准确跟踪,并要具有足够的控制精度。电液伺服系统的动态特性是衡量一套电液伺服系统设计及调试水平的重要指标。它由电信号处理装置和若干液压元件组成,元件的动态性能相互影响,相互制约及系统本身所包含的非线性,致使其动态性能复杂。因此,电液伺服控制系统的设计及仿真受到越来越多的重视。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(ntueo ca i l Eetcl H n nN r l nvri , hn sa 0 ,C N) Istt f i Meh nc & lc ia, u a oma U iesy C a gh 1 8 a r t 40 1 H
Ab t a t s r c :Ac o dn o t y a c c n r lh d a lc s se o e ea n i e rc a a trsi so ld c r ig t he d n mi o to y r u i y t m fg n r lno ln a h r ce it fsi e,a p e i c r c—
中图分 类号 : H1 7 T 3
De g fElc r sin o e to-h dr ul y a i Post s e Ba ed 01 c ion Sy t m s 3 i
Hih Sp e - f Vav i tCo t l g e d On of le P l n r o o
so st n n ft e h d a lc c n r ls se i e ie . Usn ih-s e d o /o av s p ltc n r l in po i o i g o h y r ui o to y tm sd vs d i ighg p e n f v l e i o to o
擦力 而造成稳 态误差 , 同时会 产 生抖动 现象 , 用 电液 但 位置伺 服系统 控制 的液压滑 台能够 满足低 速运 动时高 精 度定位 的需要 。工业 上用 于 电液 位 置控 制 系统 的核心元件 有伺 服 阀 、 比例 阀和 高速 开 关 阀等 。高 速 开关 阀 由于具 有 极 高 的 响应 速 度 、 构 紧凑 、 复 性 结 重 好、 工作耐久 可靠 、 污染 能力 强 以及 价格便 宜等诸 多 抗
优点 , 引起 了人们 的广泛关 注 和研 究 。但 是 , 由于高 速
开关 阀工作 流量偏小 , 不足 以直接 驱 动 功率 较 大 的液
压 位置控 制 系统 。因此需要 研究改 进 的办法 以使 其能 够 用于大 流量 、 大功率 的液压 位置 系统 ; 用高速 开关 采
阀先导控 制 的 方式 既可 以避 免 其 输 出流 量 偏 小 的缺 点, 同时又 能保 留其 便 于直接通 过计算 机控制 的优 点 , 是一 种很有前 途 的 、 可行 的 电液 位置控 制系统 方案 。
l i yi rs se fu d c l e y tm,i c n c n rlt e dr ci n o o o u d fo b h n i g p le wi t d l- nd t a o to h ie t ff w ff i w y c a gn u s d h mo ua o l l l t n r t ft e c nto in l nd c n r aie se l s pe d c n rl o lcr -hy r u i o iin s s i ae o h o r lsg a ,a a e lz tp e s s e o to fee to o d a lc p sto y - tr. Att e s me tme,i c n e sl e lz mo t c ee a in a e ee a in p o e s a e uc e n h a i t a a i r aie s oh a c l r t nd d c lr t r c s ,c n r d e y o o t e n ie a d i a to h y t m. h o s n mp c ft e s se Ke wor s:Hy r u i r s u e y d d a lc P e s r Mo i g P af r ; Hih—s e d vn lt m o g p e On—o l e;Pio Co r l f Vav lt nto ;Hy r u i nr l d a lc Co to
图I高速开 关阀先导控制 的 电液位置控制 系统方案原理 图
l 新型 电液 位 置 控 制 系 统 的设 计 方 案
高速 开关 阀先导驱 动 的 电液位 置控制 系统 的结构
¥ 湖 南 省教 育 厅 重 点科 研 基 金 资 助 ( 0 8 0 7 20 A 4 )
Co mm u ae Vav tt l e:El cr —h d a l o iin S se e to y r ui P sto y t m c
液压滑 台常 用 于机 床 实 现进 给 运 动 。研 究 表 明 ,
一
பைடு நூலகம்
如 图 1所示 。
般 液压系统 控制 的滑 台在定位 过程 中无法 克服 因摩
高速 开 关 阀 先导 控 制 的电 液位 置 系 统 设计
刘 忠
( 湖南 师范大 学机 电技 术装备研 究所 , 南 长 沙 4 0 8 ) 湖 1 0 1 摘 要: 针对 一般液 压 系统 控 制的动 力滑 台的非线性 特性 , 设计 能满足 高精 度定位 的液压 控制 系统 。 采用高
速开 关 阀先 导控 制的 阀控 缸 系统 , 通过 改变控 制信 号 的脉 冲宽 度调 制 率 , 以控 制液 流 的方 向和 流 可
量。 实现执行 机构 的无级调 速 , 并可方 便地 实现 平稳 的加 速和减 速过 程 。 降低 系统 冲击和 噪声 。 关键词 : 液压 滑台 高速开 关 阀 先导控 制 液控换 向 阀 电液位 置 系统