关于GPS高程测量精度的分析比较
对工程测量中GPS控制测量平面与高程精度误差的分析

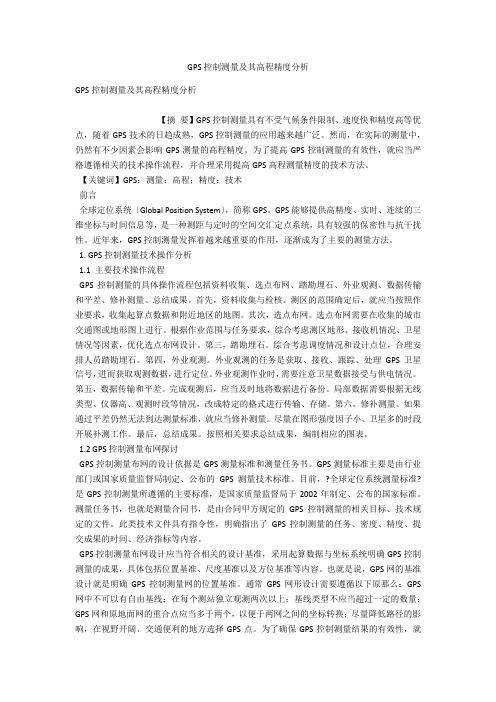
图 1 引水 工 程 币 状 E级 GP S 网田 吾图
控 制 网 中, 如果 G P S网形 比较 理 想 , 已知 点较 多并 分布 2 . 2 开发 区 E级 G P S网
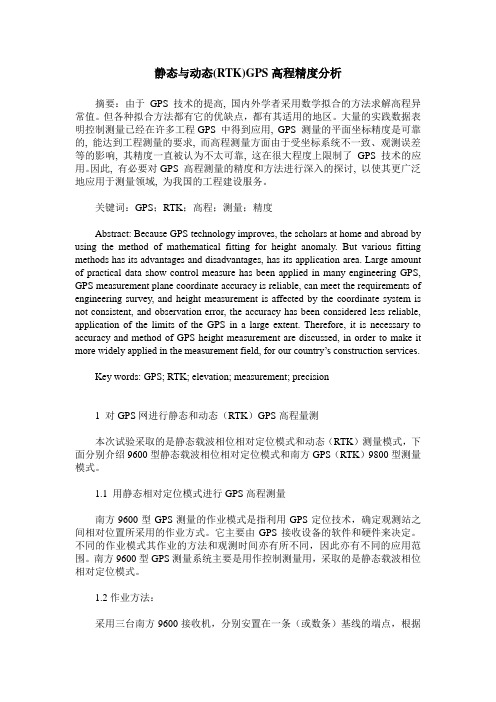
图 2和 图 3为 开发 区分 别采 用 不 同 的 已知 点 施测
精 度 问题 。但 在相 当 多的工程 测量 中, 一 般存 在采 用 的 的 E级 G P S网 , C l  ̄ C 为 C级 G P S点 ,二等 水准 高程 , 已知 点 较 少 ( 经常采用 2 - 3个 已知 点) 、 已知 点分 布 位 并作 为 起 算成 果 ; E ~ E 为 E级 G P S点 ,其 中 E 和E 为共 点 。C 。 和 C 高程 分 别 为 3 . 5 l m、 3 . 6 8 m, C 高程 为 置不 佳 、 网形 呈 带 状 、 相对高差大、 水 准 测 量 困难 或 不 进 行水 准测 量等 因素 ,这些 因素 都会 影 响到 G P S控 制 4 . 2 0 a r m, C 高程为 4 . 8 5 a r m,开 发区 高程 在 1  ̄ 2 7 5 m之
网 的精度 。本文 利 用 3个 实例 来解 析 工程 测 量 中 G P S 间。可 以看 出, 图 2的网形 结 构是 很差 的, 图 3网形 要 好些 , 但 也 不理 想 , 且 高差较 大 。将 两 次测 量 的成 果 比 控 制测 量 的平面 精度 与高 程精度 。
2 G P S控 制测量 实例
程, 精 度 为 四等 。将 G P S拟 合 高程 和水 准 高程相 比较 , G P S点 , 坐标 系 为 1 9 8 0西安 坐标 系 , 二 等水 准 高程 , 并 D 和D 为 测 区 内原有 的导 线 点 , 最大误 差 为 0 . 0 2 9 m。 这说 明在距 离不 太远 、 各 点之 间高 将 其 作 为起 算 成 果 ;
GPS控制测量及其高程精度分析
GPS控制测量及其高程精度分析GPS控制测量及其高程精度分析【摘要】GPS控制测量具有不受气候条件限制、速度快和精度高等优点,随着GPS技术的日趋成熟,GPS控制测量的应用越来越广泛。
然而,在实际的测量中,仍然有不少因素会影响GPS测量的高程精度。
为了提高GPS控制测量的有效性,就应当严格遵循相关的技术操作流程,并合理采用提高GPS高程测量精度的技术方法。
【关键词】GPS;测量;高程;精度;技术前言全球定位系统〔Global Position System〕,简称GPS。
GPS能够提供高精度、实时、连续的三维坐标与时间信息等,是一种测距与定时的空间交汇定点系统,具有较强的保密性与抗干扰性。
近年来,GPS控制测量发挥着越来越重要的作用,逐渐成为了主要的测量方法。
1. GPS控制测量技术操作分析1.1 主要技术操作流程GPS控制测量的具体操作流程包括资料收集、选点布网、踏勘埋石、外业观测、数据传输和平差、修补测量、总结成果。
首先,资料收集与检核。
测区的范围确定后,就应当按照作业要求,收集起算点数据和附近地区的地图。
其次,选点布网。
选点布网需要在收集的城市交通图或地形图上进行。
根据作业范围与任务要求,综合考虑测区地形、接收机情况、卫星情况等因素,优化选点布网设计。
第三,踏勘埋石。
综合考虑调度情况和设计点位,合理安排人员踏勘埋石。
第四,外业观测。
外业观测的任务是获取、接收、跟踪、处理GPS卫星信号,进而获取观测数据,进行定位。
外业观测作业时,需要注意卫星数据接受与供电情况。
第五,数据传输和平差。
完成观测后,应当及时地将数据进行备份。
局部数据需要根据无线类型、仪器高、观测时段等情况,改成特定的格式进行传输、存储。
第六,修补测量。
如果通过平差仍然无法到达测量标准,就应当修补测量。
尽量在图形强度因子小、卫星多的时段开展补测工作。
最后,总结成果。
按照相关要求总结成果,编制相应的图表。
1.2 GPS控制测量布网探讨GPS控制测量布网的设计依据是GPS测量标准和测量任务书。
静态与动态(RTK)GPS高程精度分析
静态与动态(RTK)GPS高程精度分析摘要:由于GPS 技术的提高, 国内外学者采用数学拟合的方法求解高程异常值。
但各种拟合方法都有它的优缺点,都有其适用的地区。
大量的实践数据表明控制测量已经在许多工程GPS 中得到应用, GPS 测量的平面坐标精度是可靠的, 能达到工程测量的要求, 而高程测量方面由于受坐标系统不一致、观测误差等的影响, 其精度一直被认为不太可靠, 这在很大程度上限制了GPS 技术的应用。
因此, 有必要对GPS 高程测量的精度和方法进行深入的探讨, 以使其更广泛地应用于测量领域, 为我国的工程建设服务。
关键词:GPS;RTK;高程;测量;精度Abstract: Because GPS technology improves, the scholars at home and abroad by using the method of mathematical fitting for height anomaly. But various fitting methods has its advantages and disadvantages, has its application area. Large amount of practical data show control measure has been applied in many engineering GPS, GPS measurement plane coordinate accuracy is reliable, can meet the requirements of engineering survey, and height measurement is affected by the coordinate system is not consistent, and observation error, the accuracy has been considered less reliable, application of the limits of the GPS in a large extent. Therefore, it is necessary to accuracy and method of GPS height measurement are discussed, in order to make it more widely applied in the measurement field, for our country’s construction services.Key words: GPS; RTK; elevation; measurement; precision1 对GPS网进行静态和动态(RTK)GPS高程量测本次试验采取的是静态载波相位相对定位模式和动态(RTK)测量模式,下面分别介绍9600型静态载波相位相对定位模式和南方GPS(RTK)9800型测量模式。
工程测量中GPS高程测量的精度分析

工程测量中 GPS高程测量的精度分析摘要:分析GPS高程测量中的影响因素,如卫星运行、公共点的精度、大地高转换误差等,并提出提高GPS高程的测量精度的技术措施。
关键词: GPS高程测量;高程精度;技术措施近年来GPS测量技术在工程测量中得到了广泛应用,GPS技术有着诸多优点,比如测量工作的时间比较短,测量定位非常快,测量的准确性比较高,在野外便携式GPS测量设备更容易进入测量现场等等。
但是,GPS控制测量技术比与传统测量方法相比,直观性较差,平面精度尚可,高程误差却较大。
故分析影响GPS测量精度的影响因素,提高GPS的测量精度有重要的实践意义。
影响高程测量精度的主要因素有:1.与卫星相关的因素。
卫星是GPS测量的信息发出点,卫星的分布、数量、稳定性对GPS测量结果的稳定性和精确度影响很大。
GPS接收机是我们最终获得测量数据的载体,其接收的稳定性、位置的偏差都会对测量的结果造成一定的影响。
当进行GPS静态定位测量时,必须要确保控制点位置的准确性,安置足够数量的接收机,确保得到的观测数据满足要求。
仔细明确卫星的截止高度角和天线高度,这些都可以在一定程度上减小甚至完全避免上面提到的影响因素,确保高程测量达到要求的高精度。
2.公共点的测量精度问题。
通常,控制测量点的大地高与高程异常值的差值就可以得到正常值。
其中高程异常值是运用数学方法拟合得到的。
要想得到高精度的高程异常值,就必须要求有高精度的几何水准测量起算点。
在测算开始前,相关工作人员选取的各个公共点在数量、分布情况上都要保持尽量的科学性,防止公共点数量过多或过少,也要防止公共点在选取过程中密度过大或过小。
3.大地高转换成正常高引起的误差。
通常,工程测量中用大地高与高程异常值相减计算出的数值可以得到正常值。
但是,高程异常会受到在计划中选取的区域内的GPS点的大地高的影响,也会受到测算出的正常高的影响。
因而,高程异常如果想要在一定范围内符合标准,那么在一开始对于公共点的各项数值进行计算时,就要保证足够的精细度。
GPS(RTK)控制测量平面及高程精度分析

GPS(RTK)控制测量平面及高程精度分析摘要:近年来随着GPS发展采用载波相位实时动态差分技术进行相对定位的GPS RTK方法,能够在野外实时地得到厘米级定位精度,可以极大地提高作业效率。
本文对GPS RTK的精度进行试验研究,利用实测数据对其校正精度进行对比分析,并探讨影响校正精度的主要因素。
关键词:GPS RTK 控制测量控制点精度1、GPS(RTK)控制测量为了确定动态GPS(RTK)控制测量的精度,笔者在哈尔滨对已布设了D级GPS控制网进行了动态GPS(RTK)测量和静态GPS测量成果的比较。
并联测了四等水准的1个D级GPS点,进行了水准测量和用动态GPS(RTK)测量高程的比较。
设计方案如下:使用南方9600 GPS接收机进行动态GPS(RTK)测量的实验。
选择3个分部比较均匀地已知点进行解算转换参数。
基准站设定在测区中央,地势较高,周围无遮挡物,对D级GPS控制网进行了动态GPS(RTK)测量,并且联测了四等水准的1个D级GPS点。
共观测了15个重复点。
本次观测采用南方9600 GPS接收机进行动态GPS(RTK)测量的实验。
1.1 对测区转换参数的确定选择3个分部比较均匀地已知点进行解算转换参数。
操作:工具→计算七参数为了获得更精确的七参数坐标转换,这时用户需要知道三个已知点的地方坐标和这三个点的WGS-84坐标,可以计算出七个参数,即WGS-84坐标转换到地方坐标的七个转换参数,用户单击确定,就会输入到七参数对话框中。
可以直接输入三个已知点的地方坐标和这三个点的WGS-84坐标,按右上方的“OK”按钮,就会计算出七参数,计算出七参数后,系统会自动打开参数开关,单击“OK”按钮,p选择下一步后,界面如下图1.4:图1.4 基准站架设在未知点(向导1)根据向导提示,输入已知坐标后,直接校正,然后开始测量。
共观测了15个重复点。
为了减少人为误差和偶然误差的影响,观测时每一个点的观测时间设定为5s,每一点观测3次,对3次观测进行了比较,当3次观测中最大和最小点位误差大于5cm时,剔除和平均值相差较大的一个,剩余的取其平均值作为最后观测成果并和静态GPS坐标、水准高程进行比较,见表1.1、表1.2。
GPS(RTK)高程精度分析
可达 l 一。在 3 0—15 0k 0 0 0 m工程 精 密定位 中 , h以 1 上观 测的解 其 平 面位 置误 差 小 于 1m 与 ME o m, 一5 0 电磁 波测距 仪测定 的边 长 比较 , 边 长较 差 最 大 为 0 其 . 5m 较 差 中误 差为 0 3m m, . m。
继 续教 育研 究
21 0 0年第 8期
j x ioy a i i uj uy nj a u l7 6
G S R K) 源 勘 测 规划 院 , 黑龙 江 哈尔 滨 10 0 ) 5 00 摘 要: 目前 , 工 程 水 准 测量 中 主要 采 用 传 统 的 方 法 建 立 高 精 度 的施 工 控 制 网 , G S高 程 却 常 常 被 忽 视 。 在 而 P
系 列 的 研 究 , 动 态 G S R K)测 量 的精 度 也 有 了~ 定 的认 识 , 一 步提 高 了观 测 精 度 和 工 作 效 率 。 对 P(T 进 关 键 词 : P ( T ; 度 ; 析 G S R K) 精 分
一
、
G S卫星定 位技 术的发 展 P
以内可达 l ~,0 5 0k 0 10— 0 m可 达 1 ~, 0 0k 以上 0 1 0 m
17 9 3年 3月 , 国国防 部批 准 它得 陆海 空 三军 联 美 合 研制新 的卫 星导 航 系统 : A S A / P 。他是英 文 N VT R G S
“Na i ain S tli mi g a d Ra gn /Glba o ii. vg to a el e Ti n n n ig t o lP sto
( ) 作简便 五 操 随着 G S接 收 机 不 断 改 进 , P 自动 化 程 度 越 来 越 高, 有的 已达 “ 瓜 化 ” 傻 的程 度 ; 收 机 的 体 积 越 来 越 接 小 , 量越来 越轻 , 重 极大地 减 轻测量 工作 者的 工作 紧张 程度 和劳动 强度 使 野外 工作 变得 轻松 愉快 。 ( ) 天候作业 六 全 目前 G S观测 可在一 天 2 P 4小 时 内的 任何 时 间进 行, 不受 刮风下 雪 等气候 的影响 。
GPS静态测量与四等水准测量高程精度对比分析
2.1 外 业 数 据 采 集 本 次试 验采 用 的是 索 佳 c3型 自动 安 平 水 准
仪 ,读 数 到 1 mm,估 读 到 0.1 mm,仪 器 的精 度 是 每 千米往 返 测 高差 中误 差 为 士2 mm.在 观测 前 对 仪 器进行 了检查 和校正 ,经检 查仪器 各项 精度 满 足 要 求可 以进 行野 外 作 业 。 四等水 准 测 量 的各项 指 标 如表 1所 示 。
ቤተ መጻሕፍቲ ባይዱ
· 74 ·
全 球 定 位 系 统
第 37卷
映 了控 制 网的真实精 度[3]。利 用三 个 四等 GPS点 高 ,最终 成果 可靠性 好 。
对完成 三维 无约束 平 差 的控 制 网进 行 二 维 约束 平 差 ,将基 线 向量归 化 到 椭 球上 ,通 过 高 斯 正形 投 影 方式 加上 1980西 安坐 标 系 的有关 参 数 ,得 到 1980
院加密 的 四等 GPS点 三个 ,这 几个 点 保存 完 好 ,点 线 后处 理结 果如 表 4所示 。
表 4 基 线 解 算 表
在 完 成 基 线 解 算 后 ,在 WGS一84坐 标 系 中 进 可 以检 核 GPS网 中是 否 含 有 粗 差 ,意 在 考察 网 的 行 三维无 约 束平 差 ,也 称 为 自由平 差 ,无 约 束 平 差 内符 合精 度 和基线 之 间是否 存在 系统 的误差 ,它 反
表 l 四等 水 准 测 量 的 各 项 指 标
注 :L为 线 路 长 度 ;
收 稿 日期 :2012—02—12 基 金 项 目 :土 地 监 管 数 据 空 间 位 置 配 准技 术研 究 (编 号 :20101lOl5 2) 联 系人 :闫建 伟 E-mail:jianwei3577776@ 163.cor n
工程测量中GPS控制测量高程精度分析
工程测量中 GPS控制测量高程精度分析摘要:随着我国现代化经济建设的发展,为了更好的满足国民生产生活需求,基础工程建设在项目体量和质量方面都有了更高的要求。
工程测量是直接影响工程精度和工程质量的关键技术环节,近年来为了提高工程测量水平, GPS测量技术也得到了一定的普及和推广。
但是在实际应用中,高程精度测量环节GPS控制和表现仍然存在一定不足,成为了相关工作人员需要深入研究的课题。
本文阐述了在工程测量中GPS测量技术的主要特性和GPS控制测量高程精度的影响因素,并对工程测量环节GPS控制测量高程精度的有效措施进行了细致分析。
关键词:工程测量;GPS;精度引言:想要对我国工程测量环节中 GPS控制测量技术高程测量精度进行分析,就需要先了解GPS控制测量技术的技术特性和概念。
所谓GPS控制测量技术,就是只通过GPS定位系统,利用宇宙空间中不断飞行的卫星结合特殊定位信息以及设备的无线电信号传输来确定位置的一种定位定向测量技术。
和传统测量方式相比,GPS控制测量技术拥有明显优势,但同时 GPS测量也并非全无缺点,需要相关操作人员在实际工作中进行把握。
1.GPS技术的主要应用特点1.操作便捷性高首先,GPS测量技术的操作便捷性很高,GPS测量时对于相邻各个测量站之间的地理环境,空间环境没有过高要求。
也不需要像传统测量时一样采取通视技术,只要保持测量位置上部空间开阔即可。
其目的是为了保障测量站和相关设备能够顺利接收信号,不会受到其他因素干扰。
这一特点也导致了GPS测量技术的费用大幅下降,测量点位选择更加灵活,显著降低了工程难度。
另外,随着当前我国的技术不断升级,GPS接收器在研究的过程中也在不断的升级,自身的智能化水平与自动化水平也在增长的过程当中。
像GPS接收器的体积会在不断的缩小,重量也在逐渐减小,为工作人员的使用提供了便利,也降低了工作人员在进行工程测量工作时的所消耗的体力。
并且GPS接收机的数据接收速度,接收质量,接收效果也在稳步提升。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
诚然 ,绿线的划定是实现绿地建设的前瞻措施 ,维护好绿线 比划定绿线更重要 ,我们要像维护红线一样 ,维护绿线的严肃性 , 力求创造出宜人 、近人 、利人的城市空间 ,实现城市的可持续发展 。 参考文献 : [1 ] 王 鹏. 城市公共空间的系统化建设 [ M ] . 南京 :东南大学
m
点数
二次多项式模型 (中误差)
拟合点
检核点
多面函数模型 (中误差)
拟合点
检核点
9
0. 025
0. 032
0. 021
0. 029
18
0. 021
0. 029
0. 015
0. 022
23
0. 034
0. 031
0. 019
0. 024
3 结语
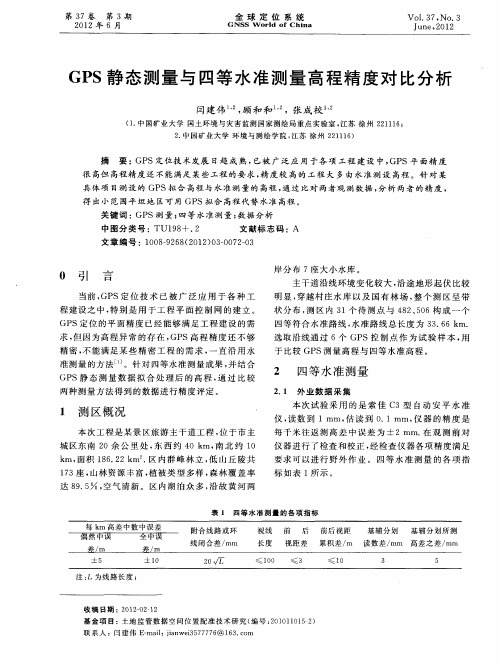
1) 对于多项式模型并非阶数越高精度就越高 ,即多项式拟合 并非随阶数的增加而无限逼近局部似大地水准面 ,一般选择阶次 为 2 是比较适合的 。
出版社 ,2002. [ 2 ] 刘 凌. 有关城市绿化与生态及节能的思考 [J ] . 山西建筑 ,
2007 ,33 (3) :3282329.
Study on the planning compilation of the city green l ine
WANG Xin L I Jian2qi
to be t he basic assurance.
Key words : green line , green space , establishment , management
收稿日期 :2008203228 作者简介 :杨 蕾 (19772 ) ,女 ,硕士 ,讲师 ,陕西交通职业技术学院 ,陕西 西安 710021
山 西 建 筑 第 34 卷 2008
第 年
25 9
期 月
SHANXI
ARC HI T EC TU R E
Vol . Sep .
34 No . 25 2008
·345 ·
·测量·
文章编号 :100926825 (2008) 2520345202
1. 2 多面函数模型
设任意一点 A ( xi , yi) 的高程异常ξi 与平面坐标有如下关系 :
n
∑ ξ =
Kj Q ( xi , yi , xj , yj)
(5)
j =1
其中 , Kj 为待定系数 ; Q ( xi , yi , xj , yj ) 为核函数 , 其中点在
( xj , yj) 处 。核函数可以任意选 ,但为了简单 ,一般都采用对称函
法须有一定精度 、分布良好的重力数据和地形数据 , 许多地区难 以满足 。
2) 用地球重力场模型求 N 和ξ。但地球重力场模型只反映 大地水准面的长波变化 ,还只能是趋势数据 。
3) 采用拟合法 ,对 GPS 点进行几何水准的联测 。根据已知点 的高程异常值ξ及其位置关系建立函数模型 ,并用来模拟该区域 似大地水准面高度 ,求解区域内任一点的高程异常值ξ,进而根据 式 (1) 求得任一点的正常高 。
交通设施防护绿地建设应满足道路防护 、生物迁徙和城市景 观建设要求 ;在保证边坡稳定 、改善行车条件的前提下 ,尽量采取 植物护坡技术 ;高速公路 、快速路和大型桥梁穿越区域绿地和大 型生态走廊时 ,应强化道路 、桥梁的生物通道的设置 ,建立生物迁 徙 、觅食和物种交换的通道 。
2. 6 沿海堤坝防护绿地
丁 红 (19692 ) ,女 ,陕西省水利厅 ,陕西 西安 710004
·346 ·
第 34 卷 2008
第 年
25 9
期 月
山
西
建
筑
确定高程异常 (似大地水准面) 的方法比较多 。目前的做法
有以下几种 : 1) 用斯托克斯公式采用重力方法求大地水准高差 N ,这种方
建筑 ,2007 ,33 (12) :3512352.
Analysis and comparison of GPS height measurement accuracy
YANG Lei DING Hong Abstract : Through t he connection surveying of 25 GPS points of t he fourt h2grade leveling , t he paper calculates t he normal height of t he points by using t he polynomial fitting model and t he polyhedral function fitting model , compares t he normal height wit h t he results of t he fourt h2 grade leveling , obtains t he beneficial conclusions , which has t he guiding significance for t he practical production of GPS. Key words : normal height , geodetic height , fitting model , GPS height measurement
⁝
⁝
⁝
⁝⁝⁝ ⁝ ⁝
ξn
an
vn
1 xn yn xnyn …
在最小二乘的准则下 ,求得向量 X 的解 ,回代到式 (3) 中 ,就
可以内插出来未知点的高程异常 。再根据式 (1) 就可以计算出
GPS 点的正常高 。
在式 (3) 中 ,如果取未知数一次项 ,则称平面拟合 ;取二次项 ,
又称曲面拟合 ;取三次项 ,称三次多项式拟合 ,以此类推 。
0. 024
0. 033
0. 026
0. 035
0. 010
0. 038
0. 042
0. 042
0. 038
0. 012
0. 004 4
0. 045
0. 035
0. 048
3) 选择分布和点数都相同的已知点 ,分别用二次多项式和多
面函数模型拟合 。拟合结果见表 2 。
表 2 不同模型拟合结果比较
城市公园绿线控制区应严格保护 ,严禁改变土地用途 ;公园 建设应在符合有关规定的同时 ,充分考虑城市生物多样性建设要 求 ,并考虑群众性体育设施建设 ;街头小绿地建设要兼顾绿量与 景观 、游憩功能的统一 ,要设置园路 、座椅 、垃圾箱等 ,并应配置一 定的游乐设施 。
3 结语
城市绿线规划是一项复杂工程 ,涉及风景 、园林 、绿化 、景观 、 河流等诸多因素 ,文中仅以几大方面作出阐述 。城市绿线规划工 作不是一蹴而就的事 ,需要在各个层次规划不断完善 ,为城市规 划管理工作提供依据 。
面的距离 ,而大地高 H 是地面点沿参考椭球的法线方向到参考
椭球面的距离 ,二者之差就是高程异常 ξ。所以 GPS 高程异常的
确定就成为 GPS 高程转换的关键问题 。
一般用下式来表示大地高 H 、正常高 h 和高程异常ξ三者的
关系 :
ξ= H - h
(1)
源不被破坏 ,有必要把山体纳入绿线控制 。 山体绿线实行长久性严格保护和限制开发 ;可以选择适当区
中图分类号 : TU198
文献标识码 :A
0 引言
由 GPS 所测得的高程是测站相对于 W GS284 椭球面高 ,而我 国所采用的高程系统是相对于似大地水准面的正常高系统 。大 地高这一几何量并不是大多数用户所需要的 ,而人们需要的是具 有物理量属性的正常高 ,如何充分利用大地高这一有效资源转换 成正常高 ,成为人们研究的热门课题 。正常高 h 是地面点到水准
a6 x i 2 yi + a3; …
(3)
若有 n 个点 ,则可以得到下面的矩阵形式 :
ξ= A X + v
(4)
其中 ,
ξ1
a0
v1
1 x1 y1 x1 y1 …
ξ2
a1
v2
1 x2 y2 x2 y2 …
ξ= ξ3 ; A = a2 ; v = v3 ; X = 1 x3 y3 x3 y3 … 。
per analyzes and inquiries into some basic contents t hat green line planning of city draw up , puts forward t he green line planning of city is a
item t hrough t he comprehensive planning to t he detailed planning , should have t he value of t he government and t he city planning management
1 常用拟合方法
1. 1 多项式拟合模型
设测区内任一点 A ( x , y) 的高程异常 ξ与平面坐标有如下
的关系 :
ξ= f ( x , y) + vi
(2)
其中 , f ( x , y) 为ξi 的趋势面 ; vi 为残差 。设 :
f ( xi , yi ) = a0 + a1 xi + a2 yi + a3 xi yi + a4 xi2 + a5 yi2 +
Abstract : According to t he City Green L i ne A dm i nist rative Regulation and t he establishment of city green line planning in Taizhou , t his pa2