无级调节偏心的旋转电弧传感器的设计与仿真
旋转电弧传感器转速控制系统设计
52焊接设备与材料焊接技术第42卷第9期2013年9月文章编号:1002一025x(2013)09—0052—03旋转电弧传感器转速控制系统设计乐健,张华,叶艳辉(南昌大学江西省机器人与焊接自动化重点实验室。
江西南昌330031)摘要:由于焊接过程阻力、电源等的影响,致使旋转电弧传感器的转速波动较大.影响焊缝跟踪的精度,针对此问题设计出了旋转电弧转速控制的硬件系统和软件系统。
并进行了试验,验证了硬件和软件设计的正确性,使得旋转电弧传感器的转速在20H z附近小幅度波动,提高了焊缝跟踪的精确度,进一步提高了焊接的质量。
关键词:旋转电弧传感器;模糊控制;转速控制;焊接自动化中图分类号:T G456.5文献标志码:B0引言由于工业的高速发展.推动了焊接自动化的发展。
目前应用在焊缝跟踪领域内比较广泛的传感器是旋转电弧传感器。
它有许多优点。
旋转电弧传感器是利用电弧本身的特性,当焊丝端点与工件表面的距离发生变化时,此时的焊接电流不同,所以其不受弧光、磁场、飞溅等方面的影响…,即使在恶劣的环境中,也能准确地进行焊缝跟踪,从而实现焊接的自动化。
由于焊接过程阻力、电源等影响[2],旋转电弧传感器的转速会产生很大的波动。
从而影响焊缝跟踪的准确度。
为了实现焊接的自动化,必须研制出一套与之相适应的旋转电弧传感器转速控制系统,以完成焊缝跟踪,提高焊接的质量。
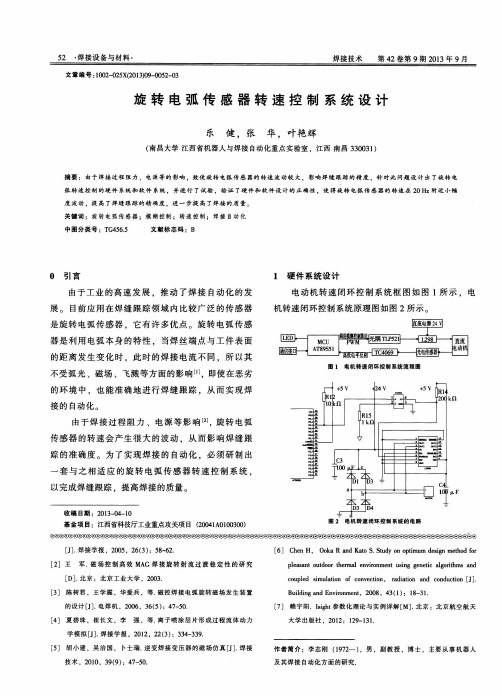
收稿日期:2013一04一10基金项目:江西省科技厅工业重点攻关项目(20041A0100300)1硬件系统设计电动机转速闭环控制系统框图如图1所示.电机转速闭环控制系统原理图如图2所示。
图1电机转速闭环控制系统流程圈图2电机转速闭环控制系统的电路[J].焊接学报,2005,26(3):58—62.[2]王军.磁场控制高效M A G焊接旋转射流过渡稳定性的研究[D].北京:北京工业大学,2003.[3]陈树君,王学震,华爱兵,等.磁控焊接电弧旋转磁场发生装置的设计[J].电焊机,2006,36(5):47—50.[4]夏碧珠,崔长文。
旋转电弧传感器机械结构设计

目录1 引言 (01)1.1选课的依据和意义 (01)1.2当代焊缝跟踪传感器 (01)1.2.1 附加式传感器概述 (01)1.2.2 电弧传感器概述 (02)1.3电弧传感器工作原理 (03)1.3.1 电弧传感器的基本原理 (03)1.3.2旋转电弧传感器的原理 (06)1.4课题任务 (10)2 课题设计主要内容 (11)2.1电弧旋转方案的选定 (11)2.1.1 空心轴电机 (11)2.1.2 运动机构设计 (12)2.1.3 防转机构 (13)2.2总体结构设计 (14)2.2.1 各功能部分的轴向分配 (14)2.2.2 径向空间的分配 (15)2.3导电杆部件的设计 (16)2.3.1 导电杆部件的总体设计 (16)2.3.2 轴承的选用与安装 (16)2.4检测装置的选定与安装 (17)2.4.1 电弧扫描位置与转速的检测方法 (17)2.4.2 分体式安装的旋转编码器 (18)2.5偏心机构的设计 (19)2.5.1 偏心方案的确定 (19)2.5.2 偏心机构的平衡 (22)2.6外壳的设计 (23)2.6.1 外壳总体设计 (23)2.6.2 通水方式 (24)2.6.3 通气方式 (25)2.7绝缘与密封设计 (26)2.7.1 绝缘设计 (26)2.7.2 密封设计 (27)2.8其它零部件的设计 (28)2.8.1 集线盖与接地装置 (28)2.8.2 安装设计 (30)2.8.3 修配方案设计 (30)2.9设计参数 (31)3结论 (32)3.1课题设计过程总结 (32)3.2课题设计的缺陷与后续工作 (32)参考文献 (34)致谢 (36)附录 (37)1 引言1.1 选课的依据和意义现代焊接诞生至今仅百余年,但已显示出生命力,焊接在近代工业的发展中发挥了不可替代的重要作用。
焊接不仅是一种重要的基础工艺,而且已发展成为一种新兴的综合工业技术。
它广泛应用于造船、压力容器制造,石油化工等钢结构制造领域。
气幕式旋转电弧传感器结构设计

机 电技术
21年6 01 月
气幕式旋转 电弧传感器结构设计
陈海军 张华
( 昌大学 江西省机器人与焊接 自动化重点实验室 ,江西 南 昌 30 3 ) 南 3 0 1 摘 要:针对水下焊接焊缝质量 差等 问题 , 设计了一种用于水下局 部干法焊接 的气幕式旋转 电弧传感器来改善水下
的高压气 幕 , 阻挡 外 面 的水入 侵 ,形成 一 个气 相
区, 电弧在 气相 区 中燃烧 , 而提 高焊 接 的质 量 。 使 从
速 度快 、焊缝 容 易淬硬 、金 属 的韧 性 降低 ,含氢 量 高 、易 产生 氢裂 ,连 续作 业难 以实现 、 自动化
程 度低 。
本 文 利 用 收 缩 喷 管 原 理 结 合 现 有 的传 感 器 方 案
它们 集成 于传 感器 内部 , 其结 构更 紧凑 。 使
性强等 特 点 , 并被越 来越 多地 用 于焊缝 自动 跟踪 。 其基 本原 理是 利用 焊枪 与 工件 之 间距 离 的变 化 引 起 的 焊 接 电流 变 化 来 探 测 焊 枪 高 度 和 左 右 偏 差
口】
。
使用 旋转 电弧传 感 器检 测 坡 1 ,当坡 口高度 : 3
l 气幕式旋转 电弧传感器的总体结构方案
} 基金 项 目:江 西省 科技 攻关 项 目资助 ( 07 G 9 0 )水下焊 接机 器人 系统 研究 与开 发 2 0B O 1 0
作者 简介 :陈 海军 (99 ) 17一,男 ,硕 士研究 生 ,研究 方 向:水 下机器 人 焊接 自动化 。
2 气幕式旋转 电弧传感器的结构设计
根据 该 传感 器 的结 构和各 部 分 的功 能 ,本 文 将 传感 器分 为 动力驱 动 与偏 心调 节模 块 、外 壳模 块 和排 水罩 模块 分别加 以论 述 。
基于ANSYS平台的旋转电弧传感器焊接热过程模拟

基于ANSYS平台的旋转电弧传感器焊接热过程模拟
黄晖;贾剑平;黎和昌
【期刊名称】《南昌大学学报(工科版)》
【年(卷),期】2007(029)001
【摘要】针对旋转电弧传感器焊接的特点,对平板MIG焊接,建立了适当的有限元计算模型,利用ANSYS软件的APDL语言编写了程序,解决了呈高斯函数分布且旋转移动的焊接热源的施加的问题,实现了焊接温度场的三维动态模拟,并将计算量控制在可接受的范围内.研究了旋转电弧传感器自身的特性对焊缝质量的影响作用,并通过实验验证了模拟的可靠性.
【总页数】4页(P22-24,28)
【作者】黄晖;贾剑平;黎和昌
【作者单位】南昌大学,机电工程学院,江西,南昌,330031;南昌大学,机电工程学院,江西,南昌,330031;南昌大学,机电工程学院,江西,南昌,330031
【正文语种】中文
【中图分类】TG402
【相关文献】
1.基于ANSYS上的焊接热过程模拟技术的研究 [J], 张亮峰
2.基于旋转电弧传感器的水下焊接高压电弧仿真计算 [J], 李志刚;张华;贾剑平
3.基于ANSYS的TIG焊接电弧数值模拟研究 [J], 朱加雷;焦向东;俞建荣;蒋力培;周灿丰;薛龙
4.基于旋转GAUSS曲面体热源模型的激光焊接热过程的数值模拟 [J], 张瑞华;片
山聖二;内藤恭章;樊丁
5.基于旋转电弧传感器的焊接电流波形研究 [J], 乐健;张华;叶艳辉
因版权原因,仅展示原文概要,查看原文内容请购买。
TIG焊旋转电弧传感器结构设计

筑等众 多工业 领域 。TG焊采用 非熔化 极作 电极 , I 电弧
稳定 , 即使在 很小 的 焊接 电 流下 ( 于 1 也能 稳 定燃 小 0 A) 烧, 不会产生 飞溅成 型美 观。热 源和 焊丝 可分 别 控制 , 因 而, 热输入量容易调节 , 特别 适合薄板 、 超薄板 的焊接 。可 进行 各种 位置 的焊 接 , 易于实现机械化和 自动化焊接。 焊缝跟踪是保证焊 接质量 和实现焊 接过程 自动化 、 智
m a e frt e sr c u e w t d o h tu t r h Pm/E. i
Ke r s T G l i g e m a k n y wo d : I wed n ;s e t c ig;r tt g a e s n o ;h l w s atmo o r oai r e s r ol h tr n o f
0 引 言
该焊炬小巧灵活 , 调节方便 , 机械振动小 , 焊炬可达性好。
1 旋转 电 弧 传感 器 的结 构
焊接作 为现代 制造 技术 的一个重要 组成 部分 , 广泛地 应用 于包 括机 械制 造 、 航空航 天 、 源 、 通 、 洋工 程 、 能 交 海 建
1P焊旋转 电弧传感器结构如图 1 r I 。
中图 分 类 号 :T 2 H 12 文 献 标 识 码 :A 文 章 编 号 :1 0- 77 2 1 )602 - 2 0 09 8 (0 0 0 - 120 - -
S r t e de i n o o a i r e o t G l i g t ucur sg fr t tng a c s ns r wih TI wed n
是让 电弧随焊 炬在坡 口内横 向扫描时 , 长变化引起 的电 弧
一种双丝旋转电弧传感器[发明专利]
![一种双丝旋转电弧传感器[发明专利]](https://img.taocdn.com/s3/m/a277c6cf0722192e4436f64c.png)
专利名称:一种双丝旋转电弧传感器专利类型:发明专利
发明人:李毅,周煜,洪波,陈佳洋
申请号:CN201610213217.X
申请日:20160407
公开号:CN105665903A
公开日:
20160615
专利内容由知识产权出版社提供
摘要:本发明公开了一种双丝旋转电弧传感器,应用于焊接自动化、机器人焊接、焊缝自动跟踪领域。
它主要包括小型送丝机、叉形主导电杆、二级导电杆、驱动机构、导电杆摆动固定机构、偏心调节机构、外壳体。
当驱动机构运行时带动叉型主导电杆及送丝机构同步旋转,二级导电杆随主导电杆作锥型旋转,形成双丝旋转电弧。
本发明与现有技术相比,具有以下优点及突出性效果:本发明解决了双丝旋转电弧焊丝缠绕的问题,提高焊接速度及效率;在立焊与仰焊的应用中,能在保证一定焊接速度的前提下减小熔池的流动与滴落,提高焊缝质量。
申请人:湘潭大学
地址:411105 湖南省湘潭市雨湖区羊牯塘27号湘潭大学
国籍:CN
更多信息请下载全文后查看。
基于旋转电弧传感的弧焊机器人焊缝跟踪系统

基于旋转电弧传感的弧焊机器人焊缝跟踪系统
熊震宇;张华;贾剑平;潘际銮
【期刊名称】《中国机械工程》
【年(卷),期】2003(014)012
【摘要】研制了一套基于旋转电弧传感的弧焊机器人空间曲线焊缝智能跟踪控制系统.介绍了系统的硬件构成、软件设计及模糊控制方法.研究了不同焊接位置时,焊接熔池金属对坡口的影响作用,提出采用补偿因子加权处理方法,可有效提高平焊、横焊位置焊缝偏差的识别能力.针对立焊位置的脉冲焊接方法,采用形态滤波技术,通过提取脉冲焊接电流的上包络线,利用一次谐波法准确地对立焊焊缝进行了识别.试验结果表明,该焊缝跟踪控制系统对平焊、横焊及立焊位置的曲线焊缝跟踪效果良好,达到焊接工艺要求.
【总页数】4页(P1039-1042)
【作者】熊震宇;张华;贾剑平;潘际銮
【作者单位】南昌航空工业学院材料科学与工程系;南昌大学机电学院;南昌大学机电学院;清华大学机械工程系
【正文语种】中文
【中图分类】TP242
【相关文献】
1.弧焊机器人旋转电弧传感实时焊缝纠偏系统的开发 [J], 余锋;熊震宇;张华;贾剑平
2.基于旋转电弧传感器的角焊缝跟踪 [J], 乐健;张华;叶艳辉;彭园
3.基于Kalman滤波的磁控旋转电弧传感器焊缝跟踪偏差预测 [J], 洪波;柳健;洪宇翔;王谦
4.基于80C196K的旋转电弧传感弧焊机器人焊缝跟踪控制系统 [J], 唐刚;林谋有;欧阳快德
5.高速旋转扫描电弧传感器在弧焊机器人焊缝纠偏系统中的应用 [J], 贾剑平;张华因版权原因,仅展示原文概要,查看原文内容请购买。
基于IGBT的无源无级调感技术

基于IGBT的无源无级调感技术
刘骥;朱东柏;周永勤;崔勇
【期刊名称】《哈尔滨理工大学学报》
【年(卷),期】2004(9)1
【摘要】提出了一种用IGBT开关实现无源方式连续调感的方法,并用MATLAB与PSCAD软件对其进行了仿真.仿真结果表明,该方法可以实现快速改变电感参数,根据需要随时调整参数,产生必要的检测信号,证明了理论推导结论的正确性.
【总页数】4页(P50-53)
【作者】刘骥;朱东柏;周永勤;崔勇
【作者单位】哈尔滨理工大学,电气与电子工程学院,黑龙江,哈尔滨,150040;哈尔滨理工大学,电气与电子工程学院,黑龙江,哈尔滨,150040;哈尔滨理工大学,电气与电子工程学院,黑龙江,哈尔滨,150040;哈尔滨理工大学,电气与电子工程学院,黑龙江,哈尔滨,150040
【正文语种】中文
【中图分类】TM50
【相关文献】
1.无级调感技术在特高压变压器局放试验中的应用研究 [J], 蔚超;刘阳;;
2.基于IGBT有源逆变的串调系统的控制策略研究 [J], 姚锐;李俊
3.无级调感技术在特高压变压器局放试验中的应用研究 [J], 蔚超;刘阳
4.IGBT半桥串联谐振型感应加热电源调频调功技术研究 [J], 陈建
5.无级调容智能滤波技术在充电站中的应用研究 [J], 周晓云; 卜婷婷; 肖奔奔; 齐连伟; 胡晓霞; 李永祥; 柴迪运
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一种机构的原理如图 1 所示 , 结构较为简单 、 紧凑 , 但 由于导 电杆高速旋转 , 导 电杆 的导电要通 过 动接触 来实 现 , 损耗 较 大 , 使 用 寿命 降低 , 同时 电 弧旋 转半 径无 法灵 活调 节1 4 ] 。 第 二种 机构 ( 原 理见 图 2 ) 由于有齿轮传动 , 结构较大 , 影响 了焊炬的可达 性; 而且传动件会引起严重噪声 , 其传动件的安装 精度 易 受 烟尘 污 染 而 导致 转 动 时 系 统 处 于受 力 不 均 衡状 态 l 5 l 。 最近 , 南 昌大学 机器人 研究 所 根据 圆锥
小 了机 械振 动 。
器的结构 , 在此设计 出一种无级电调节旋转偏心的 电弧传感器结构 , 模型剖视 图如图 4 所示 。 该传感器 包括壳体 4 和导电杆 1 , 壳体内部装有偏心调节平 台, 该偏心调节平台上装有偏心调节 电机 7 和滚珠 丝杠 5 , 在偏心调节平台内装有由微型电机 2 2 通过 齿轮驱动的旋转平台; 导电杆上端与壳体 的顶部形
电动机
光码盘 偏心机构
调芯轴承
焊 丝
图 3 电 弧传 感 器 空 心 电机 方 案
成 铰链 , 该 导 电杆穿 过一 偏心 转子 与调 心球 轴承 l 9
图1 电弧 传 感 器 圆锥 摆 动 方 案
2 无 级 电调 节偏 心 的旋 转 电弧传 感 器 结 构
针对 以往 旋转 电弧 的优 缺点 , 进一 步优 化 传感
图 2 电弧传感器 圆锥摆动方案
电极
摆动方案优化 了旋转电弧传感器的结构1 6 ] , 使传感 器 的最大直径 保持在 5 0 mm以 内 , 扩 大了应用 范 围。 潘 际銮 院 士所 设 计 的 空心 电机 方 案 机 构原 理 如 图 3所 示 , 较 以上 两种 方 案 减 小 了振 动 和 噪 声 , 体 积 也有所减小【 7 _ 8 J , 但是调节旋转偏心的方式仍然采用 机械式 , 不方便且不准确。
菩 鳓
’ 7 7 。
形成铰链连接 ; 导电杆下端与连接有一导电嘴的水 汽保护连接头 1 0固联 , 焊丝穿过导 电杆旋转 , 并可 与 导 电嘴 1 2成导 电紧密 动配 合 。 相 比前面几种旋转 电弧方案 , 该方案具有如下 特点 : ( 1 ) 偏心调节采用 电机驱动 , 解决 了传统机械 式调 节无 法 准确 控制 偏 心量 的 缺点 , 实 现 了无级 偏 心调节 , 能精确调节旋转电弧传感器的旋转半径 , 并 且 可 以根 据不 同的焊接 规范 实 时调 节旋转 半径 。 ( 2 ) 该旋转电弧传感器的定位脉冲采用接近传 感器获得 , 与 以往的光 电传感器相 比, 抗干扰能力 大大增 强 。 ( 3 ) 该结构偏 心量 固定 为 0 . 2 5 m m, 而 以往 的 偏心量为 l 2 . 5 m m, 偏心量缩小了 4 ~ 1 0 倍, 从而减
焊接设备
李湘 文等 : 无级调节偏 心的旋转 电弧传感器 的设计 与仿真
第 1 期
种是依靠导 电杆端面上焊丝导出孔的偏心距来 实 现 电弧旋 转运 动 , 导 出孔 的偏 心距 就 是 电弧旋 转 半径 ; 一 种是 采用 圆锥 摆 动 直流 电动 机驱 动 和一 级 齿轮减速传动; 还有一种是潘际銮院士和廖宝剑设 计 的轻 巧空 心轴 电动 机驱 动旋 转 扫描 焊 炬 , 该 机 构 可靠 实 用 。