GPS控制测量技术报告
GPS-RTK测量及检核技术总结
GPS-RTK测量及检核技术总结2、RTK平面控制点按精度划分等级为:一级控制点、二级控制点、三级控制点、图根控制点。
RTK高程控制点按精度划分等级为等外高程控制点。
3、一级、二级、三级平面控制点及等外高程控制点,适用于布设外业数字测图和摄影测量与遥感的控制基础,可以作为图根测量、像片控制测量、碎部点数据采集的起算依据。
4、RTK测量可采用单基准站RTK和网络RTK两种方法进行。
在通信条件困难时,也可以采用后处理动态测量模式进行测量。
5、有条件采用网络RTK测量的地区,宜优先采用网络RTK技术测量。
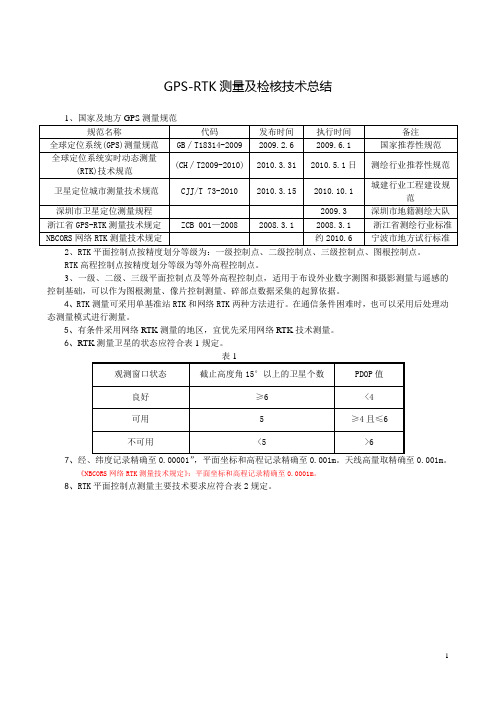
6、RTK测量卫星的状态应符合表1规定。
表17、经、纬度记录精确至0.00001”,平面坐标和高程记录精确至0.001m。
天线高量取精确至0.001m。
《NBCORS网络RTK测量技术规定》:平面坐标和高程记录精确至0.0001m。
8、RTK平面控制点测量主要技术要求应符合表2规定。
表2《深圳市卫星定位测量规程》:将图根点和碎步点加上:表3 GNSS RTK平面测量技术要求注:①一级GNSS控制点布设应采用网络RTK测量技术;②网络RTK测量可不受起算点等级、流动站到单基准站间距离的限制;③困难地区相邻点间距离缩短至表中的2/3,边长较差应不大于2cm。
9、RTK控制点平面坐标测量时,流动站采集卫星观测数据,并通过数据链接收来自基准站的数据,在系统内组成差分观测值进行实时处理,通过坐标转换方法将观测得到的地心坐标转换为指定坐标系中的平面坐标。
10、测区坐标系统转换参数的获取:a) 在获取测区坐标系统转换参数时,可以直接利用已知的参数;b) 在没有已知转换参数时,可以自己求解;c) 2000国家大地坐标系与参心坐标系(如1954年北京坐标系、1980西安坐标系或地方独立坐标系)转换参数的求解,应采用不少于3点的高等级起算点两套坐标系成果,所选起算点应分布均匀,且能控制整个测区;d) 转换时应根据测区范围及具体情况,对起算点进行可靠性检验,采用合理的数学模型,进行多种点组合方式分别计算和优选;e) RTK控制点测量转换参数的求解,不能采用现场点校正的方法进行。
GPS控制点复测成果报告范文

GPS控制点复测成果报告范文控制点复测、加密成果报告一、工程概况内蒙古自治区一级公路国道110线改扩建TJ-2标合同段起讫桩号为K0+000~K5+948.8,全线均在原路基础上进行加宽扩建,路线走向与老路相同。
起点位于临河市西南,后与临河西外环相交,全长约5.948.8Km。
地形沿线地势自东北向西南逐步升高,但起伏极小,属于高程异常变化平缓地区。
二、复测依据《工程测量规范》(GB50026-2007)《公路勘测规范》(JTGC10-2007)《全球定位系统GPS测量规范》(GB/T18314-2022)三、测量仪器中海达v8型双频GPS静态接收机四、施测方法测量过程中采用复测、加密同时进行的方法作业,复测设计院提供的控制点17个、加密控制点4个,对测量成果进行统一平差并与相邻标段进行联测,D29、D30是和TJ-1标共用边.1.平面控制点外业数据采集使用2台华测双频GPS接收机,观测时严格按《公路勘测规范》(JTGC10-2007)的要求执行,采用静态定位技术施测,同步作业图形之间采用边连结的方式,并做到有较强的图形结构,确保该控制点的高精度和高可靠性。
内业数据处理采用南方GNSS软件进行平差解算。
2.高程控制点外业数据采集使用2台华测双频GPS接收机,观测时严格按《公路勘测规范》(JTGC10-2007)的要求执行,采用静态定位技术施测,每时段观测前后各量取天线高一次,用小钢卷尺从厂家规定的天线高量测基准面彼此相隔120°的三个位置分别量取天线到控制点标志面的垂直距离,互差应小于2㎜,取平均值为天线高。
内业数据处理采用南方GNSS软件进行拟合高程解算。
五、成果精度评定经南方GNSS软件解算平差后平面控制点约束点间的边长相对中误差≤1/40000,约束平差后最弱边相对中误差≤1/20000精度满足要求;高程控制点用南方GNSS软件进行拟合高程解算后精度满足四等水准要求。
六、1.导线点测量成果报表(附后)2.水准点测量成果报表(附后)七、控制点平差成果(附后)八、测量仪器鉴定证书(附后)九、控制点布置图(附后)。
控制点测量报告解读
1b
-0.006
-0.006
-0.001
2a
0.008
-0.001
0.002
2b
0.003
0.005
-0.001
3a
-0.005
0.001
0.000
3b
0.003
-0.011
-0.004
统计
中误差(mm)
11
Δ平面max(mm)
22
Δ高程max(mm)
-17
采集总数
6
合格点数
5
超限点数
1
116:51:53.9679
-2.461
1b
038:18:19.1125
116:51:53.9676
-2.462
2b
038:18:19.1127
116:51:53.9681
-2.462
2a
038:18:19.1129
116:51:53.9679
-2.459
采集数据
序号
Δx
Δy
Δh
1a
-0.021
0.009
116:51:53.9795
-2.472
038:18:19.1285
116:51:53.9797
-2.472
1c
038:18:19.1285
116:51:53.9801
-2.471
1b
038:18:19.1285
116:51:53.9802
-2.468
2c
038:18:19.1285
116:51:53.9792
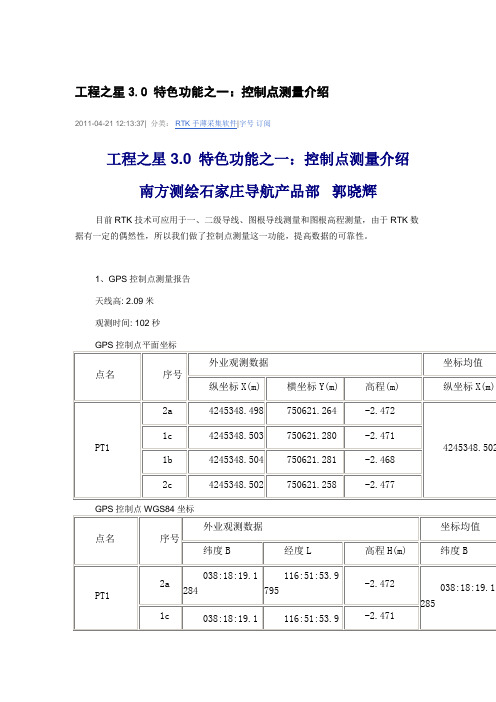
1、GPS控制点测量报告
天线高: 2.09米
观测时间: 102秒
gps实验报告
gps实验报告GPS实验报告摘要:本实验旨在探究全球定位系统(GPS)的工作原理和应用。
通过实地观测和数据分析,我们对GPS的精度、可靠性以及误差来源进行了研究。
实验结果表明,GPS在定位和导航方面具有高度的准确性和实用性。
引言:全球定位系统(GPS)是一种由美国政府开发的卫星导航系统,旨在提供全球范围内的定位、导航和定时服务。
它由一组卫星、地面控制站和用户接收器组成。
GPS的工作原理是通过测量用户接收器和卫星之间的信号传播时间差来计算位置。
GPS在航海、航空、交通、军事等领域有着广泛的应用。
实验方法:我们选择了一个开阔的户外场地进行实地观测。
首先,我们设置了一个基准点,并在该点上放置了一个已知坐标的接收器。
然后,我们在不同位置放置了其他接收器,并记录了它们的坐标。
接着,我们使用这些接收器接收卫星信号,并记录了接收器的位置和测量值。
实验结果:通过对实验数据的分析,我们得出了以下结论:1. GPS定位的精度与接收器的数量和质量有关。
当使用多个接收器时,可以通过差分定位方法提高定位精度。
此外,高质量的接收器具有更好的信号接收和处理能力,能够提供更准确的定位结果。
2. GPS定位的可靠性受到多种因素的影响。
天气条件、建筑物、树木和其他遮挡物都可能导致信号衰减或多径效应,从而影响定位的准确性。
此外,接收器的位置和姿态也会对定位结果产生影响。
3. GPS定位存在误差,主要包括系统误差和随机误差。
系统误差是由于卫星轨道误差、钟差等因素引起的,可以通过差分定位或使用更精确的卫星轨道和钟差数据进行校正。
随机误差是由于信号传播路径中的多路径效应、大气延迟等因素引起的,可以通过数据滤波和平均处理来减小。
讨论:GPS作为一种先进的导航技术,已经广泛应用于各个领域。
在航海和航空领域,GPS可以提供精确的位置和导航信息,帮助船舶和飞机准确到达目的地。
在交通领域,GPS可以用于车辆定位和导航,提高交通运输的效率和安全性。
在军事领域,GPS可以用于导弹制导、战场定位和目标跟踪等任务。
gps静态测量实习报告心得(实习报告心得,静态,测量)
gps静态测量实习报告(实习报告,静态,测量) gps(rtk)实习报告一:实习目的:通过实习进一步深入了解gps原理以及在测绘中的应用,巩固课堂所学的知识.熟练掌握gps仪器的使用方法,学会gps进行控制测量的基本方法并掌握gps数据处理软件的使用方法.二:实习地点:扬州环境资源职业技术学院三:实习内容:测量学校四:实验原理:gps定位的原理是gps卫星发射的测距信号和导航电文,导航电文中含有卫星位置的信息,用户用gps接收机在某一时刻接收三颗或三颗以上的gps卫星,测出测站点(gps天线中心)到卫星的距离并解算出该时刻卫星的空间位置根据距离,并解算出卫星的空间位置,根据距离交会法求测站点坐标.其基本思想为:在基准站上安置一台gps接收机,对所有可见卫星进行连续观测并将其观测数据通过无线电传输设备实时地发送给用户观测站,用户站在接收gps卫星信号的同时,通过无线电接收机设备接收基准站传输的观测数据,实时计算测站点的三维坐标.五:实验过程:(一).参考站要求参考站的点位选择必须严格。
因为参考站接收机每次卫星信号失锁将会影响网络内所有流动站的正常工作。
1..周围应视野开阔,截止高度角应超过15度,周围无信号反射物(大面积水域、大型建筑物等),以减少多路径干扰。
并要尽量避开交通要道、过往行人的干扰。
2.参考站应尽量设置于相对制高点上,以方便播发差分改正信号。
3.参考站要远离微波塔、通信塔等大型电磁发射源200米外,要远离高压输电线路、通讯线路50米外。
4.rtk作业期间,参考站不允许移动或关机又重新启动,若重启动后必须重新校正。
根据以上要求在校园里选择合适的已知点,将天线架设是该点做为基准站,同时开机.打开主机和电台,主机开始自动初始化和搜索卫星,当卫星数和卫星质量达到要求后(大约1分钟),主机上的dl指示灯开始5秒钟快闪2次,同时电台上的rx指示灯开始每秒钟闪1次。
这表明基准站差分信号开始发射,整个基准站部分开始正常工作。
GPS RTK实时动态测量
GPS RTK实时动态测量实验报告姓名:**班级:2004一班专业:地理信息系统组号: 3 组郑州大学环境与水利学院2007年7月7日实验名称 GPS RTK实时动态测量实验一、实验概述本次实验是在原有传统控制测量的数据点上进行GPS RTK实时动态测量,选取的是郑州大学新校区环保馆前空地。
二、实验目的1.了解GPS RTK测量系统的组成,理解其基本原理;2.学会正确设置GPS RTK测量系统的基准站和流动站并在点位上进行实时动态测量;三、实验原理介绍GPS RTK实时动态测量技术的基本原理也即载波相位差分定位技术,主要介绍求差法即可。
要有数学公式。
GPS RTK实时动态测量技术其基本原理是采用了载波相位差分定位技术。
该定位技术具体而言又可分为两种方法,第一种方法,基准站实时将载波相位的改正量发送给用户站,以对流动站的载波相位进行改正实现定位。
该方法称之为改正法,另一种为求差法,这种方法则是将基准站的载波相位发送给流动站,在用户站对载波相位观测值求差,获得诸如静态相对定位的公式(1)、(2)、(3)的单差、双差、三差求解模型,并采用与静态相对定位类似的求解方程进行求解。
公式(1)单差观测方程:公式(2)双差观测方程:公式(3)三差观测方程:与静态相对定位不同的是,动态相对定位求解的是用户的位置,因此其定位的程序为:并由流动站将观测值求差进行坐标解算此处给出求差法的定位程序:(1)基准站站在保持不动的情况下,静态观测若干历元,并将基准站上的载波相位观测值通过数据链传送给流动站,在流动站对载波相位观测值求差,获得静态相对定位的单差、双差和三差模型,然后按照静态相对定位法求出整周未知数,这一过程称为初始化阶段。
(2)将求出的整周未知数代入双差模型,此时双差只包括ΔX、ΔY、ΔZ三个坐标位置分量,所以只要有4颗以上的卫星的一个历元的观测值,就可实时地求解出三个位置分量。
(3)将求出的坐标增量ΔX、ΔY、ΔZ加入已知的基准站的WGS-84地心坐标X k’、Y k’、Z k’即可得到流动站的地心坐标,即然后利用已经获得的坐标转换参数,将流动站的坐标转换到当地的空间直角坐标系中。
控制网测量报告范文
控制网测量报告范文一、引言控制网测量是指为了准确测量和定位地表物体或地下物体而在地表或地下预先布置的一系列基准点或控制点,通过对这些控制点进行测量来进行精确测量定位的技术。
本次测量任务是在市区内进行的一次控制网测量,目的是建立一套精确的控制网,为后续工程测量提供准确的基准。
二、测量任务本次测量任务的目标是建立50个控制点,并确保测量精度在±1mm以内。
控制网的布点区域涵盖了整个市区范围,主要包括建筑物、道路、河流等不同地物类型的区域。
三、测量方法与仪器为了保证测量的准确性和效率,我们采用了全站仪和GPS测量仪器进行测量。
全站仪可以测量水平和垂直方向的角度和距离,适用于建筑物等高程测量;GPS测量仪器则主要用于测量地面上的平面位置信息。
在测量过程中,我们还结合了卫星定位技术,以提高测量的准确性。
四、控制点的布设为了满足测量任务的要求,我们按照规定的间距在目标区域布设了50个控制点。
布设控制点时,我们选择了地势较高的地点,避免了周围的建筑物和树木对测量的干扰。
每个控制点都经过精确的测量与计算,以确保其坐标和高程的准确性。
五、测量结果经过多次测量和数据处理,我们得到了所有控制点的坐标和高程信息。
测量精度符合要求,高程精度在±1mm以内,平面坐标精度在±3mm以内。
除了控制点的测量结果外,我们还绘制了控制网的网络图,并计算了相邻控制点之间的距离和方位角,以备后续的工程测量使用。
六、数据分析通过对控制点的测量结果进行统计和分析,我们发现在市区范围内控制点的分布是比较均匀的,没有明显的规律。
并且个别控制点在测量过程中出现了误差,经过排查后发现是由于周围的电磁干扰和地面不平坦造成的。
为了降低这些干扰因素的影响,我们在后续的测量过程中做了相应的改进措施。
七、改进措施为了提高控制网测量的准确性和效率,我们总结了以下几点改进措施:1.增强设备的抗干扰能力,减少电磁干扰以及地面不平性对测量结果的影响;2.加强对工作人员的培训,提高其操作技术和测量意识;3.定期对全站仪和GPS仪器进行校准和维护,保证其准确性。
D级GPS控制测量专业技术总结
D级GPS控制测量专业技术总结编写单位:编写者:年月日审核意见:审核者:年月日桂林市七星区GPS 控制测量技术总结一、测区概况七星区位于桂林市的东南部,北至迭彩区,南至 穿山公园,西至象山区,东至桂林环城公路。
测区内平均高程为海拔150米。
测区房屋较多,通视不是很好。
但测区平坦,交通便利,便利了测绘工作的开展。
测区控制范围大致位于东经110°17' 49" - 110°19' 57",北纬25°15' 50" - 25°18' 00" 之间。
二、作业依据和已有测绘资料1、《GPS 与数字化测图实习指导书》2、本次实习《技术设计书》3.中华人民共和国建设部标准《全球定位系统城市测量技术规程》。
4.国家测绘局颁布的《全球定位系统(GPS )测量规范》(CH2001-92)。
城市各级GPS 控制网平均边长 表1(单位:km )等级 C D E 一级 二级 平均距离 10~15 5~10 2~51 〈1城市各级GPS 控制网最弱边相对中误差 表2等级 固定误差a比例误差b最弱边相对中误差C 10 5 1/120000D 10 10 1/80000E 10 20 1/45000 一级 10 20 1/20000 二级 15201/10000表3:级别相邻点基线分量中误差 相邻点间平均距离 /km 水平分量 /mm 垂直分量 /mmB5 10 50 C 10 20 20 D 20 40 5 E20 40 3三、坐标系的选择中央子午线精度为111°,测区投影分带为6°带的第19带,3°带的第38带。
GPS网的无约束平差平面坐标系统选用WGS-84坐标系,高程采用85黄海国家高程基准。
横轴加常数500000m。
GPS的约束平差选择桂林本地的自建坐标系统和无大地水准模型的椭球,卫星星历采用广播星历。
GPS静态控制测量报告
GPS静态控制测量报告GPS静态控制测量是使用全球定位系统(GPS)进行高精度测量的一种方法。
该方法通过在地面上安装GPS接收器,并获得一定时间范围内的GPS观测数据,以确定测量点的空间坐标。
本报告旨在对GPS静态控制测量进行详细说明,并分析测量结果。
一、测量目的和背景本次测量的目的是确定目标测量点的精确坐标,以便在地理信息系统或工程项目中使用。
通过GPS静态控制测量,可以获得高精度的空间坐标,提供准确的测量结果。
二、测量原理和方法1.GPS系统原理:GPS系统是由一组卫星、地面控制站和接收器组成。
卫星发射信号,接收器接收信号并计算出接收器与卫星之间的距离。
通过同时接收多颗卫星的信号,并使用三角定位原理,可以确定测量点的三维坐标。
2.测量方法:测量前需选择合适的测量基准点,并在测量区域内布设控制点。
接收器安装于控制点上,定时记录卫星信号,以获得足够的观测数据。
观测时间可根据测量要求而定,一般需要数小时至数天。
收集到的观测数据通过专门的处理软件进行计算和分析,得出测量点的坐标。
三、测量器材和工具1.GPS接收器:高精度的GPS接收器,包括天线和数据记录器。
接收器应具备双频测量能力,以提高测量精度。
2.三脚架或测量支架:用于安装GPS接收器,保持接收器的稳定。
3.电源和数据传输设备:为接收器供电和数据传输,可以使用电池或外部电源。
四、测量过程和数据处理1.安装接收器:根据测区的实际情况,选择合适的控制点布设接收器,确保接收器安装稳固。
2.数据采集:启动接收器,开始数据采集。
采集时间应该足够长,以获得稳定的测量结果。
同时,还需记录气象条件、接收器状态等相关信息。
3.数据传输和处理:将采集到的数据传输至数据处理软件进行计算和分析。
处理软件会根据测量原理和数据质量对数据进行修正和筛选,得出最终的测量结果。
五、测量结果和精度分析通过GPS静态控制测量得到的结果是测量点的三维空间坐标。
根据测量要求和测量条件的不同,精度可以达到亚米级甚至亚亚米级。
控制测量实习报告3篇
控制测量实习报告3篇控制测量实习报告篇11.概述1.1实习目的(1)巩固课堂教学知识,加深对控制测量学的基本理论的理解,能够用有关理论指导作业实践,做到理论与实践相统一,提高分析问题、解决问题的能力,从而对控制测量学的基本内容得到一次实际应用,使所学知识进一步巩固、深化。
(2)通过实习,熟悉并掌握E级GPS网、二级导线和二等水准测量的作业程序及施测方法。
(3)熟悉水准仪、GPS、全站仪、水准仪的工作原理。
1.2实习地点、时间本次实习的地点位于益阳市,从华天大酒店开始沿康复路至迎宾路交点,向北至团圆路交点,以这三个点构成一个闭合圈。
时间从9月1日至9月29日1.3实习组织和安排本次实习总共35人,在老师指导下分成5个大组,每组7人,我们所在的是第四组。
所领仪器如下:工具包1个(内含:记录板1块,2m 小钢尺2把,锤子1把);全站仪(包括电池、充电器)1台,棱镜箱2个,脚架3个;水准仪(带脚架)1台,水准尺1对,尺垫2个。
自备:钢钉(水泥钉),油漆,铅笔、小刀等文具用品。
1.4实习任务根据大地测量技术设计的要求,结合测区自然地理条件的特征,选择最佳布网方案——E级GPS控制网,充分体现布网的高精度和便利性,进一步完成二级导线和二等水准的测量任务,保证在所规定的期限内完成实习所需要完成的任务。
包括:控制网各点坐标及高程,导线观测记录成果表,附合导线坐标计算表,二等水准外业测量记录表。
1.5执行规范(GB-50026-)《工程测量规范》(GBT128987-)《国家一、二等水准测量规范》《国家一、二级导线测量规范》2.测区概况2.1地形条件测区地势高低起伏明显,路况良好,视野开阔,便于选点和后续的测量工作。
2.2气候条件市境属亚热带大陆性季风湿润气候,境内阳光充足,雨量充沛,气候温和,具有气温总体偏高、冬暖夏凉明显、降水年年偏丰、7月多雨成灾、日照普遍偏少,春寒阴雨突出等特征。
年平均气温16.1℃—16..9℃。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、测区概况沈海复线A3标段起点位于罗源县松山镇选屿村以东(起点桩号K39+411.5)与A2标段终点相接。
建北山特大桥(1642米)再跨省道201,至北山村以西,路线终点位于连江县马鼻村前村以西的石狮山(终点桩号YK44+280,ZK44+289)与A4标起点相接,设置石狮隧道(右洞全长2963米,A3标段长1662米,左洞全长2950米,A3标段长1647米)路线总长4.55079公里。
二、作业依据和已有测绘资料1、国家测绘局颁布的《全球定位系统(GPS)测量规范》(CH2001-92);2、JTG C10-2007《公路勘测规范》;3、沈海复线A2A3标控制点成果;三、坐标系的选择测区中央子午线精度为119°30',GPS网的平面坐标系统选用西安80坐标系,高程系统采用1985黄海国家高程基准。
四、仪器设备和软件GPS控制测量采用Trimble-R8 GNSS 系统和中海达V8系统,其相关指标如下表:Trimble-R8型GPS测量系统配备有TGOfficev1.63 后处理解算软件(包含数据传输、基线向量处理、GPS网平差软件、多种GPS 数据格式转换等功能);中海达V8型测量系统有HDS2003数据处理软件可以将V8的数据转换为RENIX格式,最后成果都将使用TGOffice处理。
五、三等GPS导线网的设计和观测1.GPS布网为了将来与A2标顺利结合,我标在此次施工导线复测加密控制网中与A2标进行联合控制网复测加密,共用同一套GPS静态仪器,我标设计院交桩平面控制点11个(LN032,LN033,LN032-1,LN032-2,LA030,LA031,LN031-1,LN031-2,LA032,LA033,LA034),在充分利用设计院控制点,沿线地形地貌和考虑工程精度需要的基础上布设施工加密控制点7个,隧道控制点与A4标隧道控制点进行联测。
通过同一组静态GPS(共8台)对所有点进行采集数据,观测时间为90分钟,有效观测卫星≥4,相邻两个同步观测采用:国家测绘局颁布的《全球定位系统(GPS)测量规范》(CH2001-92),JTG C10-2007《公路勘测规范》技术要求,最后对所有数据进行软件平差。
充分利用GPS测量的优点,实测GPS控制点27个,其中已知点16个,未知点11个,组成最小同步环736个。
其中总基线数为155条,独立基线49条,其中必要基线26条,多余基线23条,平均重复设站数为2/站。
满足《公路勘测规范》三等导线网规定的2/站。
(后附GPS控制网)2.GPS观测在实际外业观测过程中,使用4台Trimble-R8型GPS接收机和4台中海达V8接收机,同时在8个GPS点上进行观测, 有效观测卫星数≥4颗, 时段长度≥90分钟,如果有的点不搬站, 则不关机,以保证尽可能长的时段长度。
丈量天线高度, 均从天线的三面丈量三次, 在三次较差不大于3mm时,取平均值为最后结果。
结束观测时, 再丈量一次天线高, 以作校核。
在观测过程中, 自始至终有人值守, 并经常检查有效卫星的历元数是否符合要求,否则及时通知其它两台仪器, 延长时段时间, 以保证观测精度。
实际上在观测过程中,Trimble-R8型GPS接收机和中海达V8接受机电量充足,接收信号稳定,卫星数大都保持在7-8颗,有时高达10颗以上,为后面的平差处理之顺利进行打下了良好的基础。
六、外业数据处理及检核1.外业数据处理外业观测后及时输入计算机, 并进行外业数据的检查。
根据自动处理基线向量的结果,检查基线向量方差比(Ratio)、中误差(RMS)以及天线高等, 方差比>2 ,中误差(RMS)<20mm,参与解算的向量均符合要求。
结果参见附表(平差计算报告:基线解算报告)2.外业观测质量的检核根据《GPS规范》要求,各级GPS基线精度计算公式如下σ按三等控制网精度要求,取a≤10mm ,b≤5ppm ,D=1.223Km (平均基线边长)代入上式,经计算得:σ=11.7mm (平面)闭合环检验根据《公路勘测规范》要求,闭合环坐标闭合差Vx=Vy=Vz≤Vs(水平差)≤±33.1mm经抽查736个闭合环,成果精度如下表(详细请见平差报告):最差水平差为24.3mm≤33.1mm,闭合环合格。
重复基线检查根据《公路勘测规范》要求,重复基线测量的差值为ds≤±=±33.1mm重复基线测量的差值如下表:最大基线互差B21为9.9mm≤33.1mm,基线结算合格。
详见附表(平差计算)。
七.平差计算基线处理成功后,即可进入软件的网平差界面,进行WGS-84坐标系下的自由网平差及三维约束网平差。
1.GPS点WGS-84坐标系大地坐标及其精度根据《公路勘测规范》要求,无约束平差中,基线分量的改正数绝对值应满足VΔx=VΔy=20.3mm VΔVΔx=28.6mm基线的精度如下表:观测从点到点观测距离基线分量改正IDB204LN017 LN032 3597.2145m .0163mB209LN018-3 LN017 468.8622m .0017mB132LN032 LN032-2 1415.3314m -.0052m B13LN033 LN032 581.3094m -.0044m B155LN032-3 LN032-2 1062.5370m -.0057m B89LN032-2 LN032-1 982.7541m .0146mB56LN033 LN032-2 834.0353m -.0039m B131LA031 LN032 1517.7848m -.0047m B201LN018 LN017 557.6383m .0085mB142LN035 LN036 741.1067m -.0084m B192LN018-3 LN032 3296.7480m .0153mB157LN032 LN032-3 984.7021m .0063mB135LN018 LN032 3040.7215m .0138mB27LN032-2 LA035-1 1515.3612m -.0048m B196LN017 LN033 4149.7111m .0062mB83LN032-2 LN032 1415.3314m -.0062m B128LA032 LA035-1 635.9222m -.0015m B144LA040 LN036 426.8358m -.0016m B143LA042-1 LN036 853.5851m -.0029m B59LN032 LN033 581.3094m -.0110m B181LN032-1 LN032-2 982.7541m -.0003m B164LN035 LA040 478.1368m -.0056m B130LN032-3 LN032 984.7021m .0030mB174LN032 LN032-1 667.6976m -.0108m B126LA031-1 LA035-1 1045.6258m -.0010m B38LA042 LN036 827.9900m .0012mB65LN032-1 LA030 580.1045m .0084mB184LN018-3 LN033 3829.6365m .0045mB200LN018 LN017 557.6383m .0017mB81LN032-1 LN032-2 982.7541m -.0030m B16LN018 LN033 3592.1203m .0023mB61LN032-1 LN033 414.8197m -.0036m B124LA035-1 LA032 635.9222m .0039mB202LN017 LN032-3 4064.3616m .0063mB17LA030 LN032-2 420.7088m .0059mB165LN035 LA042-1 379.7457m -.0017m B62LN032-3 LA030 1085.2711m .0001mB156LN032-1 LN032-3 1159.3578m .0066mB48LN031-2 LA032 896.5954m .0002m B14LN032-2 LN033 834.0354m .0073m B25LA037 LA035-1 1178.5714m -.0036m B73LA037 LA036-2 631.0679m .0037m B26LA030 LN032-2 420.7088m -.0012m B171LA031 LN032-2 742.4495m .0023m B127LA035-1 LA031 1110.9902m -.0008m B159LN032-1 LN032-3 1159.3578m .0065m B172LN032-1 LA031 865.4403m -.0025m B133LN032-1 LN032 667.6976m -.0016m B54LN033 LN032-3 744.8012m -.0022m B82LN032-2 LN032-3 1062.5370m -.0012m B58LN032-3 LN033 744.8012m .0067m B57LN033 LN032-1 414.8197m .0051m B22LA037 LA036-1 831.5670m .0032m B80LN032-2 LA032 919.4778m -.0033m B137LN018 LN032-1 3681.8698m .0051m B162LN032-1 LN032-3 1159.3578m .0029m B90LA041-1 LN036 934.6115m .0003m B105LN032-1 LA030 580.1045m -.0009m B145LN035 LN036 741.1067m -.0041m B70LA037 LN036 1748.6958m -.0042m B208LN018-3 LN017 468.8622m -.0022m B206LN017 LN032-1 4235.7008m .0087m B129LN032-1 LA035-1 1975.7843m .0004m B52LN031-2 LA032 896.5954m .0005m B39LA042 LN035 839.3925m -.0043m B24LA037 LA036-1 831.5670m -.0021m B72LA037 LA042-1 1869.8873m -.0050m B100LA036-1 LA032 1591.8734m -.0001m B179LA032 LA036-2 1222.4365m .0021m B114LA043 LN036 952.3647m .0015m B134LN018 LN032-3 3515.8396m .0062m B104LA030 LA032 934.0389m .0003m B190LN018-3 LN032-3 3685.9976m .0066m B170LN032-1 LA031 865.4403m .0000m B189LN018 LN018-3 391.9454m -.0013m B51LN031-2 LA031 999.5365m -.0006m B166LN035 LA036-2 2043.7541m .0010m B153LN032-1 LA031-1 1067.5225m .0020mB125LA035-1 LA036-2 587.2959m -.0022m B169LA032 LA031 506.7948m .0021m B122LA035-1 LA031-1 1045.6258m .0022m B53LN031-2 LN032-1 1682.4459m .0022m B46LN031-2 LA031-1 627.7491m .0026m B74LA037 LA031-1 2205.2069m -.0028m B198LN032-2 LN017 4952.1309m .0045m B103LA030 LA031 538.2678m -.0005m B47LN031-2 LA031 999.5365m .0013m B176LN032 LN032-1 667.6976m .0022m B188LN018 LN018-3 391.9454m .0026m B95LA036-1 LN035 1867.3965m .0023m B194LN018-3 LN032-1 3951.2377m .0058m B177LA042-1 LA040 442.1771m -.0012m B85LN032-2 LN032-1 982.7541m .0063m B123LA035-1 LA031 1110.9902m .0028m B50LN031-2 LA031-1 627.7491m -.0014m B79LN032-2 LA031 742.4495m -.0028m B119LA039 LN035 584.3123m .0006m B23LA037 LA039 917.5927m -.0027m B160LN032 LN032-3 984.7021m .0043m B163LN035 LA042-1 379.7457m .0000m B43LA038 LN035 929.6635m .0010m B154LA031 LN032-3 1622.8426m .0012m B75LA037 LA031 2284.9467m -.0025m B91LA041-1 LN035 739.5801m -.0019m B152LA031-1 LA032 632.2321m .0015m B115LA043 LN035 1054.3289m -.0028m B49LN031-2 LA036-2 1224.3068m -.0005m B168LA031 LA036-2 1694.5867m .0010m B99LA036-1 LA031 1995.9554m -.0014m B78LN032-2 LA031-1 1164.1081m -.0025m B35LA030 LA035-1 1569.9564m -.0012m B149LA031-1 LA032 632.2321m -.0015m B102LA030 LA031-1 923.4954m .0000m B4LA037 LA038 567.9228m -.0015m B44LA038 LA042-1 1302.3882m -.0030m B45LA038 LA036-2 1129.7894m .0007m B40LA042 LA042-1 548.5908m -.0022m B77LA037 LA036-2 631.0679m -.0014mB96LA036-1 LA042-1 2184.8366m -.0013mB121LA039 LA036-2 1461.0017m .0006mB12LN031-2 LA035-1 869.6238m -.0004mB55LN033 LA031 1046.2550m -.0015mB180LN032-1 LA032 1364.9534m .0012mB71LA037 LN035 1495.3616m -.0016mB147LA036-2 LN036 2372.2640m -.0011mB120LA039 LA042-1 953.5226m -.0021mB178LA042-1 LA036-2 2402.3487m -.0025mB97LA036-1 LA036-2 554.5474m -.0011mB98LA036-1 LA031-1 1773.1811m -.0004mB150LA031-1 LA036-2 1580.9015m .0012mB11LN031-2 LA030 1532.2917m -.0011mB148LA031-1 LA031 421.7995m -.0013mB7LN031-2 LA037 1847.0332m -.0012mB146LA042-1 LN036 853.5851m -.0002mB5LA038 LA036-1 1077.9081m .0014mB94LA036-1 LN036 2352.6467m .0001mB167LA031 LA032 506.7948m -.0010mB42LA038 LN036 1281.0393m -.0013mB33LA036-1 LA039 1328.6357m .0011mB118LA039 LN036 1047.3083m -.0006mB76LA037 LA032 1791.0496m -.0005mB92LA041-1 LA042-1 386.5222m -.0007mB116LA043 LA042-1 761.5056m -.0009mB34LA035-1 LA036-1 991.7513m -.0004mB101LA036-1 LA036-2 554.5474m .0007mB117LA043 LA040 673.0043m -.0007mB93LA041-1 LA040 528.7958m .0000mB6LA038 LA039 349.6863m -.0002mB9LN031-2 LA035-1 869.6238m .0002mB8LN031-2 LA036-1 1250.4035m -.0003mB151LA031-1 LA031 421.7995m .0000mB32LA041-1 LA043 410.0753m .0002mB41LA042 LA040 488.0185m .0000m最大为16.3mm≤28.6mm,自由网平差结果合格,可以进行约束网平差。